基于无人机红外遥感和边缘检测技术的采动地裂缝辨识
2021-03-24 01:26赵毅鑫姜耀东
煤炭学报 2021年2期
赵毅鑫,许 多,孙 波,姜耀东,张 村,何 祥
(1.中国矿业大学(北京) 共伴生能源精准开采北京市重点实验室,北京 100083; 2.中国矿业大学(北京) 能源与矿业学院,北京 100083; 3.中国矿业大学(北京) 力学与建筑工程学院,北京 100083)
我国西部地区大多属于干旱半干旱地区[1],长期处于水资源短缺、土地荒漠化的威胁之下。同时,西部地区是我国主要的产煤地区,根据国家统计局2019年数据,内蒙古、山西、陕西和新疆4地的原煤产量占全国原煤总产量的75%左右。西部矿区煤炭资源赋存普遍具有埋藏浅、厚度大、基岩薄和松散层厚的特点[2-3],煤炭开采条件优越。多数矿井采用大采高、放顶煤等采煤工艺,具有明显的高产、高效和高强度开采特点,地下开采引起的地表沉陷和地裂缝次生灾害尤为严重[4-7]。地表沉陷和地裂缝不但造成地面房屋开裂倒塌,导致经济损失,甚至诱发采空区遗煤自燃及煤田火灾[8-10]。因此,快速、及时、准确获取地裂缝信息,不仅可对上覆岩层运移规律分析提供数据支撑,而且可为煤矿安全生产和矿区环境综合治理提供支撑。
目前,国内外学者使用多种方法对地裂缝进行实地监测研究,如野外调查、GPS或GNSS等卫星定位技术[11-13]、合成孔径雷达干涉测量技术(InSAR)[14-15]、激光扫描技术[13,15-16]和遥感技术[11,13,17-19]等。虽然野外调查和GPS卫星定位技术精度较高,但劳动强度大,成本较高[20]。InSAR技术易受时间失相干、空间失相干等因素的影响,当地面变形量过大时易出现相位解缠困难或相位失相关[13]。激光扫描技术要求扫描仪与目标之间的通视,其扫描范围受地形条件限制。高精度的扫描仪价格昂贵,监测成本相对较高。卫星遥感技术通过对地面遥感影像的解译获取地裂缝的分布,但其分辨率往往不足以识别小型裂缝[20]。无人机遥感技术具有分辨率高、机动灵活、效率高、运行成本低等显著优势[21-22],但目前在地裂缝识别方面取得应用的多为可见光相机,易受云雾等天气因素影响,且不能全天候监测。红外线的波长大于可见光,其穿透性较可见光更强,受外部环境的影响较小[23]。红外相机对具有明显红外热特性的物体和区域敏感,具有较好的目标探测能力[23-24]。自然界一切温度高于绝对零度的物体都能发射红外辐射,且物体温度越高,其红外辐射强度往往越强。地裂缝处的空气受地底深处相对恒温且潮湿的条件影响,其温度与地表的温度之间具有明显差异,从而可被红外相机识别。BARO等[25]使用无人机和红外热像仪对岩石边坡和悬崖上的开放型地表裂隙进行了观测,但对煤矿开采导致的地裂缝红外辨识研究仍鲜有报道。
无人机红外图像精准辨识需要依靠图像边缘检测等技术,该技术是数字图像处理、模式识别、计算视觉的重要基础。边缘是图像最基本的特征,它包含了图像中目标的骨架信息。准确的边缘信息为后续更高层次的目标识别、特征描述等提供依据。近年来,图像的边缘检测技术已被学者广泛应用于图像分割[26-27]、运动检测[28]、人脸识别[29]和目标跟踪[30]等领域。典型的图像边缘检测方法主要有Roberts算子[31]、Sobel算子[32]、Prewitt算子[33]、Canny算子[34]、Laplacian算子[35]、拉普拉斯高斯算子(LoG)[36]、基于数学形态学的边缘检测[37-39]、小波变换和小波包变换的边缘检测法[40-43]、蚁群理论的检测方法[44]等。目前,基于边缘检测方法的裂缝检测主要应用于公路裂缝检测及混凝土裂隙检测。如ABDEL等[45]采用边缘检测方法识别和检测桥梁的裂隙。OLIVEIRA等[46]提出了一种用于裂缝自动检测和表征的集成系统,用于检测道路路面裂缝。而将边缘检测方法和红外热像结合,应用于检测采矿诱发地裂缝的研究仍较少。
