
基于三维滤波的红外弱小目标检测技术研究
2021-04-02 03:43武文波檀朝彬
电子技术应用 2021年3期
樊 华 ,武文波 ,焦 智 ,檀朝彬
(1.北华航天工业学院 电控学院,河北 廊坊065000;2.北京空间机电研究所,北京100094)
0 引言
本文基于红外图像样本进行研究,由于红外相机是利用了物体所发出的红外辐射来成像的,因此红外成像系统可以实现全天候工作,并且相较雷达系统能更好地识别隐蔽性高的目标。但是红外图像中的目标无任何纹理特征信息,背景环境过于复杂时,信噪比低的目标很可能就会隐没在背景当中。如何在红外图像中更好更准确地检测出目标一直以来都是一个十分具有研究意义的热点问题[1]。 很多检测方法在提升检测率的同时又造成虚警率升高,将噪声误当成目标检测了出来。 在运动目标的检测上帧差法的应用比较普遍,帧差法可以很好地区分出运动与静止的信息,同时算法的复杂度不高,但是它对样本品质有一定的要求,对信噪比低的图像检测效果往往不是很理想。 本文提出了一种改善方法,可以使帧差法在图像信噪比不高的情况下,也能达到很好的检测效果。
由于图像噪声在小波域的分布较为集中,利用三维小波变换进行样本的预处理,通过时间空间上的三维滤波,结合了样本的帧间信息,实现了降低背景灰度值抖动、提高样本信噪比的效果。 并且基于运动目标具有轨迹性的原理做出判断,这样可以实现在保持高检测率的同时又降低误检的发生。
1 红外小目标自适应检测与跟踪方案
红外图像的目标检测一般分为单帧检测和帧间检测两大类,单帧检测的算法一般都是基于目标与背景显著的灰度值差异进行检测的,如文献[2]~[4]中提到的算法,是基于主成分的核范数算法PSTNN(Partial Sum of the Tensor Nuclear Norm)通过目标和背景的灰度值差异将红外图像分成一个稀疏矩阵和低秩矩阵从而将目标与背景分离实现目标检测。但复杂的背景环境会使低信噪比的目标会隐没在其中,所以单帧检测的方法有时效果并不理想。
