牵引加榴炮瞄准机手轮尺寸人机工效评估与优化
2021-04-08 04:48赵祎乾吴天宇顾森李清晨李亚军
兵工学报 2021年2期
赵祎乾, 吴天宇, 顾森, 李清晨, 李亚军
(1.南京理工大学 机械工程学院, 江苏 南京 210094;2.河南机电职业学院 智能工程学院, 河南 郑州 451100)
0 引言
牵引加榴炮与自行火炮相比具有质量轻、研制与维修成本低、结构简单可靠、不受限于电气等自动化技术从而具有广泛的适用范围,在未来战争中仍发挥重要作用[1]。传统牵引式火炮的研发、设计、装配、使用中重点关注各元件性能参数,易忽略对炮手生理、心理特征的研究,然而火炮效能不仅取决于元件性能的优劣,而与操作中视、听、触、行为通道的人机交互紧密关联。若缺乏对人机工效的认知与研究将会降低炮手操作效率、舒适度、可靠性,影响火炮的作战效能[2-4]。
面向人机工效层面对火炮操作的研究具有重要意义。文献[3]为提升火炮瞄准效率,对瞄准机手轮安装位置、空间范围、操作力等要素探讨并提出优化建议。文献[2,4]先后以某型车载速射迫击炮和加榴炮瞄准机手轮工效分析为目标,依托人机仿真技术依次探究了手轮安装高度、转动频率、转动方式等对炮手操作姿势的影响。文献[5]对某型火箭炮乘员舱设计中方向盘高度、面板倾斜角度评估并提出改进措施。文献[6]提出一种面向舰炮瞄准装置单兵操控台界面的优化设计模型。文献[7]基于主成分分析法从指标层对舰炮武器人机交互绩效评估。文献[8]采用人机仿真技术探究了车载炮瞄准机手轮安装方式并提出优化设计策略。文献[9]针对车载炮装填过程中的工效评估,由此设计了辅助装填装置。文献[10]立足于人体生物力学视角下评估了战车主炮装填中炮弹质量、装填角度与高度对装填手操作姿势的影响,确立了弹药架最优位置。文献[11]从工效优化层面梳理并归纳自行高炮乘员舱室内诸设备的设计原则。综上研究主要聚焦于火炮瞄准操作的工效评估。牵引加榴炮通常采用手动或半自动瞄准方式,即炮手操控高低机、方向机手轮调整炮口的高低角与方位角[8]。已有多篇文献[2-4,8,11]针对瞄准机手轮安装位置、轴线高度与夹角、转动方向与频率、操作力等要素展开研究,相比之下对轮径、安装轴线高差、握柄直径的探讨尚不多见,而上述要素将进一步影响炮手操作姿势、舒适度与工效。
轮径、安装轴线高差尺寸与炮手上肢操作姿势及躯干载荷相关,涉及动态行为评估。由于瞄准机制造精度要求与成本较高,实物样本加工难度较大,本研究依托于人机仿真技术,模拟炮手操作手轮动态行为,并结合多指标决策层面对操作姿势展开评估。手轮握柄截面直径影响炮手抓握舒适度,考虑到握柄与手掌之间接触面较小,若采用压力、生理电信号采集等实验方案,测试中设备易干扰手指灵活性从而产生误差,且实验结果的准确性受技术影响较大,采用人机综合评价方法,构建科学、系统的评价方法体系由此对多组握柄实物抓握与评价。
通过人机仿真评估、综合评价依次探求轮径、安装轴线高差、握柄截面直径的最优参考范围,指导优化设计,旨在提升炮手操作人机工效与舒适度。
1 人机仿真评估
1.1 评估内容与方法
仿真评估以人机仿真软件Siemens Tecnomatix Jack 9.0为工具,需构建数字人体模型,导入或建立评估对象模型,针对数字人完成相应任务时操作行为仿真并输出有效的评估信息[8]。
某型牵引加榴炮高低机手轮轴线与火炮耳轴平行,方向机手轮轴线与之垂直且轴高相对较低约为1 050 mm,二者轮径相同均可正反转。炮手左、右手分别操作高低机与方向机手轮,操作力依次为68 N与46 N[12]. 依据3种标准的轮径与4种规格的轴线高差尺寸建立共计12组样本(见表1)。
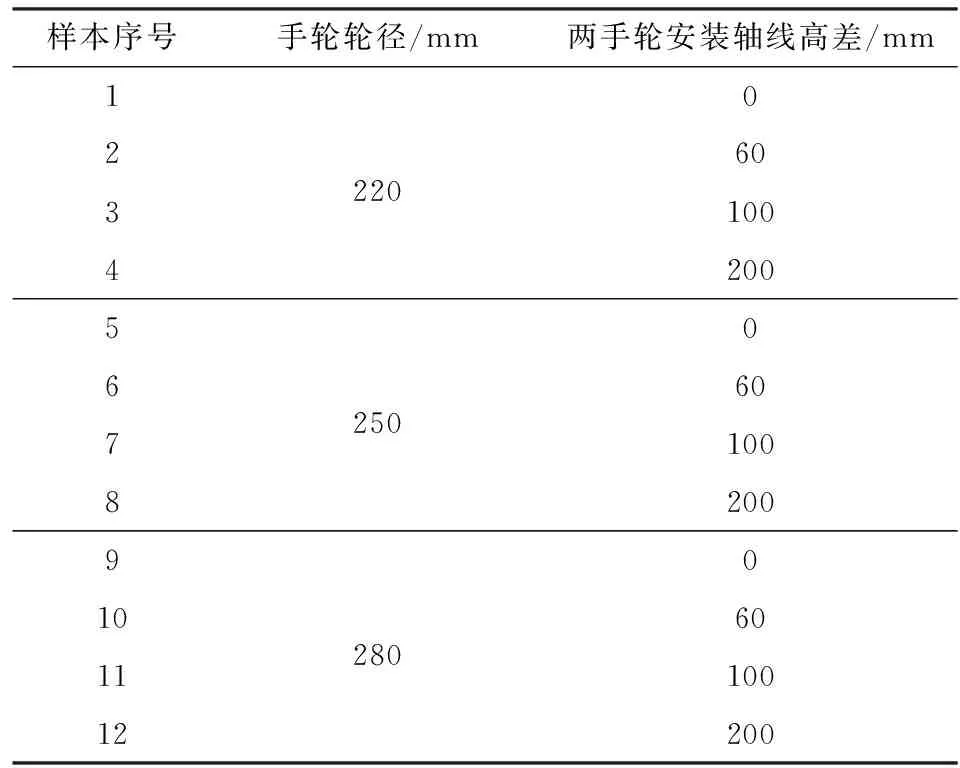
表1 仿真评估样本参数
