电动舵机控制系统可靠性仿真与优化
2021-04-09 11:00张侦英钱云鹏涂宏茂
兵器装备工程学报 2021年3期
张侦英,钱云鹏,涂宏茂,2,刘 勤,2
(1.中国兵器科学研究院, 北京 100089;2.东北大学 机械工程与自动化学院, 沈阳 110819)
电动舵机广泛应用于火箭、导弹、鱼雷等武器系统中[1-3],通过驱动舵片偏转控制弹药的姿态与航向。舵机性能的好坏直接决定着制导弹药飞行过程的动态品质。从电动舵机研制过程中的故障模式看,除机械零部件、电子元器件的失效外,很多是由于控制系统输入电压、控制信号、控制参数等参数漂移而导致的动作不到位、频响缓慢、超调等性能故障[4]。结合在研的某型电动舵机,考虑主要控制参数的随机性,利用MATLAB SIMULINK和MSC.ADAMS软件建立了控制系统的动力学仿真模型,通过拟合运动精度、超调量、上升时间等性能参数与控制参数的响应面模型进行了可靠性分析;然后以运动精度误差最小为目标,考虑多个性能可靠度约束建立优化模型,运用概率功能度量法将可靠度约束近似转换为线性约束,并利用序列二次规划算法实现可靠性优化模型的求解,得到了优化的控制参数设计方案。与常规优化结果对比表明,基于该设计方案的电动舵机具有更好地性能和可靠性。
1 电动舵机控制系统动力学仿真模型
电动舵机的工作原理如图1所示,由控制器、电机、减速器、反馈电位计等构成。控制器接收弹上计算机给定的舵机偏转角度指令,与舵片实际偏转角进行比较,得到角度偏差,经由控制算法处理生成控制信号,然后进行功率放大驱动电机运转,经减速器减速后带动舵片向指令位置偏转。舵片偏转的角度利用反馈电位计反馈给舵机控制器以构成闭环控制。为了满足这样的要求,控制器需要计算出转角对应的电机输入电压,并将这个电压以PWM波的形式输出。
