工业自动化生产线中机器人及PLC的集成控制策略
2021-03-24 22:34刘新海
科学与生活 2021年29期


摘要:当前工业技术的不断更新迭代,促使工业生产也更加趋向自动化的发展模式,目前在国内很多生产型企业为了提升生产效率保障生产质量,引入了自动生产线,通过机器人设备来提升生产过程中的产品质量稳定性和效率。而PLC集成控制技术的应用,将其与机器人技术应用结合在一起,不仅能够更高地提升机器人生产的效率和质量而且能够更好地提升工业自动化的水平。本文针对PLC的集成控制以及工业自动化生产线中机器人的应用进行阐述,就其发展趋势以及系统进行分析,从而更加有效地对工业自动化过程中机器人的应用水平的提升。
关键词:工业自动化;生产线;PLC;集成控制
引言:
PLC技术在实际应用中具有一定的灵活性并且能够适应很多应用场景。具体应用过程中编程相对简单,能够有效提升工业控制技术应用的可靠性。而且在具体应用过程中可以和机械、网络等不同应用领域相互结合,展现出极大的适用性。而在现代化的工业发展领域,PLC控制技术的应用更多地出现在工业化的生产过程中,为机电一体化、智能化以及自动化的发展提供更大的助力。作为相关技术人员需要不断地去探索工业自动化生产线中机器人以及PLC集成控制的技术应用,能够使目前的生产技术应用变得更加多样且提升应用范围,从而使其能够更好地为我国的工业化发展提供技术支持。
一、以PLC集成控制为主的机器人系统应用
PLC在现代化的工业生产中发挥着非常重要的作用,它充分地与工业机器人相互结合成为工业生产线上的一个重要构成。工业机器人通过简单易操作的编程来达到重复的运动,从而能够循环地完成一系列的操作。而结合了PLC控制技术的机器人和设备则能够使其控制系统的应用水平得到提升,更好地提升系统性能和整体的操控能力,并提升了网络化的通信水平[1]。当然,工业生产线上根据实际的工业生产需求会设置多个机器人的岗位,这些机器人通过软件程序设置来完成特定的动作,从而实现生产线流水化作业。而利用PLC控制技术将这些机器人通过网络连接在一起,将单一的作业单元连接成为整体的、程序化的作业整体,可以实现对机器人的集成化的管理控制目标,如此一来也形成了一套自动化的工业生产线流程,能够有效地提升工业生产的效率和质量,对于后续实现机电一体化的发展提供更多的助力。
二、关于PLC在机器人工业生产线控制系统中的具体应用
(一)集成控制技术的设计理念
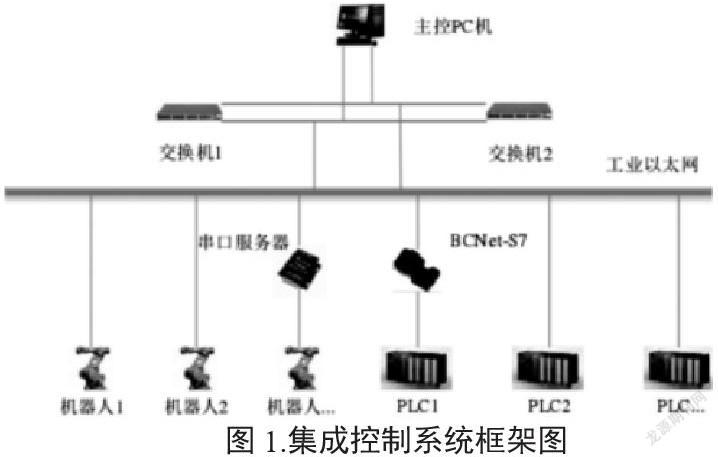
工业生产线能够实现集成化的控制主要是通过两种方式,第一种是借助设备的集成化来实现集成控制,另外一种则是借助信息的集成化来实现的。前一种模式是针对不同功能的设备借助网络的方式来形成一个统一关联且又独立操作的生产线整体,它能够实现工业生产线上对于不同产品的加工需求。而信息集成化的设备则是利用不同的功能模块经过对操作的要求,依照特定流程进行规划和配置,让设备中的各个模块之间实现关联,并结合设定的模式以及相关策略来实现对应的生产活动[2]。PLC集成控制技术与机器人直接进行联动配合是工业自动化生产过程中的重要构成部分。在PLC集成技术的作用下能够更好地实现联动协同工作,并能够去完成更加复杂化的生产内容。可以利用以太网作为工业机器人以及PLC的通讯过程中的组网,将原本设备中不能支持以太网进行通讯的结构进行调换,使其转化成RJ45接口,并在通讯的回路中加入交换机,这样能够更好地便于整个系统运行的稳定性,提高集成控制系统的运行可靠性。关于集成控制系统的设计框架可以参考图1.
