基于粒子群寻优的汽车自适应巡航预测控制
2021-03-19 11:23周稼铭张亮修衣丰艳彭剑坤
北京理工大学学报 2021年2期
周稼铭, 张亮修, 衣丰艳, 彭剑坤
(1.北京理工大学 机械与车辆学院,北京,100081;2.上海保隆汽车科技股份有限公司,上海,201619;3.山东交通学院 汽车工程学院,山东,济南 250357;4.东南大学 交通学院,江苏,南京 211102)
汽车自适应巡航控制(adaptive cruise control,ACC)系统能够实时有效地控制自车车速和自车与前车的安全车距,是汽车实现智能辅助驾驶的首要系统之一. ACC系统涉及到的控制方法可以归纳为最优控制[1-2]、滑模变结构控制[3-4]、模糊神经网络控制[5-6]、模型预测控制[7-8]、多模式切换控制[9-10]等.
模型预测控制能有效解决多优化目标及约束问题,并能弥补模型失配、时变、干扰等引起的不确定性,成为近年来研究和应用的热点[11-12]. 然而这种带约束的优化问题转化为二次规划问题求解时,易出现找不到全局最优解的情况[13-14]. 为此,本文研究一种基于粒子群寻优的汽车自适应巡航预测控制算法,建立一种包含前车加速度扰动的自适应巡航系统车间纵向运动学模型,设计二次型多目标优化性能指标函数和多参数约束条件,构建自适应巡航预测控制优化命题,基于粒子群优化算法求解最优控制律,最后仿真验证可行性.
1 自适应巡航车间纵向运动学建模
图1给出了ACC车间纵向运动学关系,建立跟车系统状态方程[15]
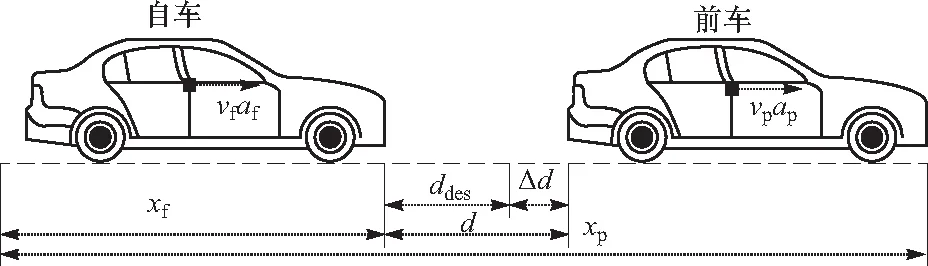
图1 ACC车间纵向运动学示意图Fig.1 Schematic diagram of longitudinal kinematics between ACC vehicles
(1)
式中:
Δv=vp-vf;ddes=τhvf+d0;
u=afdes;v=ap;Δd为车间距误差;Δv为前车与自车相对速度;af为自车实际加速度;d和ddes分别为实际车间距和期望车间距;vp和vf分别为前车速度和
自车速度;τh为车间时距;d0为自车停止后与前车最小安全车距;KL为系统增益;TL为时间常数;afdes为自车期望加速度;ap为前车加速度,可看作系统扰动.
对式(1)离散化,得到线性离散状态空间方程

(2)

(3)
式中:
2 多目标自适应巡航预测控制算法
2.1 目标函数和约束条件
综合车距误差、相对车速、自车加速度和冲击度,建立二次型多目标优化性能指标为
J=wΔdΔd2+wΔvΔv2+

(4)
式中:wΔd,wΔv,wEa,wEda分别为车距误差、相对车速、期望加速度和期望冲击度对应的权系数.
约束条件如下
(5)

2.2 预测控制算法
假定当前时刻为t,建立预测型目标函数如下
(6)
式中:N为预测时域;wy,wEa,wΔEda分别为系统输出量权系数、控制量权系数、控制增量权系数,相应表达式为
建立预测型输入、输出约束条件如下
(7)

在t时刻,自适应巡航预测控制可看作求解如下优化问题,即
(8)
3 基于粒子群寻优的预测控制律求解
3.1 粒子群算法
粒子群优化(particle swarm optimization,PSO)算法是1995年Eberhart和Kennedy博士提出的,源于对鸟群捕食行为的研究. 其核心思想是利用群体中个体对信息的共享从而使得整个群体的运动在问题求解空间中产生从无序到有序的演化过程,从而获得问题最优解[13].