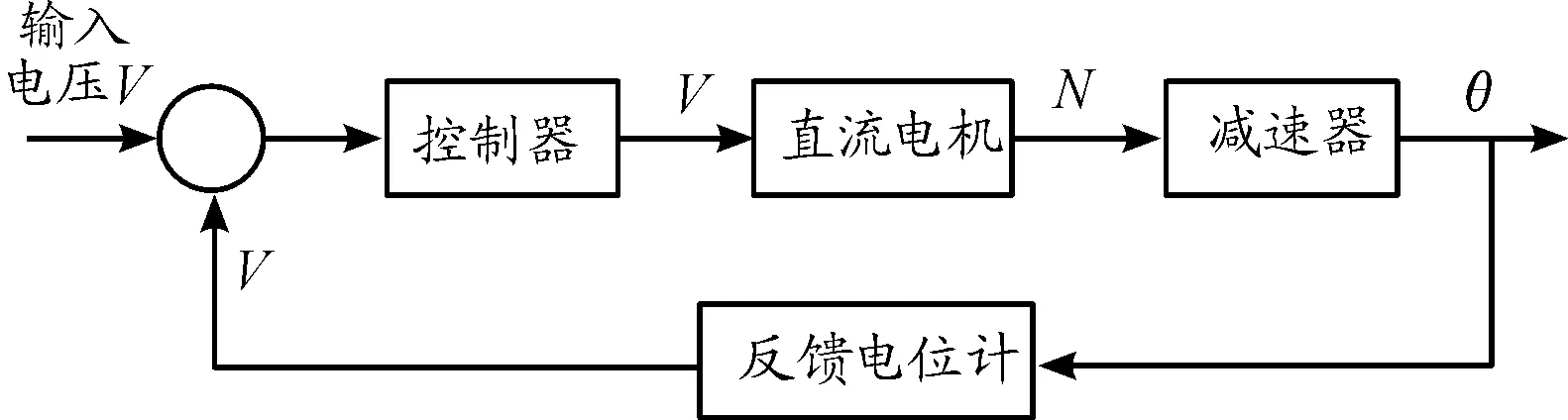
图1 电动舵机工作原理框图
为提高控制精度,采用了PID控制策略。比例系数Kp用于实时成比例的反映控制系统的偏差信号,偏差一旦产生,控制系统立即产生控制作用,以减少偏差。积分系数Ki主要用于消除静差,提高系统的误差度。微分系数Kd反映偏差信号的变化趋势,并能在偏差信号值变的更大之前,在系统中引入一个早期修正信号,从而加快系统的动作速度,减少调节时间。
根据电动舵机的原理,利用MATLAB SIMULINK分别对控制器、直流电动机、反馈电位计建立数学模型,利用MSC.ADAMS建立减速器的机构运动学模型(见图2),通过MATLAB与MSC.ADAMS的接口将机构运动学模型导入MATLAB,构建动力学仿真模型如图3所示,可仿真计算稳态值、超调量、上升时间和调整时间。
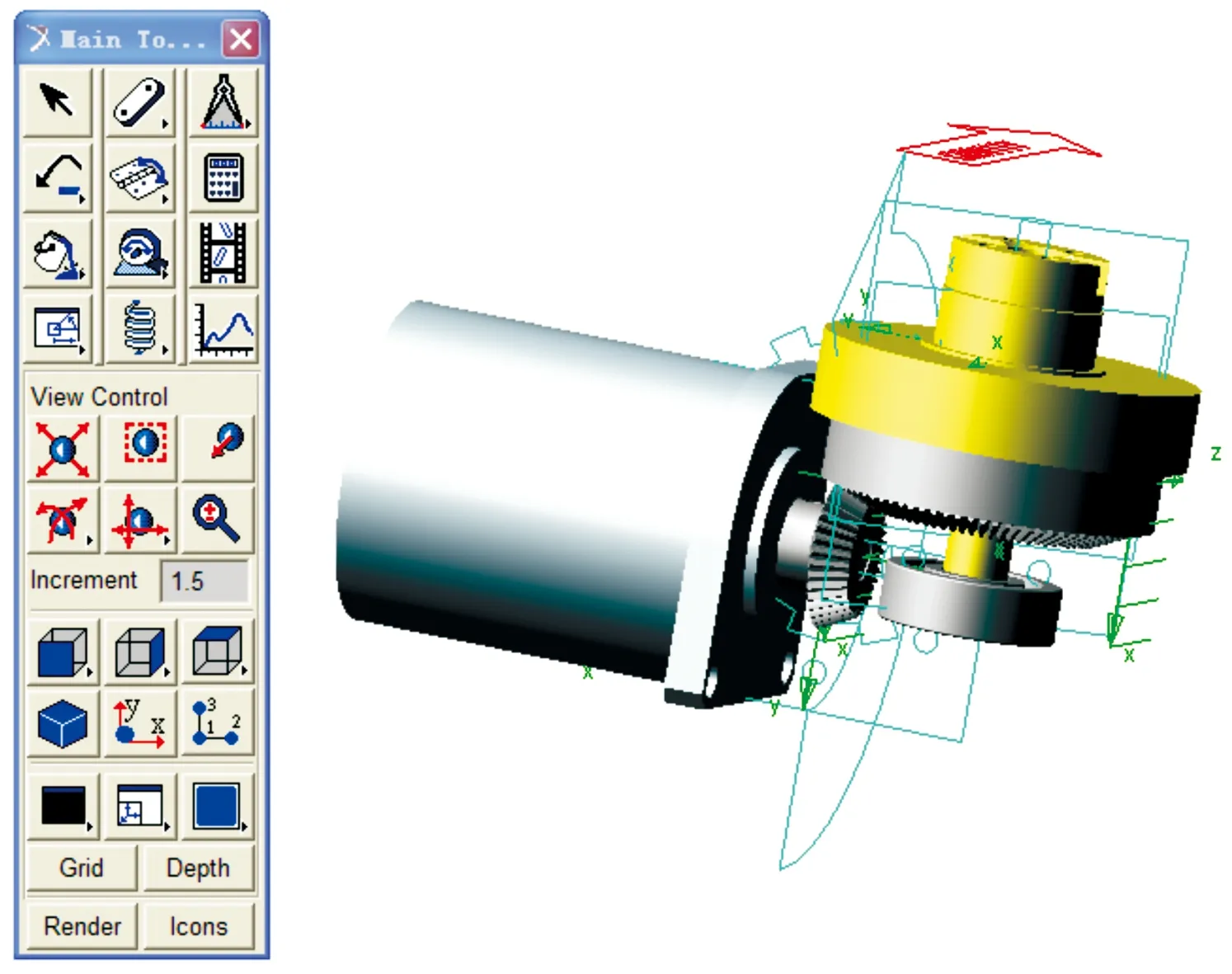
