蒜薹机械化收获技术现状分析*
2021-03-30 11:48冯芮李超徐洪岑杨清华宋井玲金诚谦
中国农机化学报 2021年2期
冯芮,李超,徐洪岑,杨清华,宋井玲,金诚谦, 2
(1. 山东理工大学农业工程与食品科学学院,山东淄博,255000; 2. 农业农村部南京农业机械化研究所, 南京市, 210014)
0 引言
大蒜是我国的重要经济作物和出口创汇产品,种植面积约占世界总种植面积的1/3,产量约为世界产量的75%。蒜薹作为大蒜的花茎,也是人们喜欢吃的蔬菜之一[1-3]。从全国范围来看,近几年来,蒜薹产量一直在稳步增长。2018年全国主产区共收贮蒜薹80 849 万kg[4-5],蒜薹的产量和收获方法与收获时长有着极大的关系,因此为了调节劳力紧张程度和保证蒜薹提早或延晚上市,在长期生产实践中,蒜农对于如何抽好蒜薹,积累了丰富的经验,但还停留在人工采摘阶段,劳动强度大,效率低。采收蒜薹时温度为重要的影响因素,晴天中午或者午后采摘蒜薹,此时蒜薹有些萎蔫,叶鞘与蒜薹容易分离,并且叶片有韧性不易折断,可减少损伤[6]。有不少农户由于不会科学采摘蒜薹,造成蒜薹质量差、产量低,蒜头个子小、减产多[7]。蒜薹收获时既要保证蒜薹质量又不能伤害植株影响其继续生长,实现机械化收获比较困难,目前蒜薹收获仍以人工为主,严重制约蒜薹及大蒜产业的进一步发展,适合大蒜生产的农艺技术和相应的机械化收获技术亟待解决。近年来,劳动力不断进入城市,农村劳动人员数量越来越少,雇佣劳动力的成本也越来越高。为了增强我国蒜薹收获的机械化水平、缓解蒜薹收获劳动力短缺的问题,研究适合我国大蒜种植模式的蒜薹收获机械迫在眉睫。本文分析了蒜薹收获机械的研究现状,提出了存在的问题以及今后的发展方向,旨在为蒜薹收获机械的研发提供借鉴和参考,推动大蒜生产机械化的发展进程。
1 大蒜收获模式
蒜薹收获机械的性能要求与大蒜收获模式有关,蒜农通常根据自身的需求和自然条件选择合适的大蒜品种和相应的收获模式,以实现经济利益最大化[7]。
1) 以收大蒜头为主。收获时主要收获蒜头,蒜薹产量较低,采薹时应尽量保持假茎完好,以利蒜头生长。
2) 以收蒜薹为主。专门的薹用大蒜品种[8],主要目的是采收蒜薹,可剖开或用针划开假茎提出蒜薹,这样可以实现蒜薹高产和优质,但是存在植株易枯死、蒜头产量低且易散瓣等问题。
3) 既收大蒜头又收蒜薹。收获蒜薹时不能损伤大蒜假茎,保证后期蒜头的营养供给。这种模式下对蒜薹的采摘时期要求严格,不可过早或过迟。
2 蒜薹的收获方法对蒜薹、蒜头产量的影响
现有的蒜薹收获机基本上是以人工收获蒜薹的方法为原理开发研制的,不同的蒜薹收获方法对蒜薹和蒜头的产量的影响各异,人工收获蒜薹方法主要有4种(图1)。