(二)PLC的应用原理
从采用PLC集成控制技术的角度来说,对生产线上工业机器人进行控制其主要控制内容包括生产线的运输以及对货物的装配。那么机器人在操作方面就必须采取一系列的复杂操作才能够满足生产线的作业要求,比如对货物的搬运、抓取、检测等各项具体的工作。每一项动作要求都会涉及很多的操作指令,而结合了PLC技术的应用能够更好地实现对机器人的集成化管控和操作,提升设备系统的整体性能。在这里集成控制系统的主要应用原理表现在:系统中将PLC作为工业生产线中的主要核心控制器,然后借助传感器以及操控面板来进行相关指令的传输和下达,结合实际需求对系统中的不同指令进行设计,然后再结合传感器来实现对设备的有效控制,确保设备的运行符合预期。在这里主要是结合PLC对于气缸的驱动作用,设备中的电磁阀在接收到PLC所传输的指令之后,可以通过吸合与释放气缸的方式来实现对相关部件的控制[3]。而PLC在整个过程中则是通过接收和发出信号的方式来实现对设备的控制,进而达到工业生产线的作业目标。
(三)PLC的集成控制通信方案
PLC的硬件构成较为简单,主要有电源、输入/输出单元、中央处理器、存储设备以及外部接口和扩展口等几个方面,具体的结构构成可见图2.
在运行过程中PLC系统在执行程序的过程中是保持着不断地循环扫描,每一个扫描周期就会被称为一个工作周期。在这个周期内分别又依照不同阶段划分为不同的内容,包括内部处理、通信处理、输入扫描、执行用户程序以及输出处理这个五个不同的阶段,由此在系统执行的过程中,生產线的流程会结合性地进行推进。
(四)生产线机器人的设计
1.升降结构设计
在对生产线机器人进行设计时,升降功能是必不可少的一个环节,所以在设计过程中必须充分考虑到垂直方向的支架的支撑力以及对应的作业需求,确保机器人在工作过程中的定位精准。一般情况下升降设备是由气压缸、活塞缸、活塞等构件构成的。活塞在活塞缸的作用下来实现垂直方向的动作,而气缸则是驱动这个机械臂的构件,通过相互配合来实现机器臂对整体装配运动的控制[4]。
2.机器人手臂
为了确保机器人手臂的灵活性会在设备上面设置气缸、齿轮、活塞以及传感器等构件,以确保其能够依照设计要求完成相应的动作。尤其是旋转结构是机器人在设计过程中必不可少的一个环节,它能够保障机器人处于一个正常运动的状态中。为了满足设备旋转过程中的灵活度设计时采用了齿轮、齿条以及活塞等配件,以确保在PLC的控制下能够更加灵活。旋转编码器是确保机械臂在旋转过程中精度控制时的重要装备,通常会采用9000线以上的高分辨率的编码器。
3.传感器
为了能够满足不同的使用需求所以传感器在设置过程中会选择多种类型的接收方式,因此其所能接收的数据种类也因此变得更多。目前主要分为动力传感器、视觉传感器以及激光传感器等。结合了PLC集成控制系统,能够更好地对生产线上的产品信息进行采集,以此来实现工业生产线在生产过程中的自动化定位、追踪、生产信息查询等功能,从而为设备在开展作业以及不同类型的作业需求提供可能性。
4.手抓结构
手抓结构是确保整个生产线上机器人完成相关指令的重要构成也是整个系统设计中的重要内容。机械臂在两位电磁阀的作用下来实现抓取和松开这两个动作。整个动作的启动和完成都需要依靠压缩空气作为动力源,然后在电磁阀对气缸作用下来实现对物体的抓起和松开。在整个过程中,接入电的电磁阀会将压缩空气压缩到气缸中,然后带动对应的活塞来进行对应的动作,推動齿轮来完成机械臂的手部抓取作业。
(五)PLC
在目前开展的自动化工业生产线中结合了PLC集成控制系统的机器人多为ABB、Kuka、Fanuc、安川等主流机型。在对机器人的操作进行控制时一般会分成两个层级,第一级主要是针对网络通信的相关工作内容。而第二级则是负责工厂现场总线的通信技术需求。两级通信技术的应用能够让我们在生产作业线的控制变得更加灵活且便利。可以通过实现机器人设备之间的通信,继而完成对机器人设备的同步控制从而进一步提升整个工业生产线上机器人的作业精准度。为提升生产效率以及生产质量提供基础。