常用的工效评估指标包括操作可达域分析、快速上肢评价[13]、下背部分析[14]、工作姿势分析系统[15]、人体受力分析[16]等。手轮操作涉及手掌、手腕、前臂、肘部、上臂、肩部、躯干等部位,由此筛选并明确评估指标包含可达域分析、快速上肢评价、下背部分析、人体受力分析4项。本次仿真评估中创新及优势包括:1)样本参数易修改,针对炮手操作手轮过程的典型姿势进行评估,保证结果科学与可靠性同时大幅压缩成本,体现仿真技术在武器等复杂装备研究中的优势。2)采用包括受力分析等多项指标依托于肢体关节偏转角度、扭矩、压力与肌肉负荷等多维度全面与细化地对炮手操作姿势评估,有效规避单一或少量指标下评估结果的局限性。3)依托于评估逻辑与方法梳理并尝试建立面向人体动态操作行为的评估方法体系,以期实现对操作姿势的定量评估。4)提出采用灰色关联分析(GRA)与逼近理想解排序(TOPSIS)相结合的计算方法对单项指标下的评估数据处理与分析;针对多项指标下的综合评估数据进一步结合灰色接近关联度计算以提升评估结果的精确性,有助于多组样本的优劣排序。
1.2 评估过程
1.2.1 手轮与炮手数字化模型构建
参照瞄准机各元件布局关系及样本参数,在三维建模软件Pro/Engineer中建立1∶1手轮数字化模型并导入Jack软件中进行坐标变换。本次炮手建模采用高级模块,以国家军用标准GJB2873—2002[17]中具有代表性的第50百分位(P50)男性人体尺寸为参考,并采集20名真实炮手尺寸对其适当修正。
1.2.2 炮手操作行为仿真与评估
仿真中规定握柄位于手轮旋转中心点竖直正上方为初始位置(角度0°),顺时针转动为正角度方向、逆时针为负。为捕捉炮手上肢极限与典型操作姿势,设定双手同时转动两手轮,方向相反且角速度与线速度均相同,以360°为周期等距提取8个评估参考点,各参考点下高低机、方向机手轮转动角度依次为0°、-45°与45°、-90°与90°,以此类推。
(1)

(2)

(3)
(4)
(5)
Q值越接近1则比较序列与正理想解越接近,整体越优。由Q值可对同项指标下样本优劣排序。考虑到各项指标的评估方法、原理、标准、量纲之间有所差异,造成样本在多指标下优劣排序可能不一致,运用灰色接近关联度方法[20]对多项指标下样本的灰色关联贴近度数据计算得出综合评估结果。假设比较序列与参考序列依次为Sc、Sd,
(6)
式中:|Sd-Sc|为序列Sc与Sd之间接近程度;Sc(m)与Sd(m)依次为序列Sc、Sd中第m项数据。灰色接近关联度ρcd计算公式为
(7)
ρcd值越大,表示Sc与Sd越接近,则对应样本综合评估结果越优。
1.3 评估结果分析与讨论
1.3.1 操作可达域分析
设备操作中人肢体末端所能达到的三维空间范围称为可达域[21]。本节依据炮手实际操作姿势选择双肩肩周驱动的上肢可达域,以P50炮手操作12组样本的左右手掌心为行为轨迹点创建可达域包络范围。结果表明,炮手操作周期中右手均在可达域范围内,除样本3、样本4、样本8之外其余样本操作中左手均略超出可达域,炮手需弯腰或前倾躯干完成操作。
1.3.2 快速上肢分析
快速上肢分析以人体姿势、肌肉使用、负荷、任务持续时间与频率为依据针对手腕、手臂、颈部、躯干、腿关节等部位的评价来判断操作姿势的合理性[13]。根据生物学原理将各部位的评分叠加得出表征舒适度的等级,评分共计7分,划分为4个等级:1~2分属1级;3~4分属2级,以此类推。分值越高表示姿势偏离标准的程度越大,需调整或改变的时间间隔越短。统计12组样本的快速上肢分析数据,如表2所示。

表2 炮手操作12组样本对应快速上肢分析评估结果
由表2可知,评估数据均隶属于4~7分范围,对应2~4级,表明各样本在长时间操作中均需调整姿势。其中:样本3、样本6、样本10在参考点4位置;样本11在参考点2位置;样本12在参考点1、参考点3、参考点8位置;样本7由参考点3至参考点4区间;样本9由参考点2至参考点4区间评估结果均为7分,炮手应立即改变操作姿势以避免上肢受伤。对数据无量纲化并依据(1)式~(5)式计算灰色关联贴近度Q(见表3)。

表3 快速上肢分析指标下12组样本灰色关联贴近度
由表3可知:样本5的灰色关联贴近度相对最高,操作中上肢姿势合理,该项指标下评估结果最优;样本12最低,评估结果最差。统计各参考点下12组样本评估数据的均值依次为6、6.17、6.25、6.42、5.58、5.25、4.92、5.83,由此对操作周期中评估结果的变化规律探讨:手轮由参考点1转动至参考点4、由参考点7再次转回至参考点1过程,评估值依次提升约6.95%与22.03%;手轮由参考点4转动至参考点7过程,评估值降低约23.38%。面向操作姿势层面,依据快速上肢评价原则[13],对样本评估结果之间的差异及操作周期中数据变化规律的成因讨论,由于数据量过大,本处以较典型的样本9与样本12为例,提取矢状面下炮手上肢操作姿势(见图1与图2)。此外快速上肢评价受上臂、下臂、手腕掌背侧屈、扭转角度的影响,同时统计2组样本在参考点1位置以上各部位评估结果(见表4)。