1) 铲薹法。用一个一端削成锋利且带弧形缺口的片状工具,长约50 cm,一只手提住蒜薹,另一只手用工具顺着蒜薹连续铲上部的三片叶子,再在垂直方向挤压蒜薹底部,同时提住蒜薹的手上提蒜薹。
2) 剖茎取薹法。用一个一段带有小钉的弧形竹片,从假茎离地面10~13 cm处刺破假茎的叶鞘,向上滑动,再将蒜薹基部掐断,把蒜薹抽出。
3) 夹薹法。用夹子在离地面15 cm左右处把蒜薹夹扁,摘去上边两片叶子,再用两手徐徐提出蒜薹,此法收蒜薹产量高、断薹率低,对各种大蒜品种均适宜。
4) 扎薹法。用锥形工具向假茎离地面5~7 cm的地方垂直扎穿,然后把蒜薹徐徐抽出。由于蒜薹基部很嫩,穿扎后一抽即出,抽取的蒜薹产量稍低,但品质好。


铲薹法夹薹法

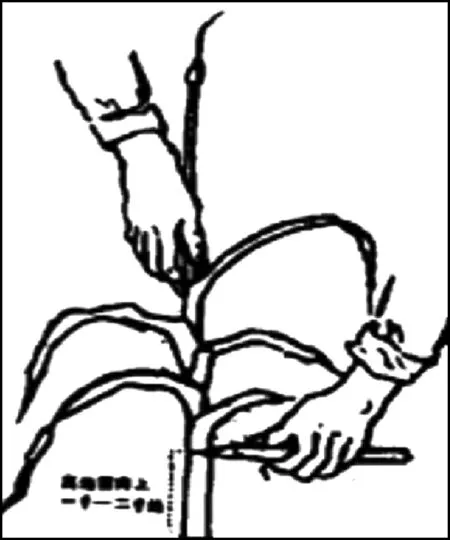
剖茎取薹法扎薹法
不同的蒜薹收获方法薹长差异很大。夹薹和剖茎取薹,是从3~4片叶下部使蒜薹截断,抽出时不易断,而铲薹是从锁叶往下铲,铲出的部分少且易断。剖茎取薹法抽取蒜薹最长,比铲薹法多取出了7.63 cm,夹薹法比铲薹法多取出5.8 cm。不同的蒜薹收获方法,对假茎都有不同程度的破坏,残留的直立青叶数量也不同,直立青叶的数量决定光照面积,影响植株进行光合作用,堆积为蒜头提供营养物质的有机物,影响后期蒜头重量的增加[9-10]。扎薹法采薹后残留直立青叶最多,故而蒜头重量也最大,铲薹法和剖茎取薹对假茎的破坏程度大,剩余的直立青叶少,蒜头重量较轻。目前的收获机主要采用剖茎取薹法、夹薹法和扎薹法收获蒜薹,剖茎取薹法适合以收蒜薹为主的大蒜收获模式,而夹薹法与扎薹法适合既收大蒜头又收蒜薹的大蒜收获模式。
3 蒜薹收获机的研究现状
目前,国外种植大蒜的国家主要有智利、阿根廷、西班牙、印度、韩国及美国一部分地区,总种植面积达200 khm2,年产量3 000 kt,蒜薹收获需要大量的劳动力,而欧美国家地广人稀,劳动力不足,一般不会抽取蒜薹,蒜薹主要是依靠我国进口[11-12],因此基本没有关于蒜薹机械化收获技术方面的研究。
我国人多地少,大蒜种植普遍采取精耕细作的模式,尤其是近年来大力发展大蒜特色支柱产业,蒜薹产业也跟着崛起[13]。随着大蒜种植规模化发展和雇工困难,蒜农对蒜薹收获机的需求越来越迫切。大蒜的三种收获方式都要在收获蒜头前20 d左右收获蒜薹,蒜薹收获时不能伤害植株影响其继续生长,对机械化收获要求较高。国内各个企事业单位对蒜薹收获机械纷纷展开了研究,以不同思路解决蒜薹机械化收获时的关键问题,已取得一些成果,但现有的蒜薹收获机还处于理论研发阶段,均为发明专利,尚未有推广使用的蒜薹收获机。本文对现有研究成果进行综合分析,旨在为我国蒜薹收获机械进一步发展提供借鉴和参考。
