基于车速依赖静态输出反馈的自主汽车路径跟踪控制
2021-03-31 07:00姜正伟李鹏旭张斌李攀硕
南京信息工程大学学报 2021年1期
姜正伟 李鹏旭 张斌 李攀硕
0 引言
近年来,随着汽车行业的快速发展以及科学技术的不断进步,人们对于提高汽车行驶的安全性和道路利用率的需求不断增加,因此自主地面汽车(Autonomous Ground Vehicle,AGV,以下用AGV来表示自主汽车)的发展已经成为汽车及信息领域的新兴研究热点[1-2].对于AGV 而言,使其按照预定路径行驶的路径跟踪问题是AGV的基本问题之一[3-4].在路径跟踪任务中,通过控制汽车自动转向装置,使汽车行驶路径与参考路径之间的横向偏移和航向误差收敛,从而实现路径跟踪的目的.
目前已有诸多控制方法应用于AGV的路径跟踪研究.例如PID控制:文献[5]设计了一种嵌套的PID转向控制,使汽车在曲率不确定的道路上进行路径跟踪;文献[6]在AGV的路径跟踪控制中采用遗传算法来优化PID控制器中的参数,避免了控制器参数转向的繁琐和费时问题.自适应控制与滑模控制也被应用于路径跟踪控制中:文献[7]提出了一种基于无模型自适应控制的无人驾驶汽车横向控制方案,将汽车路径跟踪控制问题转化成预瞄偏差角跟踪问题;文献[8]提出了一种基于李雅普诺夫函数(Lyapunov)的自适应RBF 神经元网络补偿控制策略来提高汽车路径跟踪精度;文献[9]提出了一种基于非奇异终端滑模和主动抗干扰控制的鲁棒AGV路径跟随控制策略,将复杂路径跟随问题简化为简单的偏航角跟踪问题;文献[10]则提出了一种将自适应与滑模控制相结合的新型方法,用于AGV的自动转向控制.
近年来,各种基于模型预测控制(MPC)的控制方法也已经广泛应用于汽车的路径跟踪和规避障碍中[11-13].文献[14]基于模型预测控制原理,设计了一种智能网联汽车的路径跟踪控制器以提高车辆在高速运动过程中的转向精度和稳定性;文献[15]设计了一种纵向和横向组合控制策略用于汽车引导,其中MPC技术用于横向跟踪控制,纵向跟踪控制由基于Lyapunov的另一种控制律来保证.但是使用MPC方法需要解决在线优化问题,这会极大地增加计算工作量,尤其是对于解决非线性MPC问题[16].
上述控制方法通常采用状态反馈进行控制器设计.一般认为横向速度和侧滑角等信息是可以直接测量的,但在汽车实际行驶过程中,横向速度、侧滑角等信息[17]往往只能通过昂贵的传感器进行测量(例如光学传感器或双天线)[18-19],因此在实际应用中使用输出反馈控制是较好的解决办法.文献[18]提出了一种基于驾驶员和汽车模型的动态输出反馈控制器,以帮助汽车更好地跟踪参考路径.同样,文献[20]基于动态输出反馈控制器提出了一种新的自动化共享控制器用于车道辅助系统.但是基于动态输出反馈控制器的方法会增加闭环系统的阶数,在实时计算中往往较为复杂,实现成本较高.
