基于快速平行因子分解的声矢量传感器阵二维DOA 估计
2021-03-31 07:34陈未央张小飞
南京航空航天大学学报 2021年1期
陈未央,徐 乐,张小飞
(南京航空航天大学电子信息工程学院,南京211106)
阵列信号处理中的接收信号波达方向(Direc⁃tion of arrival,DOA)估计,近年来获得了广泛的关注和迅速的发展[1⁃3],而在水声信号处理中,新型的声矢量传感器也越来越多地被应用到信号参数估计中。声矢量传感器一般由声压传感器和振速传感器组成,相比于传统的信号接收传感器,声矢量传感器可以同时测量空间中某点声场的标量和矢量,即同步共点测量声场中一点处的声压和质点振速若干正交分量,具备较强的抗各向同性噪声干扰的能力[4],这些特点使得声矢量传感器阵列对于信号参数估计具有较大优势。
近年来,学者们已相继提出了许多关于声矢量传 感 器 阵 列DOA 估 计 的 算 法[5⁃11],包 括 多 重 分 类(Multiple signal classification,MUSIC)算法[5⁃6]、借助旋转不变性进行信号参数估计(Estimation of signal parameters via rotational invariance tech⁃nique,ESPRIT)算 法[7⁃8]、传 播 算 子(Propagator method,PM)[9],以及最大似然(Maximum likeli⁃hood,ML)算法[10]等。其中,基于子空间类的方法,如MUSIC 算法和ESPRIT 算法,通常要对接收信号协方差矩阵进行特征值分解,其计算复杂度较高。而PM 算法利用传播算子矩阵获得信号的参数估计,避免了接收信号协方差矩阵分解过程,其复杂度较低,但在低信噪比的情况下,该算法参数估计性能较差。
平行因子(Parallel factor,PARAFAC)模型最早于生理学中提出,用于对多维数据分析[12⁃13],近年来,该技术被成功地运用到了信号处理领域。文献[14]利用平行因子模型中的PARAFAC 分解方法,能够得到声矢量传感器阵列二维DOA 估计。然而传统PARAFAC 算法直接利用随机矩阵进行初始化,如采用高斯随机矩阵初始化,后进行循环迭代更新,直到分解收敛。但该过程所需收敛次数较多,迭代分解过程收敛较慢,导致算法计算复杂度很高,特别是在阵列阵元数较大或信号采样快拍数较大的情况下。
为了降低平行因子方法的复杂度,本文提出了一种适合任意矢量传感器阵列结构的基于快速PARAFAC 分解的二维DOA 估计算法。该算法首先将接收信号构建为平行因子模型,然后在数据域对该模型中的参数矩阵进行初始估计,最后利用三线性交替最小二乘(Trilinear alternating least square,TALS)算法[15⁃16]得到和信号一一匹配的仰角和方位角估计。所提算法基于减少迭代分解的次数、加快收敛速度的思想,对传统平行因子方法改进,对所构建的平行因子模型中的参数矩阵进行了初始化估计,大大加快了PARAFAC 分解的迭代过程。与普通的PARAFAC 算法相比,该算法复杂度较低。同时,其二维DOA 估计性能非常接近于PARAFAC 算法,同时优于ESPRIT 算法和PM 算法。
1 数据模型
假设有K 个远场信号被阵列所接收,其中信源数K 已知,阵列由M 个任意分布在三维空间中的声矢量传感器组成,其结构如图1 所示。

图1 信号接收阵列结构图Fig.1 Structure of signal receiving array
假设阵列所接收的信号均为非相干的窄带信号,所含噪声均为加性高斯白噪声,且与信号独立[14]。第k 个信号的波达方向为(φk,θk),其中φk为信号方位角,θk为信号仰角。则阵列中第m 个阵元在t 时刻的接收信号可以表示为[14]

式中:sk(t)为第k 个信源的传输信号;τm为相较于参考阵元,信号到达第m 个传感器的时延;nm(t)为接收噪声;hk为第k 个信源的方位矢量,表示信号在各个方向上的正交分量,可写为[4]
整个阵列在t 时刻的接收信号可以写为[14]

式中:“∘”表示矩阵的Khatri⁃Rao 积;A∈CM×K为整个阵列的方向矩阵[14];s(t)=[s1(t),s2(t),…,sK(t)]T为信源矢量;H =[h1,h2,…,hK]∈C4×K。则阵列J个快拍的接收信号可以表示为