国内的蒜薹收获机按驱动方式不同可分为内燃机驱动和电力驱动式,内燃机驱动式又可分为自走式和悬挂式。电力驱动式根据操作形式又可分为全自动蒜薹收获机与半自动蒜薹收获机。
3.1 内燃机驱动式蒜薹收获机
内燃机驱动式蒜薹收获机由内燃机提供动力,自走式本身具备行走装置,由驾驶员操纵行驶,具有机动灵活、转弯半径小、生产效率高、操作方便、视野良好等优点,但结构复杂,动力部分利用率低;悬挂式本身不具备动力,要么依靠行走轮提供动力,要么依靠拖拉机的输出轴提供动力,具有机动性高,结构简单,重量轻的特点[14]。
3.1.1 自走式蒜薹收获机
2009年,郭贵生等[15]发明了一种剖茎式蒜薹收获机,如图2所示。该机采用剖茎取薹原理收获蒜薹,主要装置为喂入辊、螺旋刀轴、导流板和抽薹辊。喂入辊将单行大蒜植株收拢成束,喂入螺旋刀轴,刀刃将大蒜茎秆纵向剖切开,顺着导流板滑入抽薹辊,抽薹辊将蒜薹抽出。在剖切过程中,刀刃长度固定,导流板与旋转刀轴相互配合,呈一开口角度,直径大的茎秆在开口较大处被剖切,直径较小的茎秆在开口较小处被剖切,对蒜薹粗细的适应性比较好。
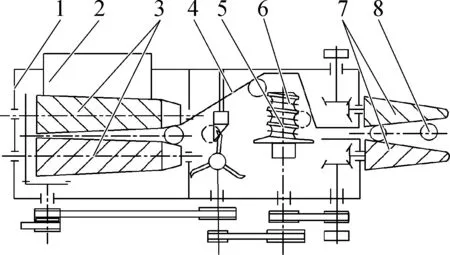
图2 剖茎式蒜薹收获机Fig. 2 Split stem garlic bolt harvester1.机架 2.收薹箱 3.抽薹辊 4.导流板 5.螺旋刀轴6.刀刃 7.喂入辊 8.茎秆
2018年,刘安琴等[16]发明的蒜薹联合收获机,如图3所示。内部的蒜薹扶持机构、辅助切割机构、横向输送机构、打捆机构、纵向输送机构分别将蒜薹扶正、剖茎、输送、收集、打捆,最后,由输送带将蒜薹送入收薹箱内。与上述收获机相比,两者收获原理相同,该机增加了打捆和输送功能,自动化程度更高。
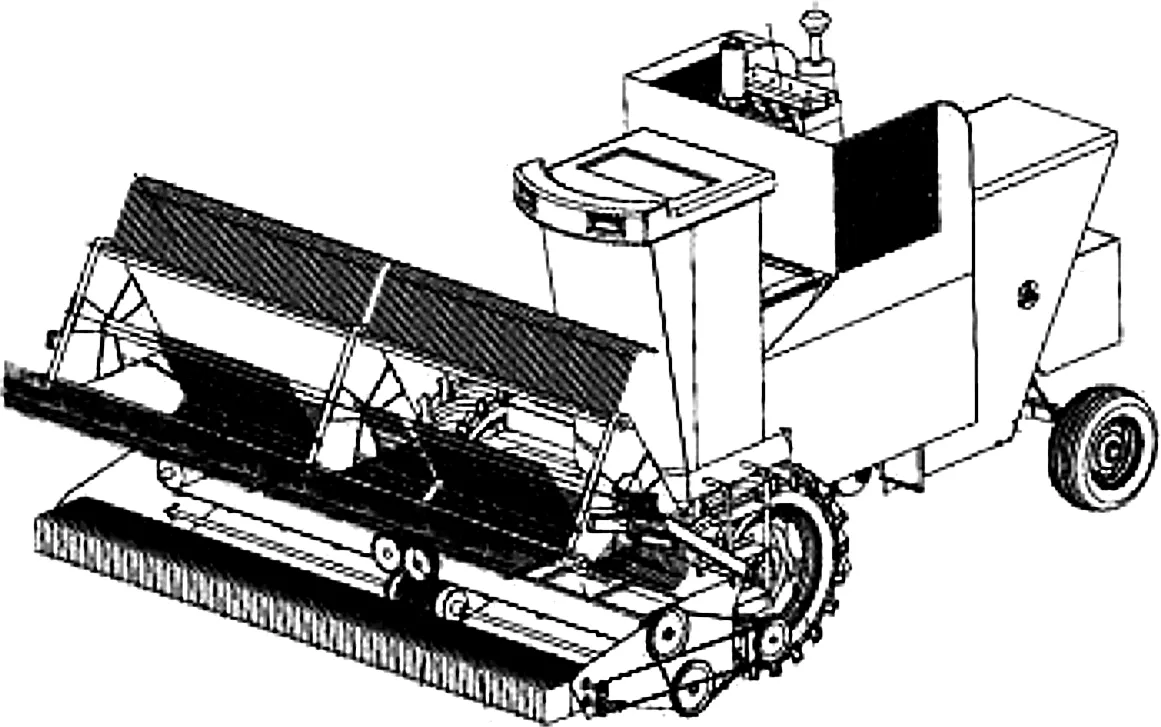
图3 蒜薹联合收获机Fig. 3 Garlic bolt combine harvester
2017年,耿令新等[17]发明了一种蒜薹收获机,如图4所示。主要装置为摆刀装置、输送装置、去皮装置和锥形段与圆柱形段组成的抽薹装置。蒜薹被抽薹装置的锥形段引导进入抽薹辊的圆柱形段,由底部的摆刀将茎秆切断后经两根抽薹辊的圆柱形段夹持并上提,上提过程中去皮装置将大蒜茎秆划破剥皮抽薹,输送装置将蒜薹运入收薹箱,剥皮与抽薹同步进行。
该机具与前两台机具原理类似,但增加了摆刀和去皮装置,在剖茎之前摆刀先将大蒜茎秆沿地面10~13 cm处切断,切断的蒜薹在胶辊对蒜薹的拉力和去皮装置对茎秆的摩擦力的作用下剖茎去皮取薹,剖茎去皮装置可以将包裹在蒜薹外的茎秆剖开多刀,使蒜薹与茎秆分离较彻底,剖茎去皮效果较好,易于抽薹。但由于两护板平行设置不可调,对蒜薹粗细的适应性较差。剖茎去皮装置如图5所示。

