水下机器人水声定位系统硬件的设计与实现
2021-03-19 01:09
科学与信息化 2021年5期
浙江华东测绘与工程安全技术有限公司 浙江 杭州 310014
1 水下机器人水声定位系统概述
水声定位大致可分为两类: 基于距离的定位和无距离的定位。基于距离的方案首先通过 ToA、 RSS、 AoA 甚至网络连通性测量或估计少数锚节点的距离或角度,然后应用三角测量或多方法将范围转换为坐标。无距离方案探索局部拓扑,并从周围锚节点的位置推导出位置估计。一般来说,基于距离的方案具有较高的位置精度,而无距离的方案提供了较粗的位置估计。
2 水下机器人定位系统硬件设计需求分析
2.1 研究现状
与海洋研究有关的关键技术方面的最新进展使科学界能够将其努力引向提升水下机器人航行器,使其在海上执行的海洋干预任务具有更高的自主性。一些目标,如自主知觉,任务识别,以及机器人操作器的干预,正在进行中的研究。干预式自主水下机器人(I-AUV)在海洋打捞、环境监测和监视、河口、港口、石油钻机和管道的水下检查、地质和生物调查等广泛的研究和商业领域中得到应用。在诸如机械臂操纵器、推进器、方向舵和鳍等系统中,海洋水面和水下机器人车辆上的导航系统起着一个关键作用,它允许车辆相对于一个固定的坐标框架或相对于另一个车辆进行合作导航和自导/对接操作。此外,这些导航系统的开发必须牢记低成本、紧凑、高性能、通用性和鲁棒性等关键特性。
2.2 需求分析
从无数可用的水下导航辅助传感器,如多普勒测速仪(DVL) ,深度压力传感器,磁罗盘,声学定位系统,如长基线(LBL) ,短基线(SBL)和超短基线(USBL)常常作为水下定位的主要选择。超短基线传感器由小型紧凑的声学换能器阵列组成,可以根据应答器发出的声波信号的传播时间,计算应答器在车辆坐标系中的位置[1]。
3 水下机器人水声定位系统硬件设计
3.1 功能分析
尽管长基线(LBL)和短基线技术等其他声学定位系统具有优势(和固有的缺点) ,但我们选择USBL技术的主要原因与设计一种低成本、快速部署的水下环境定位工具有关。例如,LBL 技术以昂贵著称,并且在任何时候改变操作区域都需要一个先验校准阶段。此外,从一个潜水员的角度来看,我们的目标是开发一个快速部署和高机动性的原型,用于目标跟踪场景。例如,假设一个潜水员想要一直跟踪母船的位置,反之亦然。在这种情况下,只使用我们的原型可以提供一个快速和方便的解决方案。因此,根据 PONTUS 发展的主要目标,并针对上述商业解决方案,我们的目标是为科学界提供一个多功能的、高性能的、低成本的水下跟踪移动目标的工具,提出一个高度可配置的阵列,除了能够访问该系统的物理变量,这在未来可用于设计新的紧耦合定位和导航算法。此外,应答器与USBL 阵列(或阵列)之间实现的声音通信依赖于直接序列扩频(DSSS)调制信号,允许多个同时组成的操作。

图1 便携式水下场景导航工具(PONTUS)概念设计示意图