表4 炮手操作样本9与样本12在参考点1位置上臂、下臂、手腕部位评估结果
炮手操作中右手臂相比较于左手臂动作幅度小,对评估结果影响较弱,则本处以左手臂姿势为重点展开讨论。参照图1(a)~图1(h)、图2(a)~图2(h),设炮手左上臂与躯干中心线夹角为α,左下臂与上臂中心线夹角为β,左手腕掌背侧屈角度为δ. 由图1(a)、表4可知:样本9在参考点1位置,α约为40°且右上臂几乎不偏转,依据上臂评估标准,结合操作频率、负载情况记为2分;β约为59°,属于0°~60°区间,结合右下臂偏离标准的范围记为2分;δ约为-22°,参考手腕掌背侧屈评估标准,大于±15°范围记为3分;右手腕存在扭转记为2分。同理参照图2(a)、表4,炮手操作样本12在参考点1位置,α约为55°、β约为78°、δ约为-29°,即上臂、下臂、手腕掌背侧屈、手腕扭转记分依次为4、3、3、2. 综上参考点1位置样本12对应的α、β、δ角度均大于样本9,表明上肢偏离标准姿势的幅度相对较大,则快速上肢评价分数与等级也相对较高,表2中以上2组样本对应数据依次为5分与7分,与讨论结果一致。
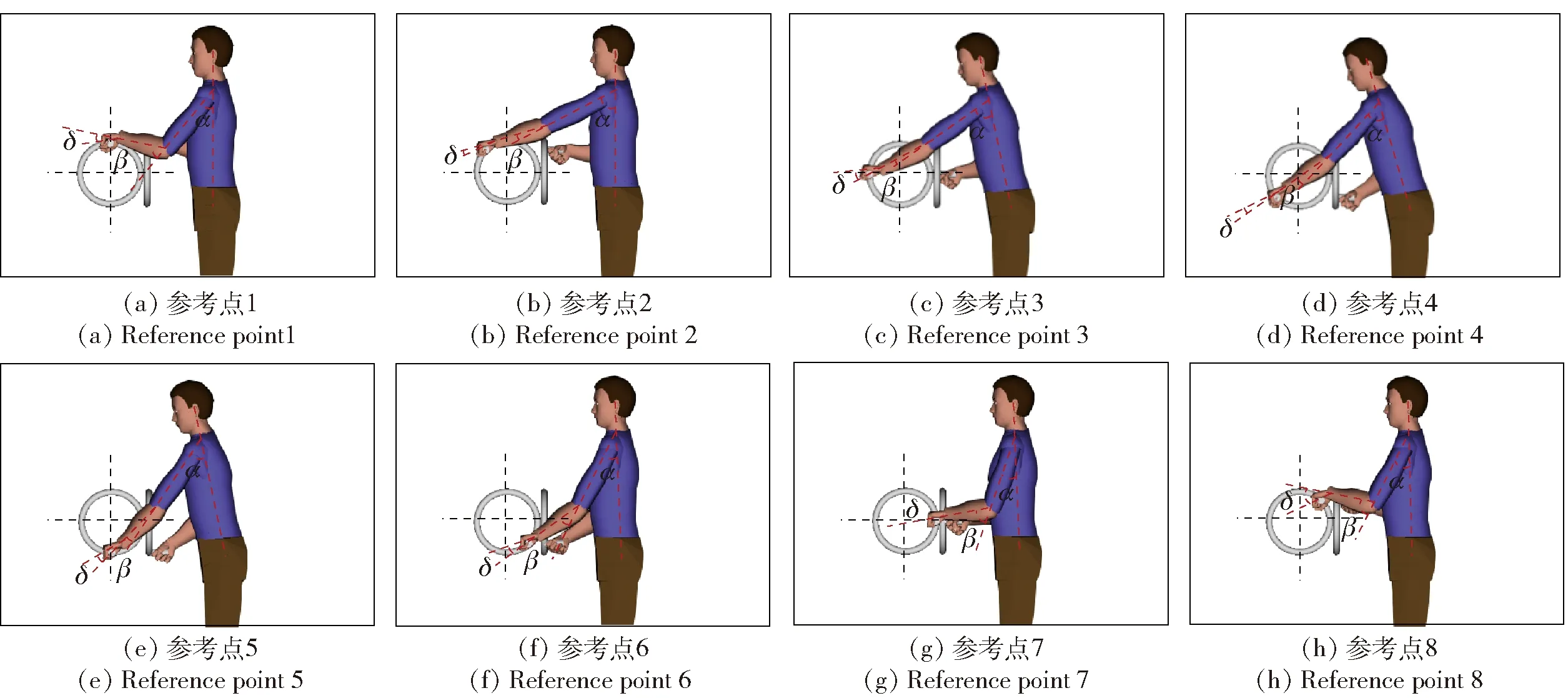
图1 矢状面视角下样本9在各参考点对应炮手上肢操作姿势Fig.1 Postures of upper limb at each reference point in sagittal view when gunners operate the ninth group of sample

图2 矢状面视角下样本12在各参考点对应炮手上肢操作姿势Fig.2 Postures of upper limb at each reference point in sagittal view when gunners operate the twelfth group of sample
参照图1(a)~图1(d)与表2:样本9操作中手轮由参考点1转动至参考点4,α角度依次为40°、63°、66.5°、59.5°,即先提升约66.25%、再略降低约10.53%,左上臂总体逐渐偏离标准姿势;β角度依次为59°、10°、8°、11.5°,左下臂逐渐偏离60°~100°标准范围;左手腕由于掌背侧屈使腕部受到压迫;右手腕扭转角度逐渐增大;手轮握柄位于旋转周期中较低位置,造成炮手操作时躯干前倾致使背部肌肉拉伸,评估分数则逐步提升。同理可对手轮由参考点4转动至参考点8过程中评估结果变化规律的成因讨论。综上讨论结果符合表2中数据的规律。
1.3.3 下背部分析
下背部分析主要针对人体特定操作姿势下脊椎受力研究,将结果与美国国家安全与健康协会(NIOSH)提出的标准[22]对比,若超过标准中推荐值3 400 N表示相应操作会提升部分操作员背部受伤的概率,若超过极限值6 400 N表明相应操作会造成大多数操作员背部受伤[16]。以手轮力为参照对炮手双手施加相应载荷,运用先进复杂的生理学下背部模型计算炮手操作中背部L4/L5脊椎关节处的压力,包括肌肉、韧带与骨间压力,统计12组样本的评估数据(见表5)。
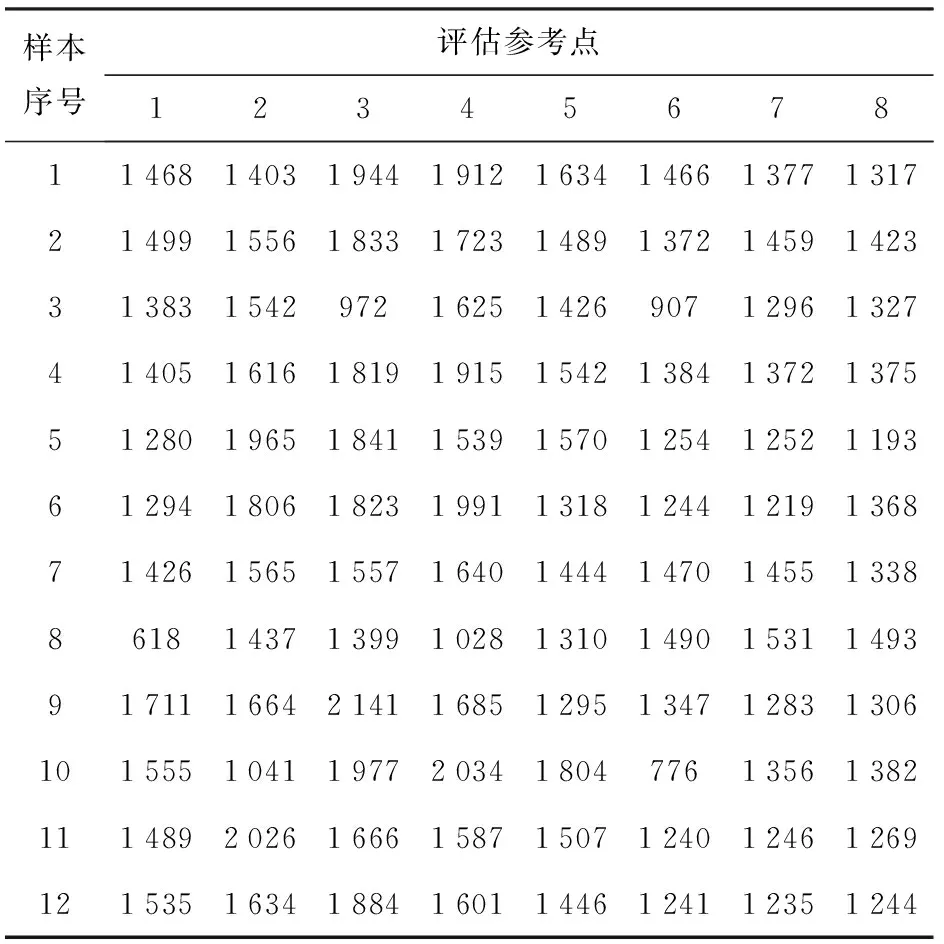
表5 炮手操作12组样本对应下背部受力评估结果
由表5可知,12组样本操作周期中下背部受力均低于推荐值,表明炮手背部受伤风险较低。由(1)式~(5)式计算灰色关联贴近度Q(见表6)。
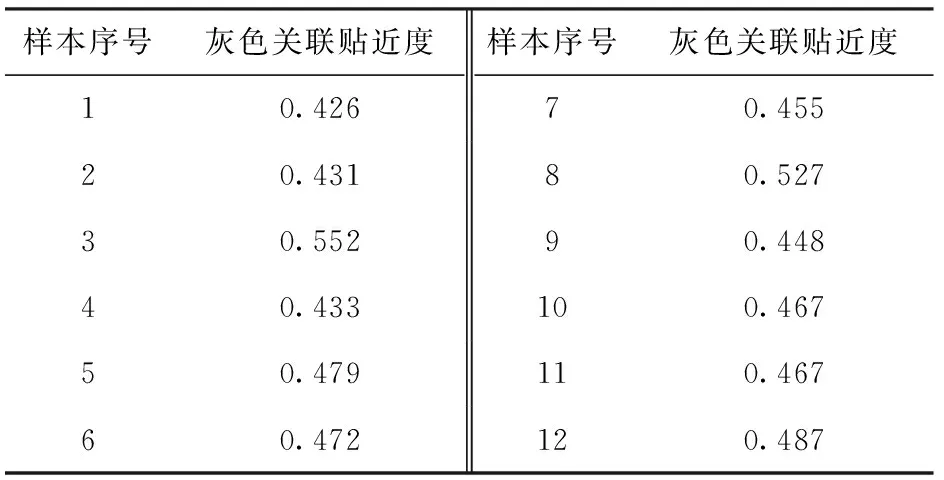
表6 下背部分析指标下12组样本灰色关联贴近度
由表6可看出,12组样本中:样本3灰色关联贴近度相对最高,下背部评估结果最好;样本1评估结果最差。统计各参考点下样本的评估数据均值,依次为1 388.58 N、1 604.58 N、1 738.00 N、1 690.00 N、1 482.08 N、1 265.92 N、1 340.08 N、1 336.25 N. 手轮由参考点1转动至参考点3过程,下背部受力提升约25.16%;由参考点3转动至参考点6过程,下背部受力降低约27.16%;循环往复。依托于操作姿势层面,参照下背部分析标准[14]可对样本评估结果之间的差异、操作周期中数据变化规律的成因讨论,结果表明若轮径、轴线高差尺寸设计不合理,将导致炮手操作时手臂向前拉伸幅度过大,造成躯干前倾增大L4/L5脊椎处受力与扭矩,提升下背部受力及背部疲劳与受伤的概率。