帧间检测的算法分为跟踪前检测[5-6]和检测前跟踪两类[7-8]。 跟踪前检测在信噪比低时效果不是很好,容易出现误检、虚警的情况。 检测前跟踪常用到的方法有粒子滤波方法[9]、贝叶斯估计[10]、管道滤波方法[11]及卡尔曼滤波[12]等。
本文以图1 所示的样本进行实验,由于背景灰度值起伏变化比较大,因此先对样本序列进行预处理,得到较为平稳的图像背景,为接下来的检测做准备。 可以从实例中看出样本的背景环境较为复杂,目标物的信噪比较低,如果使用单帧检测的方式很容易出现漏检和误检的状况。 而拍摄角度基本不变的情况下,利用样本的帧间信息能够更好地选出目标,所以选用图像序列的帧差法作为检测方法。 在某些帧中目标的灰度值比较低,使用较高的阈值很容易造成漏检的情况,而低阈值又会出现虚警。在使用帧差法选出备选点之后本文对目标是否具有轨迹性进行判断,剔除伪目标,完成检测。
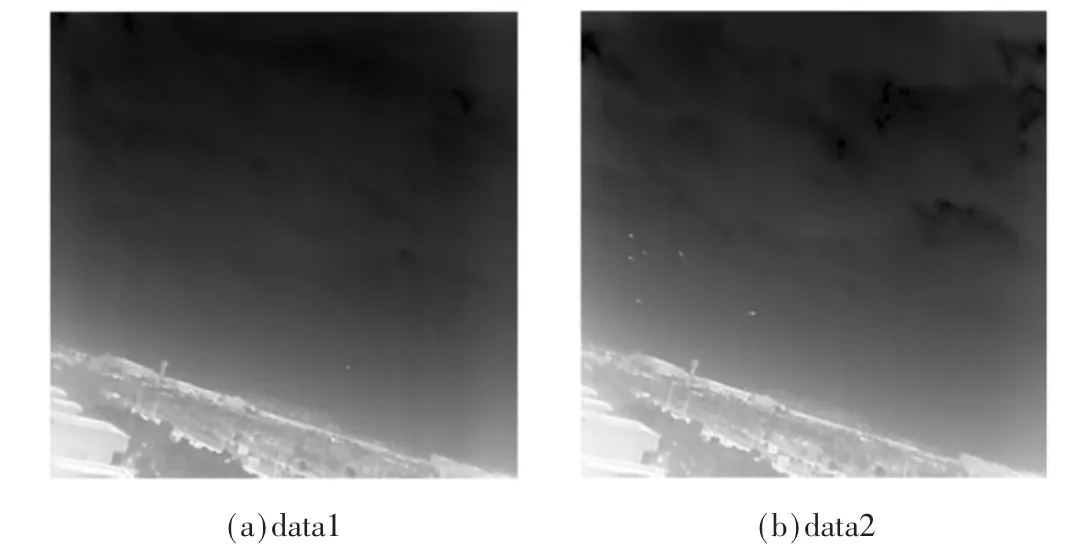
图1 样本实例
2 红外序列图像预处理
2.1 图像预处理方法
在红外图像序列中,不同帧的背景环境可能会发生明暗变化,如果这些变化过大可能会影响之后的检测结果,误将背景噪声当作目标检测出来,所以在检测之前先要对样本序列做预处理工作。常用的红外图像预处理方法有频域高通滤波、空域高通滤波、中值滤波、数学形态学滤波、邻域最小差值滤波等。 对比上述几种滤波方法从效果上来看在图像背景起伏增强时,中值滤波达到较好的效果,但由于改变信号幅值能量的方式基于传统的物理性质模型,并不能与视频图像的几何特点很好地匹配,因此传统的滤波方式容易造成图像模糊、细节丢失的问题。因此本文采用一种小波滤波的方式作为预处理的方法。利用噪声一般集中分布在小波中高频段部分的原理,使样本在小波滤波预处理之后实现降噪的同时较好地保有细节信息。
2.2 三维小波变换
