二阶领导跟随多智能体系统事件触发一致性
2021-03-30 02:08罗毅平林国汉
湖南工程学院学报(自然科学版) 2021年1期
罗毅平,蔡 聪,肖 星,林国汉
(湖南工程学院 电气与信息工程学院,湘潭411104)
0 前言
多智能体系统一致性在许多领域有着广泛的应用,如电网[1]、无人机编队[2-3]、生物系统[4]等领域.由于其通信成本低、效率高,受到了大量科研人员的关注,成为了控制领域的研究热点.
大量科研人员投入到智能体的研究热潮中,并通过不同的角度、不同的模型充分地研究一阶多智能体系统,并获得了许多成果[5-7].然而在上述成果中,考虑的都是一阶智能体系统.但在实际应用中,大多数都是二阶甚至高阶系统,仅仅考虑位移一致性是远远不够的,特别是同时受位置和速度控制的智能体,比如编队控制中的无人机,必须同时保证智能体的位移和速度一致,才能精确地保证状态一致.Ren等[8]也指出二阶智能体系统与一阶系统不同,生成树的存在并不是二阶智能体系统实现一致的充要条件.由此表明,将一阶一致性算法简单地应用在二阶系统上是不合适的,换句话说,从一阶系统扩展到二阶系统,并不是在一阶模型上的简单延伸,因此,研究二阶系统是非常有挑战性的,也是很有必要的.
近年来,已有许多学者对二阶多智能系统的一致性控制进行了研究[9-12],研究内容主要围绕一致性算法展开,一般来说,二阶智能一致性算法分为无领导跟随一致性算法和只有一个领导者的领导跟随一致性算法.例如文献[9-10],就是通过无领导跟随一致性算法解决了二阶系统达成一致性问题.文献[11-12]讨论了在一个领导者的情况下,跟随者在控制协议作用下追踪领导者,最后与领导者状态达成一致.需要注意的是在上述文献中都是基于多智能体系统是线性的前提下进行研究的.然而,在智能体系统模型中各个智能体内部诸因素之间更多地呈现出一种非线性关系,如在无人机编队控制系统中,各个无人机内部因素肯定是一个非线性因素.因此,研究带有非线性因素的智能体系统是非常有实际意义的.为了解决非线性因素对一致性问题带来的影响,Li等[13]利用Lipschitz公式对非线性因素进行线性化处理,最后得出多智能体系统达成二阶一致的充分条件,在Li的基础上,Wang等[14]研究了非均匀扰动的二阶非线性系统的一致性问题,提出线性化处理的前提,并不再要求非线性函数满足任何全局Lipschitz条件,这也大大弱化了线性化处理的要求.这样,线性化处理很快地被引入到多智能体系统控制中,并迅速地产生了大量研究成果.
然而,上述研究成果都没有考虑系统中的时延.由于智能体之间需要相互通信,这样智能体之间的信息传输就不可避免的产生时间延迟.时延的产生必将影响系统的稳定性和控制性能.目前,已有许多论文研究了带有时滞的多智能体系统一致性控制问题,如Li等[15]研究离散系统中的步长和时滞参数一致性,给出了系统达成一致的参数集,并证明了该研究结果也适用于具有输入时滞的系统中.需要指出的是,以上分析带有时滞的多智能体一致性控制的文献中,都只是关注一阶系统的一致性.涉及时延二阶系统中的一致性控制这方面的研究很少.Ma等[16]研究在不确定时滞下,二阶智能体系统鲁棒一致性,但仅限于非领导跟随模型.目前,具有时滞的二阶智能体系统仍有许多问题需要更深入地研究.