笔者使用无人机搭载高清红外相机对内蒙古自治区鄂尔多斯市上湾煤矿12401工作面上方地裂缝发育区域进行针对性、全天候监测,获取了12个不同时刻红外图像数据。在前人研究的基础上,筛选并优化了地裂缝提取算法,并对不同时刻红外图像内不同地物类型的温度信息进行统计和分析,对不同时刻地裂缝提取结果进行对比,旨在找出在特定条件下无人机红外遥感技术对煤矿塌陷区地裂缝识别的最佳时间窗口,为煤矿塌陷区大面积地裂缝无人机快速识别和治理奠定基础。
1 地裂缝监测试验
1.1 工程背景
通过无人机搭载红外相机监测体系对神东矿区上湾煤矿12401大采高工作面地裂缝进行监测,观测区位置如图1所示。该煤矿位于内蒙古自治区鄂尔多斯市东部,其地形特征呈西北高、东南低的斜坡状。
上湾煤矿采用大采高长壁开采方法。12401综采工作面是12煤四盘区首采面,东侧为尚未圈定的12402综采工作面;南侧为井田边界;西侧为规划设计的12412综采工作面,尚未开始掘进;北侧为井田边界,与补连塔井田相邻。综采工作面沿倾向布置,走向长度299.2 m,推进长度5 254.8 m,采高8.8 m,该综采工作面地面标高为1 188~1 300 m,煤层底板标高为1 043~1 066 m,12401工作面井上下对照图及钻孔柱状图如图1所示。
1.2 监测设备
为实现地裂缝可见光及红外观测,采用大疆无人机(M600Pro)、高清红外相机(Tau2-640R)以及可见光相机(ZENMUSE Z3),设备具体参数见表1。其中,高清红外相机用于采集地表沙子、植被和地裂缝等目标的热辐射信息;Z3可见光相机则用于采集高分辨率地裂缝图像,以对比验证红外监测地裂缝结果。
1.3 监测方案
为获得地裂缝最佳观测图像,采用无人机搭载高清红外相机在全天不同时间点(1:00,3:00,5:00,7:00,9:00,11:00,13:00,15:00,17:00,19:00,21:00,23:00,时间间隔2 h)对地表某一固定裂缝区域进行12次观测,观测时拍摄高度15 m,观测季节为春季。目标观测区选择在工作面推进238 m处正上方地表,采用石灰绘制边界的正方形区域。该区域中有一条约3 m长的主裂缝F1,还有数条短而不连续的裂缝。为检验红外图像精度,每次航拍前10 min,人工测量沙子表面的温度并取平均值,记录每次测量时风速大小。

表1 监测设备参数Table 1 Technical parameters of UAV,infrared imager and visible light image
采用无人机搭载高精度可见光相机采集目标观测区的可见光图像作为红外图像的参考,采集时间为7:00 am,如图2所示(分辨率为0.3 cm/像素)。为核验可见光图像精度,在同一高度(15 m)对地表一直径18 cm的圆形卷尺外壳进行可见光图像采集,结果如图3所示(分辨率为0.32 cm/像素)。图2中裂缝F1最大实测宽度为12.5 cm,通过统计图2中裂缝F1最宽处的像素数目,计算其最大宽度并与实测值进行对比;同时统计图3中卷尺外壳横向、纵向直径的像素数目,得出其计算长度与实际直径长度进行对比,以评价可见光图像的精度和可靠性。
2 地裂缝监测结果及分析
2.1 不同时间点地裂缝红外图像特征