本文提出了两种估计超短基线参考坐标系中转发器位置的封闭式方法,并利用从无到有开发的超短基线中的实际实验数据对这种定位方案进行了实验验证。第一种方法采用到达超短基线阵的声波的平面近似,这种方法适用于远程作战(例如车辆自动导引到某个站点) ,因为超短基线与应答器之间的距离远大于基线。提出的第二种方法不采用平面波近似,保持了基本的非线性框架。考虑后一种方法是因为在非常近距离的作业中需要精确定位(例如水下航行器与三叉戟项目中将考虑的自主水面航行器的对接作业) ,在这种作业中,平面波近似可能无效。在此基础上本文介绍了一种用于水下目标定位的低成本移动导航工具 PONTUS 的研制过程。庞图斯由一个综合的超短基线声学定位系统辅助一个惯性导航系统组成。根据实际设计,它可以安装在水下机器人车辆或由潜水员操作。
3.2 电路设计
对于任何相干检测问题,通过将输入信号通过一个脉冲响应为期望信号时间反转副本的匹配滤波器,可以很好地估计信号的到达时间(TOA)。在理想情况下,滤波器输出与接收信号的自相关函数有关。特别设计的扩频调制信号具有良好的自相关特性 ,使匹配滤波器的输出更加清晰,并提高了检测器的性能。此外,几个扩频信号之间可以获得良好的互相关特性,从而允许多用户配置,在这种配置中,几个实体可以同时传输信号而不受干扰。
这种特殊设计的信号通常使用跳频扩频(FHSS)或直接序列扩频(DSSS)码产生。一般来说,与传统信令(正弦脉冲和 CHIRP 突发)相比,扩频信号在水下距离估计方面有几个优点:它们具有更好的信噪比(SNR)、对周围环境和干扰噪声的鲁棒性、多用户能力、改进的检测抖动以及更好地解决水声信道传播中最大的问题之一——多径问题。
本节介绍两种在参考坐标系中估计应答器位置的封闭形式的方法。第一种方法是利用声波的平面近似计算转发器的位置,这里称为平面波法。对于水下航行器的实际任务情况,接收机之间的距离比传感器阵列和应答机之间的距离小得多,因此对于声波的平面波近似是有效的。PW 方法是基于这种近似来获得转发器的距离和方向的。然后在体坐标系中计算位置,该坐标系的原点被认为与水听器的质心重合。球面插值(SI)方法是基于方程误差公式。该方法不需要平面近似,直接计算应答机在体框架中的位置。球面交点法的优点是定位精度在整个定位范围内不会发生很大变化,但其基于同步定位方式,对系统时钟要求较高。用水听器精确地测量了声波传递时间。在进行定位之前,应避免影响系统时钟定位的工作环境变化、设备老化等因素,确保定位精度。双曲型交点法对时钟精度要求不高,可避免同步定位法带来的系统误差,但由于阵元之间的延迟差一般只比其他测量值小,因而对延迟差的测量精度也有很高的要求。另外,双曲线交点定位法在整个测量范围内的精度是不同的。当目标到矩阵的距离增大时,目标的定位精度将下降。实验结果表明,该定位算法的稳定性优于球面交点解的稳定性。两者都有各自的优点和不足,在实际应用中还要根据具体情况来决定[2]。
3.3 系统综合
本文系统的主电源为236.8-Wh 锂聚合物(LiPo)蓄电池组件,由416ah 电池组装而成,每个电池额定电压为14.8v。电池监视器(BATMONIT)板,内部开发,监测整个电池终端的充电和放电率,也电流,因此防止短路,过载或充满放电,可能会造成不可逆损害的电池。此外,BATMONIT还可以读取连接在丙烯酸管内壁上的电动转换开关的输出,提供一个开/关开关,用于电池供电。该板可以不间断地监控系统的剩余功耗(关闭电流 < 1μA)与系统的总电流消耗。在进行数字处理之前,原始的声信号(每个水听器一个)首先通过以25kHz为中心的带通二阶巴特沃斯滤波器。产生的滤波/输出信号然后通过VGAmps传递,其增益通过DSP的数字模拟输出来控制,方法是利用它们的能量或它们的瞬时最大值作为调整标准。