在研究智能体通信时滞的同时,还需要考虑智能体之间信息传输的通道信道容量,由于通信资源是有限的,所以每个智能体与相邻智能体之间的通信不可能一直持续.为了节约通信成本,许多科学家提出采样数据控制.传统的采样系统是通过预先设定采样周期,同步触发控制器更新[17-18],由于其设计的便利性,得到了广泛应用.传统的采样控制设计重点在于采样周期取值,若采样的周期过短,则会造成通信资源大量浪费,并且产生数据冗余,阻塞信道.相反,周期设定过长,系统的控制性能将大大降低.因此时间触发通信系统的采样周期设定是保守的,资源利用率较低.
为了提高通信资源利用率,提出事件触发通信方式来提高通信资源利用率,并减少通信负担[19-20].不同于时间触发方案,事件触发不需要预先设定触发周期,而是设定一个系统可承受的误差阈值,一旦智能体的局部误差超过这一阈值,控制器才进行更新.这样大大减少了通信资源损耗,并有效地缓解通信通道的阻塞,同时又保证了控制性能.近年来科研人员对事件触发机制进行了充分的研究,并迅速产生大量的成果[21-24].Liu等[21]基于无向拓扑结构下,提出事件触发机制,研究了一阶系统的平均一致性.Yang等[22]则研究了高阶系统下基于观测器的领导跟踪输出一致性问题,并同时考虑事件触发方案.在二阶系统中,Xie等[23]分别通过集中式事件触发策略和分散式事件触发策略对二阶领导跟随系统的一致性问题进行了研究,然而,Xie等人并没有考虑系统时滞和系统的非线性因素,而现实应用系统中,往往这二者都同时存在,然而在现有的二阶一致性文献中,几乎都没有将二者同时考虑在内,现有的方法可能无法同时处理系统中的时滞与非线性项.
受上述启发,本文研究一类同时具有输入时滞和非线性动力学因素的二阶多智能体系统的事件触发一致性控制问题,本文的贡献有三个方面:首先,本文研究的是一类二阶领导跟随模型,在考虑了系统固有的非线性动力学因素基础上,同时考虑输入时滞对系统的影响.其次,针对具有输入时滞和非线性因素的二阶领导跟随模型,获得了实现事件触发策略下该系统一致性的充分条件,并排除了Zeno行为,有效地降低了通信成本.最后,在仿真结果中验证了领导者的加速度设定的大小对系统稳定性产生影响.
1 预备知识与系统描述
1.1 图论知识
为了方便问题描述,给出以下定义:Rn和Rn×m分别代表n维实数矩阵和n×m实数矩阵,I和0分别表示为合适维度的单位矩阵和零矩阵.1N表示所有元素为1的列向量,sup表示最小上确界.
1.2 系统问题描述
跟随者的动力学行为:

其中t∈(-τ,+∞),xi(t),vi(t)∈RN,分别代表跟随多智能体i的位置、速度状态量.x0(t)、v0(t)分别代表领导者的位置、速度状态量.p(t) ∈RN代表智能体i的驱动函数以及ui(t)∈RN代表智能体i的控制输入.f(vi(t),t)、f(v0(t),t)代表跟随者智能体i的动力学特性的连续可微非线性向量函数和领导者的动态输入.
定义1二阶领导跟随系统如果满足下列条件就说明该系统(1)(2)达到一致性.

引理1对于任意具有合适维度的向量x,y以及合适维度的对称正定矩阵Z,都具有下列不等式:±xTy≤xTZx+yTZ-1y
引理2具有合适维度的矩阵A、B、C、D,利用克罗内克积公式,可以得到:
(1)(A+B)⊗C=A⊗C+B⊗C
(2)(A⊗B)T=AT⊗BT
(3)(A⊗B)(C⊗D)=(AC)⊗(BD)
引理3舒尔定理:下列对称线性不等式:
等价于下列式子:

假设1非线性函数f(vi(t),t)是连续可微的向量函数,存在一个正的标量ρ,使得满足下列不等式:

2 主要结果
在本篇文章中,将通过设计合适的控制器以及提出集中式事件触发机制来解决在无向连接拓扑图下的二阶领导跟随系统(1)(2)的一致性问题.
2.1 集中式事件触发控制策略
在假设控制器输入时滞为固定常时滞下,提出集中式事件触发策略,智能体在满足事件触发条件时触发通信采样,一般来说,事件触发条件是一个包含全局状态测量误差阈值的不等式,当实际测量误差超过这一阈值便触发控制器更新.其触发函数具体表达式在式(6)中给出.
为了解决系统(1)(2)的一致性问题,设计的控制器目的为了解决控制输入常时滞与智能体内部的非线性因素的影响,其具体控制协议如(3)式:
其中,κ代表控制增益,且κ>0,τ为大于0的常数,代表控制器输入时滞,aij>0为智能体i,j相连的耦合强度,bi>0以及j∈Ni.tk,tk+1分别代表第k次、第k+1触发时刻.Tk=tk+1-tk代表的是采样周期,当t∈[tk,tk+1),每个智能体i在这一期间广播其状态xi(tk)、x0(tk)、vi(tk)和x0(tk),即在两次相邻触发时刻之间,系统的控制输入保持不变.
将(3)式中控制器带入(2)式,设ξi(t)=xi(t)-x0(t),ηi(t)=vi(t)-v0(t).
e1(t)=ξ(tk)-ξ(t),e2(t)=η(tk)-η(t),其中误差量e1(t),e2(t)∈RN.将误差量代入,
并令e(t)=[ eT1(t),eT2(t)]T,再设置y(t)为[ ξT(t),ηT(t)]T,所以我们得到:

其中对应的矩阵表达式如下:
2.2 事件触发机制
触发函数:
触发条件为:

在式(5)(6)中,其中k1、k2、k3都是大于0的常数,Q、M1、M2、M3为合适维度的矩阵.
在式(6)中的集中式触发条件,实际上是设定了一个全局状态误差阈值e(t),也称为系统(1)(2)在一致性下所能忍耐的最大误差值,一旦系统误差超过此值,系统一致性便会被破坏,为了维持系统一致性的稳定,此刻事件机制会迅速触发控制器(3)更新输入,此刻测量误差将重置为0.
定理1对于无向连通拓扑下的二阶多智能体系统(1)(2),如果存在正定对称矩阵P,R,Q,W和矩阵M1,M2,M3,使得下列线性矩阵不等式成立,当触发函数(5)在满足触发条件(6)下将触发控制器(3)更新,该系统达成一致性.


上式子中k1,k2,k3均大于0,当g(e(t),t)渐近于0时,所有跟随者的控制器将会被触发,每个多智能体的控制输入将会被更新.
证明:对于闭环系统(4),构造李雅普诺夫函数如下:


对时间t求导后再根据Jensen不等式可得:

将(4)式代入(9)式后,根据引理1,并通过假设1和引理2中的克罗内克积公式可以将带有 |Fˉ|的式子进行转化,最后为了方便计算,设定
δ(t)=[ yT(t)yT(t-τ)eT(t-τ)]T,化简
写成矩阵形式:



根据式(11)可以得到v˙(t)≤δT(t)Jδ(t)≤0,因此闭环系统(4)渐近稳定一致,这也意味着跟随者智能体位移,速度状态与领导者的差值在全局状态误差阈值e(t)范围内,即满足定义1中xli→m∞‖xi(t)- x0(t)‖=0,xli→m∞‖vi(t)- v0(t)‖=0.证 明成立.
另外需要注意的,除了保证系统(1)(2)在控制器(3)下达成一致性外,还需要确保在时间轴上没有事件的累积点,即没有Zeno行为,这点可以通过严格采样周期Tk来保证,以下给出定理2.
定理2对于二阶多智能体系统(1)(2),假设无向拓扑图论G是连通的,在任意初始条件下,控制协议(3)与集中式事件触发策略(5)(6)渐进解决了多智能体系统的一致性问题,另外,通过式(12)计算采样周期的最小值,闭环系统不会出现Zeno行为.


3 数值仿真
在本章节中,主要通过数值仿真来验证该集中式事件触发协议的有效性.
该仿真研究的是由1个领导者和5个跟随者构成的多智能体系统,其智能体系统拉普拉斯矩阵L和局部度B如下所示.系统的无向拓扑图如图1所示,其中0代表领导者,数字1~5代表跟随者智能体.

