基于STM32 非接触式物体形状和尺寸自动测量系统
2021-03-28 04:30邹礼斌刘梓涵杨兴聪
科学技术创新 2021年6期
邹礼斌 刘梓涵 杨兴聪
(1、重庆交通大学机电与车辆工程学院,重庆400074 2、重庆交通大学航运与船舶工程学院,重庆400074)
1 系统硬件功能概述
该系统由STM32 控制器、信息显示模块、云台(舵机)、OPENMV、激光测距仪以及电源模块构成,系统硬件结构图如图1 所示。
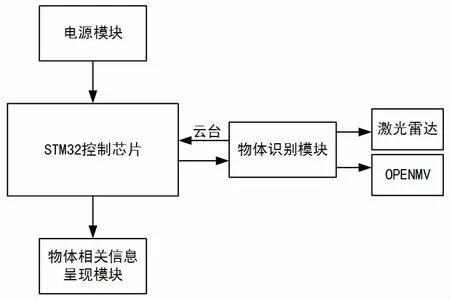
图1 系统硬件结构图
相对高电压电池组经过降压模块之后为整个系统供电,激光测距仪用于精准测量并反馈特定物体的相对距离,OPENMV用于识别并反馈特定物体的形状、颜色和尺寸,云台搭载OPENMV 以及激光测距仪后配合寻找特定物体位置,显示模块用于把STM32 得到并处理好的特定物体相关信息显示出来,整系统能精准识别物体。
2 系统主要模块
2.1 图像识别模块原理
2.1.1 霍夫圆变换原理及圆检测
在极坐标系中,可以用圆心坐标(a,b)以及半径r 来刻画一个圆。

图2 笛卡尔坐标系圆形图
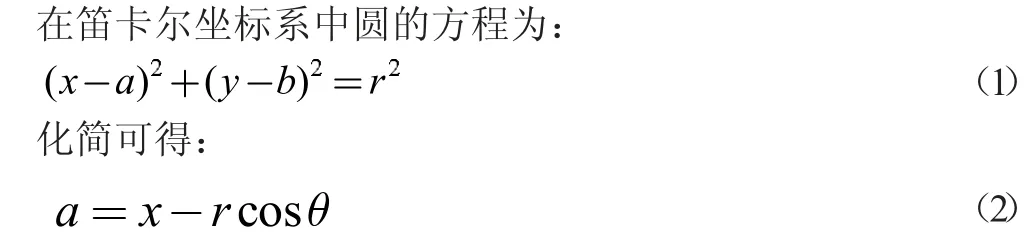
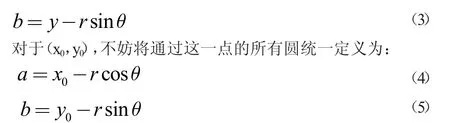
则可以理解为:每一组(a,b,r)代表一个通过点(x0,y0)的圆。
如图3 的三维曲线,这是通过给定一点,在三维直角坐标系中,绘出所有通过该点的圆所表示的曲线。
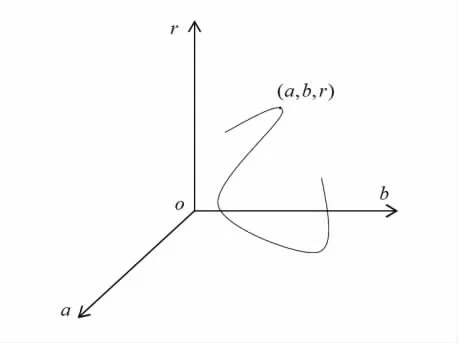
图3 三维直角坐标曲线图
假设获取到了一图像,对图像中所有的点进行以上的操作后,如果两个不同点得到的曲线在三维直角坐标系a-b-r 中相交,即它们有一组公共的(a,b,r),也就是说它们都在同一圆上。两曲线交点越多,这个圆上的点越多,即这个交点表示的圆就越“清晰”。可以设置一个阈值,用以决定多少条曲线交于一点才可以认为检测到一个圆。简单概括霍夫圆变换检测原理:实时监测图像中每个点对应曲线之间的交点,并预先设定好阈值,当曲线交于这个点的数量超过了阈值,那么可以认为(a,b,r)点在图像中为一个圆。