相较于动态输出反馈,静态输出反馈更易于在工程中实现.文献[19,21]提出静态输出反馈控制器用于汽车的路径跟踪,然而文献[19]中用于设计鲁棒H∞静态输出反馈控制器的线性矩阵不等式需要通过遗传算法进行控制器增益求解,而文献[21]中H2静态输出反馈控制器没有考虑道路曲率的影响.近年来,使用两步法求解静态输出反馈控制器[22-23]受到了广泛的关注,例如文献[24]在主动悬架系统中采用两步法提出了一种模糊静态输出反馈控制器,以提高汽车行驶过程中的舒适性.
在以往的AGV的路径跟踪控制研究中,大多数控制方法均假设汽车行驶速度不变[25-26],然而,汽车正常行驶过程中车速通常都是随时间变化的.文献[27]提出了一种鲁棒的增益调度H∞控制器,该控制器通过线性参数变化技术来控制四轮独立驱动电动汽车的横向稳定性;文献[28]设计了一种线性参数变化的静态输出反馈控制器改善窄倾斜车辆的横向稳定性和驾驶舒适性.可见,时变车速将直接影响汽车动力学特性.因此,在AGV 的控制中,考虑时变车速影响对于提高路径跟踪性能至关重要.
通过以上讨论可以发现,在AGV路径跟踪问题中,使用静态输出反馈并考虑车速时变情况的研究并不多见.为此,本文提出了一种速度依赖的静态输出反馈控制器用于AGV路径跟踪控制.本文建立了一个包含跟踪特性及横向动力学特性的梯形多胞体汽车模型,所建立的模型是与车速相关的线性时变模型,更加符合实际应用中汽车行驶的状态.基于该模型,考虑横向速度、侧滑角等信息在汽车实际行驶过程中难以被直接测量,本文采用静态输出反馈控制策略,并引进两步法进行控制器设计,避免了以往静态输出反馈中需要的复杂迭代计算.所设计的静态输出反馈控制器可以根据实时行驶速度,在线调节前轮转向角,使得汽车在保证行驶安全的同时达到路径跟踪的目的.
本文的其余部分结构如下:第1节介绍了汽车路径跟踪动力学系统的建模和本文的问题描述;第2节基于汽车路径跟踪系统的模型使用两步法设计增益调度静态输出反馈控制器;第3节给出了在2种典型道路行驶条件下,AGV的路径跟踪仿真结果;第4节对全文进行总结.
1 系统建模与问题描述
1.1 系统建模
由于汽车的横向动力学特性将影响路径跟踪性能,因此在路径跟踪系统中考虑路径跟踪与横向动力学模型两部分.首先介绍AGV的路径跟踪模型,如图1所示:e表示AGV 实际行驶路径的车辆重心与期望路径之间的横向偏移;ψ代表在预览距离ls处实际前进方向ψh与期望前进方向ψd之间的航向误差,即ψ=ψh-ψd;σ表示从起始位置开始汽车沿期望路径行驶的坐标;p(σ)表示期望路径的曲率;r为汽车的横摆角速度.
AGV路径跟踪模型的动力学方程[29]可表示为
(1)
接下来介绍横向动力学模型.为了方便AGV横向动力学建模,将汽车横向动力学特性用二自由度模型进行描述,如图2所示.汽车的横向动力学特性[30]可表示为
(2)
式中:vx和vy分别为汽车的纵向速度和横向速度;m为整车质量;δf表示汽车的前轮转向角;lf和lr分别为质心到汽车前后轴的距离;Iz为车辆绕过质心垂直轴线的转动惯量;Fyf,Fyr分别为汽车对地面的前后轮胎力.其中前后轮胎力Fyf,Fyr与汽车的前后轮胎侧偏刚度Cf,Cr以及前后轮胎侧滑角的关系为
(3)
前后轮胎侧滑角αf,αr的计算公式为

