
基于无人机遥感的村庄地理空间景观格局分析研究
2021-03-23 06:53于学广李芳芳
资源导刊(信息化测绘) 2021年2期
于学广 李芳芳
(1.河北翔通信息技术有限公司北京分公司,北京 海淀 100088;2.中科遥感科技集团有限公司,天津 滨海新区 300384)
1 引言
原始定居点是古代人类社会的基本地理单位,是根据特定的社会经济条件建立的。景观的空间格局被视为原始定居点的结构,它的形成与意识形态、精神信仰以及人与自然的关系密不可分,正确地保护和研究遗产景观至关重要[1]。
分析原始定居点的空间格局,现有研究主要基于风水学理论和地理环境要素,分析传统村庄的空间形态,这些特征是定性的,会简化景观的空间关系;而勘测和GPS 测量虽能获取详细的空间信息,但无法获取景观其他信息。近年来,城市化正快速侵蚀和重塑传统环境,破坏并改变了传统村庄的结构,迫切需要一种实时、客观、有效的数据采集手段以及可以扩展信息量的方法,分析原始定居点的地理空间格局。
本文提出将无人机获取的多光谱图像与分层景观识别方法相结合,用于原始村庄的地理空间格局分析。
2 研究区域概述
河北某古村落最初是在明朝(1368—1644 年)由驻军建造的,遵循“内部八字形”布局。该布局以祖堂为中心,形成一个近似圆的闭合环。灌溉系统发达,在包括水坝和运河在内的古代建筑中采用了一种分水机制,从而通过重力为大量农田灌溉。整个灌溉系统完好无损,得到了良好的保护。
然而,在城市化的推动下,近年来该村状况越来越糟。自然和人为因素使得大部分景观遭受侵蚀和破坏。村庄北部的演习场被完全摧毁。更多景观尤其是古代建筑,已被现代人工建筑取代,景观要素发生巨大变化。同时用于记录和描述此类更改的数据完全丢失。因此,急需用于遗产保护的实时、准确和量化数据。
研究对基于村庄的扩展区域进行了调查,以完整记录与该古老村庄相关的目标景观。研究区域地理位置如图1 所示,其中,白色多边形包括该古村落的范围,黄色多边形包括周围的六座山脉,蓝色多边形包含了该村庄的主要水道。研究区面积4.02 平方公里,地形条件复杂。在村庄内部,古建筑和新建筑交叉分布,导致某些地方的建筑间隔很小。古代建筑形状各异,而新建筑的颜色和质地则各不相同。
3 无人机影像获取及数据预处理
3.1 无人机影像获取
研究选用六旋翼无人机,搭载多光谱数据采集系统和测量级GPS,获取村庄航空影像并对数据进行空间定位。多光谱数据采集系统(如图2 所示)包含4个光学传感器,所有传感器均具有35 毫米固定光谱透镜和23.2 个光学传感器[2]。
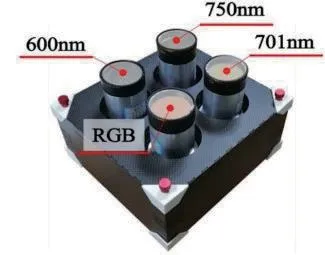
图2 无人机多光谱数据采集系统
2019 年8 月18 日至20 日完成数据采集,考虑到阳光强度和光角度,选择上午9:00 至11:00 采集数据。最终共获取1574 幅航拍图像,通过内置GPS 产生的三维位置信息(包括X、Y 和高度)对其进行了地理标记。