在小波滤波对视频图像降噪处理方面,有二维小波变换与时域滤波相结合的方式和基于三维小波分解-阈值去噪-三维小波重构过程实现的三维小波滤波方式[13-14]。二维小波变换方式只考虑到了空间上的信息,而时间上的信息往往对于帧间检测具有更大的价值。三维小波变换通过单帧样本空间上的二维信息与时间方向上的一维信息相结合的方式,可以更全面地利用样本中的信息,达到更好的滤波效果。三维小波滤波的方式一般分为两种:一种是先通过时域上的小波一维变换,再从空域上进行二维小波变换(x 方向小波变换,y 方向小波变换);另一种是先进行空域上二维变换,再进行时域小波一维变换[15]。
将红外图像序列看作一个三维空间数据集V:

其中Vm为尺度函数,Wm为小波函数,⊕表示空间并集。
图2 为三维小波一级变换流程,其中h 为尺度上的低通滤波器;g 为小波上的高通滤波器,其相互正交。 经过三级三维小波变换后,得到22 组子带。再得到经过阈值滤波去噪后的结果,然后三维小波重构得到去噪后的红外图像序列。
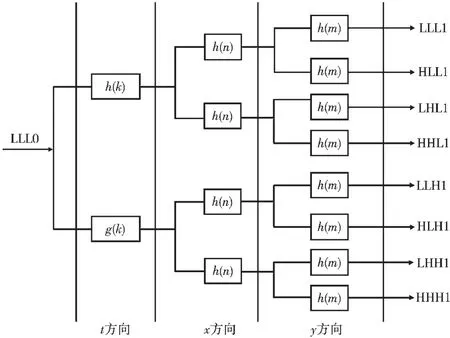
图2 三维小波变换
2.3 阈值选择
在阈值滤波方面,利用了信号中有用信息的小波系数往往较大,而噪声的小波系数较小的原理,通过小波阈值去噪的方法达到降噪的效果。一般小波阈值去噪法分为硬阈值和软阈值。硬阈值是使用将阈值内的小波系数全部置零的方式,这样可以最大程度上去除噪声,但是会在一定程度上对信号造成损伤;而软阈值去噪是将阈值内的小波系数全部置零,在阈值之外的小波系数做特殊处理:小于-λ 的统一加λ,大于λ 的统一减λ(λ 为选定好的阈值)。 经过软阈值去噪处理,图像背景就会变得比较平滑了,可以改善硬阈值造成的小波域的突变和局部抖动。
硬阈值去噪法:

软阈值去噪法:

本文使用软阈值的方法结合图像信噪比对阈值进行选取,通过设定信噪比S,并由信噪比得到期望值,将期望值设置为阈值。认为小波分解系数在阈值以下的部分为噪声。 图像信噪比公式如式(5)所示:
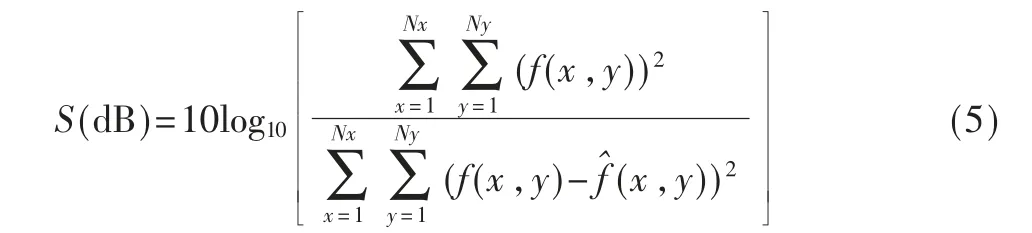