在PSO中,每个优化问题的潜在解都可以看作D维搜索空间上的一个点,称之为粒子,一个由m个粒子组成的群体在D维搜索空间中以一定的速度飞行. 第i个粒子的位置和速度分别表示为xid=[xi1xi2…xiD],vid=[vi1vi2…viD],1≤i≤m,1≤d≤D. 第i个粒子经历过的历史最好点表示为pi=[pi1pi2…piD],群体内所有粒子所经过的最好点表示为pg=[pg1pg2…pgD],g∈{1,2,…,m}. 粒子速度和位置的更新方程为
(9)
(10)
式中:c1和c2称为学习因子;r1和r2为均匀分布于[0,1]之间的两个随机数;ω为惯性权重,其数值决定对粒子当前速度继承的多少.
3.2 基于粒子群寻优的ACC预测控制律求解
为便于粒子群寻优,系统输出方程(3)和目标函数(6)转化为如下形式,即
Y=Mxx(k)+MuU+MvV
(11)
YTWyY+UTWuU+ΔUTWΔuΔU
(12)
式中:Y为预测时域内的系统输出;U为预测控制量;ΔU为预测控制增量;V为预测外部干扰.
系数矩阵表达式为
Wy=diag[wywy…wy];
Wu=diag[wEdawEda…wEda];
WΔu=diag[wΔEdawΔEda…wΔEda].
联合式(11)(12),得到以预测控制增量ΔU为优化变量的规范目标函数如下

(13)
式中:
约束条件式(7)也统一写为以预测控制增量ΔU为优化变量的规范形式,即
ΩΔU≤T
(14)
式中:
以式(13)为目标函数,式(14)为约束条件的二次规划问题可以通过有效集法(active set method,ASM)进行求解,但因为存在多个约束条件,易导致无全局最优解的情况,本文采用粒子群算法寻求最优控制律[15]. 将ΔU作为PSO优化变量,粒子群中各个粒子的维数就等于预测时域N,并选取式(14)作为计算各个粒子适应度的目标函数. 步骤如下:
① 在t时刻,实时采样获取自适应巡航系统已有输入量和状态量;