使用FieldSpec 4 Standard-Res 分光光度计实地测量了村庄内景观反射率。随机抽取了河流、道路、农田和建筑物等被测对象,采用350 ~1000 nm 的光谱范围、光谱间隔为1.4 nm,对地物进行光谱测量,用以对机载光谱仪获取的光谱数据进行真实性检验。此外,在基于大地GPS 的测量区域平均部署了地面控制点(GCP),以提高无人机影像几何校正精度。
3.2 无人机影像数据预处理
首先基于MATLAB 完成几何校正和多波段配准,然后基于Pix4D 软件进行图像镶嵌。在几何定标过程中,使用获得的内部方位角元素消除切向和径向变形,再基于Pix4D 软件平台进行图像拼接[3]。最后,通过特征识别和特征匹配创建稀疏点云,并将其用于TIN 三角网的构建。
输出数据包括经过校准的正射影像(DOM)和数字表面模型(DSM)。正射影像包含六个自定义通道(红色、绿色、蓝色、600 nm、701 nm 和760 nm),代表目标景观的光谱特征,空间分辨率为3.56 cm,确保可以在后续分析中使用精细的几何和纹理特征。此外,DSM包含景观的空间信息,可提供景观顶部的高程值。
4 研究方法
4.1 面向对象的分析技术
本文使用面向对象的图像分析技术(OBIA),可基于多维特征数据获取信息,已用于基于高分辨率航空遥感的地质灾害监测、城市变化监测、濒危物种监测、土地覆盖制图和农业管理等。
OB IA 的工作流程主要有片段生成和多维特征分类两个独立模块。片段生成模块首先定义特征空间度量,然后通过使用光谱、几何和纹理特征从基于像素的图像中形成图像对象。根据分割特征量的预设阈值确定对象大小。通过图像分割,创建基于对象的图层。同时,建立父对象、子对象和相邻对象间的关系,该关系包含上下文信息并有助于避免错误产生。子对象的属性从父对象继承。在多维分类模块中,语义信息分配给相应的片段。最后,获得不同类型景观的分类结果[4]。
4.2 在遗产保护范围内定义景观的结构规则
研究分类规则是提取感兴趣对象(受保护的遗产景观或对遗产遗址有潜在影响的景观)的标准,还有助于景观分类。图3 给出了三级分类规则,分为自然景观和人工景观。根据父类,区分第二级的六个子类。自然景观包括河流、山脉和植被,而人工景观则包括农用地、建筑和道路,第三级中的两个子类都在建筑范围内进一步分类(父类),包括古建筑和现代建筑。

图3 研究中使用的景观分类规则
4.3 遗产景观提取的分层方案
基于构建景观的结构规律设计了一种四级分类方案,将其用于研究区域中的目标物提取(如图4 所示)。该方案由五个独立的细分和分类模块组成。子类别的分类基于高层和相应特征产生的分类对象执行(如表1 所示)。在第一个分割和分类模块中,最初使用NDVI 指数(701 nm 被用作NIR)对植被覆盖区域和非植被区域进行分类。在第二个模块中,通过在DSM 灰度值上设置阈值提取山脉。另一方面,NDWI(750 nm被用作NIR)被用作对第三模块中包括河流和人工建筑区域在内的非植被区域进行分类。通过在第四类中使用DSM 值和形状指数(SI)进一步区分道路和建筑物。在第五分类中基于灰度共生矩阵(GLCM)、蓝带和600 nm 带,基于熵和同质性识别古建筑和新建筑[5]。
