基于全自动驾驶地铁车辆的运营功能需求初步分析
2021-03-24 13:35黎锦弘
科学与生活 2021年29期
黎锦弘
摘要:本文主要分析了全自动驾驶地铁车辆相关内容,其次阐述了以此为支撑的运营功能需求,通过相关分析希望进一步提高地铁车辆运营管控水平,仅供参考。
关键词:全自动驾驶;地铁车辆;運营功能;需求分析
1全自动驾驶地铁车辆内容
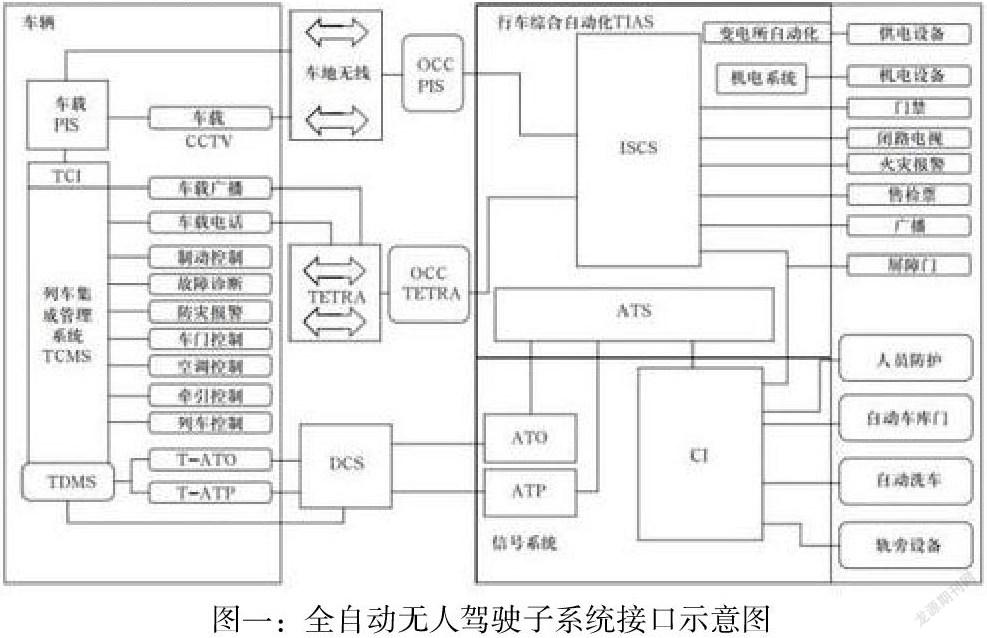
传统驾驶形式都是以人工驾驶车辆为主,主要就是指地铁车辆上的电、气动、运行、停车等都是由司机操作,或是参与完成,具有效率低的特征。通过将全自动驾驶车辆与人工驾驶车辆这两种形式进行对比,可知存在较为显著的差异,具体表现为全自动驾驶形式,能够满足在没有司机参与的状况下,在地面控制中心的统一控制下进行全自动运营,在图一中将各个子系统的接口展现出来。基于此,对于司机而言,只有在系统出现故障,或是运营临时需求时会从临近车站,进入到地铁车辆中,这样就能够通过转换地铁车辆驾驶模式的方式,完成人工驾驶过程中的各项操作。此外,如果将全自动驾驶车辆在运营中的功能需求作为依据,可以具体划分为列车唤醒、列车自检、列车运行、列车蠕动运行等多个不同阶段,明确各个阶段的功能需求,能够在后续更加高效的控制地铁车辆,对于提升地铁车辆运营管控水平具有重要意义。
2全自动驾驶车辆运用功能需求
2.1列车唤醒
对于有人驾驶的地铁车辆而言,司机在实际操作期间,会涉及到地铁列车上的各项内容,如司机需要拧动钥匙开关、启动车载蓄电池、启动车载辅助电源等,完成一系列的启车操作。如果从全自动驾驶地铁车辆的角度进行分析,就会发现列车启动都是由地面控制中心,对相应设备投入运营的列车,发出唤醒信号,之后再由列车完成唤醒功能。
(1)细致分析地铁列车唤醒前状态。
比如:在车载蓄电池的输出开关处于“关断”状态时,地铁列车就会处于“断电”状态,那么对于地铁列车各个子系统而言,都没有电源供电,甚至信号的子系统也处于此种状态。在车载蓄电池的输出开关处于“闭合”状态时,地铁列车就会进入到“休眠”状态,此时地铁列车只有信号系统的车载唤醒模块,会处在“激活”状态。在此之后,地铁列车的车站信号系统,随时都要等待唤醒模块发出相应的唤醒指令。
(2)列车上电分析要点。
比如:地铁列车在网压750V上电之后,地铁列车就会在网络的辅助下,将发电机的具体工作状态发送出来。如果在经过一定时间之后仍然没能上电,车载信号设备就会给地铁列车发出“休眠”指令。在此种状况下,就可以将唤醒模块和车载通信的电源保留下来,同时也要保证欠压保护信号通知休眠唤醒模块,这样就能够将相应的指令上传到控制中心报警。