使用专业软件ViewSeri2.3.1从12个不同监测时刻所采集的图像序列中,分别选取12个时刻的目标观测区红外图像,使其具有大致相同的方向和分辨率,选取的红外图像如图4所示。图4中黑色方块是预先放置的尺寸参照物,其大小为45 cm×45 cm。根据图4中尺寸参照物占据的像素数量,计算出各自的分辨率分别为1.55,1.61,1.50,1.50,1.50,1.55,1.50,1.50,1.61,1.50,1.61,1.50 cm/pixel。

图2 7:00目标观测区的可见光图像Fig.2 Visible light image of the target observation area at 7:00

图3 15 m航高下圆形卷尺外壳成像Fig.3 Visible light imaging of a circular tape shell at 15 m height

图4 不同时刻观测区红外图像Fig.4 Infrared images of the target observation area at different times
从1:00~5:00和19:00~23:00,地裂缝和植物呈亮白色,代表其温度较高;而沙子呈黑色,代表温度较低,如图4(a)~(c)和图4(j)~(l)所示。图4(d)~(i)展示了7:00~17:00的观测区地表的红外图像,可以看出地裂缝和沙子的颜色和亮度差异性不明显,即此阶段红外相机对地裂缝的识别效果较差或不能识别。9:00~15:00期间,地裂缝颜色主要为黑色、暗色,亮度较低,沙子的亮度较高,表现出裂缝温度低于沙子的特征,如图4(e)~(h)所示。需要说明,观测区域边界线因使用白石灰圈定,其吸热能力较低,均呈现低温特征。
对比不同时段采集的红外图像发现:3:00~5:00的红外图像更清晰,地裂缝信息更完整。而7:00和17:00的红外图像监测效果最差,地裂缝图像色温非常接近沙子,这使得裂缝很难与周围物体区分。因此,在较大温差下采集图像,可以获得较好的地裂缝监测效果。
2.2 地裂缝辐射温度特征及规律
通过不同时段记录的地表风速和表层沙子温度计算红外图像沙子温度的误差,评估红外图像温度精度,计算结果见表2。

表2 不同时刻风速大小和人工测量温度及其与 图像提取温度的误差Table 2 Wind speeds and manual measured temperatures of surface sand and the errors between them and that extracted from infrared images
图像温度与人工测量温度之间的误差基本呈现随风速增加而增加的趋势。在无风条件下,即5:00和7:00,2者之间误差较小,绝对误差分别为0.14 ℃和0.04 ℃,相对误差为1.82%和0.24%,此时红外图像精度较高;低风条件下(风速≤2.5 m/s),如1:00 am,绝对误差均小于4 ℃,相对误差在10%以下,此时红外图像精度可达1±0.1 ℃;风速较大时,如17:00时,风速为4 m/s,绝对误差和相对误差均较大,此时采集红外图像精度较差。
除地裂缝外,观测区内主要的地物类型为沙子和植被。为消除位置不同造成的轻微温度差异影响,使用专业软件Maxlm DL 5在红外图像内裂缝F1、沙子和植被处分别随机提取30个样本像素,计算这些样本像素的温度平均值,并据此计算裂缝F1和沙子、植被之间的温差,计算结果见表3。

表3 不同时刻裂缝F1、沙子和植被的温度和温差Table 3 Temperature and temperature differences between F1,sand and vegetation at different time