1.3.4 人体受力分析
受力分析评估部位包含手腕、肘部、肩部、躯干、臂部、膝盖、脚踝,需定义力的大小与方向,从转矩、力矩对肌肉的影响、关节弯曲角度、平均强度等层面对上述部位评估,基于动力学角度通过承载能力判断对应姿势下有多少百分比的人能以相对舒适的状态完成操作,数值越高表明姿势越合理[16]。由于手轮操作主要涉及上肢部位,且快速上肢分析指标已针对手腕、肘部评估,本节重点分析炮手肩部受力情况,提取右、左肩部承载能力指标,统计样本在上述两项指标下评估结果(见图3)。
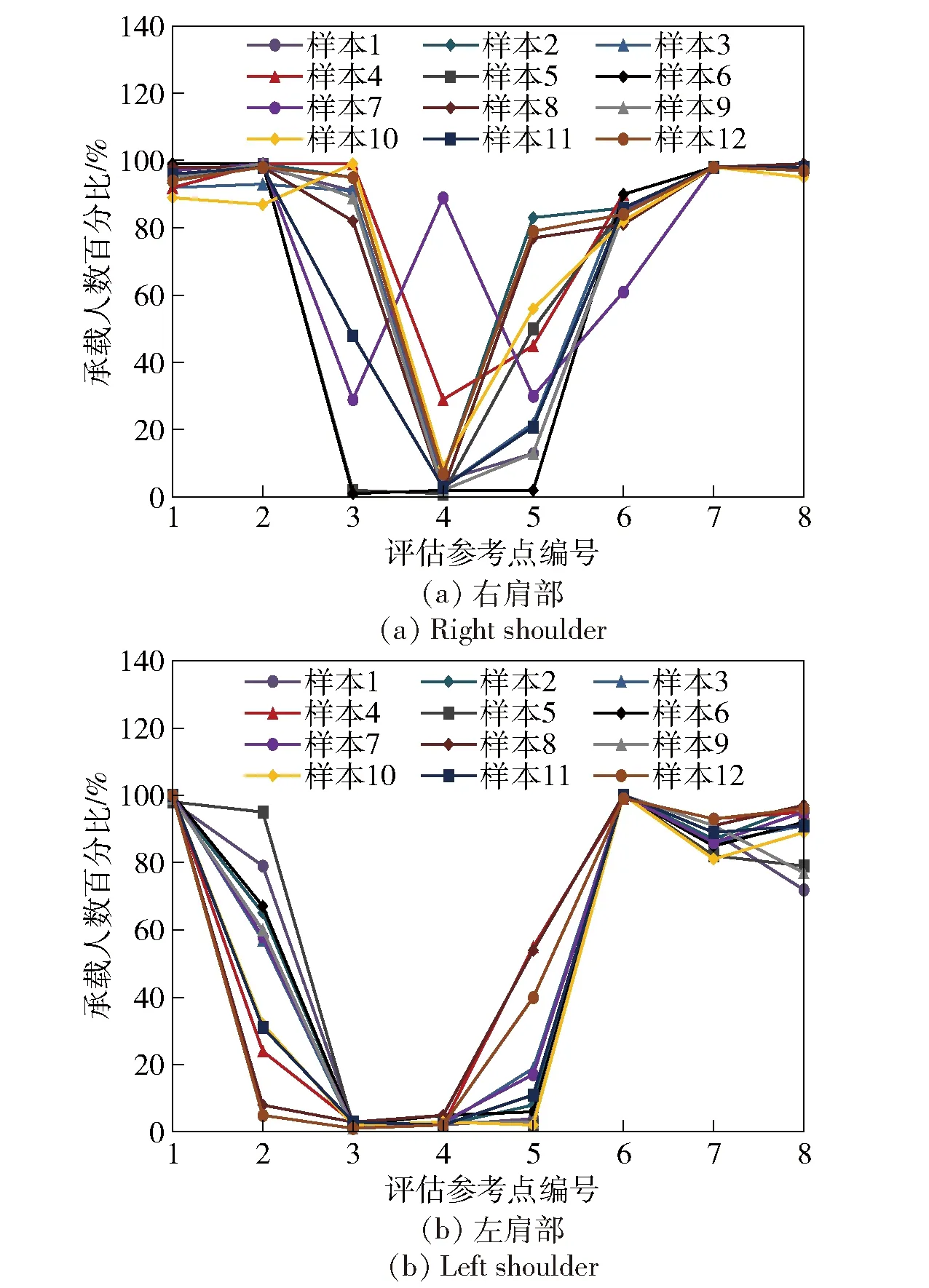
图3 12组样本右、左肩部承载能力评估结果Fig.3 Evaluated results of right and left shoulder bearing capacity in 12 groups of samples
参照图3(a),除样本7之外其余样本:由参考点2至参考点4,炮手操作中右上臂向躯干外侧拉伸造成右肩部肌肉紧张,承载力呈现下降趋势;由参考点4至参考点7,操作中右上臂向躯干内侧收缩,肩部肌肉逐渐恢复放松使承载力回升;由参考点7再次转回至初始位置,右肩部上提造成承载力略微下降。同理由图3(b)可对左肩部承载力评估结果分析。
将以上2项指标下评估数据依据(1)式~(5)式计算灰色关联贴近度Q(见表7与表8)。
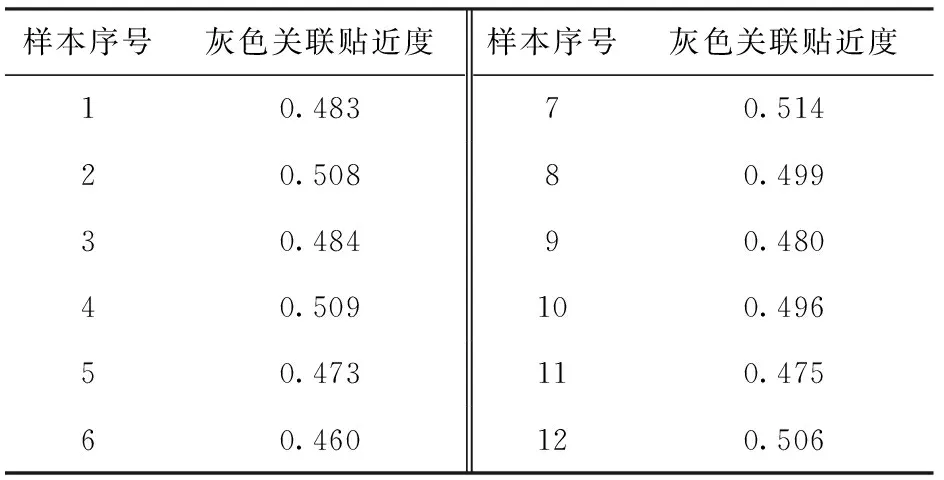
表7 右肩部承载力指标下12组样本灰色关联贴近度
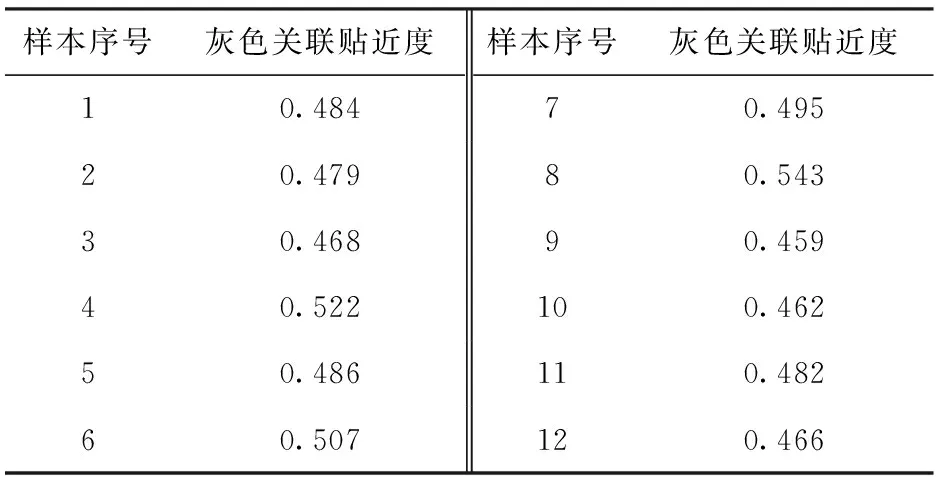
表8 左肩部承载力指标下12组样本灰色关联贴近度
由表7可知,右肩部承载力指标下12组样本评估结果优劣排序:样本7、样本4、样本2、样本12、样本8、样本10、样本3、样本1、样本9、样本11、样本5、样本6. 同理参照表8可对左肩部承载力指标下样本评估结果进行优劣排序。
1.4 多指标综合评估结果
快速上肢分析、下背部分析、双肩部承载能力指标下样本评估结果的优劣排序不一致。为探求样本在多指标下的综合评估结果,由样本的灰色关联贴近度构建12组比较序列,提取各指标层最优者构建参考序列,依据(6)式和(7)式计算灰色接近关联度(见表9)。

表9 12组样本多指标下对应接近关联度
由表9可知:序列9与参考序列之间接近关联度相对最低;序列8最高,相比较于序列9关联度数值提升约18.29%。表明样本8在4项指标下综合评估结果最优,样本9最差。样本8相比较于样本9在各评估参考点下快速上肢分析、下背部受力评估结果均值依次降低约4.26%与17.10%,右、左肩部承载能力均值依次提升约9.86%与5.53%,与综合评估结果一致。
1.5 手轮轮径与安装尺寸优化设计
依托综合评估结果,若轮径、安装轴线高差均无特殊限制,优化设计应优先参考样本8对应尺寸参数,轮径采用250 mm,方向机与高低机手轮安装轴线高度依次为1 050 mm与1 250 mm,轴线高差为200 mm。上述方式下炮手操作姿势合理,连续或高强度任务中上肢疲劳速度相对较慢、肩部承载能力较好、下背部受力较低、操作舒适度与人机工效较高。避免参考样本9,该设计方式下炮手操作姿势较不合理、肩部承载能力较差、下背部受力较高、定额或连续操作中将直接降低人机工效,提升上肢、肩部、背部疲劳与受伤的风险。
参照表9,以提升炮手操作工效为目标:若轮径限定为220 mm、250 mm情况下,应优先选择样本4与样本8,即两手轮均采用轴线高差200 mm的安装方式;当轮径限定为280 mm时应优先选择样本11,即两手轮采用轴线高差100 mm的安装方式。同理若手轮安装轴线高差限定为0 mm、100 mm、200 mm时,应选择样本5、样本7、样本8,即轮径均采用250 mm;当轴线高差为60 mm时,应选择样本2,即轮径采用220 mm.