主板是一个高性能的32位浮点 D.Module.C6713,操作频率为300mhz,具有直接内存访问(DMA)控制器,允许后台数据传输与高优先级计算同时进行。该板(通过自堆叠设计)连接到16位D.Module.ADDA16板,其中包括4个16位分辨率的每秒250千取样ADC,以及4个16位分辨率的数模转换器。四个水听器中的每一个都与一个 VGAmp 相连,VGAmp 的输出为 d. module.adda16上的四个 ADC 终端供电。为了实现声学投影仪的接口,除了需要一个升压和阻抗匹配电路外,还需要一个开关功率放大器。就此而言,设计了一块名为 PwrAmpD 的新板。简而言之,阻抗匹配电路由一个简单的 RLC 电路组成,使用了单螺线管在新的25khz 谐振频率范围内调谐成一个非常窄的频带传输函数。总之,PwrAmpD 是一种高效的D类开关模式放大器板,具有高于90% 的效率和低信号失真的特点。此外,它优化驱动声学投影机和驱动的脉冲宽度调制(PWM)波形的最高频率为1兆赫。模块集成了一个用于实现 PWM 调制器的复杂可编程逻辑器件,由此产生的 PWM 信号驱动 PwrAmpD。因此,水下声学投影仪。此外,使用 PwrAmpD 中实现的阻抗匹配电路,可以对后一块板和声学投影仪进行微调,以最大限度地提高20到30千赫频段内的发送讯号的能量。然而,放大仅仅是信号发射优化过程的第一部分,目标是最小化接收端的故障百分比。为了充分利用直接序列扩频信号的优点,需要考虑声学投射器的带宽限制和非线性。简而言之,扩频信号的带宽并不完全在声学投射器的带宽之内; 因此,发射的信号永远不会完全与所需的信号相似。当在接收端运行匹配滤波器时,传输端的这些突然失真将产生负面后果。通过改变传输信号的方式,使后者在通过声学投影仪时形成信号,使其更接近预期信号。这种还原失真的过程被广泛地认为是一种均衡过程,其结果已成功地应用于水声投影机中。
在本文的实验过程中,使用水平放置的20厘米水听器的初步测试,由一个小型阵列的四个水听器放置在一个非平面3D 配置具有高度可配置的几何形状。接收声学阵列如图3所示,与其处理工作台(数字信号处理器、声学放大器、电池和其他几个系统)连接。接收阵列中所有水听器之间的距离大约为30厘米。接收阵列被绑在一个码头上,淹没在水下2.5米左右。发射 DSSS 编码信号的声音传感器被放置在距离 USBL 约21.5米的地方,左侧约2米,深2.5米,因为发射和接收都与精度为1 mu 的 GPS 1PPS时钟同步。为了产生 DSSS 信号,一个127芯片的 Gold Code 被用于 BPSK (二进制相移键控)调制25KHz 的载波信号。
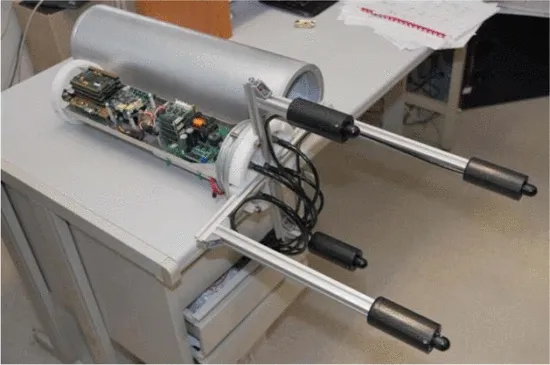
图2 声学阵列和核心处理系统示意图