图4 剥皮式蒜薹收获机Fig. 4 Peeling garlic bolt harvester1.摆刀装置 2.去皮装置 3.抽薹辊 4.输送装置 5.收获箱 6.变速箱 7.车架 8.支地拖轮

图5 剖茎去皮装置Fig. 5 Peeling device1.抽薹辊 2.护板 3.破皮刀
2012年,杨建[18]发明了自动一种自动回旋式蒜薹收获机,如图6所示。主要装置为前拨辊、旋转梳式抽取装置、分离装置、收集箱和旋转胶轮与两链带组成的蒜薹挤断夹持装置。工作时,前拨辊旋转把散乱分布的蒜薹和青叶捋顺抬起,并拨送到旋转梳式抽取装置前方,由相对旋转的胶辊喂入两间距小于蒜薹直径的挤断夹持装置链带之间,蒜薹被挤断,上方的旋转梳式抽取装置的抽薹爪将蒜薹夹住抽出,被分离装置分离,分离出的蒜薹由输送带送到收集箱。
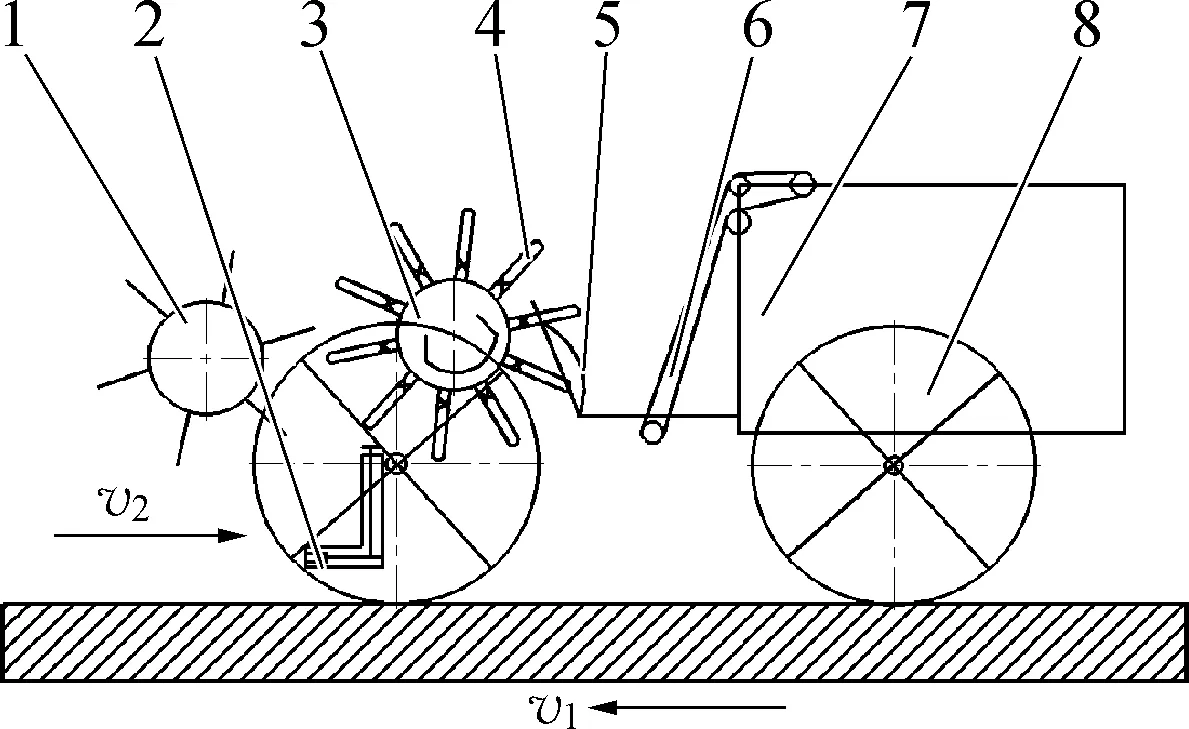
图6 自动回旋式蒜薹收获机Fig. 6 Automatic rotary garlic bolt harvester1.前拨辊 2.蒜薹挤断夹持装置 3.抽薹爪 4.旋转梳式抽取装置 5.分离装置 6.输送带 7.收集箱 8.驱动轮
该机采用夹薹法收获蒜薹,收获过程中,机器以速度v1向前运动,蒜薹挤断夹持装置的链带以线速度v2向后运动,v1和v2大小相等方向相反,植株在被夹断过程中绝对速度为零,保证了蒜薹始终处于直立状态,使旋转的抽薹爪在掠过蒜薹时,容易抓住蒜薹,有利于蒜薹抽取。
3.1.2 悬挂式蒜薹收获机
2013年,郭志东[19]发明了一种后悬挂式蒜薹收获机,如图7所示。该机采用直接抽薹法收获蒜薹,主要装置为夹持输送机构、输送器、拖拉机和柳叶结构喇叭状的分禾器等。该机悬挂在拖拉机后方并由拖拉机提供动力。工作时,分禾器从大蒜底部将蒜叶揽起,分禾器不断提升,由于蒜薹伸长后比大蒜叶片要长,最后分禾器内只剩蒜薹,蒜薹被倾斜的夹持输送机构夹住,并随皮带向上移动,蒜薹被抽出,皮带采用柔性材料,对蒜薹损伤小。

图7 后悬挂式蒜薹收获机Fig. 7 Rear hanging garlic bolt harvester1.拖拉机 2.导向板 3.夹持输送装置 4.输送器 5.机架 6.分禾器 7.收集箱
2017年,东营某公司发明了宽幅前悬挂梳齿式蒜薹收获机[20]。主要装置为梳齿板和与拨禾轮原理类似的拨薹轮。拨薹轮负责将蒜薹扶正,使梳齿板顺利插入大蒜植株上端,利用梳齿板间隙大于蒜薹直径,小于蒜薹花蕾直径的特点梳过植株,由于蒜叶很薄,能从梳齿间滑过,蒜薹身部较细,可以插入梳齿间隙,当梳齿梳过蒜薹花蕾包时,花蕾包会卡在梳齿下部,拔出蒜薹。与上述机器相比,两者收获原理基本相同,该机的梳齿板类似于梳齿式棉花联合收获机的采摘装置[21],结构简单,宽度可增加,收获效率较高。