图2 减速器的机构运动学模型示意图
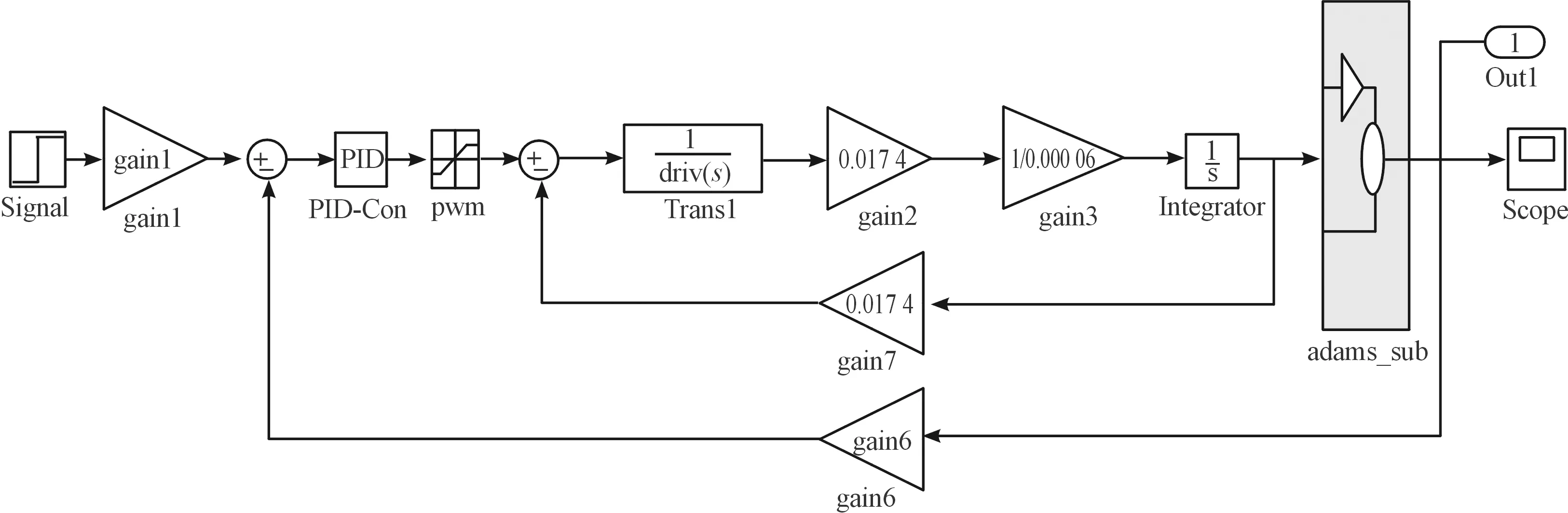
图3 电动舵机控制系统动力学仿真模型框图
电动舵机的传递系数为2(°)/V,即1 V输入信号下理论转角为2°。初始设计方案的比例系数Kp=4.15,积分系数Ki=2,微分系数Kd=0.8,gain6为反馈电位计,gain6=0.44,gain1为增益系数,gain1=0.882。adams_sub为减速器MSC.ADAMS机构运动模型导入到MATLAB中的调用接口。driv(s)为用电机电路总电感d1和总电阻d2表征的传递函数。
图4为1 V阶跃输入信号下电动舵机的响应曲线。可以看出,尽管稳态值满足要求,但初始方案的上升时间和调整时间过长,导致舵机不满足快速性要求,需进一步优化控制系统的控制参数。
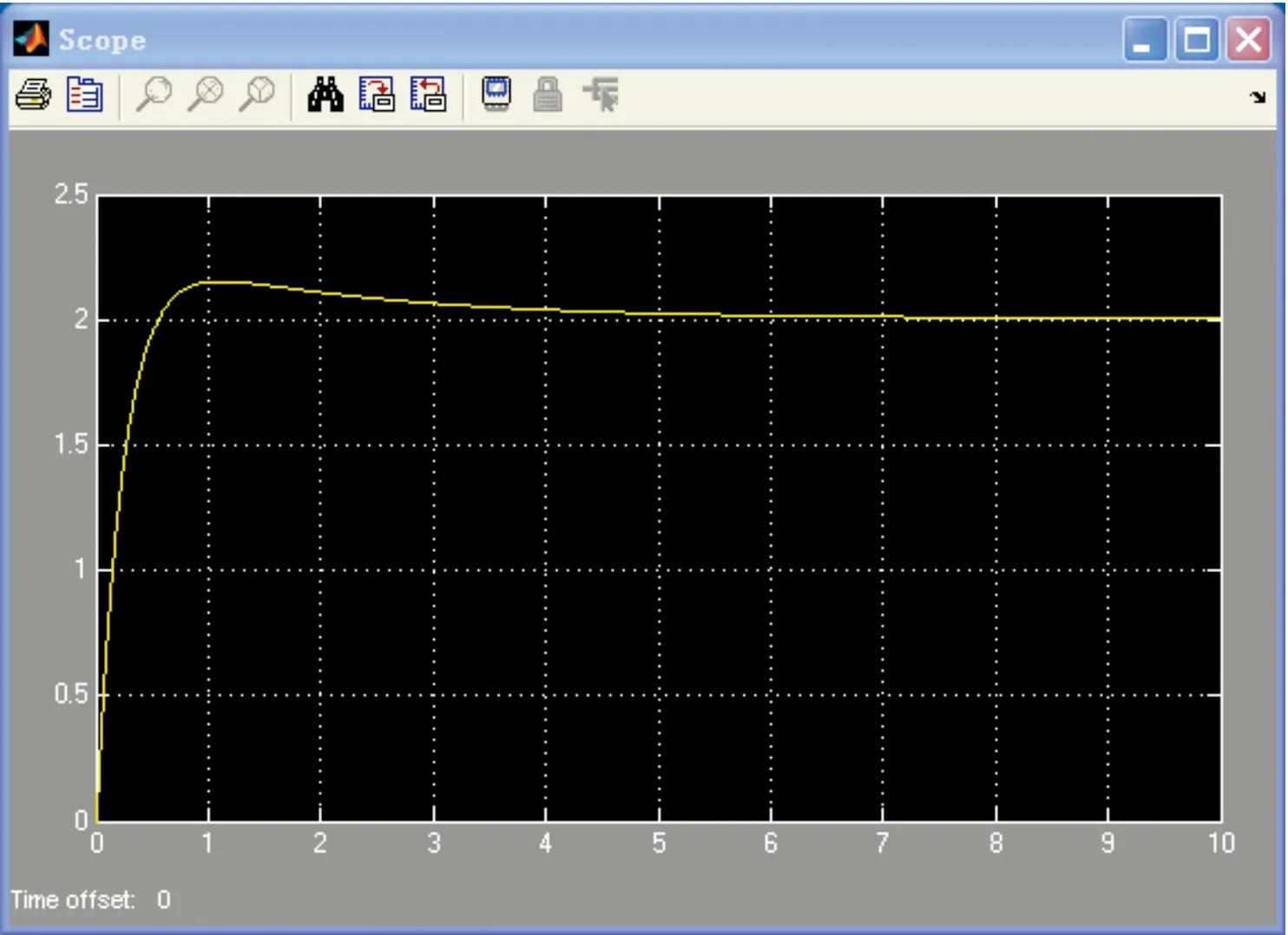