2.1.2 模板匹配NCC 算法
模板匹配NCC 算法也就是归一化相关匹配法,归一化积相关是一种典型的基于灰度的相关算法,其原理如下:如要检测M图像中是否出现N 模板相近的图像,那么我们预先获取模板N,尺寸为B×B,现假定有一待检测图像的M,尺寸为A×A,有A>>B。其中A,B 分别代表待检测图像M图像素和模板图像N像素。简言之,即用模板N 寻找图像M中“类似”模板N 图像的部分,然后用相关函数计算匹配的相似度得出图像M中“类似”模板N 的部分图像位置。具体而言,图像N 在图像M从上往下、从左往右逐一检测,模板N 所覆盖占用的检测子图记为Mi,j,(i,j)为检测子图的左上角像素点在待检测图M中的坐标。通过逐一检测,以相关性函数计算检测子图与模板N 的灰度相关值并记录,那么相关值最大的检测子图位置即M中与模板N 的匹配位置。把归一化积相关匹配算法定义为:

此方法抗白噪声干扰能力强,且在灰度变化及几何畸变不大的情况下精度很高[1]。
2.1.3 图像识别模块总结
基于以上两种算法,可以基本识别圆形、三角形、矩形,甚至各类在物体不是很特殊的(如较长直线物体)情况下的形状,由于圆形在模板匹配中,精确度并不高,所以采用专门的霍夫圆形检测算法,可以有效提高识别效率。
2.2 基于ToF(飞行时间技术)激光雷达测距原理
激光雷达测距本质上是利用到了“拍频效应”,所谓“拍频效应”,简言之即频率相近的两个信号互相叠加后产生名为拍频的频率差,两波叠加产生的合振幅出现时强时弱的周期性变化。驱动电流一部分驱动发射激光元器件向被测物发射一束激光,而另一部分作为本振信号和经过反射的激光信号产生叠加产生拍频信号,然后对拍频信号作相应的计算处理得出距离,实现距离和频率的换算。在本文中,仅述波形为三角波的测距原理。
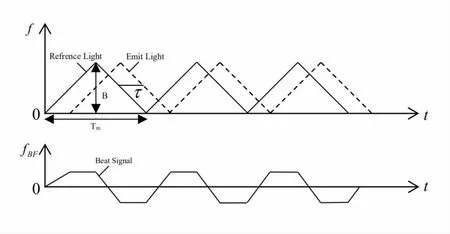