③ 利用PSO优化计算得到新的控制序列;
④ 重复②和③,寻求满足要求的最优控制序列
ΔU*=
[Δu(t|t)*Δu(t+1|t)*…Δu(t+N-1|t)*];
⑤ 将最优控制序列ΔU*的第一个分量作为控制输入增量,则最优控制量u(t)*=Δu(t|t)*+u(t-1);
⑥ 令t=t+1,转步骤①.
4 结果验证
在MatlabSimulink环境下仿真验证本文所提出的基于粒子群寻优的自适应巡航预测控制算法,仿真参数见表1.
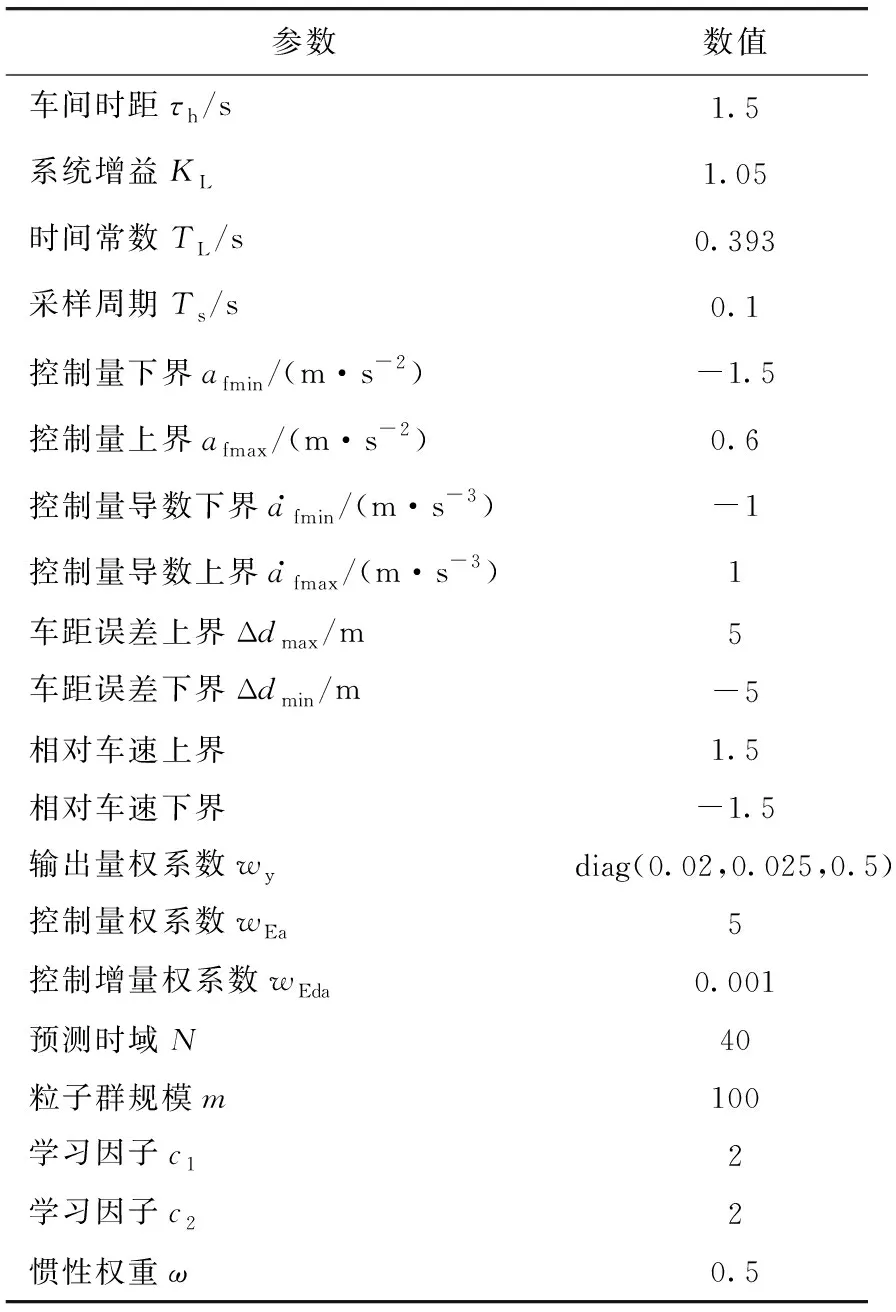
表1 仿真参数Tab.1 Simulation parameters
在2种不同工况下验证控制算法,工况1:前车先减速后加速工况;工况2:前车先制动后匀速工况. 并将粒子群优化(PSO)求得的控制律整车作用结果与有效集法(ASM)求得的控制律整车作用结果进行对比.
4.1 前车先减速后加速工况
前车初速度为20 m/s,在6 s左右时减速至12 m/s,然后在12 s左右时又加速到20 m/s,之后一直保持匀速行驶,仿真结果如图2~图5所示.
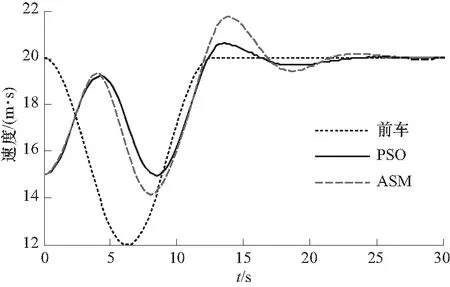
图2 前车先减速后加速工况时速度变化曲线Fig.2 Speed curve of acceleration condition after deceleration of the preceding vehicle
由图2知,因自车初速度小于前车初速度,故自车先加速,之后因前车减速,自车车速出现一定超调波动,最终随前车的匀速行驶而进入稳态跟车阶段,与ASM算法相比,PSO算法对应的波动峰值较小,收敛速度较快. 由图3可知,ASM算法和PSO算法最终都能控制车距趋于期望车距,但PSO算法控制下的车距误差较小. 由图4和图5可知,与ASM算法相比,PSO算法控制下的加速度和冲击度峰值较小,收敛速度较快.