2017年,范素香等[22]发明了一种前悬挂式蒜薹收获装置,如图8所示。主要装置为导板、夹持提拔装置和间歇式针扎机构等。工作时,分禾器将蒜薹沿着导板导入夹持提拔装置的两个相对转动的辊体之间,下部的刺针做间歇运动将蒜薹扎断,蒜薹在辊体上螺旋槽摩擦力的作用下被抽出。该机采用扎薹法收获蒜薹,扎断机构为间歇式多次针扎机构,蒜薹既容易被单独从茎杆里面抽出来,夹带的茎叶少、干净,又不切断茎秆。

图8 前悬挂式蒜薹收获装置Fig. 8 Front hanging garlic bolt harvesting device1.导板 2.间歇式针扎机构 3.夹持提拔装置 4.收薹箱 5.悬挂架
3.2 电驱动式蒜薹收获机械
电驱动式蒜薹收获机器采用蓄电池为电动机提供电源[23],全自动式由电动机为工作部件和行走装置提供动力,半自动式的电动机只为工作部件提供动力,人工推动行走。两者都需要人工控制前进方向。
3.2.1 全自动式蒜薹收获机
2015年,刘义平等[24]发明了一种双圆盘式蒜薹抽取装置,如图9所示。主要装置是由刚性球冠形圆盘体和圆环外缘弹性体组成的圆盘夹持轮。两个圆盘夹持轮对称安装,形成圆盘夹持喂入角2b,工作时由外缘弹性体夹持蒜薹,两圆盘夹持轮等速、同向绕轴线转动并随机器前进,蒜薹被抽出。

图9 双圆盘式蒜薹抽取装置Fig. 9 Double disc type garlic bolt extraction device1.支撑杆 2.上摆杆 3.连杆 4.圆盘夹持轮
该机具采用直接抽薹法收获蒜薹,但该机与其他以直接抽薹法为原理的机器不同,行距、喂入角和底盘高度通过相应部件可以调节。行距可通过调节机架上的调节螺母增大或减小行距;可以通过更换不同大小的圆盘夹持轮改变喂入角2b大小,对蒜薹粗细的适应性较好。可以通过调整连杆改变夹持起始点相对地面的高度,适应收获不同高度的蒜薹。
2015年,袁志华等[25]发明了一台智能蒜薹收获机,如图10所示。主要装置为传感器、定位打孔装置、机械手臂式抽取装置、驱动装置和收集箱。工作时,蓄电池为步进电机供电,通过减速器将动力输出为两部分,一部分输出到行走装置,另一部分输出到液压泵。当机器接近蒜薹时前方传感器中识别与定位组件对大蒜植株个体进行识别,确定大蒜基部对茎秆在三位空间中的坐标,并将得到的坐标位置发送至控制系统,控制系统控制液压泵驱动液压缸带动定位打孔装置、抽取装置分别对大蒜和茎秆扎断和抽取,提高了准确率。与其他扎薹法蒜薹收获机相比,该机智能化程度较高。

图10 智能蒜薹收获机Fig. 10 Smart garlic bolt harvester1.定位打孔装置 2.机械手臂式抽取装置 3.驱动装置 4.收集箱
3.2.2 半自动式蒜薹收获机