2 人机综合评价
2.1 评价内容与方法
炮手操作手轮需抓握与轮缘连接的握柄,其长度相对标准约为80 mm,而握柄造型、截面直径与抓握时手掌压力分布、手腕偏转角度均相关,影响抓握舒适性与操作工效。评价中提取纺锤形、圆柱形、梨形、锥形4种不同造型握柄,截面直径参考范围22~38 mm,等距划分并设置20组样本(见表10)。
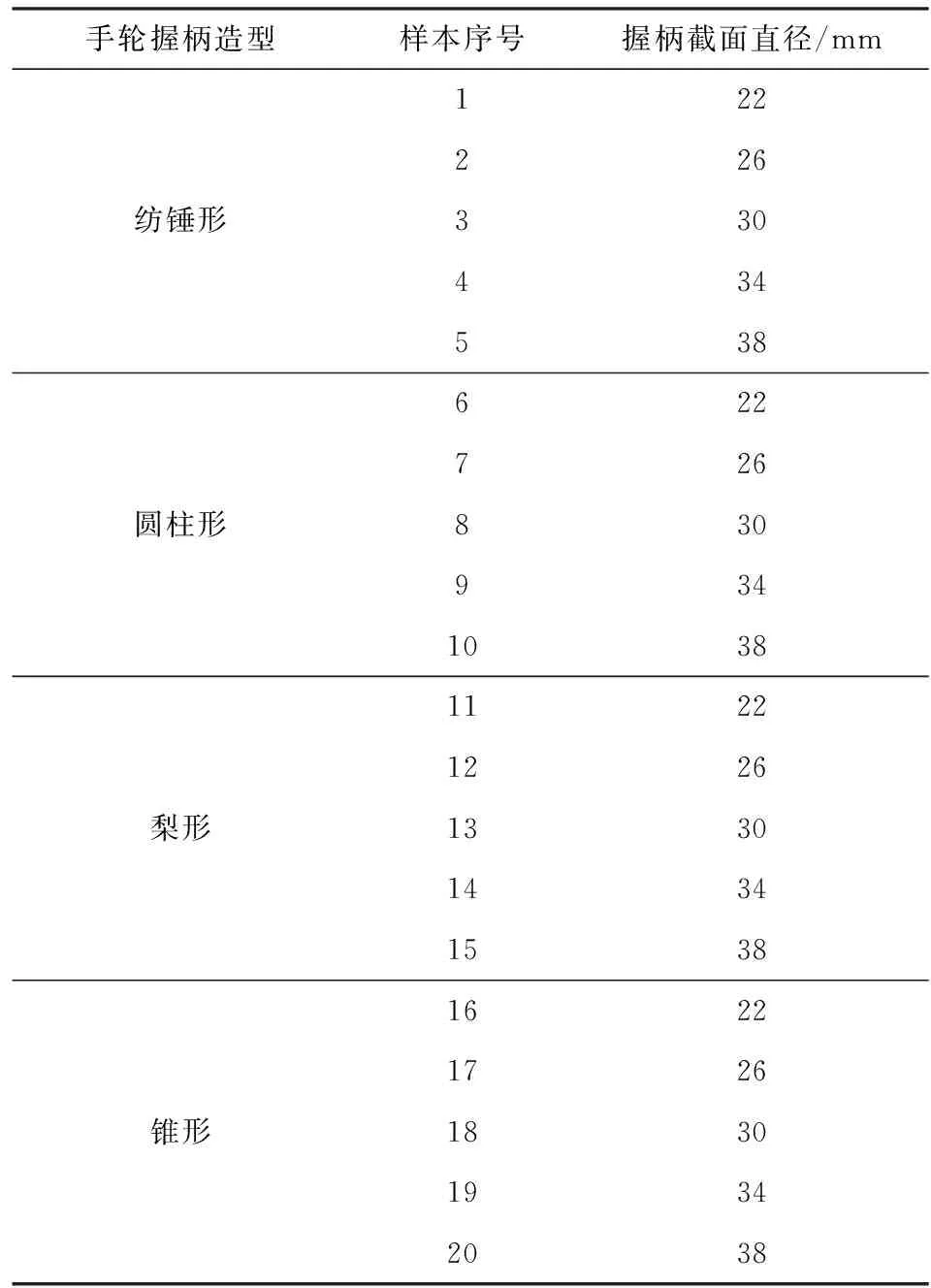
表10 握柄样本参数
首先依据样本参数制作握柄实物;其次构建评语集并提出评价人员可靠度系数计算方法,要求评价人员参照评语集面向20组样本进行抓握与评价,将评价数据结合人员可靠度系数计算得出综合评价结果;最后以手掌承压能力与手部抓握接触方式层面对结果讨论,由此提出优化设计策略。具体先进性包括:1)依托于评语集、三角模糊数等提出综合评价方法体系,由此对样本实物进行抓握与评价,旨在提升结果的可信度;2)对评价人员的筛选与可靠性计算,有效降低评价中人员认知的差异性、模糊性等主观因素对结果的干扰。
2.2 评价过程
2.2.1 样本实物制作
在三维建模软件Pro/Engineer中构建1∶1精确手轮握柄数字化模型,采用数控加工方式制作20组样本实物(见图4)。

图4 20组样本实物模型Fig.4 Physical models of 20 groups of samples
2.2.2 评语集构建
为平衡与控制评价难度及认知模糊性,评语集由自然语言变量组建,包括非常好、好、较好、一般、较差、差、非常差7级,将评语集运用三角模糊数[23]形式表达,其中非常好(9,10,10)、好(7,9,10)、非常差(0,0,1),以此类推。依据清晰型归一化原则将模糊三角矩阵转换为数值,假设数值为Y,三角模糊数为(a,b,c),转换公式为
Y=(a+2b+c)/4.
(8)
2.2.3 评价人员可靠度系数
本次评价人员包含人机领域研究员6名、炮手5名、火炮装配线工人2名、设计与维修人员2名。为弱化各领域人员对评价对象认知与熟悉度的差异等主观因素对结果准确性的影响,提出一种评价人员可靠度计算方法。人员可靠性由理论水平(占比30%)、实践经验(占比30%)、认知程度(占比20%)、自信程度(占比20%)4个方面构成[24],计算得人员可靠度系数最大值为8.8%,最小值为3.4%,表明15名评价人员的认知、评估标准之间存在一定差异,运用可靠度系数对评估结果进一步修正是必要的且有效的。
2.3 评价结果分析与讨论
提取样本评价结果源数据(三角模糊数形式),依据(8)式转换成清晰值,结合人员可靠度系数计算与统计得样本综合评价结果(见表11)。
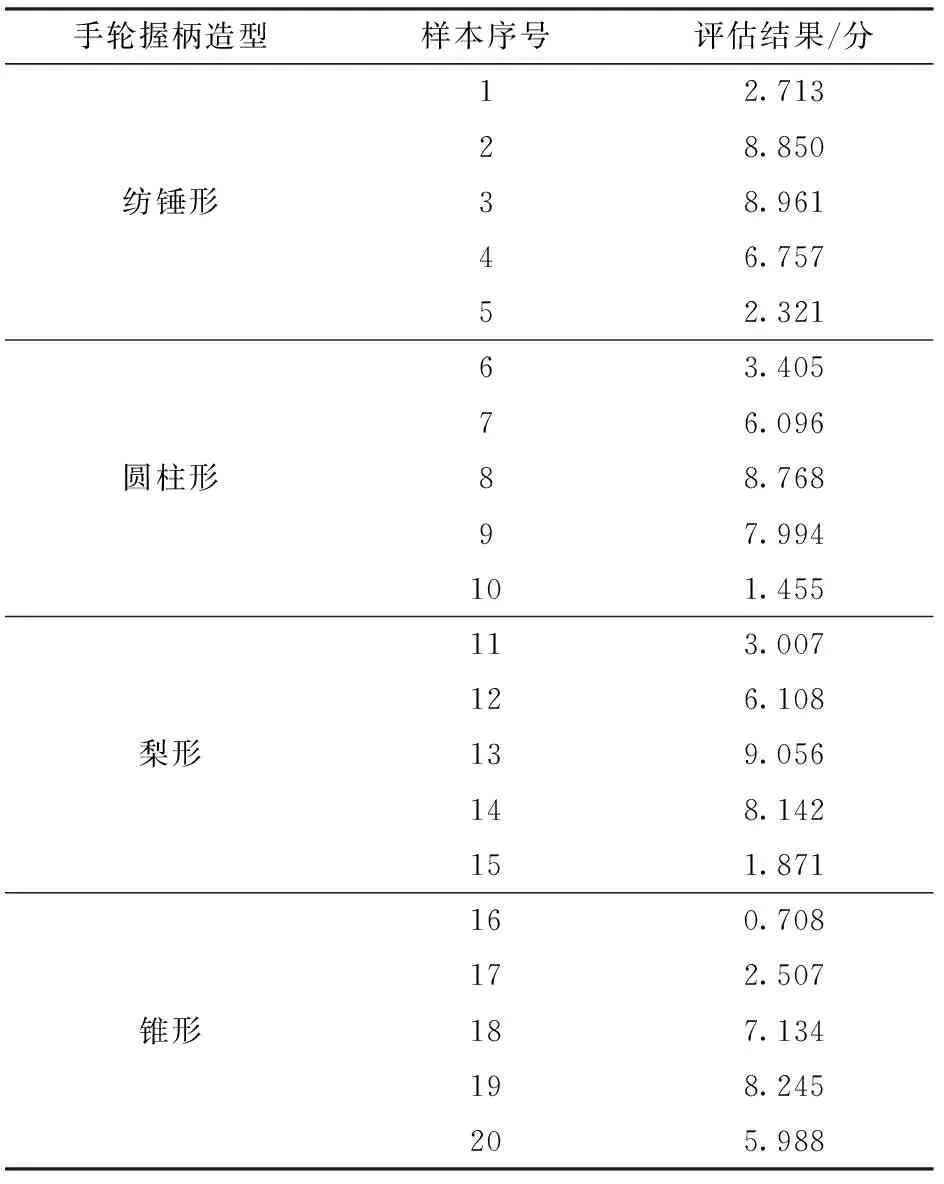
表11 20组样本抓握舒适度综合评价结果
首先,基于手掌各区域承压能力与抓握方式层面[25]针对同一造型握柄下样本评价结果讨论,提取手掌区域承压能力分布结果(见图5)。
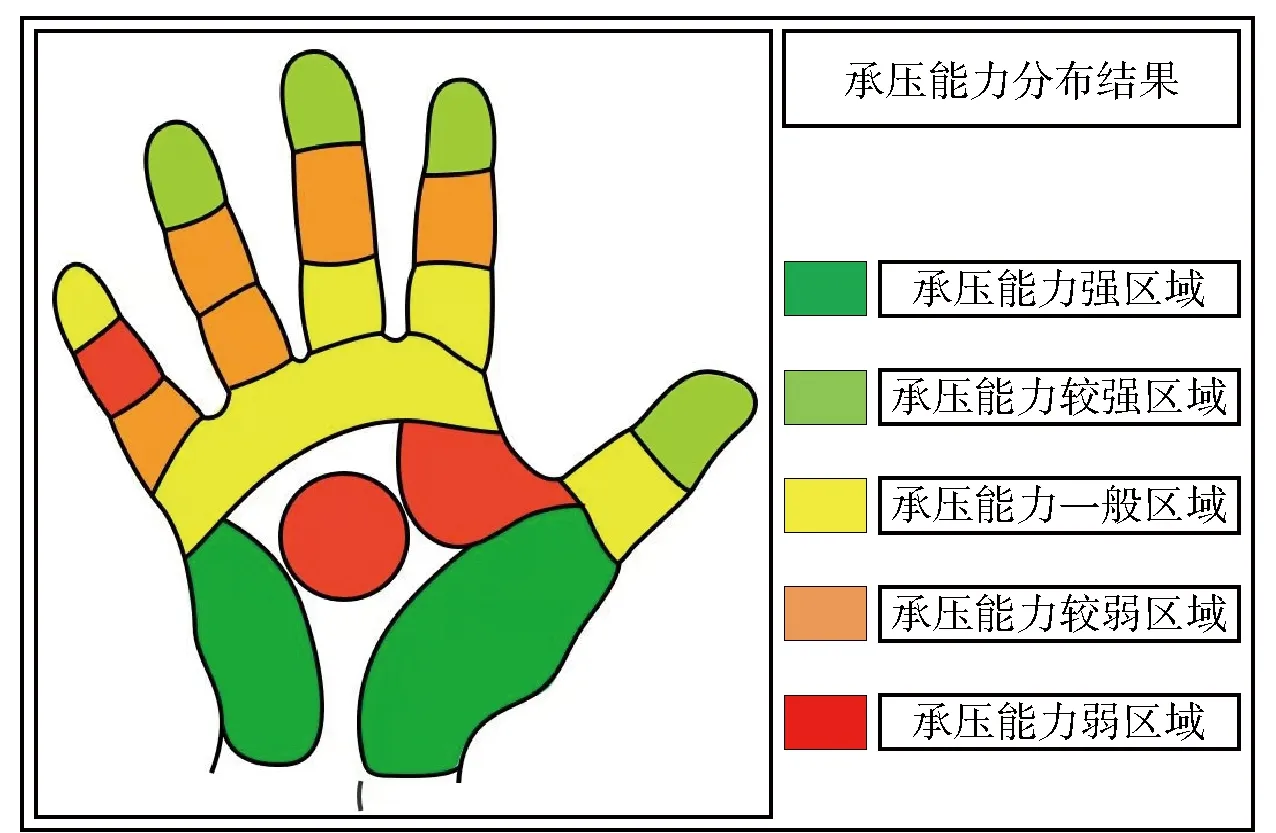