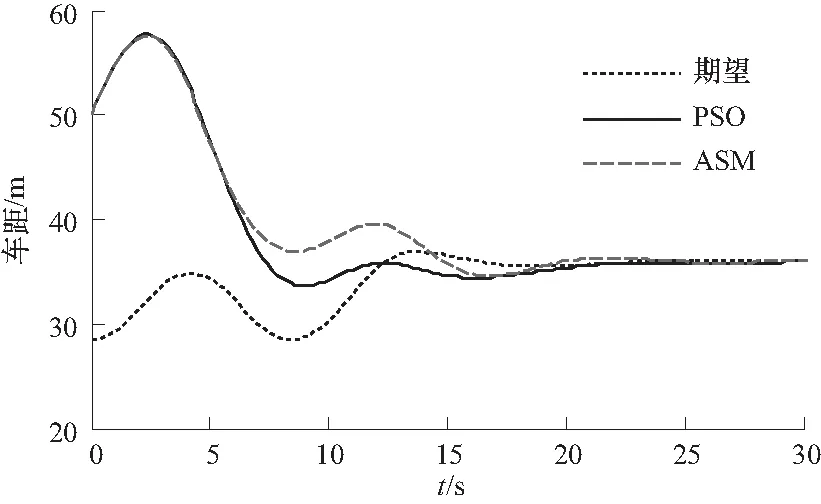
图3 前车先减速后加速工况时车距变化曲线Fig.3 Distance variation curve of acceleration condition after deceleration of the preceding vehicle
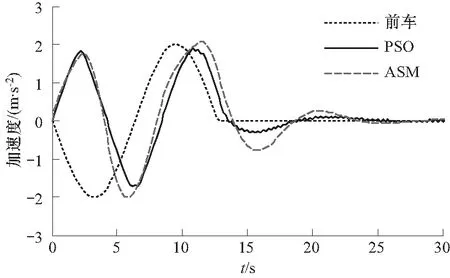
图4 前车先减速后加速工况时加速度变化曲线Fig.4 Acceleration curve of acceleration condition after deceleration of the preceding vehicle

图5 前车先减速后加速工况时冲击度变化曲线Fig.5 Impact curve of acceleration condition after deceleration of the preceding vehicle
表2所示为10~15 s之间相对车速和车距误差绝对值最大值的比较,可以看出PSO算法的相对车速和车距误差明显小于ASM算法.
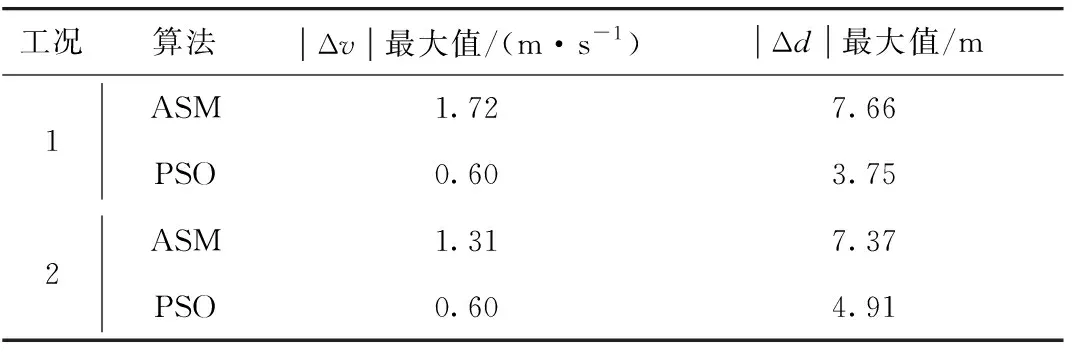
表2 定量结果对比Tab.2 Comparison of quantitative results
4.2 前车先制动后匀速工况
前车以20 m/s的初速度开始减速,在15 s时减速至10 m/s,之后一直保持匀速行驶. 仿真结果如图6~图8所示,可以看出,ASM算法和PSO算法都能实现有效跟车功能,因自车初速度小于前车初速度,故自车车速先增加后减小,最终收敛于前车车速. 与ASM算法相比,PSO算法收敛速度更快.