2017年,王宪伦等[26]发明了针刺式蒜薹收获机,如图11所示。该机由伺服电机提供动力,人工推动机器前进,主要装置为倒耙状夹持器、梳理装置、有突起的圆盘滚筒和由电磁继电器、Y型钢叉、刺针组成的针刺装置。机器前方梳理装置随圆盘滚筒转动,倒耙状夹持器将蒜薹夹持,当夹持器与竖直线呈约30°时,圆盘上的突出部分触发继电器开关,安装在弹簧上的铁片由于失去继电器的吸引力弹出,Y型钢叉上的刺针会迅速刺入大蒜茎叶中,夹持器随圆盘继续转动将断裂的蒜薹抽出。针刺结构如图12所示。
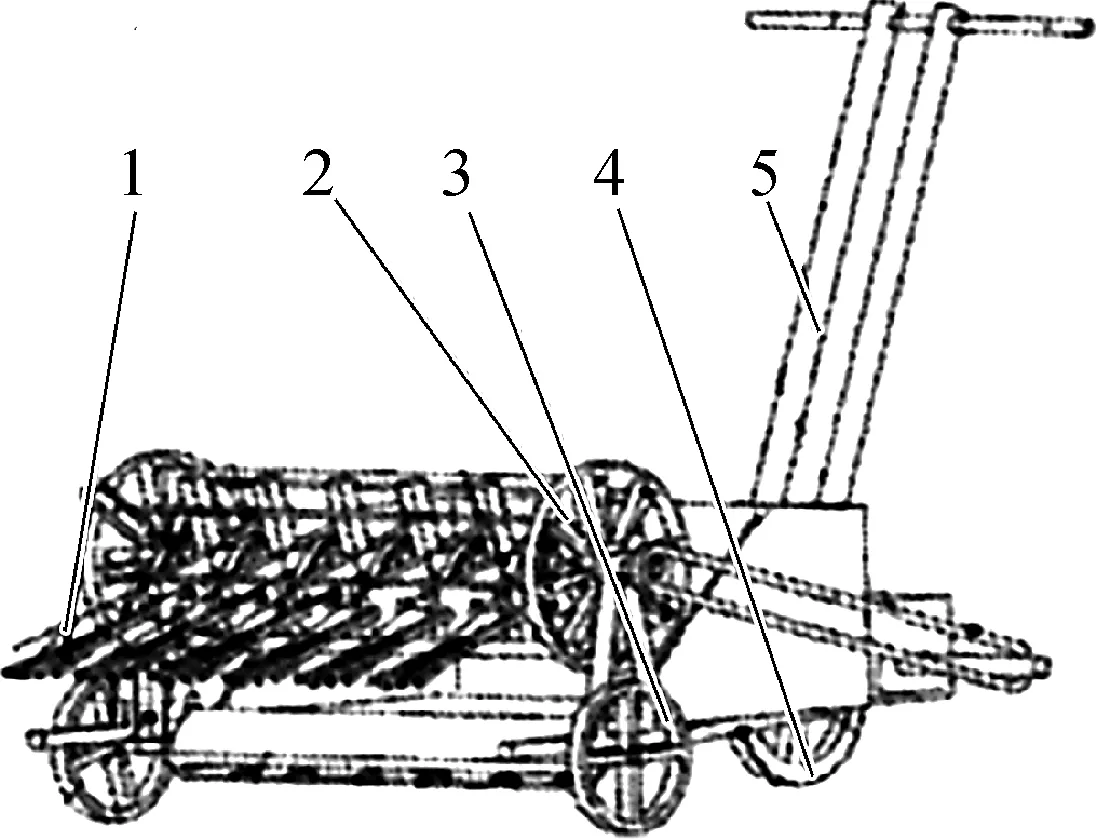
图11 针刺式蒜薹收获机Fig. 11 Needle-punched garlic bolt harvester1. 梳理装置 2.圆盘滚筒 3.地轮 4.导向轮 5.扶手

图12 针刺结构图Fig. 12 Acupuncture structure diagram1.导向柱 2.Y型钢叉 3.刺针 4.电磁继电器 5.弹簧
2018年,白宏周[27]发明了一种半自动蒜薹收获装置,如图13所示。主要装置为V型导向块、针刺装置、导向锥和有柔性固定突起、旋转方向相反的拔薹辊等组成。前方V型导向块将蒜薹聚拢送入刺钉装置扎断,设置在针刺装置上方的导向锥将蒜薹输送到燕尾槽中进行导向,导向锥均匀将蒜薹分布在燕尾槽两侧并送入拔薹辊,蒜薹被抽出。王树成等[28]发明了的半自动抽取式蒜薹收获机如图14所示。与上述半自动蒜苔收获装置原理类似,但增加了横向输送装置,收集的蒜薹比较整齐。
2018年,曲哲等[29]发明了一台新型电驱动式蒜薹收获机,如图15所示。主要装置为拨禾机构、导禾机构、针扎机构、有禾夹机构的抽拔装置、收集箱和伺服电机等。在拨禾机构和导禾机构作用下,茎秆被导入曲柄连杆控制的间歇式针扎机构扎断,同时抽拔装置上的禾夹机构夹取蒜薹,将蒜薹送至收集箱。
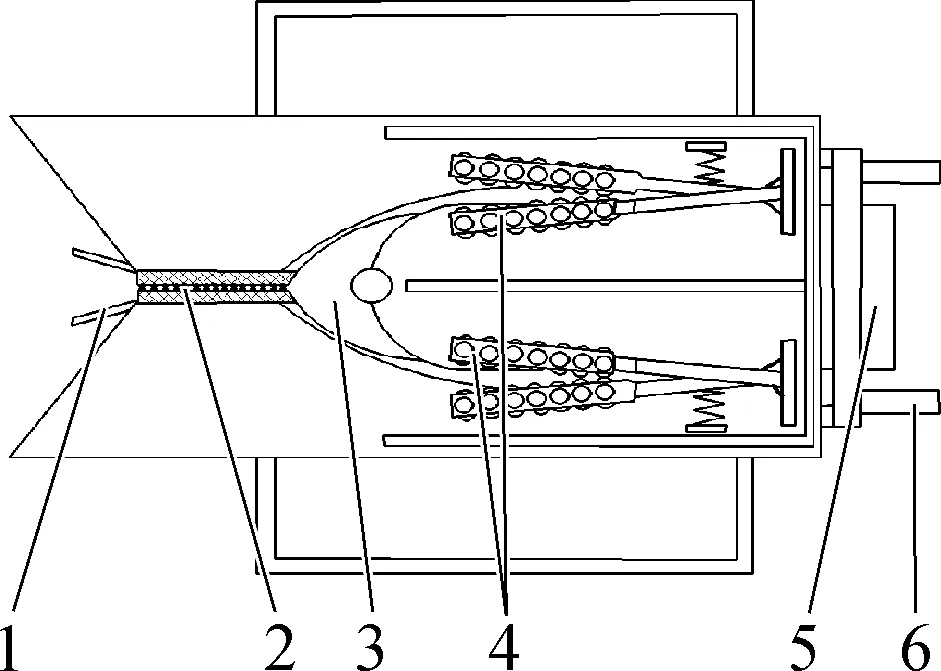
图13 半自动蒜薹收获装置Fig. 13 Semi-automatic garlic bolt harvesting device1.V型导向块 2.针刺装置 3.导向锥 4.拔薹辊 5.蓄电池 6.扶手

图14 半自动抽取式蒜薹收获机Fig. 14 Semi-automatic extractable garlic bolt harvester

图15 新型电驱动式蒜薹收获机Fig. 15 New electric drive type garlic bolt harvester1.拨禾机构 2.导禾机构 3.针扎机构 4.抽拔装置5.禾夹机构 6.收集箱 7.伺服电机