(4)
因此,汽车横向动力学特性(2)可写为

(5)
其中,
最后,根据汽车路径跟踪模型(1)和横向动力学模型(5),AGV的路径跟踪动力学系统的状态空间可表示为
(6)
定义状态向量x(t)=[e,ψ,vy,r]T,控制输入为前轮转向角u(t)=δf,系统扰动为ω(t)=p(σ).因此,系统的状态空间可表示为
x(t)=Ax(t)+Bu(t)+Bωω(t),
(7)
其中,
从图3中可以看出顶点M和顶点N的坐标分别为(vxmin,1/vxmin),(vmax,1/vxmax),其中线MR和NS分别为顶点M和顶点N的切线,由运动轨迹MN方程可以求出切线MR和线NS的表达式.平移直线MN,可以得到与运动轨迹相切的直线RS,直线NS和直线RS相交于S,直线MR与直线RS相交于R,由此可以获得新的2个顶点R和S.

图3 多胞体模型Fig.3 Polytope model
通过求解,可以得到顶点R和S坐标分别为
R=(vxR,1/vyR),S=(vxS,1/vyS),
其中,

α1(q)=a(1-b),α2(q)=b(1-a),
α3(q)=ab,α4(q)=(1-a)(1-b),
其中,
因此,基于线性时变参数的汽车路径跟踪动力学状态空间(7)可表示为
A(q)x(t)+Bu(t)+Bω(q)ω(t),
(8)
其中,
1.2 问题描述

z(t)=Cx(t),
(9)
其中,


y(t)=Cyx(t),
(10)
其中,
构建静态输出反馈控制器为
u(t)=Ksof(q)y(t)=Ksof(q)Cyx(t),
(11)
其中Ksof(q)是增益调度静态输出反馈(SOF)控制器增益, 其可根据车速变化在线调整增益大小.因此静态输出反馈控制下的路径跟踪闭环系统可表示为
(12)
其中,Ac=A(q)+BKsof(q)Cy.
为了在较大的干扰范围内获得良好的控制性能,本文选择H∞增益来测量控制输出z对于给定的标量γ>0,满足当ω(t)=0时,闭环系统(12)渐近稳定,且对于所有非零ω(t)在零初始状态下,都有ω∈L2[0,∞),控制输出z(t)满足:

(13)
同时为了使汽车在速度时变等外部干扰的条件下获得良好的路径跟踪性能,汽车在行驶过程中的横向偏移和航向误差应尽量收敛到零,横向速度和横摆角速度应控制在一个合理的范围内以保证汽车的横向稳定性.因此,针对这些控制目标,本文设计一个静态输出反馈控制器来确保系统(12)渐近稳定并满足H∞性能指标.
2 车速依赖的静态输出反馈控制器设计
基于所建立的汽车路径跟踪动力学模型,本节提出了一种AGV路径跟踪H∞速度依赖输出反馈控制方法.该方法采用两步法实现,基于通过矩阵变换获得的系统H∞性能条件,给出速度依赖静态输出反馈控制器设计条件,并给出其给定设计参数的求取方法.
首先,引入以下有界实引理:
引理1[31]对于给定的正标量常数γ,如果存在一个对称的正定矩阵P>0满足以下不等式,则系统(12)渐近稳定并满足H∞性能指标.
(14)
其中sys{•}表•+•T,*表示对称矩阵中的对称元素.基于引理1,定理1给出了汽车路径跟踪动力学系统的H∞性能分析条件.
定理1对于给定的标量常数γ,如果存在对称正定矩阵P>0和适当维数的矩阵R,F使以下矩阵不等式成立,那么汽车路径跟踪动力学系统(12)渐近稳定并且满足H∞性能.
(15)
其中,
σ=diag{0 -I0},
Ω=[RT0 -FT]T[Ksof(q)Cy0 -I]=
证明首先由式(15)可得