图4 三角波测距雷达原理
据图4 计算,可得出本振信号的简单地角频率表达式,将其积分,从而计算本振信号的相位,进而求得本振信号的函数表达式为:
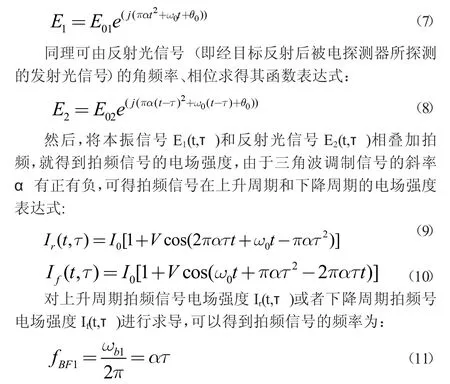
最后将图4 中各参数字母换成相应的表达式,可得距离表达式为:

3 理论分析计算
目标边长(直径)计算:
摄像头测量目标形状应用了“比例运算”。现假设有一乒乓球,在近处有OPENMV 摄像头正对其采集信息,如图5。在我们感性认知中,离摄像头越远,摄像头图像显示中小球就越小,这其中就有:乒乓球与小球的距离与小球图像直径所占的像素大小成定比例反比关系。
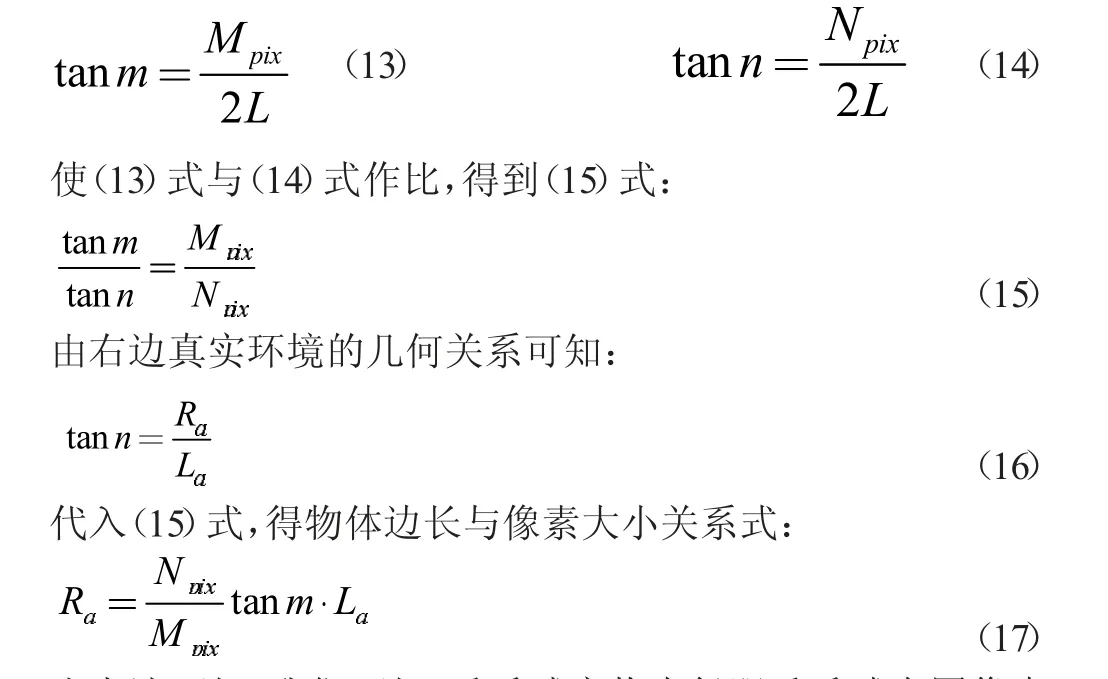
由上述可知,我们可知,乒乓球实物直径跟乒乓球在图像中所占的像素大小成正比例关系,我们以此推导,物体边长(直径)所占像素大小亦跟该物体与摄像头距离成反比,根据这个原理便可计算物体形体参数。
结束语
该测量系统负责测量物体,测量模块由OPENMV 以及激光测距仪构成,并搭载于云台上通过STM32 控制芯片控制其协调有序的工作。其中OPENMV 识别物体形状使用到了霍夫圆变换原理和模板匹配NCC 算法,激光测距仪则通过激光反射原理测得物体的相对距离,各模块经过反复理论分析计算,实验反复调试后,可精准测得物体相关的各类信息。
猜你喜欢
建材发展导向(2022年23期)2022-12-22
建材发展导向(2022年20期)2022-11-03
中国交通信息化(2022年9期)2022-10-28
建材发展导向(2022年12期)2022-08-19
汽车工程师(2021年12期)2022-01-18
一重技术(2021年5期)2022-01-18
考试与评价·高二版(2020年2期)2020-09-10
电子制作(2019年22期)2020-01-14
汽车维修与保养(2015年8期)2015-04-17
网络与信息(2009年8期)2009-05-10