根据表3中数据,1:00~3:00,裂缝F1、沙子和植被的温度变化不明显。而3:00~5:00,裂缝F1、沙子和植被的温度出现了明显的下降,均降至1 d内最低温度值,分别为13.26,8.04,10.95 ℃。7:00以后,由于太阳升起,温度相对前一时刻有明显的升高,且随着太阳辐射强度和太阳高度角的增加,温度持续增加。13:00时,裂缝F1、沙子和植被的温度达到1 d内最大值,分别为43.19,51.33和29.15 ℃。13:00过后,随着太阳高度角和太阳辐射的减小,温度下降。9:00~15:00,裂缝F1的温度介于植被和沙子。直至19:00以后,3者的温度高低顺序变为裂缝F1>植被>沙子,并将持续至第2天上午。这表明裂缝和植被随着外界温度的改变产生的温度变化小,其抵抗温度改变的能力均强于沙子。
图5为不同时刻裂缝F1和沙子、植被的温差。1:00~5:00和21:00~23:00,裂缝F1与沙子的温差在4~6 ℃,裂缝F1与植被的温差在1~4 ℃。这2个时段,裂缝F1与沙子、植被的温差均为正值。7:00~11:00,裂缝F1与沙子、植被的温升速率不同,温差不断增加。13:00~15:00,裂缝F1降温慢,而沙子降温快,温差不断减小。 9:00~15:00,裂缝F1与沙子、植被的温差分别为负值和正值,变化范围较大,最值分别为-12.52和14.04 ℃。7:00,裂缝F1的温度低于沙子、植被,且与沙子、植被的温差较小,地裂缝识别相对较难;而17:00,裂缝F1识别不出来,主要是由于其处在裂缝、沙子、植被温度高低次序交替的时间拐点,3者之间温度基本相同,所以7:00,17:00两个时间点采集的红外图像难以识别地裂缝。

图5 不同时刻裂缝F1和沙子、植被的温差Fig.5 Temperature differences between F1,sand and vegetation at different times
1:00~5:00和19:00~23:00,裂缝F1与沙子、植被的温差小于9:00~15:00,但1:00~5:00和19:00~23:00,红外图像总的温度范围小于9:00~15:00。因此,1:00~5:00和19:00~23:00,红外图像内裂缝F1与沙子、植被仍有足够的对比度。此外,凌晨和夜晚,裂缝F1温度最高,亮度最大,为滤除图像内无关信息,实现地裂缝的检测提供了便利。
2.3 不同时间点地裂缝尺寸特征
根据图2中裂缝F1最大实测宽度和图3中圆形卷尺外壳横向、纵向直径进行可见光图像精度计算,结果见表4。
对图2中尺寸参照物所占像素数目进行统计,计算图2目标观测区可见光图像的分辨率为0.3 cm/像素。对裂缝F1区域横向像素点数目进行统计,其最大宽度处像素点数目为41个,其计算值为12.33 cm,同实际值的误差为-1.36%;对图3中尺寸参照物所占像素数目进行统计,计算图像分辨率为0.32 cm/pixel。卷尺外壳横向、纵向2条直径计算值与实际值相差均不到5%,平均值约为-1.33%。经过上述计算结果,根据15 m航高下采集的可见光图像对裂缝F1的最大宽度和圆形卷尺的直径进行计算,误差大小分别为-1.36%和-1.33%,均小于2.00%,与实际值相差较小。该航高下采集可见光图像的识别精度可达1±0.02 cm,因此可将可见光图像内裂缝F1长度的计算值作为真实长度作为参考评价不同时刻红外图像的识别效果。

表4 可见光图像中卷尺计算直径及其与实际直径的对比Table 4 Comparison between the calculated diameter of the tape in the visible image and its actual diameter
将裂缝视为多条线段首尾搭接而成,运用勾股定理计算每一段线段的长度再累加即可得该条裂缝以像素表示的长度。根据图像的分辨率计算可得裂缝的实际长度。
