
电磁超声扫描装置及其控制系统的设计探讨
2021-03-24 06:59孙家全
中国应急管理科学 2021年3期
关键词:控制系统
孙家全
摘要:就本文所讲电磁超声技术而言,不需要耦合介质和对试件进行预处理即可实现在高温、高速、表面粗糙等一些相对比较恶劣的环境下进行试件非接触性检测作业,本文通过对电磁超声扫描装置进行相应的设计,促使探头能够实现在X、Y两个方向进行步进扫描作业,同时还可实现对探头高度进行相应调节,以此达成对探头扫描轨迹进行控制的目标。就此本文针对电磁超声扫描装置及其控制系统的设计进行详细探讨,旨在以此为相关人士提供有价值的参考。
关键词:电磁超声 扫描装置 控制系统
中图分类号:TB553
前言
电磁超声技术是通过对超声波在缺陷部分的反射、投射以及散射存在的缺陷问题进行无损探伤检测作业。而本文所讲的电磁超声扫描装置的设计研究就是基于此基础上提出来的,通过扫描装置对超声信号的有效值进行验证分析,同时通过扫描装置还可进行板材在线检测装置的研制,以此推动铝板自动化检测,这对我国铝合板材的检测水平提升有积极性研究意义。
一 电磁超声扫描装置的整体结构设计
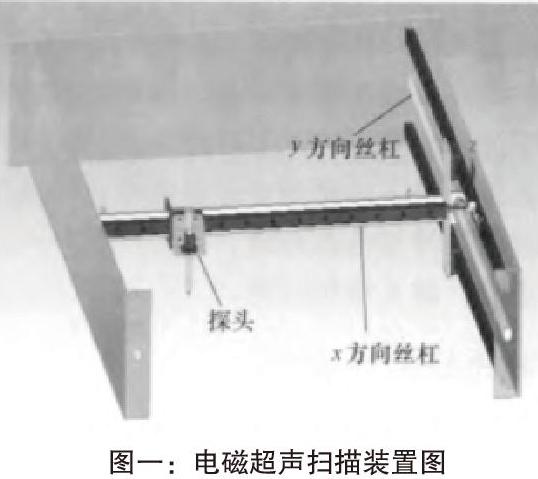
关于扫描装置的整体结构设计,主要采用十字交叉重叠结构进行相应设计,其具有紧凑性强、空间占用面积小的优势。本文所讲的装置结构设计非常简短,一方面能够有效减短加工所用的时间和成本支出,基于保证定位精度的基础上确保整个装置的检测范围能够实现对整个工件的覆盖效果。从整体上来看下图一的机械结构图,其中两个步进电机作为探头在进行平面运行时的动力源,其中一个步进电机借助丝杠,将原本的电机旋转运动逐步转变为探头在X方向进行直线运行;而另一个步进电机就会驱动处于X方向的丝杠,使其顺延Y方向向上进行直线运动,通过以上两个电机对探头在X、Y两个方向的运行进行相应控制,以此来实现对探头平面控制。下图一为电磁超声扫描装置图:
图一:电磁超声扫描装置图
对于扫描装置的探头与工件两者之间的距离调整可采取手动方式来对其进行相应的调整,在进行检测时,通常情况下会要求探头与试件两者保持相应间隙距离,也就是提高距离,若提高距离发生变化情况下,就会对回波信号接收成效带来相应影响,而本文所讲的电磁超声扫描拍装置就是基于控制探头定位,对其扫描轨迹进行相应控制,并对提高距离的改变可能对缺陷检测产生的影响进行检测。
二 电磁超声扫描装置的控制系统设计
1硬件设计
在控制系统的设计中,其中核心部件为单片机,通过键盘来对运行的参数进行设定,以此对步进电机运用状态起到控制作用,其中数码管和LED的主要作用在于显示步进电机运行期间的转动速度和方向。
2软件设计
单片机刚上电时应处于初始化状态,也就是Flog默認为0,然后按启动键,这时候步进电机即可进行匀速扫描(可根据使用需求对探讨的扫描速度和方向进行相应的调节[1])。若标志位Flog处于1的位置时,电机工作状态处于定位模式,然后根据需求设置相应的运行步数,设置好之后即可按启动键,步进电机就会根据设定要求下运行,电机完成设定的步数后就会停止运行,即探头定位完成。
