
微型无人直升机的应用现状及发展趋势探析
2021-04-08 03:20唐兴中冷俊杰李治权孙薇
航空科学技术 2021年1期
唐兴中 冷俊杰 李治权 孙薇
摘要:微型无人直升机具有外形尺寸小、重量轻、易于操作、便于携带、隐蔽性好等特点,适于执行单兵侦察监视、特种作战、通信中继、高危区域探测识别、群体投放等任务。本文对国内外微型无人直升机的发展现状进行研究,提出未来发展微型无人直升机亟待解决的部件微小型化及系统集成技术、低雷诺数空气动力分析、微小型动力装置和能源技术、飞行控制与自主导航技术、光电传感与图像传输技术等关键技术,并对未来微型无人直升机在军民用领域发展和应用前景进行了展望。
关键词:微型飞行器;微型无人直升机;微机电系统;多学科设计优化技术
中图分类号:V279+.2文献标识码:ADOI:10.19452/j.issn1007-5453.2021.01.007
微型飞行器(MAV)的概念是在20世纪90年代初美国兰德公司向美国国防预先研究计划局(DARPA)提交的一份关于未来军事技术的报告中首次提出的[1]。经过多次评估和研讨,1997年,DARPA正式批准微型飞行器研究计划。随着微型飞行器研究的不断深入,人们发现微型飞行器并不是常规无人机的微小型化。微型飞行器超小尺寸、超轻质量的要求带来总体布局、控制系统、动力和能源装置等一系列革命性的技术难题。参考DARPA的指标,微型飞行器一般是指各向尺寸不超过150mm、重量(质量)不超过100g、续航时间20~60min、巡航速度30~60km/h、平台承载重量不大于18g、最大飞行距离1~10km,具有携带任务载荷执行特定任务、能自主飞行的基本特征。
国际上通常按照飞行方式和总体结构布局特点把微型飞行器划分为固定翼、旋翼、扑翼飞行器三大类[2]。微型无人直升机属于MAV家族中的旋翼类,因其具有体积小、可悬停、机动性好、方便携带、操作简单等特点,特别适合执行近距、复杂环境下侦察监视、探测识别、通信中继、定向清除等任务。
开展微型无人直升机研究,突破各项关键技术,可以带动相关领域技术的发展,有助于快速推出适合军民用市场的产品[3]。
1发展现状
自20世纪90年代,世界上很多国家科研机构开展了对微型无人直升机的探索和研究。随着微处理器的出现并且功能的逐步强大,导航和传感信息处理设备的能力大大增强,特别是1995年麻省林肯实验室利用计算机芯片技术研制成功了微型电视摄像机之后,微型飞行器很快发展起来。虽然很多项目由于资金、动力装置、微电子器件等因素没有成功,或者停留在实验室阶段,但为以后微型无人直升机的发展奠定了基础。典型的微型无人直升机有美国Kolibri和Mesicopter[3]。
Kolibri是Lutronix公司與Auburn大学合作研制的垂直起降微型无人机(见图1),可采用单旋翼或者对转双旋翼。基本尺寸为直径10cm,总重约316g,有效载荷大约100g。采用D-STAR公司研制的微型柴油发动机重37g,输出功率35W,加注132g的燃油一般可飞行30min。
Mesicopter是美国斯坦福大学研制的四旋翼微型无人直升机(见图1)。机身为16mm×16mm的方形框架,其最大尺寸不大于5cm,总质量小于15g。4副旋翼是固定桨距,分别由4个直径3mm、重325mg的微电机来驱动,利用改变电机的力矩实现滚转、俯仰、偏航等飞行姿态变化。每副旋翼共三片桨叶,直径为15mm,厚度仅0.08mm。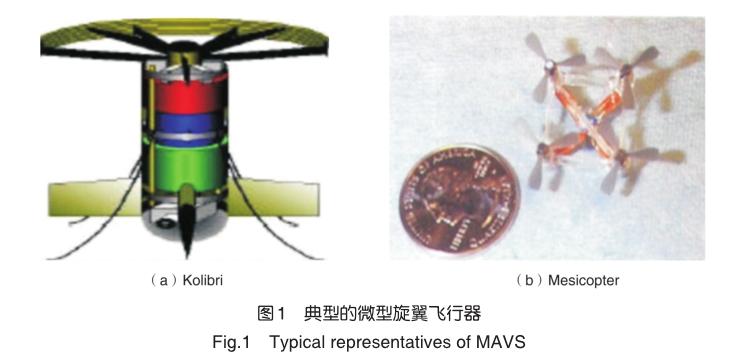

目前公开的资料显示,2009年挪威Prox Dynamics AS公司研制的“黑黄蜂”PD-100系列(见图2)是发展比较完善并且真正投入战场使用的微型无人直升机,后来挪威Prox Dynamics AS公司被美国Flir公司收购[3-4]。“黑黄蜂”微型无人直升机长度16cm,重量18g左右,可以持续飞行25min,最快速度可达10m/s,航程为3.2km,静声设计使得它不容易被发现[4]。