依据以上公式可以将图像信噪比看作是图像期望与标准差之比,所以期望可以通过式(6)得到。

接着进行三维小波分解-阈值去噪-重构,得到较平滑红外图像序列,为下一步目标检测做准备。
选取某一背景像素点在连续40 帧的灰度值变化(横坐标为帧序号,纵坐标为灰度值),图3 为经过三维小波阈值去噪后的结果与原始信号的对比图,可以看出使用本文的滤波方法后的序列图像背景变得更加平稳。由于红外相机接收到的红外辐射会发生变化,造成了背景的变化,大幅度的背景变化可能会在接下来的目标检测中造成比较大的影响,产生误检虚警的情况。 而在经过三维滤波之后就可以很好地改善这种情况。
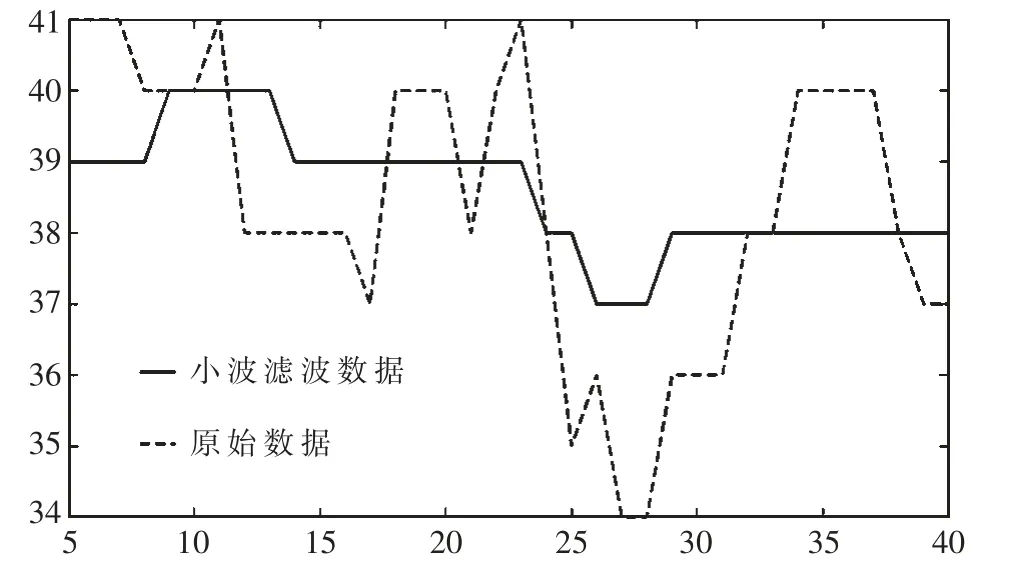
图3 三维小波去噪前后对比图
3 红外目标检测
因为样本背景环境较为复杂(不单单是天空,还有地面、建筑物,公共设施等多重要素),基于目标和背景灰度值差异的单帧检测算法虽然较为简单,但是极其容易出现虚警,所以本文采用另外一种思路,利用目标在帧间的信息变化来区分目标与背景。该算法将图像序列的第k 帧图像看作是:其中Fk(x,y)是k 帧图像中的运动目标;Bk(x,y)为图像背景;nk(x,y)为噪声。

帧差法可以有相邻帧做差或当前帧与前n 帧做差计算。 这主要取决于目标运动的速度,若目标运动缓慢采用相邻帧做差可能会出现漏检的情况,此时就应采用相隔n 帧的图像进行差值运算(n 的取值应由目标运动速度确定);而如果目标运动速度过快的话,在之后的跟踪步骤中可能无法识别其运动轨迹从而将其判别为伪目标剔除,同样会造成漏检。 所以用帧差法检测目标时对目标运动速度有所要求,最理想的匀速运动可以达到最好的检测效果。
帧差法公式为:

将帧间差分得到的结果进行阈值二值化处理。 其中阈值的选择会影响是否选取该点作为备选点。如果阈值选取得过高,当目标微弱、信噪比低的情况下会出现漏检的情况;若是设置的阈值过低又会出现备选的中的噪点过多,造成检测效果下降。 所以阈值应结合具体图像的信噪比进行选择,信噪比高的图像可相应提高阈值,信噪比小的则要设置较低的阈值。