假设裂缝由n条线段组成,第i条线段占有的像素行数为ri(ri≥0),占用的像素列数为ci(ci≥0),如图6所示,则该条线段的长度li可表示为

(1)
整条裂缝的总长度L为n条线段长度的叠加:
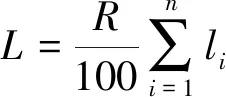
(2)
式中,R为红外图像的分辨率,cm/pixel。
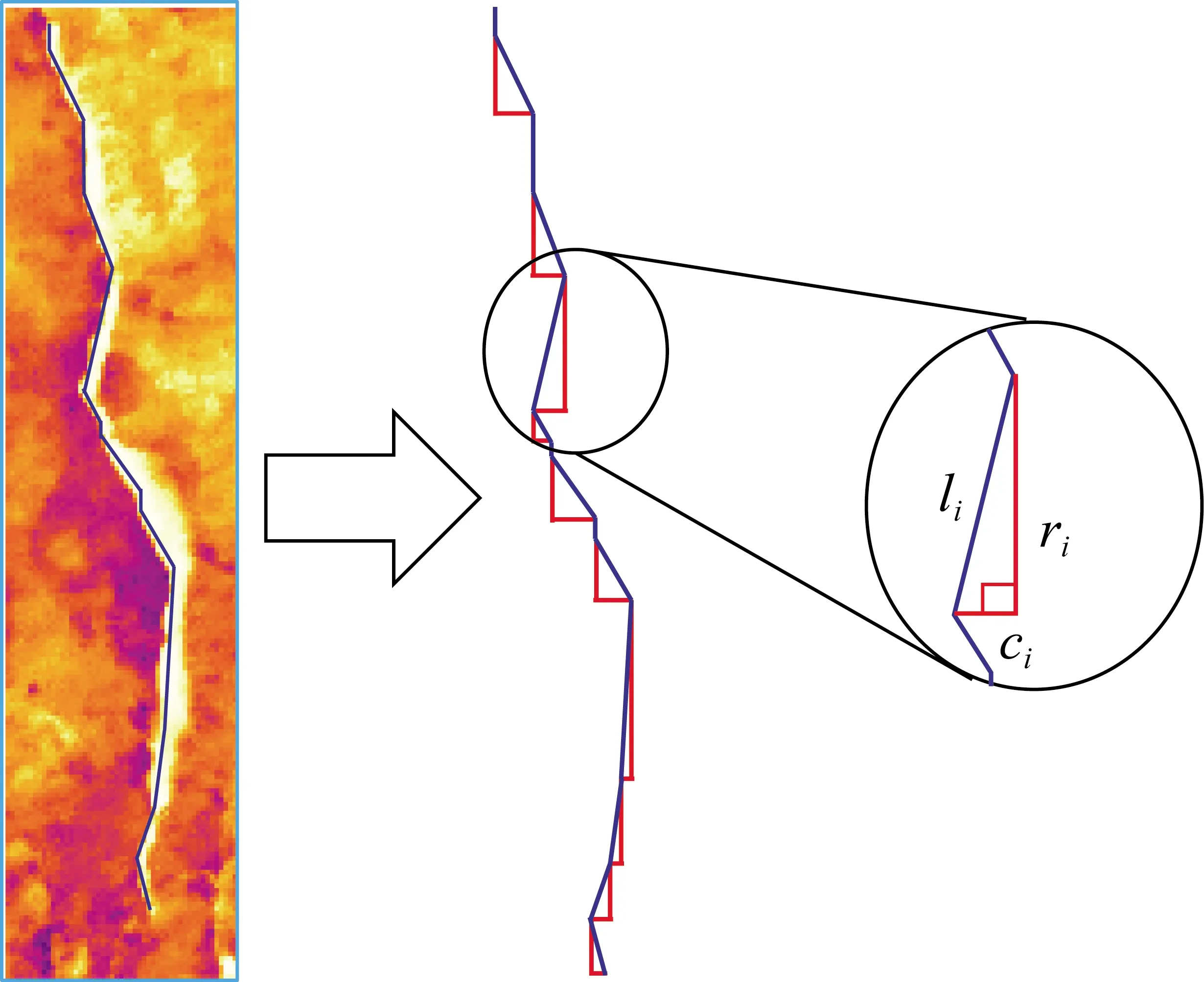
图6 图像中裂缝长度提取方法示意Fig.6 Schematic diagram of the method for extracting fissure length from an image
按上述方法,对7:00采集的可见光图像和12幅不同时刻采集的红外图像中裂缝F1进行长度计算,结果见表5。不同时刻红外图像中裂缝F1计算长度与7:00可见光图像的差值如图7所示。

表5 不同时刻红外图像和7:00获取的可见光 图像中裂缝F1的长度Table 5 Length of F1 in infrared images at different times and the visible image captured at 7:00
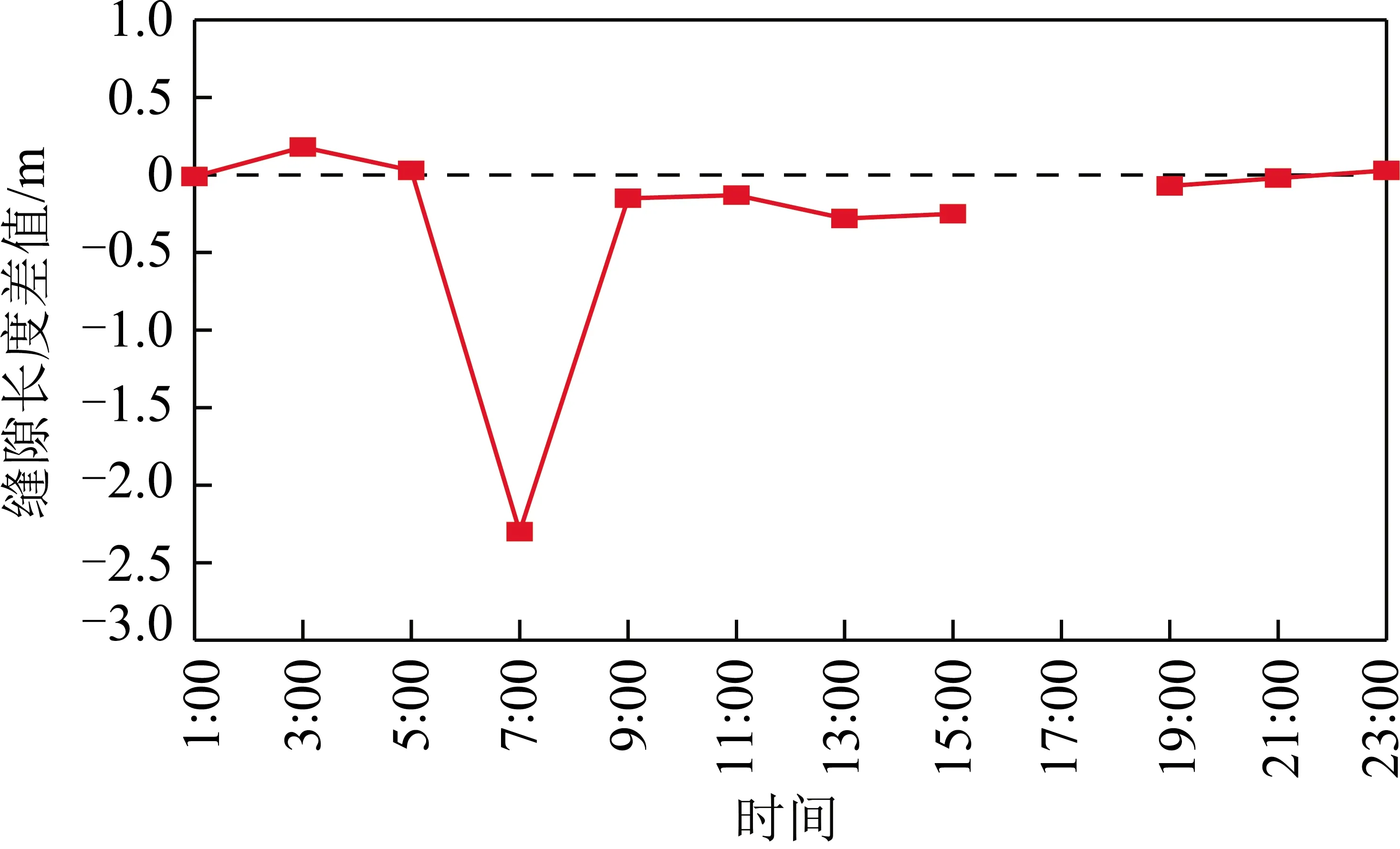
图7 不同时刻红外图像与可见光图像中裂缝F1长度之差Fig.7 Differences in the length of F1 in infrared images at different times and visible image
不同时刻的红外图像中,裂缝F1的长度提取结果见表5。不同时刻红外图像和可见光图像中裂缝长度的差值如图7所示。夜间采集的红外图像提取裂缝F1的长度相比白天要大,而且差值及误差相对较小。其中1:00~5:00,红外图像中提取的裂缝F1长度比其余时间都要长,红外图像和可见光图像中裂缝F1长度差值近似为0或大于0;19:00~23:00,裂缝F1长度的差值为负或近似为0。7:00~15:00,该差值始终小于0,除7:00 am外,平均差值约0.2 m;而7:00裂缝F1长度较小,误差较大。经对比,凌晨1:00~5:00和23:00,由红外图像计算的裂缝长度大于其余时刻;在3:00,5:00和23:00,由红外图像计算的裂缝长度超过了由可见光图像识别的长度。然而,由图4(c)5:00采集的红外图像可知,主裂缝F1右侧存在其他的裂缝,但在23:00采集的红外图像中观测不到。因此,在本研究测试条件下,使用红外相机对地裂缝进行识别的最佳时段为3:00~5:00。
3 地裂缝检测方法改进
3.1 不同边缘检测方法下地裂缝检测
采用MATLAB软件运行多种边缘检测方法,对5:00采集的红外图像进行裂缝边缘检测,红外图像中地裂缝已用红色方框标记,并分别定为Ⅰ组裂缝、Ⅱ组裂缝,如图8所示。为突出地裂缝重点研究区域,图8红外图像已被裁剪。选取的边缘检测方法主要有一阶微分算子法、二阶微分算子法以及作者提出的改进边缘检测方法,其中一阶边缘检测算子有Roberts算子、Sobel算子、Prewitt算子、Canny算子;二阶微分算子有Laplacian算子、LoG算子;其中LoG算子、Canny算子属于典型的最优算子。选取定量评价指标对裂缝边缘检测结果进行评价,给出一种适用于本研究中裂缝边缘检测的方法。
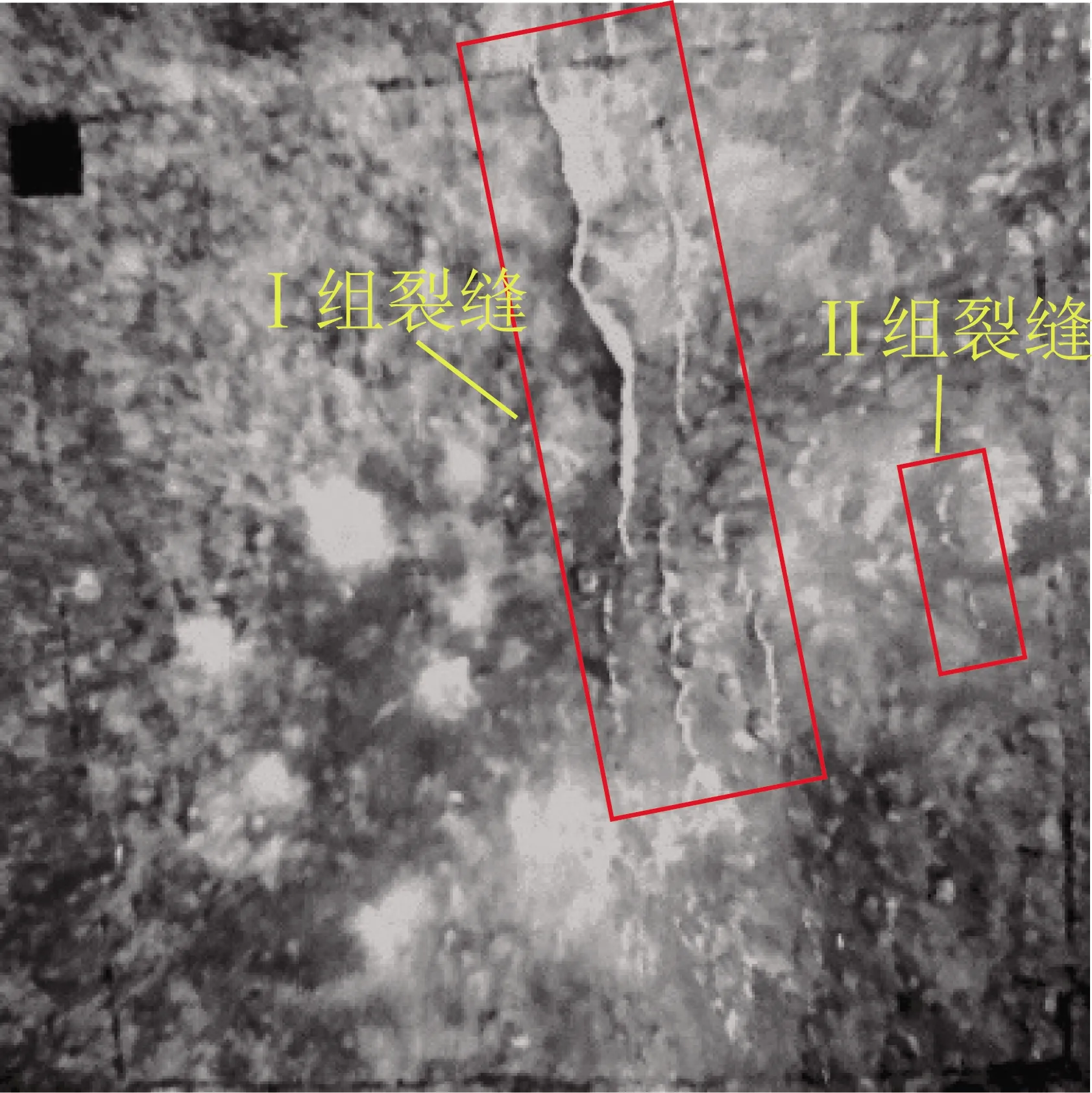
图8 5:00采集的红外图像Fig.8 Infrared image acquired at 5:00
3.1.1一阶微分算子边缘检测