图1 智能体系统的无向连接拓扑图
为了验证系统(1)(2)在控制协议(3)作用下能够达成一致性,我们设定智能体的初始状态,各智能体的位移分别:x0(t)=1.2683 ,x1(t)=2.7346,x2(t)=-2.432,x3,(t)=4.8951,x4(t)=7.1191,x5(t)=-4.732.
各智能体速度分别为:
v0(t)=-2.71,v1(t)=0.7329,v2(t)=-3.1691, v3(t)=4.112,v4(t)=2.7316,v5(t)=-8.511
对于系统中的非线性参数,我们设定为
f(vi(t),t)=sin(10t)-0.12vi(t),输入时滞τ=0.01.系统中领导者的加速度p(t)=0.2tsin(10t).控制器参数k=7.68,定理1中的参数k1=k2=k3=9.4.其仿真图如图2~图5所示.通过仿真验证了本文思路的可行性.

图2 智能体位移状态变化图
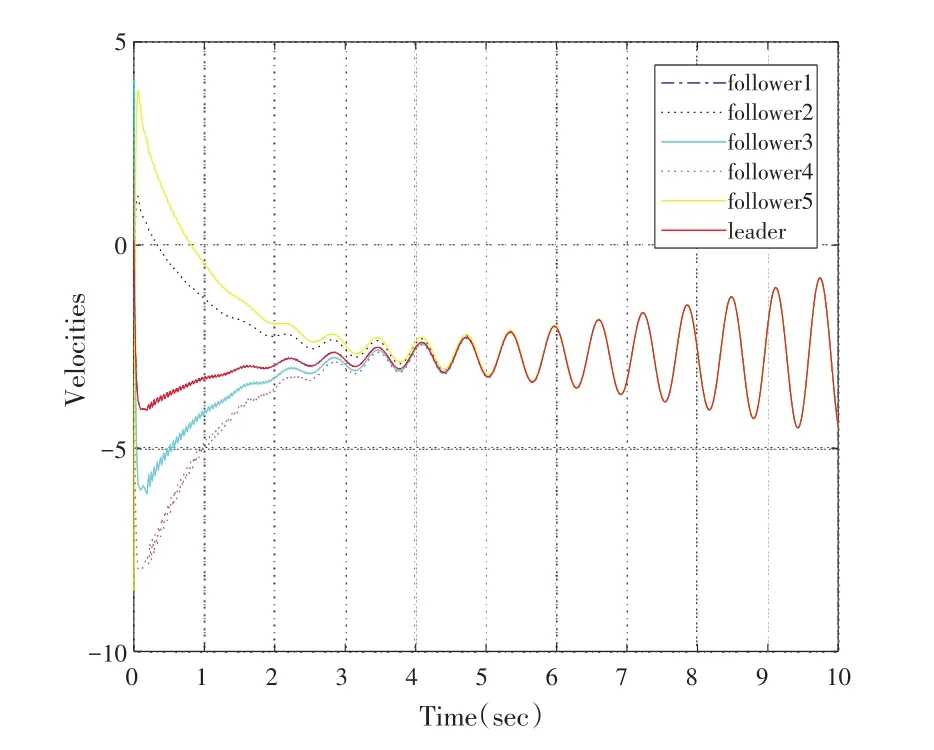
图3 智能体速度状态变化图

图4 测量误差范数‖ ? e(t)‖变化

图5 事件触发时间间隔图
4 结束语
本文研究的是一类二阶多智能体领导跟随一致性控制问题,给出了该系统达成一致性的充分条件.该系统同时考虑了输入时滞和存在非线性因素的情况,基于李雅普诺夫稳定性理论与矩阵不等式设计了与时滞相关的控制器,并利用事件触发机制,有效地降低了通信成本,提高了资源利用率和系统的控制性能.最后数值仿真验证了该方法的可行性,然而考虑到每个智能体在执行任务供给的能量有限,如何权衡能量的消耗与性能的优化是我们下一步需要进行研究和解决的问题.
猜你喜欢
中等数学(2021年9期)2021-11-22
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
北方工业大学学报(2019年5期)2019-03-30
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
领导文萃(2018年17期)2018-10-30
上海师范大学学报·自然科学版(2018年3期)2018-05-14
服装学报(2016年5期)2016-03-06
中外管理(2015年1期)2015-03-11