在TCMS控制列车在实际控制地铁列车双压机同时运行期间,一旦发现任何一个空压机没有处于正常运行状态,就要在网络中上传中心空压机发生故障的各项信息[1]。如果发现地铁车辆在车库内,甚至也不允许出车,那么就可以判定中心唤醒处于“失败”状态,此时地铁车辆调度就可以根据具体状况,查找与故障相关的各项信息。如果在正线上,就要及时退出运营,否则就会对地铁列车唤醒上电造成影响。
2.2地铁列车自检
(1)地铁车载信号设备自检。
以全自动驾驶形式为基础依据的地铁车俩运用管控系统,在进行自检期间,主要就是自动检查信号车载设备、车辆车载设备;在完成自检工作之后,该系统还可以向行车综合自动化系统反馈相应的自检信息,对于保证地铁车俩长期安全稳定运行具有重要意义。
一是信号设备自检。
在落实这项自检工作期间,非常关键的一项操作,就是保证信号车载设备,科学合理的设定读取地铁车辆车载设备自检信息的读取时间。如果系统没能精准的读取出自检状态报告中的各项信息,系统就会自动认定地铁车辆自检处于失败状态。信号设备自检系统在实际运行期间,主要负责的内容就是将自检信息、地铁车辆各个系统的自检信息等,按照前期设定好的标准步骤上传到自动化控制中心。
(2)激活地铁车辆驾驶端。
在完成信号车载设备自检工作之后,才可以激活驾驶端。
信号给车辆激活端全自动驾驶FAM模式和方向,同时也要适当的缓解ATP输出的紧急状态。对于地铁车辆而言,可以通过激活端的方向、模式信号等方式,达到为地铁车辆施加紧急制动的目的;地铁车辆通过激活端方向、三轨高压供电等形式,根据需求闭合高速断路器;预充电接触器自动闭合之后,向信号反馈牵引逆变器中间电压数值,之后地铁车辆就会处于“保持制动”状态。除此之外,考虑牵引系统发生故障,会断开高速断路器,这样将无法自动复位,为了能够有效处理这项问题,中心远程就要充分利用网络系统,做好人工复位这项工作。
(3)地铁车辆车载设备自检。
主要就是自检地铁车辆上电状况,在完成这项自检工作之后,就会向行车综合自动化系统TIAS反馈自检之后获取的各项信息。实际上,自检系统内容较多,如TCMS系统、地铁列车网络通信、空压机、牵引系统、制动系统、空调通风系统等都包括在内,不同的自检系统,具有不同的自检要点,这是保证地铁车辆车载设备充分发挥运行效应的重要保障。在自检系统过程中,主要就是对各个系统的主分机、控制模板、TCMS的通信状态具有直接关联的各项信息进行检查,之后还要第一时间将具体的结果上传到TCMS。
二是地铁列车级静态测试。
信号至关重要,能够向地铁列车发送列车级静态测试指令,之后地铁列车就可以按照信号实际发送的测试指令,进行相应测试,甚至也能够反馈测试结果状态;对于信号而言,还会将最终的测试结果状态,有效的上传到控制中心和TCMS中[2]。在开展下述的这些测试工作期间,ATP就会输出“牵引切除指令”,同时也要精准掌握地铁列车自检内容,如列车开关车门、制动各级位施加以及缓解测试、广播系统报音测试等都包括在内。此外,最终的测试结果,一般状况下也是由信号写入测试端口,之后再通知TCMS。