图5 手掌各区域承压能力分布Fig.5 Distribution of pressure bearing capacity in each area of palm
参照图5与表11,纺锤形握柄中样本3评价结果相对最高,样本5最低且较样本3评价值降低约74.1%,样本2与样本3相对接近。由于纺锤形握柄中间凸出两端较细,样本1截面直径过小降低了抓握时与手掌接触面积,握力不能均匀分散并传导至手部肌肉分布面积较大且承压能力较强的大、小鱼际肌区域;而通过握柄中部的凸起部分作用于肌肉分布较少,神经敏感度较高且承压能力较弱的掌心,以及承压能力中等或偏弱的中指、无名指的近节与中节指段附近,长时间抓握操作中将压迫手部神经末梢,阻碍血液循环造成麻木等不舒适的感受。样本5截面直径过大,为避免打滑抓握时施加较大的握力,造成承压能力中等或偏弱的5指近节指段与指骨间肌等区域压力集中,则舒适度也较低。样本2与样本3尺寸合理,抓握时与手掌接触面较大,使握力较好分布于承压能力中等或偏强的食指、中指、无名指指球肌,手掌前端指骨间肌以及承压能力强的大、小鱼际肌区域,抓握舒适度相对较高。样本4截面直径偏大则次于以上二者。同理可对圆柱形、梨形与锥形握柄样本评价结果展开讨论。
其次,对比不同造型握柄之间的评价结果,将4类造型握柄下样本评价数据求均值,依次为5.920、5.544、5.637、4.916,纺锤形相对最高,锥形最低且较纺锤形评价值降低约16.96%。进一步提取不同造型握柄抓握时与手部接触方式(见图6)。
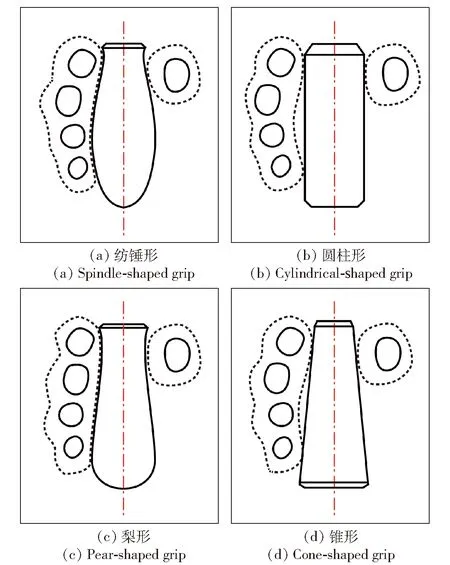
图6 握柄抓握时与手部接触方式Fig.6 Contact pattern of grips and hands when grasping handles
参照图5与图6(a)、图6(c),纺锤形与梨形握柄若截面直径设计合理,抓握时能较好贴合于手部使握力分散传导给大、小鱼际肌区域,且握柄造型设计有助于降低手腕桡侧与尺侧偏转角度。由图5、图6(b)可知,截面直径合理的圆柱形握柄抓握时与掌心之间存在空隙,有效降低抓握力与摩擦力对掌心等敏感部位的刺激。由图5、图6(d)可知,锥形握柄抓握时尽管可将握力均匀分布于小鱼际肌区域,但其外形设计易造成手腕桡侧偏转则舒适度略次于前三者。
2.4 手轮握柄尺寸优化设计
依据综合评价及讨论结果,若握柄采用纺锤形、圆柱形、梨形,优化设计时应依次优先参考样本3,样本8、样本13,截面直径均采用30 mm,相比较于其他截面尺寸,抓握时与手部接触方式及压力分布最合理,舒适度较高。此外纺锤形握柄截面直径采用26 mm,圆柱形与梨形截面直径均采用34 mm,以上三者也相对较优。设计中面向不同手部尺寸的人群,以30 mm直径为基础可在适度范围内调整截面尺寸,但不宜低于26 mm或高于34 mm,以期避免显著降低抓握舒适性从而影响工效。若使用锥形握柄,优先参考样本19即截面直径采用34 mm,由于该类型握柄前端较细,则最优截面直径也略大于其他3种造型的握柄,同理设计中也可适当调整尺寸,最小不宜低于30 mm,最大不宜超过38 mm.