检测结果如图4 所示,对比单帧检测的方法可以发现,在背景相对复杂的情况下单帧检测很容易将噪声误检为目标,效果与帧差法有较大差距。
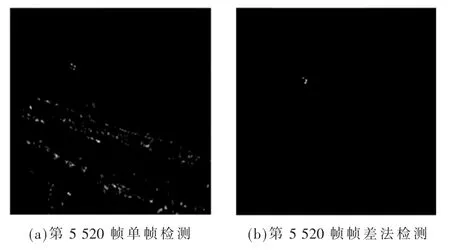
图4 单帧检测与帧差法对比图
不同样本帧差法检测对比如表1 所示,根据表1 可以看出在信噪比低的情况下检测效果并不令人十分满意,会出现明显的误检。 这是由于目标信噪比低以及背景环境的变化,或者相机接受红外辐射的情况发生了些许变化而导致的偏差,误将背景检测成了运动目标。 因此还需要对备选点进行验证,剔除伪目标,实现更加精确的检测。
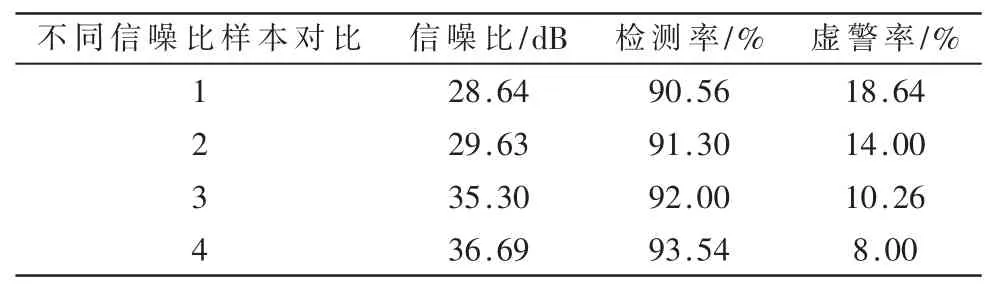
表1 不同样本帧差法检测对比
4 验证备选目标
4.1 剔除伪目标点
上文已经提到帧差法检测出的候选目标点中包含了一些误检出的背景噪声点,基于真正的目标必然有其相应运动轨迹的原理,利用所检测的目标位置周围一定范围内在其相邻帧(或相隔n 帧,取决于帧差法检测时所间隔的n 帧)是否存在目标,来判断该目标点为正确检测或是要剔除的伪目标点,这样就实现了验证备选点的效果。
本文设计了一种目标轨迹验证的方式,在帧差法检测结果的基础上定义了局域灰度概率来判断所选目标是否为具有轨迹性。 步骤如下:
(1)根据帧差法所选出的候选目标点,得到其位置坐标。
(2)计算相邻n 帧的该坐标位置周围边长为r 的正方形的局域灰度概率值。
(3)设定阈值,将局域灰度概率值在阈值以下的点认为是伪目标点,剔除伪目标点。
具体方式为:
其中s 为阈值。 阈值s 与矩形边长r 的选择要根据具体样本确定,比如样本目标比较小时,不应将阈值或r 选取过大,否则该目标点的局域灰度值就会小于所设定的阈值,造成把真目标认为成噪声错误剔除。 同样r 的选取也与目标运动的速度有关,目标在相邻检测帧中应位于局域矩形框内部。 所以如果目标运动速度较快,相应的r 值选取也应较大。
4.2 红外小目标检测跟踪结果