图9为4种一阶微分算子边缘检测方法对图8中地裂缝进行边缘检测后的结果,被检测出的地裂缝已用红色方框进行标记。其中图9(a)为采用Roberts算子进行裂缝检测的结果图像。图中Ⅰ组裂缝和Ⅱ组裂缝边缘均被检测出来,但是边缘不连续,且边缘信息存在丢失情况,未能全部检测出来,特别是Ⅱ组裂缝。由于红外图像背景噪声比较多,裂缝检测图像中产生一些孤立点、伪边缘。图9(b)为Sobel算子进行裂缝检测的结果图像,从边缘检测结果可以看出,裂缝边缘基本能辨识。相比Roberts算子,Sobel算子检测结果受噪声影响较大,检测结果中存在许多伪边缘。图9(c)为Prewitt算子进行裂缝检测的结果图像,从检测图像中可以看出,Prewitt算子裂缝检测结果和Sobel算子检测结果相似,真实边缘信息能够保留,但在滤除伪边缘方面还有所不足,致使边缘检测图像中出现虚假边缘表征。图9(d)为Canny算子对裂缝检测的结果图像。从裂缝检测结果可以看出,Canny算子具有较好的降噪能力,能滤除大多数的虚假边缘,并且检测的图像边缘连续。结果中检测出Ⅰ组裂缝边缘,Ⅱ组裂缝未被辨识。
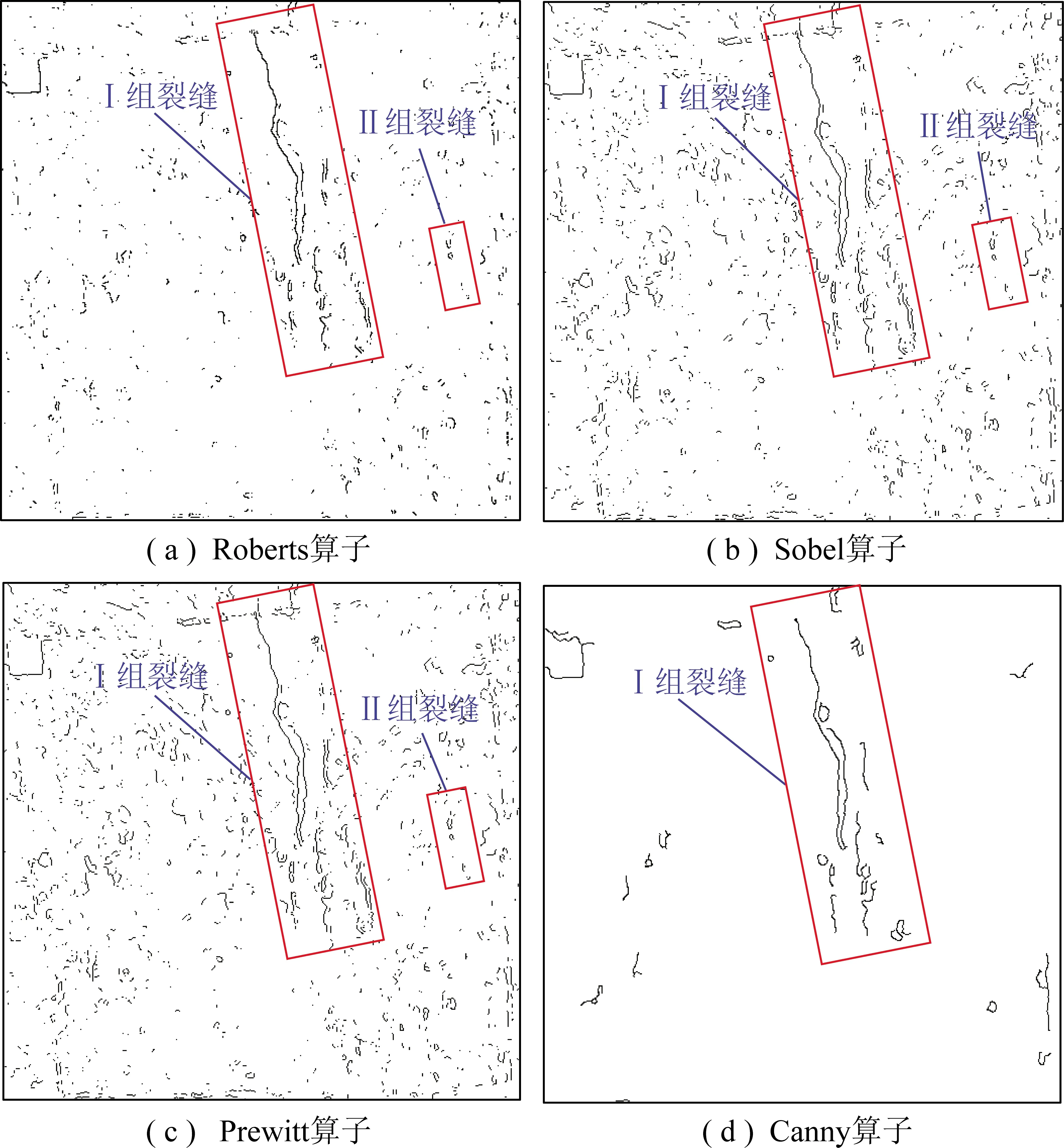
图9 一阶微分算子地裂缝检测结果Fig.9 Results of mining-induced ground fissure detection using first order differential operator
Roberts算子、Sobel算子、Prewitt算子的阈值均是自动选取,Canny算子阈值是人工选取。运行中发现,噪声的抑制和裂缝边缘检测精度是有矛盾的,在本文红外图像边缘检测中表现比较突出。如果选择的阈值过小,结果将会含有大量的伪边缘,如果选择阈值过大,将会丢失很多重要的边缘信息。因此,对于具有复杂噪声的图像,例如本研究中的红外图像,一阶微分算子边缘检测效果并不理想。
3.1.2二阶微分算子边缘检测
图10为2种典型二阶微分算子的边缘检测结果。图10(a)为Laplacian算子对裂缝检测的结果图像。不难发现:Ⅰ组裂缝的边缘能够保留,Ⅱ组裂缝边缘丢失严重,且边缘不连续。Laplacian算子对噪声比较敏感,检测出的图像含有较多的孤立噪声。而且单独使用Laplacian算子进行边缘检测常会产生双像素宽的边缘,因此Laplacian算子直接用作红外图像边缘检测效果不理想。图10(b)为LoG算子对地裂缝检测的结果图像。可以看出,2组裂缝边缘均能够得到较好保留,但边缘不连续。虽然LoG算子比Laplacian算子加入了高斯滤波,但它对噪声仍比较敏感,检测出来的图像含有较多噪声。但相比于一阶边缘检测算子,二阶边缘检测算子的裂缝边缘检测结果更准确,同样对图像中噪声也较敏感[47]。
3.1.3改进边缘检测算法
基于上述分析,笔者提出了一种改进边缘检测算法,将LoG算子、Canny算子及基于数学形态学的边缘检测方法组合使用,并对图8中地裂缝进行检测,检测结果如图11所示。
首先,运用LoG算子对融合图像进行初步边缘检测,由于LoG算子进行裂缝检测过程与人类视觉观察边缘方法相似,且它是二阶边缘检测算子,裂缝边缘检测较准确,因此利用此优点对裂缝进行初始检测。为克服LoG算子裂缝边缘不连续及其对噪声敏感的缺点,利用Canny算子对初始检测的图像进行裂缝再检测。Canny算子具有良好的边缘检测性能,其检测的图像边缘连续、检测精度高而且有更好的抗噪性能。最后,利用数学形态学的闭运算对上述检测后裂缝图像进行后处理。数学形态学是一种非线性滤波方法,其基本运算是腐蚀和膨胀,以及它们的组合开、闭运算。闭运算具有填充物体内细小空洞,连接邻近物体和平滑边界的作用。对裂缝检测后的图像进行闭运算处理,使其邻近裂缝边缘连接起来,以及填充边缘之间的裂缝。