4种造型的握柄中应优先考虑纺锤形、圆柱形、梨形握柄。纺锤形、梨形握柄与手掌贴合度较高因而抓握时手部支撑感较强,适合短时间高强度操作任务;而圆柱形握柄能较好避免掌心与握柄之间的接触与摩擦,适用于长时间连续的操作任务;锥形握柄设计中应避免前端过细以降低抓握时手腕偏转角度。
3 瞄准机手轮人机工效评估与优化模型
为更好拓展本文中流程与方法的应用范围,依托于应用层、评估层、数据层、知识层提出并构建瞄准机手轮要素工效评估与优化理论模型,模型包含动态操作姿势评估与静态抓握感受评价两部分。动态操作姿势评估可通过对炮手操作行为姿势的量化研究,提出手轮各项要素的优化设计策略,如轮径、安装轴线夹角与高度、轴线高差尺寸等(见图7)。静态抓握感受评价可针对影响炮手抓握舒适度的手轮要素展开研究,如握柄表面形态、材质、截面直径等(见图8)。模型应用层涵盖评估与优化设计两部分;评估层基于人机仿真与综合评价研究框架与逻辑;数据层包含文献资料、评估指标、仿真评估、综合评价方法等数据库,为评估层提供与之匹配的软件系统、方法与数据支撑;知识层呈现了理论知识本体信息,如评估方法理论知识、评估与设计的约束条件、基础算法等,揭示了数据库的构成元素。
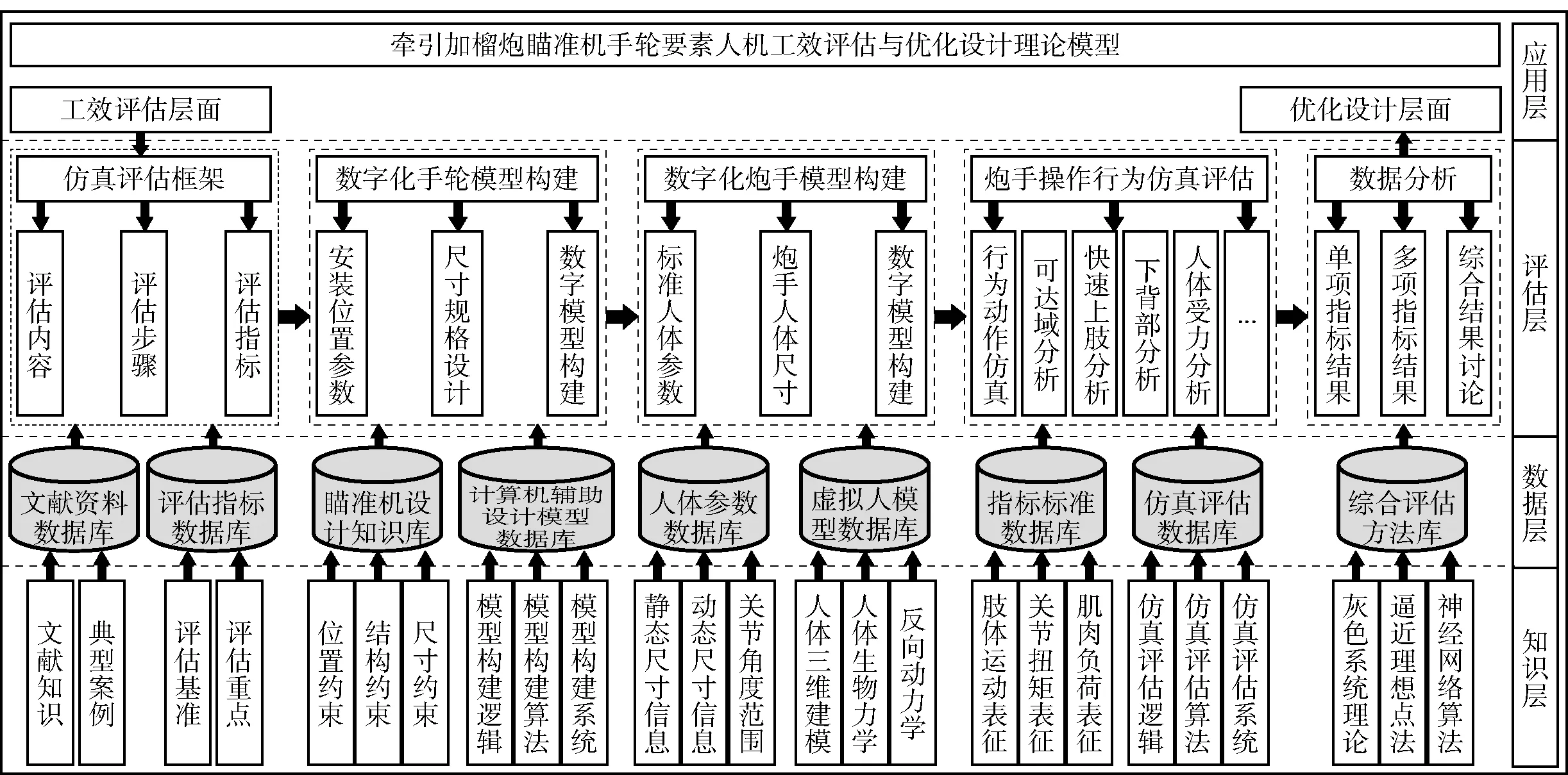
图7 牵引加榴炮瞄准机手轮要素人机工效评估与优化理论模型(动态操作姿势评估)Fig.7 Theoretical ergonomic evaluation and optimization model for handwheel factors of towed gun-howitzer sighting device (dynamic operation posture evaluation)
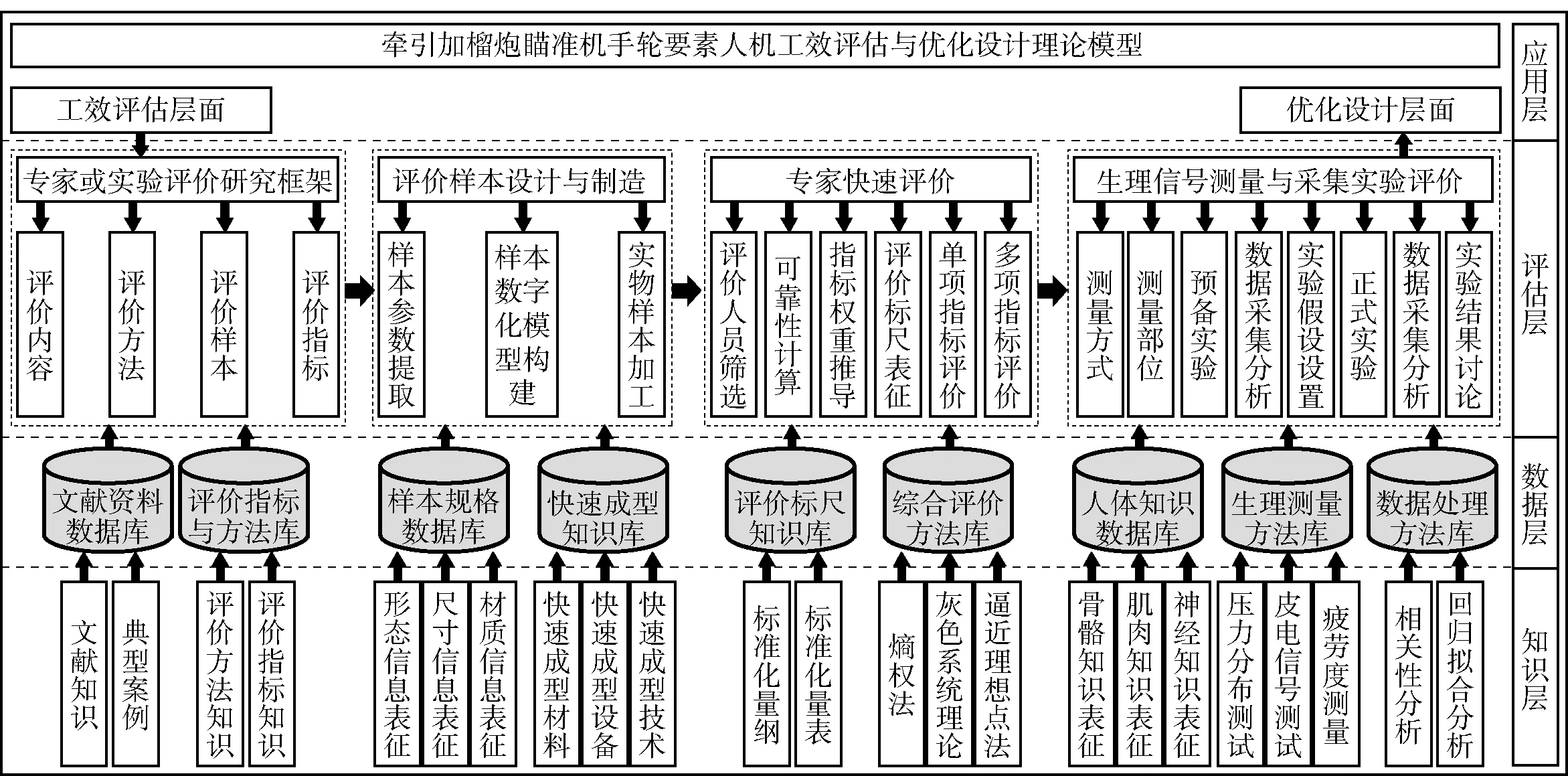
图8 牵引加榴炮瞄准机手轮要素人机工效评估与优化理论模型(静态抓握感受评价)Fig.8 Theoretical ergonomic evaluation and optimization model for handwheel factors of towed gun-howitzer sighting device (static grasp comfort evaluation)
4 结论
本文立足于人机工效层面,运用仿真、综合评价方法针对牵引加榴炮瞄准机手轮轮径、安装轴线高差、握柄截面尺寸展开研究,对结果讨论分析由此提出优化设计策略;依托动态行为姿势评估与静态抓握感受评价维度梳理并构建瞄准机手轮要素工效评估与优化理论模型。得到以下主要结论:
1)人机仿真评估结果表明,瞄准机手轮尺寸优化设计中:若对轮径、安装轴线高差均无特殊约束与限制,应优先参考样本8,采用250 mm的轮径且轴线高差为200 mm;若以上二者尺寸有相应限制条件设计时应在约束范围内筛选,并参考最优者的尺寸参数。
2)人机综合评价结果表明:若瞄准机手轮握柄采用纺锤形、圆柱形、梨形方式,截面直径优化中均优先参考30 mm;若采用锥形方式截面直径优先参考34 mm;此外针对手部尺寸较大或较小的人群可有弹性地调整截面直径。4种造型的握柄相比较,纺锤形、圆柱形、梨形略优于锥形,短时高强度操作任务中应优先考虑纺锤形、梨形握柄,长时连续操作任务时则优先考虑圆柱形握柄。
3)以设计策略为指导可对瞄准机手轮尺寸优化设计。在繁重、高强度的牵引火炮瞄准操作中,有效降低手部、上肢、肩部、背部疲劳速度与受伤概率,炮手无需高频率改变或调整操作姿势;提升人机工效与操作舒适度,有助于火炮快速、精确地瞄准。
4)探索性地提出瞄准机手轮要素评估与优化理论模型,以期为其他武器装备操作的人机工效评估提供借鉴与参考,后续评估中可依据具体操作姿势适当考虑加入躯干、臂部、膝盖、脚踝等部位的承载力指标,使评估结果更加细化、多样。
参考文献(References)
[1] 谈乐斌.火炮概论[M].北京:北京理工大学出版社,2014:256-261.