三是地铁车辆动态自检测试。
在完成地铁车辆静态测试之后,需要保证测试结果处于正常状态,并且也要在待命状态之前,对地铁列车进行动态自检测试。例如:在列检库停车位,分别作向前和向后的跳跃指令,并且车辆反馈牵引、制动结果状态也要给出车载信号,主要目的就是精准判断地铁车辆是否能够通过动态测试。对于ATP而言,需要防护跳跃距离。此种类型的测试,只能在停车库这一环境操作。如果最终的自检结果处于正常状态,可以在TCMS的辅助下,上传给车载信号系统自检结果,之后再由信号系统将自检结果,发动到控制中心。在完成这些操作之后,控制中心就要结合车辆自检结果,授权地铁车辆处于“准备出发”状态,否则地铁车辆就会处于“故障备用”状态。
2.3地铁列车正线和蠕动运行
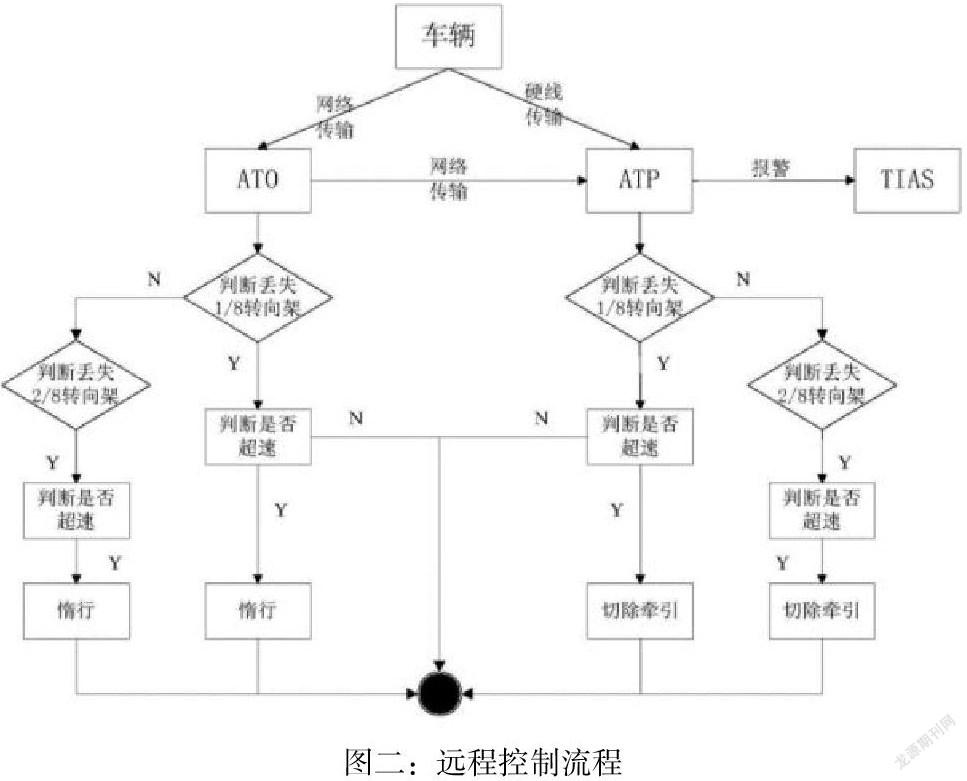
信号系统充分发挥作用,将“正线服务”工况这一指令传送给地铁车辆,之后再由车辆控制其他车载系统,从而保证进入到服务状态,在图二中将车辆控制流程精准展现出来。
如果想要保证地铁车辆处于蠕动运行状态,就要及时启动蠕动模式条件;确认实际需要进行车调度状况;将25Km/h作为最高上限的行驶速度,同时也要实施ATP做好超速保护;保证车载信号是通过硬线将蠕动模式信号,精准的传输给地铁车辆。
结束语:
总之,我国整体科学技术水平显著提升,在开展地铁运营管控工作时,更加注重应用全自动驾驶模式,其与人工驾驶地铁列车模式进行对比,具有诸多优势。为了能够提升地铁列车全自动运营管控水平,最为基础的一项工作就是对全自动驾驶车辆,在运营中的功能需求进行初步分析。一般都是按照运营阶段进行分析,确定具有针对性的方案,从而保证地铁列车各个子系统长期处于安全稳定运行状态。
参考文献:
[1]宋大治,张海桃,陈敦惠,等. 全自动无人驾驶对综合监控系统的需求研究[J]. 交通世界(下旬刊),2021(7):1-3.
[2]范晓栋. 城市轨道交通全自动驾驶车辆在线监测平台的设计与应用[J]. 智能城市,2019,5(11):3-5.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年10期)2022-06-09
小猕猴智力画刊(2022年4期)2022-05-25
锦州医科大学报(2022年2期)2022-05-07
阅读(低年级)(2019年10期)2019-12-14
故事大王(2019年4期)2019-05-14
小猕猴智力画刊(2019年4期)2019-05-08
故事作文·高年级(2019年3期)2019-03-18
宠物世界·狗迷(2017年7期)2018-01-23
现代兵器(2017年4期)2017-06-02