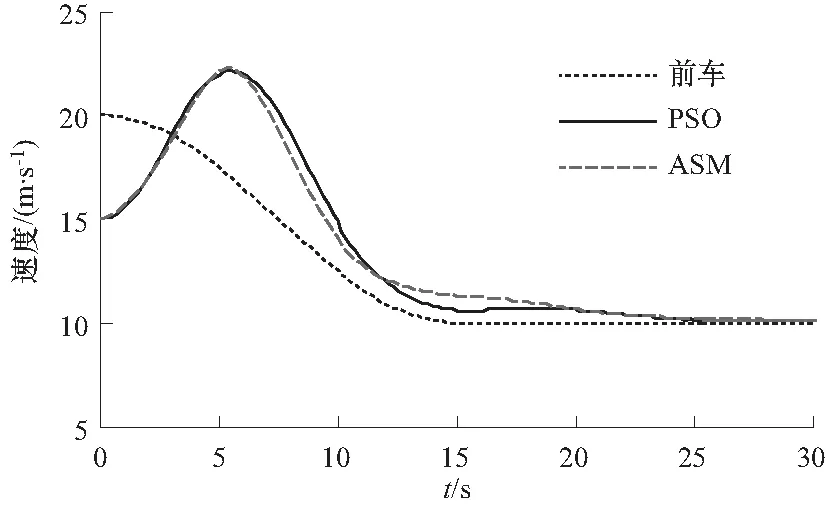
图6 前车先制动后匀速工况时速度变化曲线Fig.6 Speed curve of constant speed condition after braking of the preceding vehicle
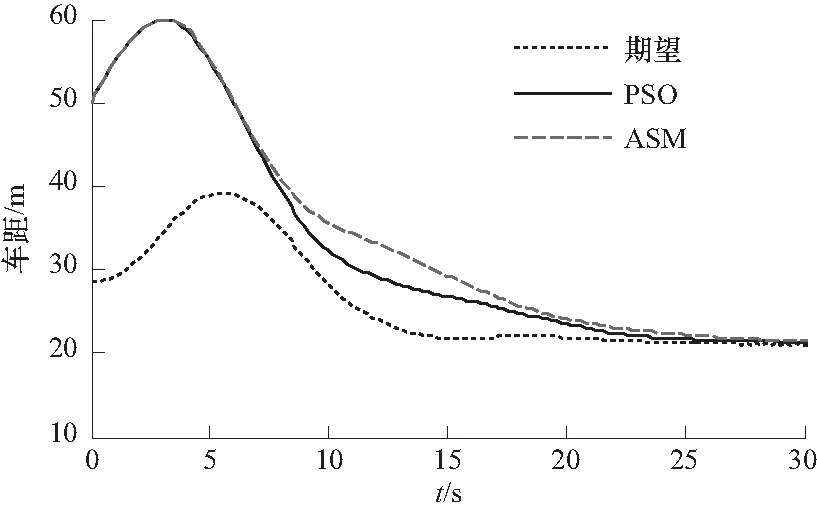
图7 前车先制动后匀速工况时车距变化曲线Fig.7 Distance variation curve of constant speed condition after braking of the preceding vehicle
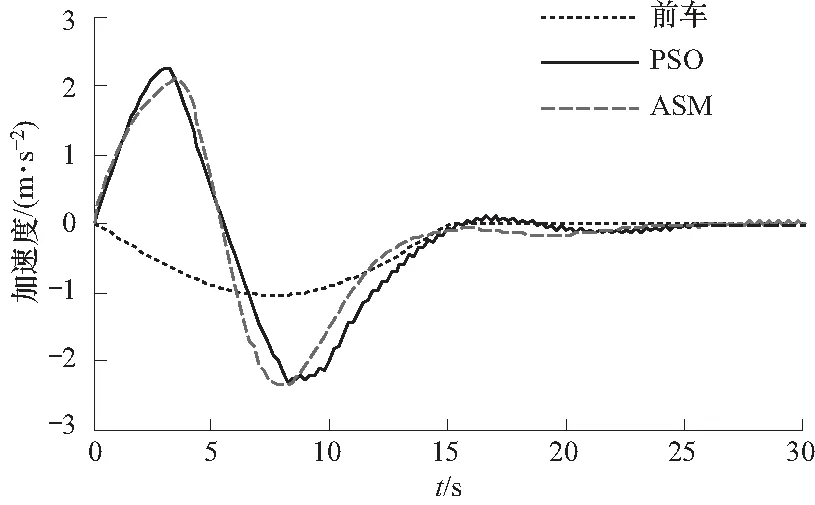
图8 前车先制动后匀速工况时加速度变化曲线Fig.8 Acceleration curve of constant speed condition after braking of the preceding vehicle
5 结 论
① 提出了一种基于粒子群寻优的汽车自适应巡航预测控制算法,用于提升多目标自适应巡航的控制精度,以提高跟车的响应速度和自适应性.
② 建立了一种包含前车加速度扰动的自适应巡航系统车间纵向运动学模型,并对其线性离散化. 综合车距误差、相对车速、自车加速度和冲击度,设计二次型多目标优化性能指标函数和多参数约束条件,构建自适应巡航预测控制优化命题.
③ 为便于问题求解,将目标函数和约束条件推导转化为以预测控制增量为优化变量的规范形式,并基于粒子群优化算法求解自适应巡航预测控制的最优控制律,仿真结果表明,粒子群算法求解的最优控制律能够控制自车保持更好的跟踪性和自适应性.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
当代水产(2022年6期)2022-06-29
金桥(2018年4期)2018-09-26
课程教育研究(2017年37期)2017-10-20
新高考·高一物理(2015年5期)2015-08-18
新高考·高一物理(2015年5期)2015-08-18
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14
棋艺(2000年18期)2000-06-14