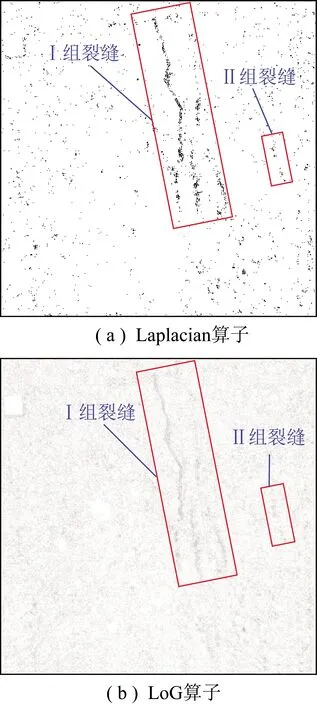
图10 二阶微分算子地裂缝检测结果Fig.10 Results of mining-induced ground fissure detection using second order differential operator
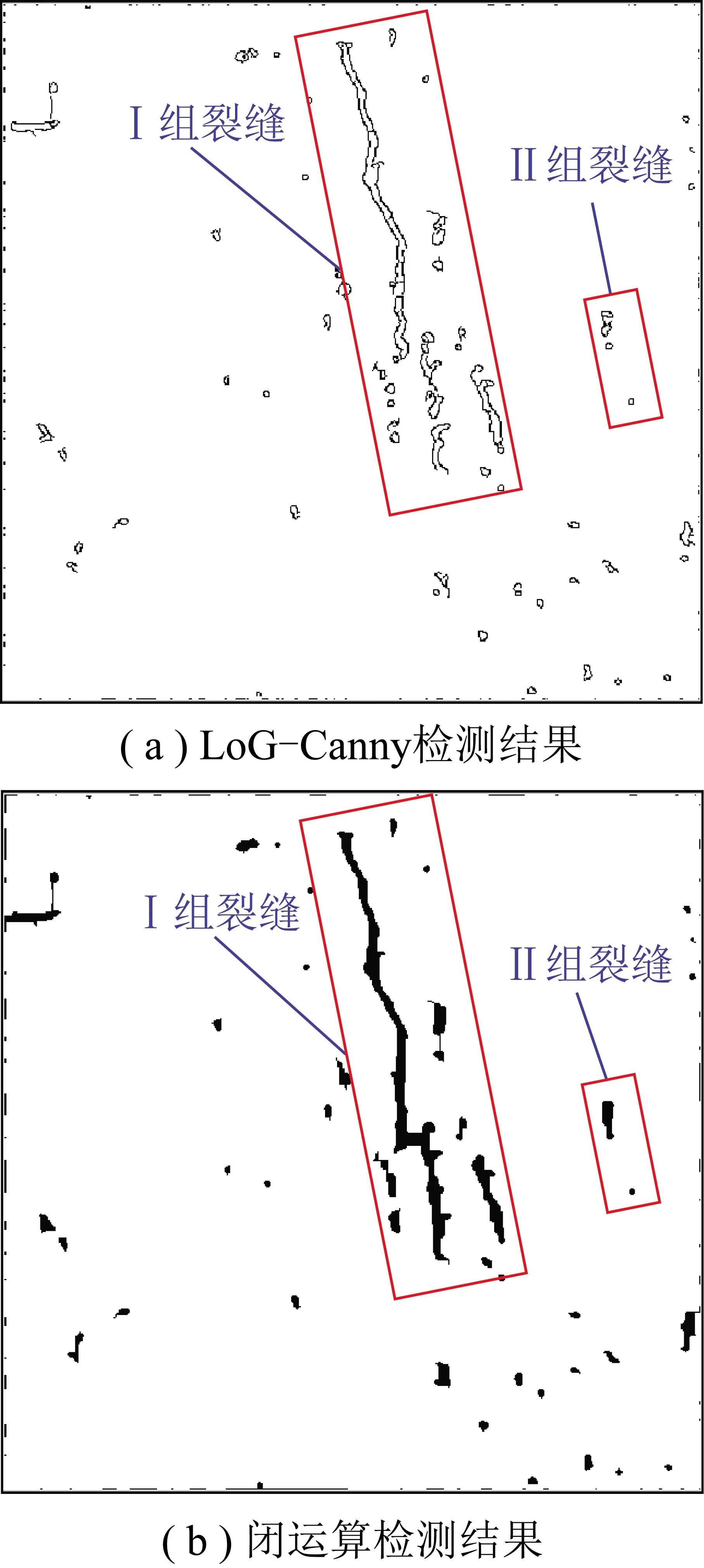
图11 改进边缘检测方法地裂缝检测结果Fig.11 Results of mining-induced ground fissure detection using the improved edge detection method
图11(a)为改进边缘检测方法(未进行闭运算)对裂缝检测的结果图像,从边缘检测图像中可以看出,2组裂缝边缘信息基本得到保留,且该方法对噪声具有良好的抑制作用,伪边缘滤除方面做的比较好,使得裂缝特征视觉上较显著,但局部裂缝不连续。在图11(a)基础上进行闭运算,得到的结果图像如图11(b)所示。可以明显看出,裂缝边缘之间细小空洞已被填充,邻近的裂缝边缘也被连接。因此,针对本文中红外图像,改进后边缘检测方法对裂缝检测效果较好。
3.1.4地裂缝检测定量评价
选择Pratt 品质因数(PFoM)作为定量评价指标,对上述不同边缘检测方法的裂缝检测结果进行评价。PFoM是由PRATT[48]提出,主要体现边缘检测结果和真实边缘的偏差,其公式为

(3)
其中,II和IA分别为理想边缘像素数目和检测到的边缘像素数目;α为常量,设为1/9;d(i)为第i个检测到的边缘像素点到离它最近的真实边缘像素点的距离。PFoM值域为0到1,其越接近1说明边缘检测结果越好。

图12 不同边缘检测方法的PFoM值柱状图Fig.12 Histogram of PFoM for multiple edge detection methods
不同边缘检测方法的PFoM计算结果如图12所示。一阶微分算子中,Roberts算子的PFoM得分为0.354,高于Prewitt算子和Sobel算子,这说明使用Roberts算子进行裂缝检测效果优于Prewitt算子和Sobel算子。Prewitt算子和Sobel算子的PFoM值基本相等,说明Prewitt算子和Sobel算子检测裂缝的结果相似。Canny算子由于其较强边缘检测能力,其PFoM值高于其他一阶边缘检测算子。Laplacian算子、LoG算子边缘检测方法的PFoM分数都比较小,说明二阶微分算子检测得到的结果不佳,不适宜直接用作边缘检测。文中作者所提的改进边缘检测算法的PFoM值为0.571,明显大于其他边缘检测方法的PFoM值,说明该方法优于其他边缘检测方法,具有良好的裂缝检测效果,适宜用于提取本文中红外图像中的地裂缝。
3.2 不同时间点的地裂缝检测
采用改进边缘检测方法,对2.1节所述不同时刻采集的12幅红外图像(图4)进行地裂缝边缘检测(图13),对比分析不同时刻裂缝的边缘检测结果,进一步评价改进边缘检测方法适用性以及对比不同时刻红外图像中地裂缝辨识的难易程度。
由图13可知,除7:00,13:00,15:00及17:00四个时刻外,其他时间点采集的红外图像中的地裂缝均能检测到,并且抑制噪声能力较强,使地裂缝更突出,易被直观辨识,该结果证明改进边缘检测方法对红外图像中地裂缝边缘检测效果较好。

图13 不同时间点采集红外图像中地裂缝检测结果Fig.13 Results of ground fissure detection in infrared images at different time points