(16)
由矩阵的Schur补性质,式(16)可变换为
根据引理1可知汽车路径跟踪动力学系统(12)是渐近稳定的,并满足H∞性能指标,证明已完成.
基于定理1结论,定理2进一步提出系统速度依赖的静态输出反馈控制器设计方法.
定理2对于给定的标量常数γ,如果存在对称正定矩阵P>0和适当维数的矩阵Li,F,i=1,2,3,4使以下线性矩阵不等式成立,那么路径跟踪系统(12)渐近稳定并且满足H∞性能指标.
(17)
其中,
Ωi=[(KTF)T0 -FT][(F-1Li)Cy0 -I]=
并且,系统静态输出反馈控制器u(t)=Ksof(q)Cyx(t)如(12)所建立,其控制器增益为
证明由矩阵不等式(15)可知F+FT<0.定义L(q)=FKsof(q)和K=(RF-1)T,则式(15)可表示为:
同样,线性矩阵不等式 (17)可表示为
其中,
[A(q),Bω(q),L(q),Ksof(q)]=
所以可以得出:
因此,基于定理1,可知汽车路径跟踪动力学系统(12)是渐近稳定的,并满足H∞性能指标,定理2证明完成.
定理2中给出了求解静态输出反馈控制器的条件,但是由于矩阵K是未知的,所以无法通过直接求解(17)获得静态输出反馈控制增益Ksof.根据文献[24],如果满足定理2中的条件,则矩阵K将成为状态反馈控制器增益,以下定理将给出一种K的设计方法.
构建一个状态反馈控制器为
u2(t)=Ksfx(t),
(18)
Ksf为状态反馈控制器增益,则状态反馈路径跟踪系统可表示为
(19)
下面提出一个H∞状态反馈控制器设计方法.
定理3对于给定的常数γ,如果存在一个对称正定矩阵Q和矩阵Y,使得以下矩阵不等式成立,那么路径跟踪动力学系统(19)是渐近稳定的并满足H∞性能.
(20)
其中i=1,2,3,4,状态反馈控制器中的增益Ksf=YQ-1.
证明定义矩阵变量P=Q-1,Y=KsfQ,分别对(20)左乘右乘diag(P,I,I),然后(20)可被写为
(21)
基于引理1,类似于定理1的证明,定理3证明完成.
从定理3中,可以获得状态反馈控制器增益Ksf(q),然后通过解决基于定理2的优化问题,可以获得期望的SOF控制器增益Ksof(q).具体设计方法步骤如下:
步骤1.由定理3,求解汽车路径跟踪动力学系统状态反馈控制器增益Ksf;
步骤2.令Ksf=K,由定理2求解出汽车路径跟踪系统静态输出反馈控制器增益Ksof(q).
由以上步骤可见,使用两步法进行输出反馈控制器设计,相较于以往的静态输出反馈控制器设计,数值简单易处理,不需要进行复杂的迭代计算.
3 系统仿真
为了验证本文所提汽车路径跟踪控制方法的有效性,在Matlab中建立车辆动力学及路径跟踪模型,并对常见的单车道变更及双车道变更情境进行仿真验证.在系统仿真中,参考文献[29]中的模型相关参数,其中汽车的质量m=1 200 kg,前后轮胎侧偏刚度Cf=Cr=50 000 N/rad,转动惯量Iz=1 500 kg·m2,预瞄距离ls=2 m,质心到汽车前后轴的距离分别为lf=1.3 m,lr=1.4 m.
3.1 单车道变更操作
首先对车速时变下的AGV进行单车道变更操作测试.汽车期望路径的道路曲率如图4所示.期望纵向速度设定如下:汽车在前半部分从10 m/s加速至15 m/s,后半部分从15 m/s减速至10 m/s,如图5所示.

图4 单车道道路曲率Fig.4 Road curvature variation in one lane changing

图5 单车道变更纵向速度Fig.5 Longitudinal velocity variation in one lane changing
为了验证所提出的两步静态输出控制器对AGV路径跟踪的有效性,图6展示出路径跟踪系统在单车道中,使用所提出的静态输出反馈控制器和状态反馈控制器系统状态对比的仿真结果.从图6中可以看出,路径跟踪系统在静态输出反馈控制器下的横向速度和横摆角速度都表现良好,虽然静态输出反馈控制效果与状态反馈相比有一定差距,但差距均在合理范围内,最大横向偏移也限制在0.2 m以内.图7绘制了两个控制器的前轮转向角的仿真结果.
另外,图8绘出了在不同控制器下的单车道变更操纵全局轨迹仿真结果,从图8中可以判断出两个控制器都能满足单车道变更路径跟踪的要求.

图6 单车道变更操纵下仿真结果Fig.6 Path following simulations for one lane changing

图7 单车道变更中的前轮转向角Fig.7 Front steering angle in one lane changing

图8 单车道变更中的汽车全局轨迹Fig.8 Global trajectory of the vehicle in one lane changing
3.2 双车道变更操纵
对AGV在时变纵向速度的双车道变更操纵下进行测试.汽车期望路径的道路曲率如图9所示,同时汽车在双通道中行驶也进行了加速和减速,纵向速度变化如图10所示.