国内对于微型无人直升机的研究从2000年开始,各高等院校、研究所、企业纷纷开展了微型无人直升机相关研究工作。清华大学在2011年研制微型四旋翼飞行器(见图3),并成功实现首飞。上海交通大学设计了一款微型无人直升机,对研究低雷诺数下的相关空气动力学提供了很好的数据基础。南京航空航天大学、哈尔滨工程大学提出了多种微型无人直升机设计方案,并进行了试飞。航空工业直升机所也开展了相关的工作。最近几年,市场上出现了许多消费级的微小型直升机,满足了爱好者的高空摄像、娱乐等需求。大疆公司目前推出的最小多轴旋翼无人机御MAVIC MINI(见图4),起飞重量249g,桨叶展开后尺寸为245mm×290mm×55mm,最大飞行时间30min。由此看出,我国在微型无人直升机远程控制系统、识别系统、通信传送系统、传感系统、智能系统、飞行仿真、机构设计、气动外形设计等领域获得了突出成果,解决了微型无人直升机在设计、制造、使用中所面临或将要面临的很多问题,对填补国内微型无人直升机技术空白起到了一定的作用。
2关键技术
微型无人直升机并不是常规构型直升机的小型化,尺寸的缩小带来了许多新的技术挑战。微型无人直升机的研制涉及总体、气动、飞控、电池、材料、通信等诸多学科,需要攻克总体设计和气动合理布局、动力装置及能源等部件微小化、飞行控制和数据传输等诸多难题,这也成为制约微型无人直升机发展的关键技术[1,3-4],主要有以下几个方面。
2.1部件微小型化及系统集成技术
微型无人直升机超小的结构空间决定它必然是一个高度集成的复杂系统。由于微型飞行器总重不到100g,根本无法单独使用传统的机械装置或电机、电池,需要把微型机构、传感器、执行器、信号处理电路及电源等许多系统整合为一体[5]。各种微小型器件和功能模块高度集成必然会存在各种耦合、散热以及其他相互干扰因素。近年来,借助微纳米科技、MEMS技术以及结构能源一体化设计等技术的发展,微型无人直升机部件和机载元件的微小型化、系统集成已取得一些进展,但微纳米科技、MEMS微小化、跨学科、高度集成特性等所带来的复杂性始终制约着微型无人直升机的发展。
2.2低雷诺数空气动力学分析技术
相比于常规大型飞行器,微型无人直升机在整个飞行包线内雷诺数都很小,通常在几千到几万左右,黏性效应显著,空气动力学特性有较大不同,空气动力特性很难模拟。低雷诺数下流场的高黏性特性、边界层厚度的增加及产生大范围分离流的可能性,使得以高雷诺数试验为基础的设计工具以及基本的设计规则已不再适用。
自20世纪90年代,针对微型无人直升机低雷诺数流动特点,在低雷诺数计算分析和试验验证方法上开展了持续而深入的研究。近几年,已有部分在低雷诺数下提升微型无人直升机升阻比的研究取得初步进展,如优化气动外形和机翼形状,利用非定常外部激励效应(如扰流片、吹吸气、动壁效应等),但针对低雷诺数非定常流的研究仍面临很大的挑战。
2.3微小型动力装置和能源技术
微型动力装置和能源技术是影响微型无人直升机性能优劣的重要因素。动力和能源系统必须体积小、质量轻、能量和功率密度高,保证足够的飞行速度和续航时间;振动小,保证侦察、采集等任务设备正常工作;噪声小,以保证飞行器的隐蔽性。目前动力和能源系统尺寸和重量较大、效率较低是限制微型无人直升机尺寸和重量难以缩减、性能难以提升的重要方面。从统计数据来看,微型无人直升机动力和能源系统占总重量50%以上。如果微型无人直升机起飞重量在100g以下,导航系统、电视/红外摄像机、传感器等有效载荷目前约在30g,那么机体和动力装置就只能有70g[6]。目前微型涡轮发动机、微型燃料/化学电池、微型太阳能等是微型无人直升机可以选择的动力源。考虑到微型无人直升机垂直起降、低噪声、隐蔽性好、操作简单等要求,还要兼顾技术相对成熟、成本可接受,采用电推进系统作为动力装置和能源是十分有前途的。近年来,电机、电池、电控技术均有了长足的进步。电机尺寸已经非常微型化,电池种类有很多,如锂电池、空气电池、石墨烯电池等。由于微型无人直升机具有尺寸非常小、一般需要随身携带、需要快速反复充电等特点,要求电池能量密度高、功率转化率高、安全性好等[7]。目前锂电池是可行的选择,其理论能量密度大于300W?h/kg,安全因数与能量密度负相关,寿命范围为500~2000次充放电。未来如何减少推进系统的自重和提高推进系统的效率是决定微型无人直升机是否成功的关键技术之一[8]。
2.4飞行控制与自主导航技术
对于微型无人直升机,常规的直升机飞行控制技术不再适用。微型无人直升机常常工作在树林、城镇等地方,需要在操纵者的视线之外飞行,并且经常会遇到侧风、障碍、攻击等各种突发情况,对内部导航系统会造成误导,使微型无人直升机偏航或坠毁。因此微型无人直升机飞控系统的研制不仅非常复杂,涉及立体视觉、自主任务规划、自主避障等诸多技术,而且要求体积和重量要尽量小,以满足飞行性能要求[9]。由于微型无人直升机对象特性差异显著、模型阶次高且建模难度大、非线性特性強、飞行模态数量多、高阶动力学特性对操纵品质影响大等,微型无人直升机的飞行控制系统设计一直是亟待解决的关键问题之一[10-11]。