通过对比不同时间点边缘检测结果可知,19:00,21:00,23:00,1:00,3:00,5:00,裂缝更易被检测,图像中噪声较少;其中尤以3:00,5:00时,地裂缝检测效果最好,该时间段识别的裂缝边缘最多;而夜间其他时间段的裂缝检测结果中,裂缝边缘相对较少,部分地裂缝丢失。该结果说明夜间裂缝温度高于沙子、植被的温度,且温差相对较大,对比度较好,更易被识别。对9:00,11:00,13:00以及15:00采集的红外图像进行裂缝检测,Ⅰ组裂缝基本被检测到,但存在裂缝长度及数量丢失等情况;其中9:00,11:00时,Ⅰ组裂缝检测效果相对其他白天时间段的边缘检测结果较好,其次13:00,15:00时的图像中裂缝检测结果中噪声较多,主要为植被的边缘,说明此时间段植被温度最低,与Ⅰ组裂缝及沙子的温差较大,植被较突出。而7:00,17:00时裂缝检测结果中,2组裂缝基本检测不出来,说明此时段裂缝温度接近地表沙子温度,温差较小,对比度较差,难于识别。
结合表3不同时刻裂缝F1、沙子和植被的温度和温差分析可知,裂缝边缘检测效果较好的时间段,裂缝F1、沙子和植被之间存在以下规律:① 裂缝的温度应高于沙子和植被的温度;② 裂缝、沙子和植被之间应存在一定温差;③ 裂缝与地表沙子的温差决定裂缝能否被识别,裂缝与植被的温差则影响检测结果中噪声、伪边缘的多少。
4 结 论
(1)经对神东矿区上湾矿一地裂缝区域采取无人机搭载红外相机进行全天候监测,实验证明无人机红外遥感技术可有效监测采矿诱发的地裂缝,且更高效、成本更低。夜间采集的红外图像中地裂缝更易被识别,特别是3:00~5:00,地裂缝的识别效果最佳。
(2)1:00~5:00和21:00~23:00,裂缝F1、沙子及植被的温度处于较低值,裂缝F1的温度高于沙子及植被,其与沙子的温差约为4 ℃、与植被的温差在1~4 ℃;9:00~15:00,裂缝F1、沙子及植被的温度处于较高值,裂缝F1的温度介于植被和沙子,裂缝F1与沙子、植被的温差分别为负值和正值,变化范围较大,其值分别为-12.52,14.04 ℃。其中7:00~11:00,裂缝F1与沙子、植被的温差不断增加,13:00~15:00,裂缝F1与沙子、植被的温差不断下降。而7:00,17:00,裂缝F1与沙子的温差较小,地裂缝不易被识别。
(3)采用PFoM评价指标对一阶微分算子、二阶微分算子以及改进边缘检测方法的地裂缝检测结果进行评价,改进边缘检测算法的PFoM值为0.571,明显高于其他边缘检测方法,对红外图像中地裂缝具有良好的检测效果。
(4)综合分析不同时刻红外图像中地裂缝边缘检测结果和不同时刻裂缝F1、沙子和植被的温度和温差可知,裂缝边缘检测效果较好的时间段,裂缝、沙子和植被之间存在以下规律:① 裂缝的温度应高于沙子和植被的温度;② 裂缝、沙子和植被之间应存在一定温差;③ 裂缝与地表沙子的温差决定裂缝能否被识别,裂缝与植被的温差则影响检测结果中噪声、伪边缘的多少。
猜你喜欢
云南大学学报(自然科学版)(2022年1期)2022-02-21
小资CHIC!ELEGANCE(2021年40期)2021-11-08
好孩子画报(2020年4期)2020-05-14
校园英语·上旬(2020年1期)2020-05-09
儿童故事画报·发现号趣味百科(2019年4期)2019-05-10
电子制作(2018年23期)2018-12-26
红岩(2017年6期)2017-11-28
卷宗(2017年16期)2017-08-30
新高考·英语基础(高一)(2016年7期)2017-07-06
安徽冶金科技职业学院学报(2015年3期)2015-12-02