图9 双车道变更道路曲率Fig.9 Road curvature variation in two lane changing
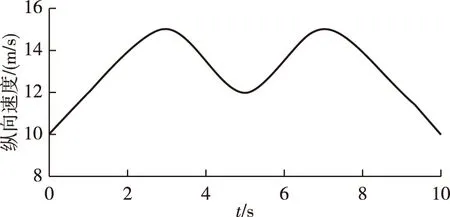
图10 双车道变更纵向速度Fig.10 Longitudinal velocity variation in two lane changing

图11 双车道变更操纵下仿真结果Fig.11 Path following simulations for two lane changing
图11展示出路径跟踪系统在双车道中,使用所提出的静态输出反馈控制器和状态反馈控制器系统状态对比的仿真结果.仿真结果表明,路径跟踪系统在所提出的静态输出反馈控制器下横向位移和航向误差虽然较单车道下更大,但所有指标依旧控制在可接受的范围内,两个控制器产生的横向速度和横摆角速度相似.图12绘制了两个控制器的前轮转向角的仿真结果.同样,图13绘出了具有不同控制器的双车道变更的全局轨迹仿真结果,从图13中可以看出双车道相较于单车道的误差虽然较大,但也可以达到路径跟踪的要求.
由于在实际应用中,不可避免存在不确定性的情况,因此接下来对所提方法的鲁棒性进行验证测试.假定质量和转动惯量存在10% 的不确定性,汽车期望路径的道路曲率如图4所示.
AGV在纵向速度vx=15 m/s情况下的仿真结果如图14所示.由图14可见,在系统参数存在一定不确定的情况下,本文所提方法仍可以保证AGV具有良好的路径跟踪性能.

图12 双车道变更中前轮转向角Fig.12 Front steering angle in two lane changing

图13 双车道变更中汽车全局轨迹Fig.13 Global trajectory of the vehicle in two lane changing
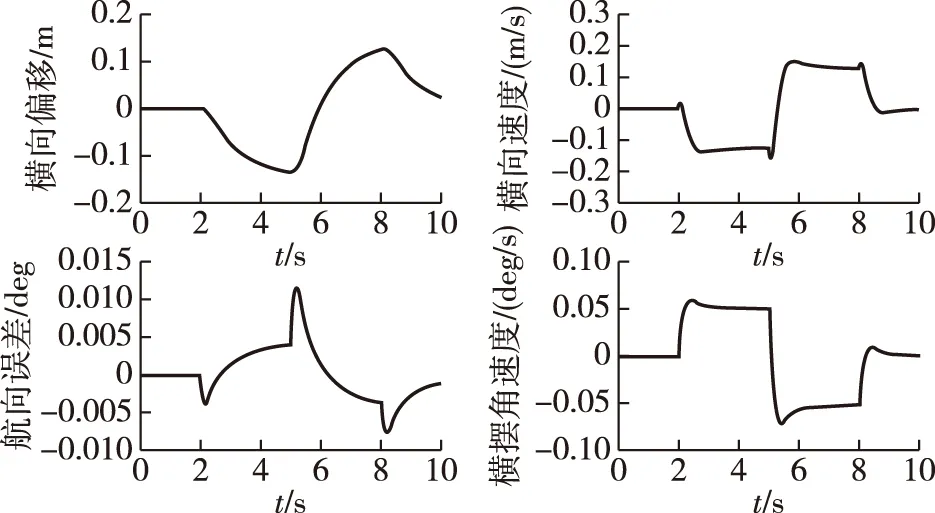
图14 参数不确定情况下的仿真结果Fig.14 Simulation results under uncertain parameters
4 结论
本文设计了一个新的静态输出反馈增益调度控制器来保证汽车的路径跟踪性能.为了避免复杂的迭代计算,使用两步法来设计速度依赖静态输出反馈控制器.该方法由两个阶段组成,第一阶段设计一个状态反馈控制器,然后把状态反馈控制器增益用于第二阶段的静态输出反馈控制器设计的计算.该控制器增益可以根据速度变化实时在线调节.考虑汽车时变纵向速度的影响,采用梯形多胞体描述车速相关的时变参数来降低控制器的保守性.最后通过试验仿真验证,汽车在车速时变的情况下,使用基于速度依赖的增益调度静态输出反馈控制器可以达到路径跟踪目的.在实际复杂3D环境下自主地面汽车路径跟踪控制可能还会面临动态扰动、数据时延或丢失等挑战,这都将在以后的研究中进行讨论.
猜你喜欢
心理学报(2022年10期)2022-10-12
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
电声技术(2020年7期)2020-12-16
电子制作(2019年19期)2019-11-23
中学物理·高中(2016年8期)2016-08-08