以上半自动式蒜薹收获机均采用扎薹法收获蒜薹,收获蒜薹时对关键部件的要求较高,运行速度不能过快或过慢,速度慢容易出现卡壳造成堵塞现象,速度过快植株容易被拉断,因此均选择伺服电机,利用伺服电机低速运行平稳、抗过载能力强的特点,增强关键部件运行的精度。
与全自动式蒜薹收获机相比,半自动式蒜薹收获机依靠人工推动机器前进,机器设置的行数一般只有1~2行,具有机型小、便于运输等特点。为了增加了机器的稳定性,机器底盘设计比较低。
3.3 内燃机和电动机共同驱动式蒜薹收获机
这类蒜薹收获机行走装置的动力由内燃机体提供,工作部件的动力由电动机提供,可以由两者共同驱动带动机器前进工作,也可以只关闭内燃机,通过人工推动机器前进。可以在自动化和半自动化之间相互转换。
2018年,聊城市农业机械科学研究所发明了一种喂入式蒜薹收获装置[30],如图16所示。主要装置为锥形分禾器、喂入链、拨齿和由一对锥形辊组成、转动方向相反、间隙小于蒜薹直径的拔薹辊等。相邻两个锥形分禾器将蒜薹分行,喂入链带动拨齿将蒜薹拨向拔蒜薹辊组,被拔出后由后方喂入链带入的未拔起的蒜薹将其挤入输送带,运送到收薹箱。
综上所述,直接抽薹不能保证蒜薹长度一致,先将大蒜茎秆基部剖开、扎断或者夹断的方法处理后再进行抽薹,减小蒜薹截断部位的结合力,使蒜薹容易被抽出且长短一致。

图16 自动和半自动相互转换式蒜薹收获装置Fig. 16 Automatic and semi-automatic interchangeable garlic bolt harvesting device1.输送带 2.驱动轴 3.拔薹辊 4.喂入链5.分禾器 6.拔齿 7.收薹箱 8.扶手
4 蒜薹收获机械化存在的问题与建议
4.1 现有蒜薹收获机比较分析
收获原理不同,假茎的破环程度和抽出蒜薹的长度不一样,采用剖茎取薹的原理收获蒜薹的收获机,取出的蒜薹长度长,但是会将大蒜假茎剖开,严重破坏大蒜假茎,影响后期蒜头生长。这种收获原理适用于只收蒜薹的大蒜种植模式;采用直接抽薹法抽取蒜薹,不会对假茎造成影响,但是抽出来的蒜薹长短不一影响蒜薹产量。直接抽薹法比较适合只收大蒜头的大蒜种植模式;利用扎薹法原理收获蒜薹,关键部件多样化,抽出的蒜薹较长,但扎薹时对大蒜假茎也会造成轻微破坏,影响对蒜头营养物质的供给;利用夹薹法收获蒜薹,对假茎的破坏程度最小,同时抽取的蒜薹较长,能更大程度的实现了蒜薹的大蒜的双丰收。以扎薹法和夹薹法为原理制造的蒜薹收获机都适用于目前我国大部分地区既收蒜薹又收大蒜头的大蒜种植模式(表1)。经对比分析,夹薹法最优。
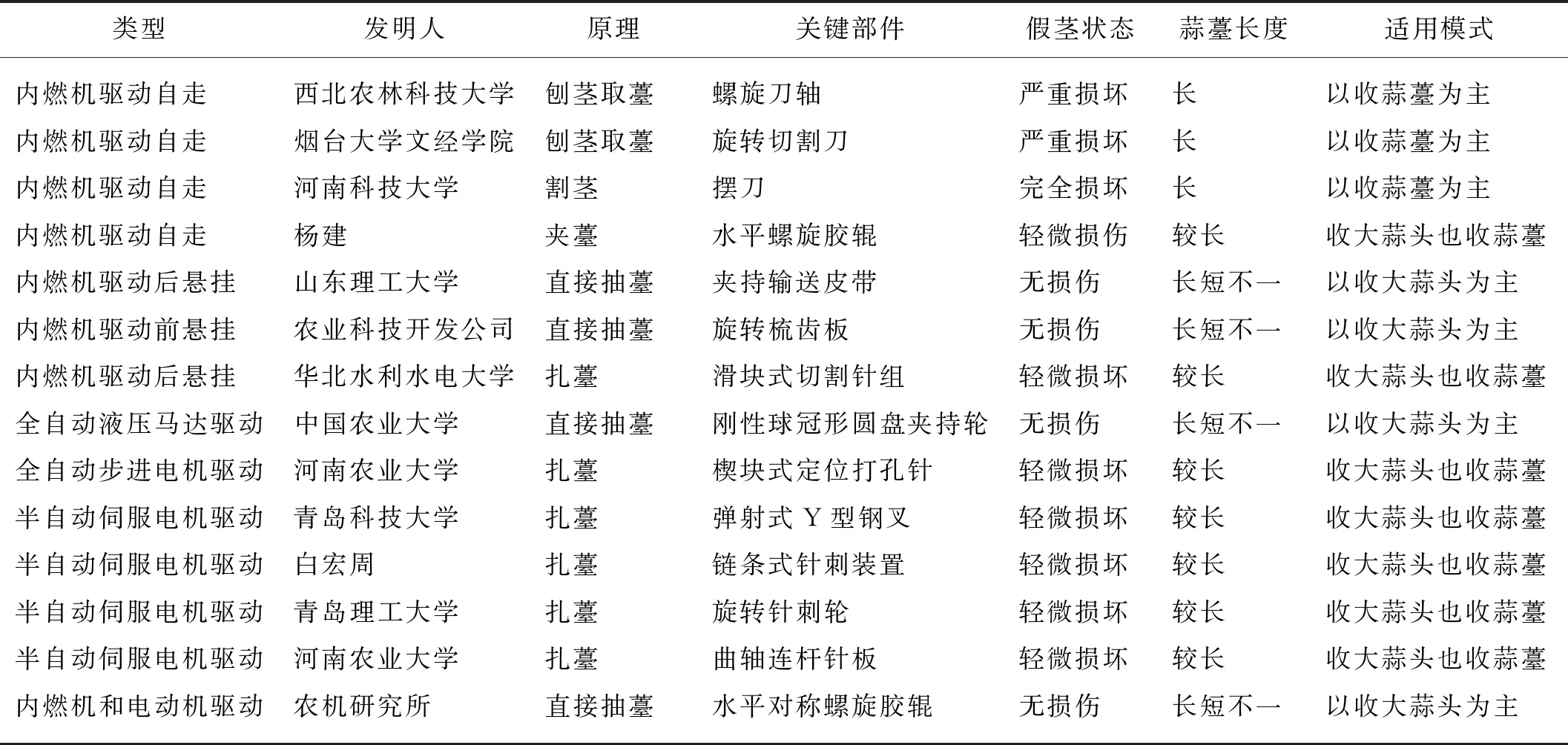
表1 国内几款蒜薹收获机械Tab. 1 Several domestic garlic sprout harvesting machinery