式中:Dm(·)表示取矩阵的第m 行组成的对角阵,SJ×K=[s(t1),…,s(tJ)]T为 信 源 矩 阵;Nx=[n(t1),…,n(tJ)]为J 个 快 拍 的 信 号 噪 声;Xm=HDm(A)ST+Nxm(m=1,2,…,M ),其 中Nxm为切片噪声。Xm可以表示成平行因子三线性模型[15],即有

式中:am,k和hp,k分别为矩阵A 和H 的第(m,k)和(p,k)元素,sj,k为S 的第(j,k)元素,nm,p,j为噪声切片Nxm的 第(p,j)元 素;m=1,2,…,M;p=1,2,3,4;j=1,2,…,J。该结构还可以写成另外两种表达形式[14]

式中Ny和Nz为变换后相应的噪声。
2 二维DOA 估计算法
普通的PARAFAC算法通常直接利用三线性交替最小二乘算法对该模型进行分解。但该迭代分解过程收敛较慢,导致PARAFAC 算法计算复杂度较高。为了加快接收信号模型分解收敛速度,本文算法先在数据域对模型中的参数矩阵进行初估计,然后再利用PARAFAC分解得到信号的二维DOA估计。
2.1 参数矩阵初估计
式(4)中的接收信号,经过初等行变换可以表示为

式中:N′为变换后相应的噪声;G ∈C4M×4M为行变换矩阵,表示为
定义B=H ∘A,对矩阵B 进行分块

式中:B1∈CK×K;B2∈C(4M-K)×K。则存在一个矩阵P ∈CK×(4M-K)满足[9]


接收信号的协方差矩阵为

对R 进行分块得到

式中:R1∈C4M×K;R2∈C4M×(4M-K)。在无噪声情况下R1和R2满 足

可以通过求解下式的最小值来获得矩阵P 的估计[9]

式中‖ · ‖F表 示矩阵 的Frobenius 范数,通过 式(16)可以求得P 的估计为

得到P̂的估计后,可以得到矩阵P̂c=[ IK×K,P̂]T。对P̂c进行分块

式 中P1、P2、P3和P4均 为M ×K 的 矩 阵。则 根 据PcB1=B 以及B=H ∘A,有

根据式(19,20)可以得到P2B1=P1B1D2(H ),然后可得

式中:(·)†表示矩阵广义逆,对P†1P2进行特征值分解,其特征值即为D2(H )的估计值D2(Ĥ)。同时,可 以 得 到B1的 估 计 值B̂1,进 而 可 得B 的 估 计B̂=P̂cB̂1。将B̂进行分块可以得到
式 中B1、B2、B3和B4均 为M ×K 的 矩 阵。由 式(22)即可得到矩阵A 的初始估计Âini=B1。同时可以得到B3=B1D3(H ),B4=B1D4(H ),然后可以得到D3(H )和D4(H )的估计为

至此,已经获得了矩阵A 的估计Âini。同时,D2(Ĥ)、D3(H )和D4(H )的对角元素即分别为矩阵H 第2、3、4 行的估计,由于H 第1 行全部由元素1 组成,因此最终也可获得H 的初始估计Ĥini。
2.2 三线性分解与二维DOA 估计
三线性交替最小二乘算法是平行因子模型中常用的分解方法,该算法每次更新模型中的一个矩阵的估计,直到收敛。
通过式(4)可以得到最小二乘拟合为[14]

由式(25)可以得到S 的估计为

式中Â和Ĥ为上一次迭代所得到的A 和H 的估计值。
类似地,式(6)的最小二乘拟合为

由式(27)可以得到A 的估计为

式中Ĥ和Ŝ为上一次的迭代所得到的H 和S 的估计值。
同理,通过式(7)可以得到Ĥ的估计为

式中Ŝ和Â为上一次迭代所得到的S 和A 的估计值。
定理[16]考 虑 平 行 因 子 模 型 Xm=HDm(A)ST+Nxm(m=1,2,…,M ), 其 中 ,H ∈C4×K、A∈CM×K、S ∈CJ×K,3 个 矩 阵 的k 秩[15]分别为kH、kA和kS。如果