表1 中:NIR 代表红外波段;红色和绿色分别代表红色和绿色波段。P(i,j)是在GLCM 矩阵中定义的灰度等级(i,j)的概率;N 和M 是GLCM 每个维度的最大值。A 和e 分别表示图像段的面积和比值计。
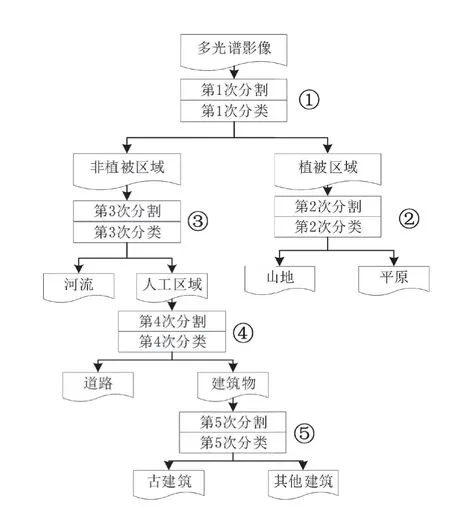
图4 用于景观提取的分层方案
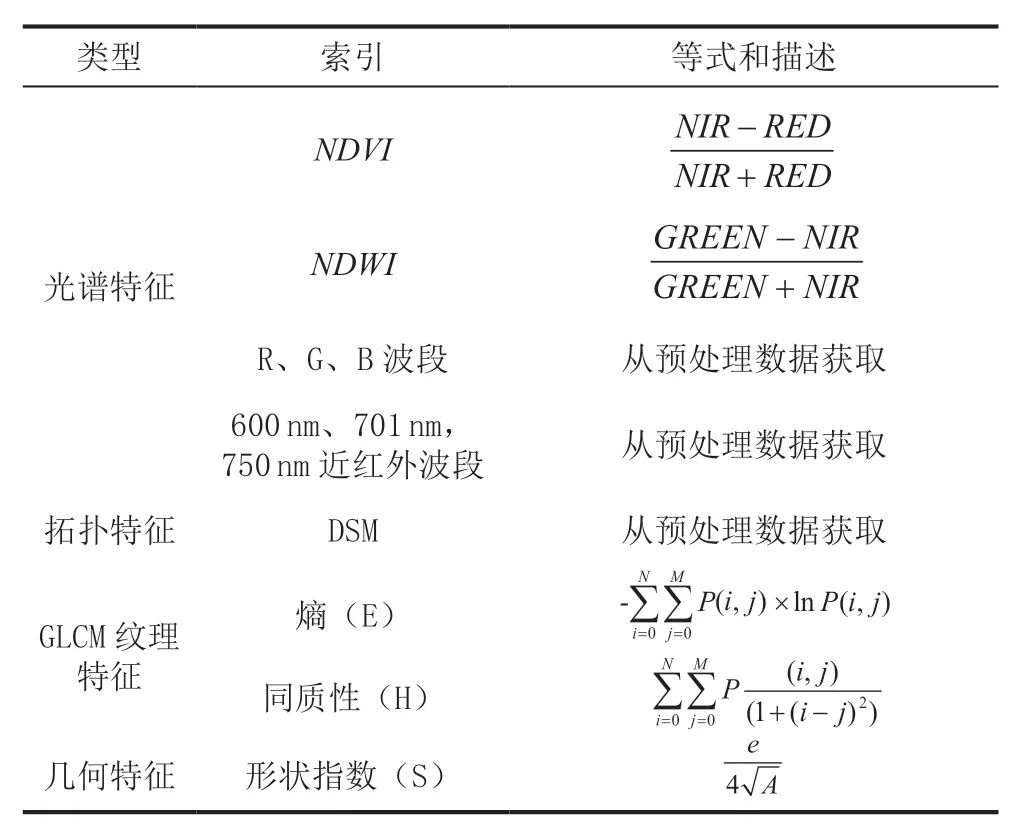
表1 用于目标景观识别的功能和索引
该方案中的每个独立模块还遵循一个程序实现,其中包含递归分割和分类(如图4 所示)。分割和分类都使用多光谱图像(仅适用于第一个模块)或图像对象(适用于其余模块)作为输入数据。在工作流中,首先检查输入数据的最小分析单位以匹配分类特征。如果输入数据可以在下一个分类中使用,则直接将其用作分类过程的输入数据。否则,将执行递归分割,直到将其用作下一阶段的输入数据为止。
5 基于GIS 的景观格局分析
5.1 文化遗产景观提取模型
基于eCognition 对五种分类进行评估,将0.08平方公里区域用作模型评估区域,其中包含从第一次分割生成的3069 个对象,这些物体的平均大小为27 m2, 表2 显示了对象样本的分配详细信息。子类中的标记对象根据超类对象获得,这些超类对象遵循层次结构方案中所示的关系。例如,古建筑的对象从小到大都属于建筑,而非人造建筑和非植被区域等。在每个分类级别中将属于不同类别的对象随机分为十个样本集,然后将这些样本集按9∶1 比例(无重复)进一步随机分为十组训练和测试数据集。每个构造的分类器分别用相应的训练和测试集进行十次训练和测试。
总体精度和Kappa 指数被用作定量描述构建方案性能的指标,两者都是基于误差矩阵计算的。通过交叉验证,平均值被用来代表最终的验证结果。通过将分类结果与测试数据集进行比较来获得矩阵,这些指标用于定量描述分类器的性能。如表2 所示,目标景观的总体分类精度是可变的,范围从0.843 到0.961,平均值为0.913。Kappa 指数也有一定程度的波动,最佳表现达到0.915,最差表现为0.763。通过手动设置基于知识的阈值以提取山峰轮廓来进行第二次分类。
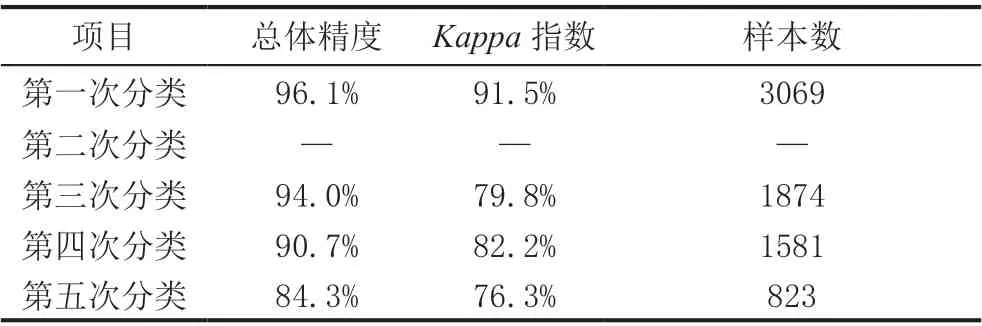
表2 评估结果
5.2 有针对性的景观提取结果
图5 显示了整个测量区域的提取结果,包含四个目标景观元素和新建筑物。通过将评估模型应用于预处理的多功能数据来生成结果。在此过程中,由于庞大的数据量,根据空间XY 坐标将整个区域平均分为六个子集(每个子集0.72 平方公里)。通过训练的模型对所有六个区域进行了分析,并将分析的区域缝合在一起以形成显示的结果。