在此基础上揭示了一个改进的互相关方法(交叉方法)相比,计算 TDOA 直接从 TOA 计算在每个通道(直接方法)。接收阵列被绑在一个码头上,淹没在水下2.5米左右。发射DSSS 编码信号的声音传感器被放置在距离 USBL 约21.5米的地方,左侧约2米,深2.5米,因为发射和接收都与精度为1 μ s 的GPS 1PPS 时钟同步。为了产生直接序列扩频信号,采用127芯片 Gold Code 对25KHz 的载波信号进行调制。本文提出了一种新的更简单、更有效的测量各通道的 TOA 的方法: 一旦信号在声处理缓冲器中被检测到,首先对匹配滤波器的输出进行预处理,去除所有只留下局部最大值和下降值的上行斜率的离散样本,然后从匹配滤波器的输出中减去基于匹配滤波器输出最大值的阈值,并选择第一个非负值作为信号的 TOA。在实践中,70% 的最大值被发现产生非常好的结果。经过一些预处理去除违反声学阵列物理限制的异常值之后,图3显示了定位策略与实际实验数据的结果。即使这样想,图3中验证和显示的数据也代表了888个完成的测量实验中的95% 左右[3]。
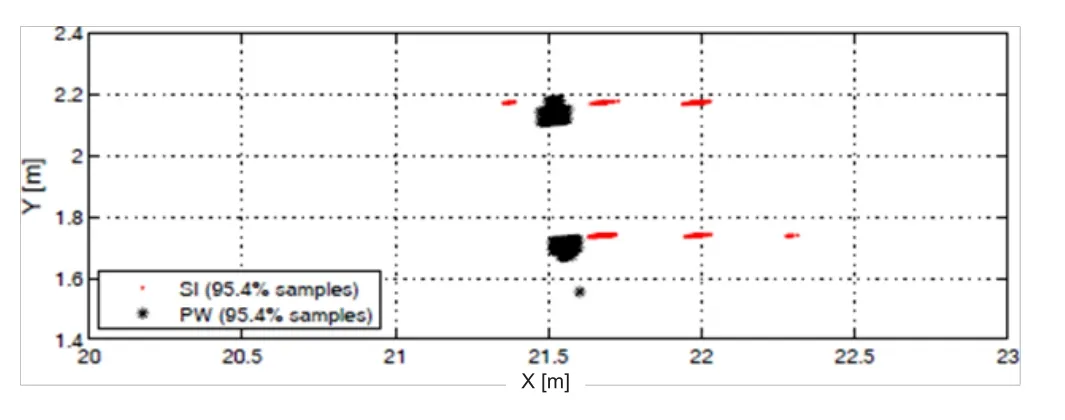
图3 静态定位结果示意图
从图3中的 XY 散射中可以看出,对于这个实验数据集的特殊情况,PW 方法显示了比 SI 方法更小的位置估计的离散度。实际上,SI 方法比 PW 方法对观测到的 TDOA 噪声更为敏感。在声波的平面波近似无效的情况下,SI 方法应该在更近的范围内更加精确。模拟结果预测,转发器的基线与斜距之比的阈值约为4%(基线为0.2 cm,斜距为5米)。在这个实验的特殊情况下,比率约为1.36% (基线为0.3厘米,斜距为21.5米)。因此,实际上应该在不久的将来进行更近距离的实验试验,以便用声学数据验证这一断言。两个点云证明了 PW 方法,这是一致的整体角度分辨率的阵列。也就是说,如果只用水平间隔的水听器来计算方位角,声学系统数字化实现的角分辨率将在1.15度左右。这在图4中变得很明显,它显示了由 PW 方法计算的方位角,并与在处理数据集中发现的1个样本声学检测噪声相干。
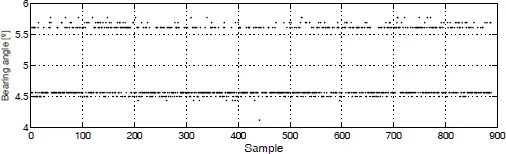
图4 用PW法测定方位角
在PW方法的深度计算方面,考虑到测试深度,结果是相当令人满意的,其中约77.4% 的样品测量深度为0米(正如预期的那样,因为阵列和发射器都放在同一深度) ,其余测量深度约为0.43米。这些结果表明,相当令人满意地考虑到严重的多路径从底部和表面,这是预期的非常浅的水道,其中进行了试验[4]。
4 结束语
综上所述,本文提出了两种利用超短基线定位系统估计水下应答机位置的封闭方法。利用自行研制的超短基线定位系统,利用实验数据对定位方案进行了验证,在高噪声和多径测试条件下,取得了满意的初步结果和良好的性能。对于港口试验中考虑的距离,基于平面波近似的方法比球面插值方法对传感器噪声的敏感性要低。未来的工作将集中在改进声波阵列的校准,测试系统在更远距离的试验中的性能,以及通过实验验证 USBL 融合技术和惯性导航系统的进一步改进定位系统。在较长的时间范围内,它还将着重考虑分层的水下声速剖面,以适当地适应变化的水下声速到滤波框架。
猜你喜欢
电声技术(2022年3期)2022-04-28
无损检测(2022年1期)2022-03-16
导航定位学报(2021年5期)2021-10-13
舰船电子工程(2020年9期)2020-10-30
家庭影院技术(2020年6期)2020-07-27
导航定位学报(2019年2期)2019-06-06
舰船电子对抗(2019年6期)2019-04-27
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02