则S、A 和H 对于列交换和尺度变换是唯一的。
最终可以获得矩阵H 的估计为

式中:Π 为列模糊矩阵,Λ 为尺度因子,W 为估计误差。列模糊问题对角度的估计没有影响,尺度模糊则可以通过归一化方法解决。
对Ĥ进 行 归 一 化 后,设 其 第k 列 为ĥk,定 义rk=ĥk(2)+jĥk(3),则 可 以 得 到 接 收 信 号 的 仰 角和方位角的估计分别为
式中:arcsin(·)为反正弦函数,angle(·)表示取元素相角;k=1,2,…,K。上述过程中,由于仰角和方位角从矩阵Ĥ同一列中得到,因此所获得的二维角度已自动配对。此外,由于Ĥ中只包含信号的角度信息,与阵元位置无关,因此本算法能够应用于任意结构的声矢量阵列。
2.3 算法步骤及复杂度、优点分析
上述已经给出了基于快速PARAFAC 分解的二维DOA 估计算法,其主要步骤总结如下:
(1)计算接收信号协方差矩阵,并根据式(14)对协方差矩阵进行分块,然后通过式(17~24)获得矩阵A 和H 的初始估计;
(2)根据式(26,28,29),重复地更新矩阵S、A 和H 的估计值,直到收敛;
(3)根据所获得的H 的估计值,通过式(32,33)得到接收信号的方位角和仰角估计。
对于本文所提算法,参数矩阵初估计过程计算复 杂 度 为O {16M2(J+K )+14K2M +4K3},单次迭代分解过程复杂度为O {3K3+K2(J+M+4)+6K2(4M+JM+4J )},因此所提算法总的复杂度为O {16M2(J+K )+14K2M+4K3+n(3K3+K2(J+M+4)+6K2(4M+JM+4J ))}。其 中n为分解迭代次数。图2 和图3 分别为本文所提算法与PARAFAC 算法的收敛速度对比图以及在不同的快拍数下计算复杂度对比图。从图2 和图3中可以看出,所提算法加快了迭代分解过程,计算复杂度大大降低。

图2 迭代分解收敛速度对比Fig.2 Comparision of decompisition convergence rate
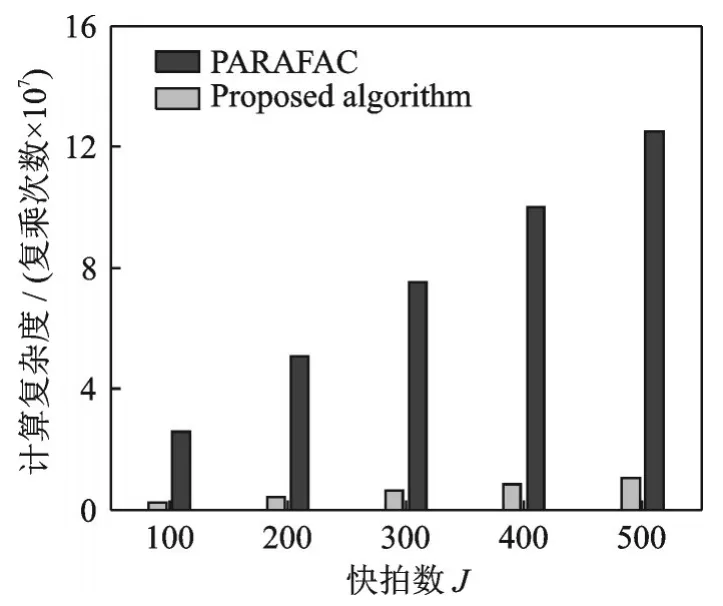
图3 计算复杂度对比Fig.3 Comparision of computational complexity
本文所提算法有如下优点:
(1)本文所提算法能够应用于任意结构的声矢量阵列,同时能得到配对的二维DOA 估计;
(2)本文所提算法借助于矩阵的初估计过程,加快了分解收敛速度,降低了算法的复杂度;
(3)本文算法角度估计性能非常接近于PARA⁃FAC 算法,同时优于ESPRIT 算法和PM 算法。
3 仿真结果
根据前文描述的算法原理及应用场景,本节通过MATLAB 仿真验证本文所提算法的有效性。在仿真中,假设有3 个不相干的远场信源发射的信号,被声矢量传感器阵列所接收,信号波达方向分别 为 (φ1,θ1)=(10°,15°),(φ2,θ2)=(20°,25°) 和(φ3,θ3)=(30°,35°)。M、J 分别为阵元数和快拍数。仿真中,采用L 次蒙特卡洛仿真来评估算法的角度估计性能,定义角度估计的求根均方误差(Root mean squares error,RMSE)为
式中:φk、θk分别为第k 个信源的准确方位角和仰角;和分 别 为 第l 次 仿 真 中φk和θk的 估 计值;L 为仿真次数,仿真中L 取1 000。
图4 为本文所提出的算法在信噪比(Signal noise ratio,SNR)为15 dB 下仿真100 次的估计结果分布图。仿真中阵元数M=15、快拍数J=200。从图4 可以看出本算法可以有效地用于声矢量传感器阵列的二维DOA 估计。图5 为本文算法与PARAFAC 算 法[14]、ESPRIT 算 法[8]以 及PM 算法[9]角度估计性能对比仿真结果。仿真中M=10,J=200。从图中可以看出,所提算法角度估计性能非常接近于PARAFAC 算法,同时优于ESPRIT算法和PM 算法。
图6 给出了本文算法在不同阵元数下的仿真结果,仿真中快拍数J=200。从图6 可以看出,该算法性能随着阵元数M 的增大而提高,其原因是阵元数的增多提高了空间分集增益。图7 为本文算法在不同快拍数下的仿真结果,仿真中阵元数M=14。从图7 可知,该算法角度估计误差随着快拍数的增大而减小,其原因为快拍数增大提高了时间分集增益。
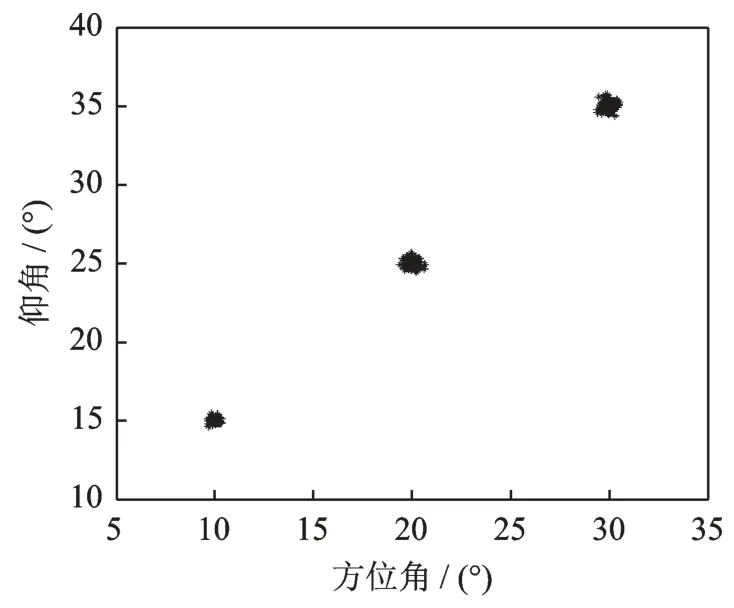
图4 本文所提算法角度估计结果Fig.4 Angle estimation of the proposed algorithm