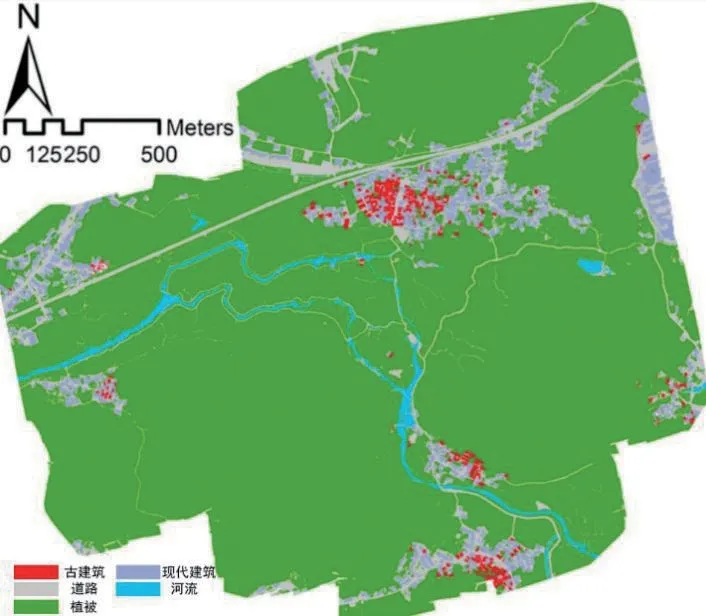
图5 目标景观元素的提取结果
由于准确的建筑物提取直接影响进一步的空间分析,因此通过计算模型提取结果和人工解释结果中拟合的像素数来定量研究提取精度。评估结果是通过随机采样20 个目标景观检查对象获得的。古建筑和道路的精确度分别达到0.792 和0.803,河流和植被的精确度分别为0.852 和0.904。
5.3 目标景观分布的地理统计分析
本文研究进行了空间分析,以调查自然景观要素(河流和山脉)与人工景观要素(古建筑和新建筑)之间的关系。这些自然因素是古村落的基本框架,在村落的形成和发展中起着关键作用,也与人类活动直接相关。
区域统计数据描述了目标景观的数量,该数量通过空间X、Y 坐标计算得出,如表3 所示。主要景观要素包括建筑物、植被、河流、道路和山脉。建筑面积包括古代建筑和现代建筑的总面积。根据建筑物与行政区划间的空间位置关系对这两种建筑物类型进一步分类。

表3 研究地点目标景观的面积统计(单位:公顷)
利用欧几里得距离定量描述了景观之间的相对空间分布,该距离是根据空间坐标计算得到的,古村落及其古老建筑遵循一定的分布模式。古村落分布不均匀,主要分布在沿河,五面山环抱。超过50%的古建筑(70.8%)分布在距河149 ~236 m 的距离内,而距离河不到93 m 的建筑很少。此外,大多数古建筑距离六座山至少有100 m 距离。在村子里,古建筑和祠堂的空间布局遵循一定规则,在113 座古建筑中,有86座(占76.1%)集中在距祠堂40 ~148 米的地方。
6 结论
研究将低空多光谱遥感技术应用于古村落的空间格局监测与分析,在数据采集中部署了具有定制多光谱传感器的无人机系统。然后,设计了分级分类方案,将整个区域分为五个主要景观要素。为提取景观元素,构建了带有机器学习分类器的面向对象分类模型,并使用交叉验证进行评估。利用地理空间数据进行定量分析,揭示了目标景观的空间格局特征和分布差异,有助于进一步研究古村落的选址和建筑功能的变化。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
北京航空航天大学学报(2022年8期)2022-08-31
黑龙江大学自然科学学报(2022年1期)2022-03-29
建材发展导向(2021年7期)2021-07-16
学生天地(2020年31期)2020-06-01
视野(2018年18期)2018-09-26
西江月(2018年5期)2018-06-08
炎黄地理(2017年10期)2018-01-31
浙江林业(2017年8期)2017-11-13
食品工业科技(2014年23期)2014-03-11