关于步进电机的速度控制,在进行探头扫描时,获取到探讨扫描速度以及是否处于匀速运行状态具有一定的重要性,这主要在于匀速扫描能够对标识缺陷尺寸以及完成阈值进行报警,以此来达成电磁超声的自动化检测目的,以此减少探伤所用时间,进一步强化其在运行效率,对扫描装置能够在最快时间内准确进行铝合金工件跟踪扫查、实时对检测数据进行记录有积极性应用意义。
关于步进电机的定位控制,在进行铝板存在缺陷部位、表面波声轴线上部外振幅分布以及表面波扩展角部分进行检测过程中,需要借助探头的作用开展定位作业,所谓定位,从本质上来来讲,就是运用探头在起始位置直至目标位置两者之间的直线距离,将这部分距离换算为步数,以此来实现探头定位[2]。
在进行实际步进电机定位控制过程中,为实现在最快时间内进行探头定位,通常情况下采用加速-匀速-减速这一定位过程进行相应的定位左营,对于加速和减速两个阶段的时间要求应尽可能的短,对于中间匀速部分应采取尽可能长的时间运行,这样做的目的在于降低在定位过程中存在的误差问题,同时也要尽可能的防止出现失步和过冲情况。当前应用比较普遍的阶梯升速法能够很好的满足上述要求,因此本文运用该种方式对探头定位控制进行研究。
电机在起动阶段以800Hz的频率运行,然后进行匀加速运行,在加速过程中平均每个脉冲频率会向下走5步,当频率运行参数达2200Hz情况下,步进电机即可开始以匀速的状态运行,等到其完成之前已经设定的运行步数后即可进行减速运动,减速和加速的运行过程刚好是相反的,电机会以启动脉冲频率来停止运行。
基于以上,在进行程序编写过程中,将加速和减速两者的运行步数分别设置为70步,其余步数在匀速阶段完成。具体来讲:其一,对于加速阶段的运行步数,也就是步进电机处于升速阶段,由最开始设置的800Hz逐步上升至2100Hz,在这个过程中频率变化量和每个脉冲频率下走参数信息为100Hz和5步;其二,对于匀速阶段的运行步数,也就是步进电机处于匀速阶段,在这个状态下电机的脉冲频率持续在2200Hz的状态下运行,该阶段所走步数的计算方式为预置步数-(升速阶段步数+减速阶段步数);其三,对于减速阶段的运行步数,也就是步进电机处于减速阶段,由2100Hz逐步下降至800Hz,对于频率变化量和每个脉冲频率下走参数信息,与上述的加速阶段设置基本相同,但其频率处于不断降低状态。
总结:综上所述,首先本文通过对电磁超声扫描装置整体结构进行设计,一方面能够实现探头在X、Y方向进行单独扫描运动,另一方面也可进行复合扫描运动;其次,本文又从硬件和软件两方面来分析电磁超声扫描装置的控制系统设计,通过以上设计,能够进一步强化对探头的直线距离控制,促使探头定位更加精准。
参考文献:
[1]沈小倩. 机械手智能物料搬运装置及其控制系统的设计[J]. 机械制造, 2019(4):1-1.
[2]李晶晶. 浅析四自由度视觉装置设计及其控制系统实现[J]. 山东工业技术, 2019, 292(14):159-159.
沈阳汉为科技有限公司 辽宁沈阳 110000
猜你喜欢
科技创新导报(2016年20期)2016-12-14
科技创新导报(2016年20期)2016-12-14
科学与财富(2016年26期)2016-12-01
科学与财富(2016年26期)2016-12-01
考试周刊(2016年88期)2016-11-24
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
科技视界(2015年25期)2015-09-01