图5 不同算法的角度估计性能对比Fig.5 Comparison of angle estimation performance of dif⁃ferent algorithms
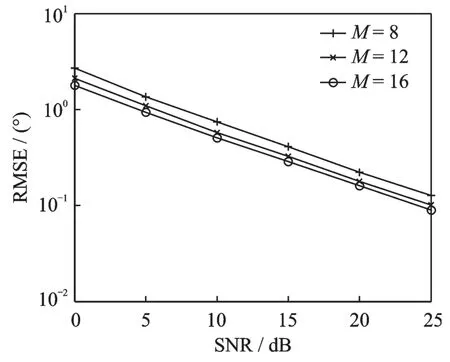
图6 本文算法在不同阵元数下的角度估计性能Fig.6 Angle estimation performance under different M of the proposed algorithm
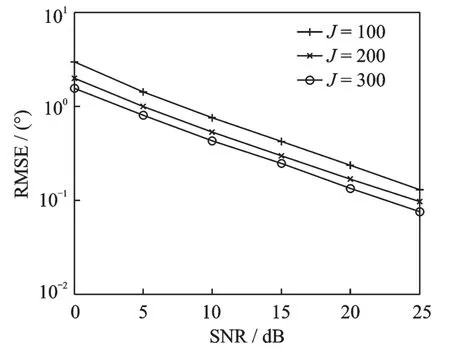
图7 在不同快拍数下的角度估计性能Fig.7 Angle estimation performance under different J of the proposed algorithm
4 结 论
针对任意结构的声矢量传感器阵列中的二维DOA 估计问题,本文提出的快速PARAFAC 分解算法,能够以较低的计算复杂度得到接收信号匹配的二维DOA 估计。仿真表明,该算法的二维角度估计性能接近于PARAFAC 算法,同时优于ES⁃PRIT 算 法 和PM 算 法。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
北京航空航天大学学报(2021年9期)2021-11-02
密码学报(2021年4期)2021-09-14
中学生数理化·高一版(2021年11期)2021-09-05
成都信息工程大学学报(2021年6期)2021-02-12
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
劳动保护(2019年3期)2019-05-16
航空世界(2018年12期)2018-07-16
新高考·高一物理(2016年1期)2016-03-05