2.5光电传感与图像传输技术
微型无人直升机最常用的功能是作为侦察监测工具,首要任务是实现图像信息的获取与无线传输。微型无人直升机体积小、有效载荷轻,严重限制了光电传感、图像传输功能模块和任务载荷的体积和重量,使得传输质量、距离和速度都会受到影响。如果在远距离或敌人干扰的情况下不能实施通信或不能可靠地工作,信息无法发给操作人员,这种飞行器就失去其优势。微型无人直升机飞行状态多变,带来图像信号质量极不稳定、图像数据量太大、占用带宽甚宽、复杂战场环境存在强电磁干扰等一系列问题[12]。因此加强数字信号传输的高实时性图像压缩编码算法、复杂战场环境下的纠错编码技术、目标图像稳像技术、提高图像实时传输能力等方面研究是未来微型无人直升机满足未来信息战需要迫切解决的关键。
3应用前景及发展趋势
未来微型无人直升机将在军事和民用领域获得广泛应用,或将改变未来战争及人类生活方式。纵观微型无人直升机的研究现状和相关关键技术,可以预见微型无人直升机未来的研究将朝着模块化、标准化、集群化、智能化等方向发展[13]。
3.1应用前景
目前在公开的报道中微型无人直升机主要应用于军事用途,深受部队的喜爱。据报道,“黑黄蜂”无人机最早投入战场是在阿富汗,除美国以外,英国、澳大利亚等国家军队都有采购。2020年7月19日,网络上出现一张叙利亚士兵手持一架捕获的“黑黄蜂”3型微型无人直升机的照片,证实美军的确已经将微型无人直升机用于战场。目前微型无人直升机并没有像人们期望的那样得到广泛应用,主要影响因素是设计、制造成本比较高。微型无人直升机研发过程中需要的包括结构、系统、元器件等都需要特殊定制,成本很难降下来。据媒体报道,PD-100微型无人直升机重量只有18g,售价却高达19万美元,折合人民币130多万元,不得不说拥有堪比黄金的价值。相信未来随着技术进步,诸多难题将逐步解决,微型无人直升机一定会发挥其独特功能,大有用武之地。
微型无人直升机最大的作用是解决“最后1km”。微型无人直升机具有体积小、机动灵活、可悬停、无起降场地要求、隐蔽性好、成本低、携带方便、可重复使用等诸多优点,可以在狭窄、复杂空间区域靠近目标,并保持悬停,通过全天候图像传感器发送高清晰图像等目标特征信息,特别适合在卫星、侦察机和人员无法监控的地区或高污染、高辐射等危险区域执行侦察和监视任务,完成其他无人飞行器无法执行的任务,应用前景十分广泛[14]。
在执行军事任务中,微型无人直升机可以提供探测、干扰、抑制及摧毁能力,虽然它的有效载荷有限,但操控性、隐蔽性好,可以飞抵敌方人员、雷达、通信设备、武器系统、防御设施等很近的区域或位置实施探测、监视和干扰,如果携带微型高效能的炸弹,甚至计算机病毒、生化药剂、电子干扰设备等,可以对敌方人员、设备、武器系统等目标实施近距离突然袭击,造成致命或非致命毁伤。如果发动群体攻击,其有效性会大大增加[15]。微型无人直升机融入其他有人平台或无人系统组成网络,可以担负目标侦察、识别与打击、实时损伤评估、通信中继等任务,大幅提升有人平台在反介入和区域拒止环境中的生存能力。例如,“黑黄蜂”微型无人直升机的地面控制系统,由一个带手动控制器和显示单元的基站和两个飞行器组成。每个飞行器配备两个日间摄像机和一个热成像仪。使用者借助小型显示屏和单手操作控制器的帮助下,操控飞行器实现导航、录像以及悬停拍摄等功能,即使在夜间也可以清楚地为小型作战单位提供額外的态势感知情报,而不必曝露作战人员的位置或让其直接面临危险。
此外,微型无人直升机可以广泛应用于环境监测研究、自然灾害救援、边境安检巡逻、消防灭火等诸多民用领域,还能够携带特殊设备对遭受核、生化武器袭击或者危险化学品泄漏污染区域进行探测和识别[16]。
3.2发展趋势
(1)模块化
随着低雷诺数气动机理研究、低功耗元器件、高能量密度电池等技术的不断发展成熟,微型无人直升机集成化程度会越来越高,重量和体积会越来越小。与此同时,集成化程度越高,也会带来故障诊断和检修的困难,使得微型无人机的运行和维护成本极高。采用模块化的设计思想和通用、开放式的设计理念,微型无人直升机可以根据需求组装不同任务模块,实现功能模块“即插即用”,快速更换受损模块,甚至可以在不同军种、武器系统、使用场景间实现兼容操作,不仅可以使应用场景针对性更强、出动速度更快、可维修性更高,而且有助于显著降低成本[17]。