4.2 蒜薹收获机械存在问题
我国蒜薹收获机的研究还处于起步阶段,虽然有很多高校以及研究机构已经研究出了蒜薹收获机,但至今没有推广应用。
1) 农机与农艺融合性差。我国蒜薹收获方式多,且各个地区大蒜种植株距、行距等差异较大,种植模式多样,导致蒜薹收获机械研究和推广困难重重。
2) 影响蒜头产量,蒜薹损伤严重。采用剖茎取薹和直接割断假茎然后剥皮抽薹方法的蒜薹收获机,虽然能获得较长的蒜薹,但是在收获过程中,剖茎刀容易损伤蒜薹,且对假茎造成一定程度的破坏,影响后期蒜头的生长,蒜头产量低。
3) 现有机型大多采用纯机械的方式收获蒜薹。收获时依靠人工进行对行,关键部件与茎秆难以对齐,容易对植株和蒜薹造成损伤。
4.3 蒜薹收获机械发展建议
1) 规范大蒜种植模式。针对不同地区、不同收获方式统一种植规范。同时收获机可根据现实情况实现行距、株距微调,以适应不同地区蒜薹机械化收获的通用化作业。
2) 采用夹薹法收获蒜薹。国内大部分地区的大蒜种植模式主要是以既收蒜薹又收大蒜头为主,因此收获时要同时实现大蒜和蒜薹的双丰收。以夹薹法为原理研究蒜薹收获机,通过夹薹和抽薹装置的“一夹一抽”,既保证了蒜薹的质量,也保证了蒜头的产量。
3) 向智能化方向发展。针对纯机械蒜薹收获机收获部件准确性低的问题,利用传感器采集植株信息,传递给蒜薹收获机的收获部件进行自动对行,保证收获部件工作准确性。如果将此技术运用到蒜薹收获机械上,会大大减小对植株和蒜薹的损伤,提高收获效率和经济效益。
5 结论
1) 国外地广人稀,劳动力不足,没有蒜薹收获机械方面的研究,种植大蒜一般不抽取蒜薹。
2) 目前国内对蒜薹收获机的研究正处于起步阶段,现有的蒜薹收获机还处于理论研发阶段,大部分为发明专利,推广应用较少。
3) 现有的蒜薹收获机采用的蒜薹收获方法主要有剖茎取薹法、扎薹法、夹薹法和直接抽薹法,其中剖茎取薹法抽取的蒜薹最长,蒜头产量最低;其他两种方法抽取的蒜薹长度一致,蒜头产量高;直接抽薹法抽取的蒜薹长短不一。
4) 为保证蒜薹收获长度和蒜薹收获后蒜头的生长,蒜薹收获应采用夹薹收获方法,并向智能化方向发展。
猜你喜欢
江西农业大学学报(2022年3期)2022-07-07
阅读(中年级)(2022年5期)2022-06-06
作文小学高年级(2020年6期)2020-12-29
发明与创新·小学生(2020年4期)2020-08-14
发明与创新(2020年15期)2020-04-18
东方少年·阅读与作文(2019年2期)2019-06-11
农业机械学报(2019年4期)2019-04-29
畜牧与饲料科学(2018年5期)2018-06-13
现代园艺(2018年2期)2018-03-15
土壤与作物(2013年3期)2013-03-11