1.在PLC集成控制下的机器人应用
结合了PLC集成控制的机器人系统主要设置了PLC主控单元、数据传输系统以及和机器人相对应的输送单元和立体仓库单元等内容[5]。PLC控制系统的作用就是来读取控制系统中的对应信息,然后向下或向上发出信息用于发送或是接收,从而形成能够控制各个执行模块的指令;装配在生产线中的数据传输系统可以读取近4cm的工件信息;此时输送信道则被分为环形或是直线型两种,分别输送交流和直流调速系统;立体仓库被划分为9个仓位,在实际应用过程中会结合对应的组件信息来调配仓库的具体位置。在PLC集成控制下的工程生产线上的机器人能够实现的最大目标就是将手动操作与连续性操作结合在一起。通过软硬件的提升,实现了输出与输入目标的一致性,继而能够对机器人进行更优化的控制。同时利用传感器来实时进行定位追踪,以提升机器人手臂作业的精准性。
2.软件设计
在进行软件设计的过程中需要结合生产线需求,对PLC集成控制进行合理的设计,从而能够满足整个生产线的流程化作业。
在进行整体流程设计时,传感器会接收到PLC所发送的指令,这时工件库会结合指令要求向传送带依照顺序推送配件,为后续的工作做准备。系统中的RFID检测环节对工件信息进行核对,符合设定要求的工件会传输到对应的位置并进行下一步的工序操作。而不符合的工件则会依照指令传回到相应的位置。此时仓库料的占位信息会随着工件的改变而改变并将相关信息传输到另外一个机器人,另外一个机器人会结合工序流程开展对应的作业,从而逐步形成一套完整的生产线流程。在程序设计的过程中,PLC会直接对机器人的模块功能进行控制,来逐步实现对整个机器人生产线的控制,使控制系统变得更加的智能化[6]。关于集成化控制生产线上机器人的通信设计规格主要可参考下表1.
结束语
结合上文所阐述的相关内容我们可以看出,PLC技术在具体应用过程中能够使原本工业流水线上的机器人设备在控制方面变得更加集成化、自动化以及智能化。有效地提升了生产的质量和效率。在使用PLC控制工业生产线上的机器人时,要明确机器人自身的功能和可操作的范围,从而能够结合生产线的工序以及自身结构和PLC集成控制系统来对其进行合理化的设计,从而让整个生产线的作业效率和精度变得更加优化,实现工业生产过程中的自动化、现代化以及工业发展数字化的目标实现。
参考文献
[1]何乙琦.PLC控制技术在工业自动化中的应用策略[J].信息记录材料,2021,22(09):179-180.
[2]李纯.自动化生产线中的机器人PLC控制技术[J].电子技术,2021,50(04):96-97.
[3]赵少君,林雁飞.工业机器人在数控加工中应用[J].科学技术创新,2020(33):81-82.
[4]高星.自动生产线PLC联合工业机器人控制设计[J].装备制造技术,2020(10):122-123+132.
[5]高帆,金烨.基于工业机器人的指尖陀螺组装自动化生产线设计研究[J].机器人技术与应用,2020(04):31-34.
[6]彭瑜.提高能效的工业自动化途径和方法[J].自动化博览,2011,28(S1):6-11.
简介:刘新海 南京大地水刀股份有限公司 男,1975年10月,盐城市人 现为中级工程师,研究方向为:机械工程自动化
猜你喜欢
中国计算机报(2020年11期)2020-04-21
佛山陶瓷(2017年5期)2017-06-05
中国新通信(2016年21期)2017-01-06
科技创新与应用(2016年34期)2016-12-23
新教育时代·教师版(2016年26期)2016-12-06
科技视界(2016年12期)2016-05-25
中国纤检(2015年22期)2016-01-18