(2)集群化
“蜂群”式的协同攻击作战可以带来指数级力量倍增效应。集群协同作战的前提就是信息共享,对未来数据链的发展提出了极高的要求,需要极高的数据传输速率和带宽,以便“蜂眼”能够实时将所见共享至整个“蜂群”。数量庞大、低成本的微型无人直升机队可以从不同方向蜂拥而至使得目标应接不暇,或者发出虚假目标特征信号,使得敌方防御网络彻底失效,同时对诸如雷达、通信、防空武器等敌方重点武器装备进行“点穴”式失能毁伤,为己方后续进行大型武器装备攻击提供窗口。
(3)智能化
目前,微型无人直升机已经实现在与操纵员联系被切断的情况下完成自主返航、自主降落等功能。未来,随人工智能、5G、微电子、纳米技术等技术进步,微型无人直升机智能化、自主化、自动化程度必将大大提高,能够自主完成飞行、目标搜索、识别和跟踪、打击决策等工作,成为在战场上能力越来越强、越来越受到重视的先进武器装备。
4结束语
微型无人直升机是多学科交叉的复杂系统,涉及航空、微电子、材料等多个领域,在军、民用领域都有广泛的应用前景。从当前的研究现状来看,微型无人直升机的相关技术研究还远未成熟,很多关键技术问题仍亟待解决,在实际应用中也还远没有挖掘出其真正潜力。未来随着微型无人直升机技术的不断成熟,各国研究机构必然会加大对微型无人直升机的研究和开发[18]。因此,无论是从使用价值方面,还是从推动技术发展方面考虑,我们都要紧跟技术发展前沿,大力推动微型无人直升机技术和应用研究向前跨越和发展。
参考文献
[1]李占科,宋笔锋,宋海龙.微型飞行器的研究现状及其关键技术[J].飞行力学,2003(4):1-4. Li Zhanke,Song Bifeng,Song Hailong. Research status and key technologies of micro unmanned vehicles[J]. Flight Dynamics, 2003(4):1-4.(in Chinese)
[2]陈世适,姜臻,董晓飞,等.微小型飞行器发展现状及关键技术浅析[J].无人系统技术,2018(1):38-53. Chen Shishi, Jiang Zhen, Dong Xiaofei, et al. Development status and key technologies of micro unmanned vehicles[J]. Unmanned Systems Technology,2018(1):38-53.(in Chinese)
[3]张少杰.微型无人直升机的发展和应用[J].中国科技信息, 2017(17):30-32. Zhang Shaojie.Development and application of micro unmanned helicopter[J].China Science and Technology Information, 2017(17):30-32.(in Chinese)
[4]蔡汝鸿.微型直升机的研制与发展[J].直升机技术,2002(4):42-45. Cai Ruhong. Research and development of micro helicopter[J]. Helicopter Technology, 2002(4): 42-45.(in Chinese)
[5]刘鹏飞.微型无人直升机技术研究现状与发展[J].军民两用技术与产品,2017(6):1. Liu Pengfei. Research status and development of micro unmanned helicopter technology[J]. Dual Use Technologies & Products, 2017 (6):1.(in Chinese)
[6]梁向东.电动飞行器及其关键技术的研究探析[J].航空科学技术,2020,31(6):1-6. Liang Xiangdong. Research on electric vehicle and its key technology[J]. Aeronautical Science & Technology,2020,31(6): 1-6. (in Chinese)