TAN L B.Introduction to artillery[M].Beijing:Beijing Institute of Technology Press,2014:256-261.(in Chinese)
[2] 易慎光, 谈乐斌, 潘孝斌, 等. 某车载速射迫击炮手轮工效分析[J]. 兵器装备工程学报, 2015,36(11):53-56.
YI S G,TAN L B,PAN X B,et al.Ergonomics analysis of handwheel of self-propelled rapid mortar[J].Journal of Ordnance Equipment Engineering,2015,36(11):53-56.(in Chinese)
[3] 张世全, 刘宁, 席鹏洲. 火炮瞄准系统设计中的人机工程学分析[J]. 火炮发射与控制学报, 2008,29(4):127-130.
ZHANG S Q,LIU N,XI P Z.Ergonomics analysis in gun aiming system design[J].Journal of Gun Launch & Control,2008,29(4):127-130.(in Chinese)
[4] 易慎光, 谈乐斌, 潘孝斌. 基于JACK的某加农榴弹炮手轮人机工效分析[J]. 火炮发射与控制学报, 2015, 36(2):22-25.
YI S G,TAN L B,PAN X B.Ergonomics analysis on the gun-howitzer handwheel based on JACK[J].Journal of Gun Launch & Control,2015, 36(2):22-25.(in Chinese)
[5] 苏胜, 王晗宇, 史雪瑞. 基于JACK的某型火箭炮乘员舱设计仿真与人机工程分析[J]. 火炮发射与控制学报, 2018, 39(3):47-51.
SU S,WANG H Y,SHI X R.Cockpit simulation and ergonomics analysis of multiple launch rocket system based on JACK[J].Journal of Gun Launch & Control,2018,39(3):47-51.(in Chinese)
[6] 邵婷,李光琛,张文兴,等.舰炮瞄准装置操控界面优化设计[J].火炮发射与控制学报,2016,37(3):76-79.
SHAO T,LI G C,ZHANG W X,et al.Manipulation interface optimized design of aiming devices of naval gun[J].Journal of Gun Launch & Control,2016,37(3):76-79.(in Chinese)
[7] 王立红,冯士民.基于主成分分析法的舰炮武器人机交互性能评估[J].火力与指挥控制,2018,43(3):125-128.
WANG L H,FENG S M.Evaluation of naval gun weapon human-computer interaction performance based on principal component analysis[J].Fire Control & Command Control,2018,43(3):125-128.(in Chinese)
[8] 赵祎乾,吴天宇,顾森,等.基于人机工效的瞄准机手轮安装方式优化设计[J].南京理工大学学报,2019,43(6):727-738.
ZHAO Y Q,WU T Y,GU S,et al.Optimized design of mounting mode of sighting device handwheel based on human-machine ergonomics[J].Journal of Nanjing University of Science and Technology,2019,43(6):727-738.(in Chinese)
[9] 顾辉,谈乐斌,潘孝斌.基于JACK的某车载炮装填过程仿真研究[J].人类工效学,2011,17(4):48-51.
GU H,TAN L B,PAN X B.The simulation of truck-mounted artillery filling based on JACK[J].Chinese Journal of Ergonomics,2011,17(4):48-51.(in Chinese)
[10] BALASUBRAMANIAN V, SHARMA S. Biomechanical analysis of main gun loader in an armoured combat vehicle[J]. International Journal of Industrial and Systems Engineering, 2009, 4(1):46-59.
[11] 王华亭, 田宇, 程广伟,等. 基于JACK的某自行高炮乘员舱人机工效评估[J]. 火炮发射与控制学报, 2013,34(2):63-66.
WANG H T,TIAN Y,CHENG G W,et al.Ergonomic assessment of crew compartment in a self-propelled anti-aircraft gun based on JACK[J].Journal of Gun Launch & Control,2013,34(2):63-66.(in Chinese)
[12] 谈乐斌. 火炮人机工程学[M]. 北京:兵器工业出版社, 1999:80-85.
TAN L B.Artillery ergonomics[M].Beijing: Publishing House of Ordnance Industry,1999:80-85.(in Chinese)
[13] CHEN J,FALKMER T,PARSONS R,et al.Impact of experience when using the rapid upper limb assessment to assess postural risk in children using information and communication technologies[J].Applied Ergonomics,2014, 45(3):398-405.
[14] WATERS T, GENAIDY A, VIRUET H B, et al. The impact of operating heavy equipment vehicles on lower back disorders[J]. Ergonomics, 2008, 51(5):602-636.
[15] SPINELLI R,AMINTI G, FRANCESCO D F.Postural risk assessment of mechanised firewood processing[J].Ergonomics,2017,60(3):375-383.
[16] 钮建伟, 张乐. Jack人因工程基础及应用实例[M]. 北京:电子工业出版社, 2012:73-268.
NIU J W,ZHANG L.Human factor engineering foundation and application example of Jack[M].Beijing:Publishing House of Electronics Industry,2012:73-268.(in Chinese)
[17] 中国人民解放军总装备部.军事装备和设施的人机工程设计手册:GJB/Z 131—2002[S].北京:中国人民解放军总装备部,2002.
The PLA General Armaments Department.Human engineering design handbook for military equipment and facilities:GJB/Z 131—2002[S].Beijing:the PLA General Armaments Department,2002.(in Chinese)
[18] GUNES S,SENYIGIT E,KARAKAYA E,et al.Optimization of heat transfer and pressure drop in a tube with loose-fit perforated twisted tapes by Taguchi method and grey relational analysis[J].Journal of Thermal Analysis and Calorimetry,2019,136(4):1795-1806.
[19] 奚之飞,徐安,寇英信, 等.基于前景理论的空战目标威胁评估[J].兵工学报,2020,41(6):1236-1248.
XI Z F,XU A,KOU Y X,et al.Air combat target threat assessment based on prospect theory[J].Acta Armamentarii,2020,41(6):1236-1248.(in Chinese)
[20] 蒋诗泉,刘思峰,刘中侠,等.灰色面板数据视域下的相似性和接近性关联度模型拓展[J].运筹与管理,2019,28(4):163-168.
JIANG S Q,LIU S F,LIU Z X,et al.Expansion in the relational model of similarity and nearness in the view of grey panel data[J].Operations Research and Management Science,2019,28(4):163-168.(in Chinese)
[21] 董大勇,王黎静,袁修干,等.人体表面不同部位可达性等级确定的试验研究[J].兵工学报,2010,31(7):1003-1008.
DONG D Y,WANG L J,YUAN X G,et al.Experimental research on the determination of human body surface reachable grade[J].Acta Armamentarii,2010,31(7):1003-1008.(in Chinese)
[22] BEHJATI M, ARJMAND N. Biomechanical assessment of the NIOSH lifting equation in asymmetric load-handling activities using a detailed musculoskeletal model[J].Human Factors,2019, 61(2):191-202.
[23] LIANG D C, LIU D, PEDRYCZ W,et all. Triangular fuzzy decision-theoretic rough sets[J]. International Journal of Approximate Reasoning, 2013,54(8):1087-1106.
[24] 徐海玉,张安,汤志荔,等.飞机驾驶舱人机界面综合评估[J].科学技术与工程,2012,12(4):940-943.
XU H Y,ZHANG A,TANG Z L,et al.Comprehensive evaluation of aircraft cockpit human-machine interface[J].Science Techno-logy and Engineering,2012,12(4):940-943.(in Chinese)
[25] 夏如龙. 基于压力分布的工具手柄抓握舒适性研究[D].杭州:浙江工业大学,2013:15-29.
XIA R L.The research on grip comfort of the tool handles based on pressure distribution[D].Hangzhou:Zhejiang University of Technology,2013:15-29.(in Chinese)
猜你喜欢
南都周刊(2021年3期)2021-04-22
好日子(下旬)(2020年6期)2020-08-04
文苑(2020年5期)2020-06-16
小学生学习指导(低年级)(2020年3期)2020-06-02
英美文学研究论丛(2020年2期)2020-02-06
学校教育研究(2017年30期)2017-08-13
知识就是力量(2017年3期)2017-03-21
海外星云(2016年7期)2016-12-01
数理化学习·教育理论版(2013年9期)2013-12-27