将所检测出的目标在每一帧上进行标记,红外视频图像中某4 帧的检测结果如图5 所示。对比帧差法和基于主成分分析的单帧检测算法可以发现,单帧检测的方法更加容易出现虚警和漏检的情况。所以在环境复杂背景下,运动的红外小目标使用帧差法要更胜一筹。
检测情况分析如图6 所示。 本文所用检测方法在样本检测中检测率为93.97%, 虚警率为6.4%。 而使用基于主成分分析的方法检测率为65.31%,虚警率为13.51%。对比后可以看出本文所采用的方法能更加可靠有效地完成红外弱小目标的检测跟踪。
5 结论
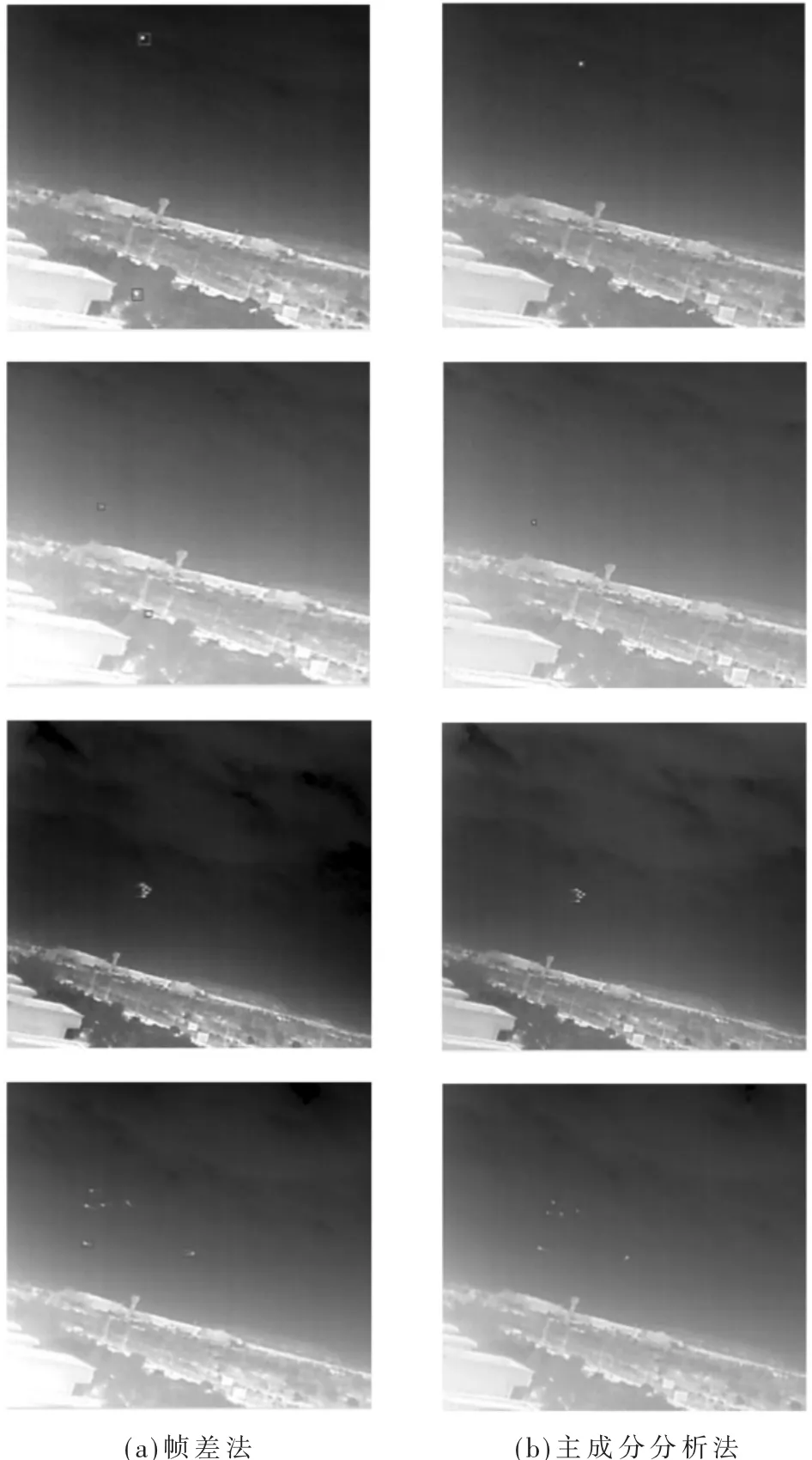
图5 检测结果对比
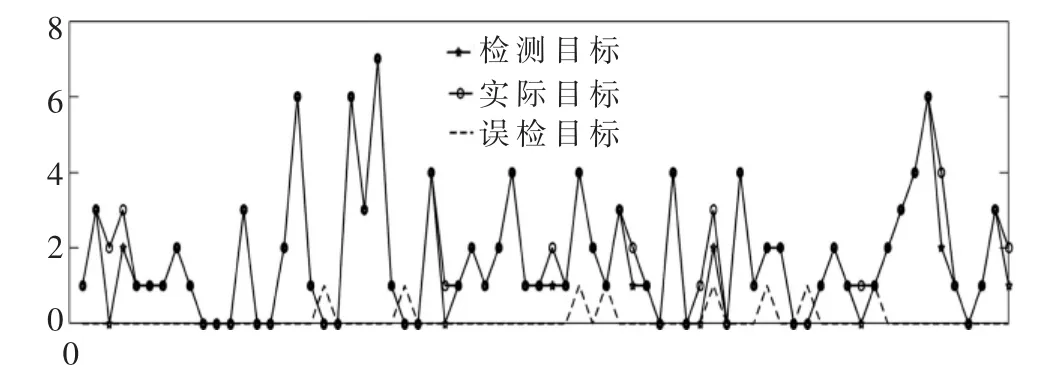
图6 检测情况分析
随着背景环境的复杂度增加,一些传统方法的检测率会出现大幅度的下降。对比其他比较单纯的目标检测方法,本文所提出的三维滤波处理的方法,结合运动轨迹验证,可以在保留高检测率的情况下,很大程度上减少误检状况的发生,很好地解决了低信噪比样本中帧差法检测效果不理想的问题,在复杂环境中也能实现令人满意的检测效果。但因为帧差法对目标的运动情况有一定的要求,对于静止的目标,或是速度起伏较大的运动目标检测效果会大打折扣。 在这方面还有待进一步改进。
猜你喜欢
环球时报(2022-05-23)2022-05-23
现代仪器与医疗(2022年1期)2022-04-19
河北理科教学研究(2021年3期)2022-01-18
金桥(2021年4期)2021-05-21
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年7期)2019-04-25
中国交通信息化(2018年6期)2018-08-29
雷达学报(2017年3期)2018-01-19
中学物理·高中(2016年12期)2017-04-22
光学精密工程(2016年3期)2016-11-07