[7]李开省.电动飞机技术的发展研究[J].航空科学技术,2019,30(1):1-7. Li Kaisheng.Research on the development of electric aircraft technology[J].Aeronautical Science & Technology,2019,30(1): 1-7.(in Chinese)
[8]范振伟,杨凤田,项松,等.我国电动飞机发展现状及建议[J].航空科学技术,2019,30(11):18-21. Fan Zhenwei,Yang Fengtian,Xiang Song,et al.Present situation and advice of electric aircraft development in China[J]. Aeronautical Science & Technology, 2019, 30(11): 18-21. (in Chinese)
[9]陳彦博.某新型微型旋翼飞行器的飞行控制系统设计[D].南京:南京航空航天大学,2009. Chen Yanbo. The design and implementation of the flight control system for a new type of micro-rotor aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009. (in Chinese)
[10]徐玉.微小型无人直升机飞控平台与姿态融合算法研究[D].杭州:浙江大学,2008. Xu Yu.Research on fusion algorithm of flight control platform and attitude for micro unmanned helicopter[D]. Hangzhou: Zhejiang University,2008.(in Chinese)
[11]吕俊刚,汪家道,陈大融.微型无人直升机旋翼操纵机构设计及分析[J].清华大学学报(自然科学版),2002,42(11):1484-1487. Lyu Jungang,Wang Jiadao,Chen Darong.Design and analysis of micro unmanned helicopter rotor control mechanism[J].Journal of Tsinghua University, 2002,42(11): 1484-1487.(in Chinese)
[12]肖永利,曹长江,李振波,等.一种微型直升机的设计和研制[J].微米/纳米科学与技术,2000(1):170-177. Xiao Yongli, Cao Changjiang, Li Zhenbo, et al. Design and development of a mini helicopter[J]. Micron / Nano Science and Technology,2000(1):170-172.(in Chinese)
[13]罗鹏.无人直升机技术及应用[C]//第二十五届全国直升机年会,2009. Luo Peng. Unmanned helicopters technology [J]. The 25th National HelicopterAnnual Meeting,2009.(in Chinese)
[14]淳于江民,张珩.微型无人直升机技术研究现状和展望[J].机器人技术与应用,2004(6):6-11. Chunyu Jiangmin,Zhang Hang.Research status and prospect of micro unmanned helicopter technology[J]. Robot Technique andApplication, 2004(6):6-11.(in Chinese)
[15]包强,隋毅,刘阳,等.微型无人飞行器的使用及研制现状[J].飞航导弹,2008(9):29-32. Bao Qiang,Sui Yi,Liu Yang,et al.Application and development of micro UAV[J]. Aerodynamic Missile Journal,2018(9):29-32.(in Chinese)
[16]严斌,任勇,董景新.微型四旋翼飞行器的设计与实现[C]//中国制导、导航与控制学术会议(CGNCC2012),2012. Yan Bin,Ren Yong, Dong Jingxin. Design and implementation of micro-quadrotor[C]//Chinese Guidance, Navigation and Control Conference(CGNCC2012),2012.(in Chinese)
[17]尹欣繁,張代兵,张纪阳,等.微型无人直升机发展现状及关键技术[J].飞航导弹,2018(5):33-37. Yin Xinfan, Zhang Daibing, Zhang Jiyang, et al. Development status and key technologies of micro unmanned helicopter[J]. Aerodynamic Missile Journal, 2018(5):33-37.(in Chinese)
[18]陈国栋,贾培发,刘艳.微型飞行器的研究与发展[J].机器人技术与应用,2006(3):30. Chen Guodong,Jia Peifa,Liu Yan.Research and development of micro vehicles[J].Robot Technique and Application, 2006(3): 30.(in Chinese)
(责任编辑王为)
作者简介
唐兴中(1973-)男,硕士,研究员级高级工程师。主要研究方向:直升机总体。
Tel:13366107209E-mail:txz0305@163.com
Research on the Development Trend of Micro Unmanned Helicopter
Tang Xingzhong*,Leng Junjie,Li Zhiquan,Sun Wei Chinese Aeronautical Establishment,Beijing 100029,China
Abstract: Micro unmanned helicopter has the characteristics of small size, light weight, easy to operate, easy to carry and good concealment. It is suitable for individual reconnaissance and surveillance, special operations, communication relay, high-risk area detection and identification, group launch and other tasks. In this paper, through the research on the development status of micro unmanned helicopter at home and abroad, the key technologies such as microminiaturization and system integration technology, low Reynolds number aerodynamic analysis, micro power plant and energy technology, flight control and autonomous navigation technology, photoelectric sensor and image transmission technology, etc., are studied and put forward. The development and application prospect of micro unmanned helicopter in the field of military and civil use are prospected.
Key Words: micro air vehicle; micro unmanned helicopter; micro electromechanical system; multidisciplinary design optimization