图4 1 V信号下舵机的响应曲线
2 可靠性分析
该型电动舵机的主要性能指标为运动精度±(0.2+4%δ),δ为理论转角;动态上升时间小于35ms;超调量小于5%;调整时间小于300 ms。
考虑主要控制参数的随机性(表1),分别以运动精度误差、超调量、上升时间、调整时间大于指标要求作为失效判据,建立极限状态函数如下:
Z1=δ-|2-f|
(1)
Z2=0.05-fp
(2)
Z3=0.035-tp
(3)
Z4=0.3-ta
(4)
式中:f、fp、tp、ta分别为利用前述的动力学仿真模型计算的稳态值、超调量、上升时间和调整时间。

表1 可靠性分析考虑的主要随机参数
利用一次可靠度法进行可靠度计算时,常需要进行多次迭代计算[5],直接调用动力学仿真模型进行计算一方面计算量较大[6],另一方面由于数值计算误差会影响可靠性分析与优化算法的应用。因此选用均匀试验设计方法多次调用动力学仿真模型计算,然后拟合性能参数与随机参数的响应面模型[7],基于该响应面模型计算可靠度。其中均匀试验设计的试验次数选择216次,各次仿真结果见图5,响应面模型选择包含交叉项的2阶多项式,分别如图6所示。响应面模型拟合的精度可以采用复相关系数R2进行检验:
(5)

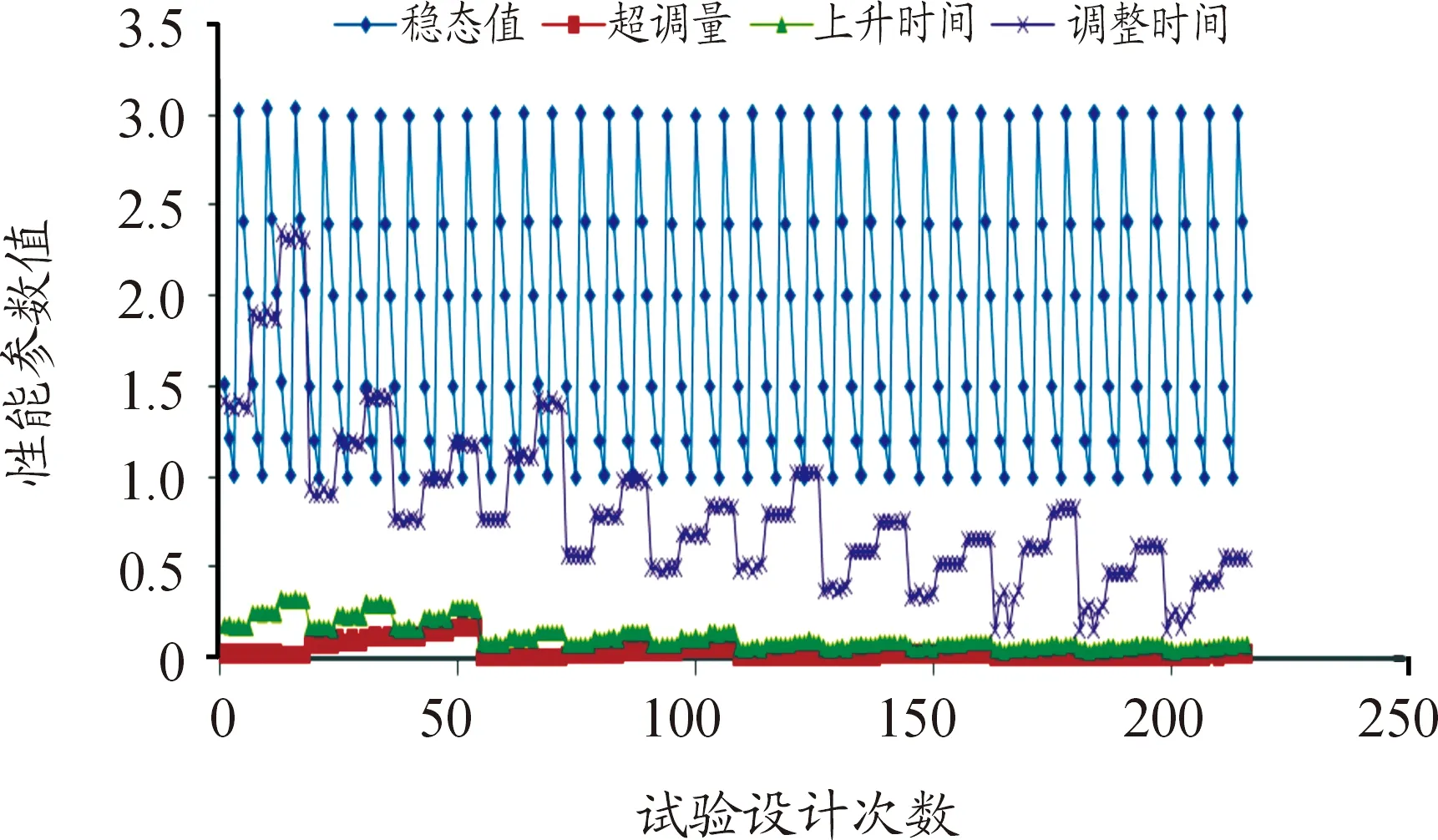
图5 各次均匀试验设计的性能仿真结果
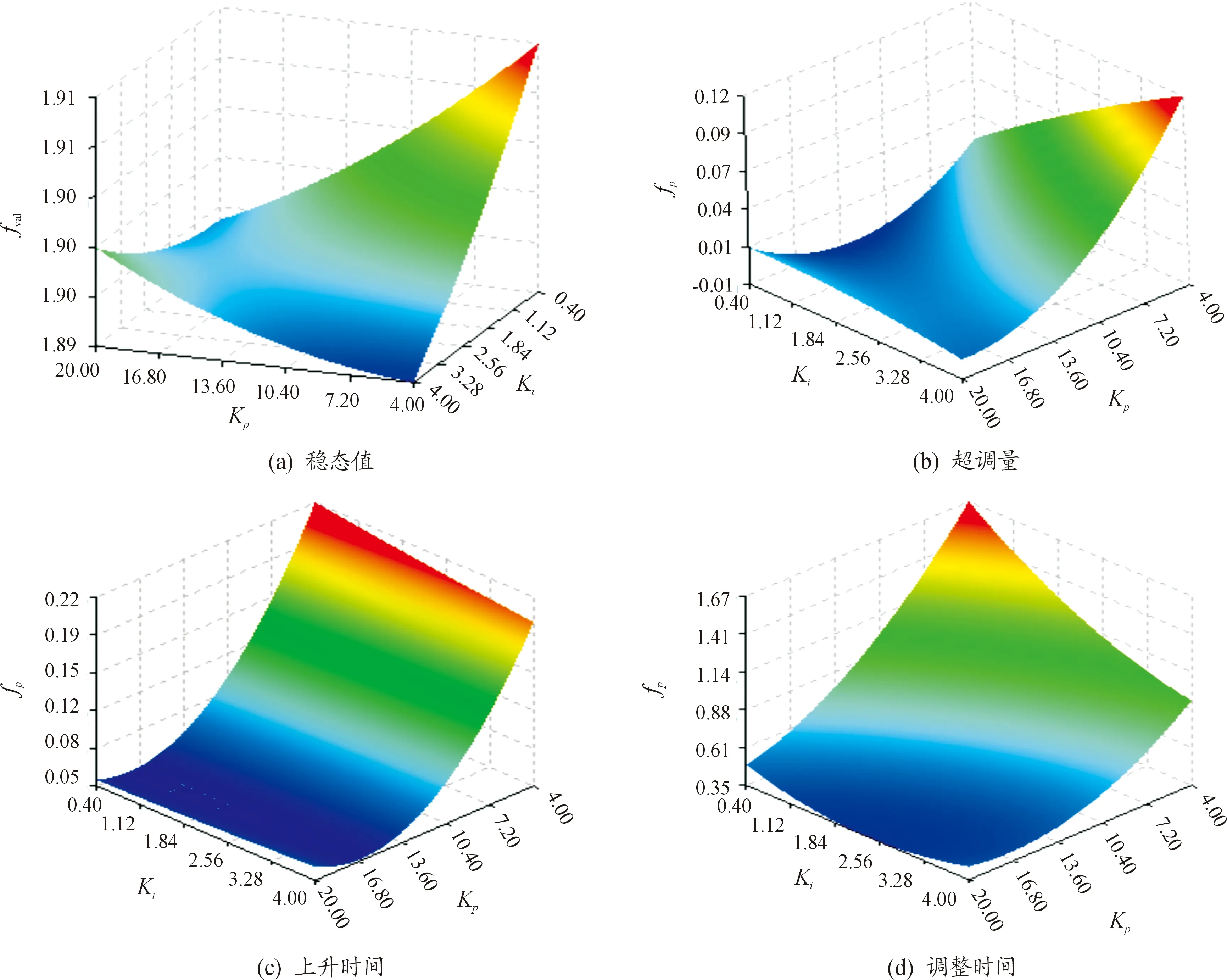
图6 主要性能参数的响应面
基于拟合的响应面模型和式(1)~式(4),利用一次可靠度法进行可靠度计算,得到了初始设计方案情况下各性能参数满足要求的可靠度(见表2)。可以看出,除运动精度满足要求的可靠度较高外,超调量满足要求的可靠度较低,而上升时间、调整时间无法满足指标要求。
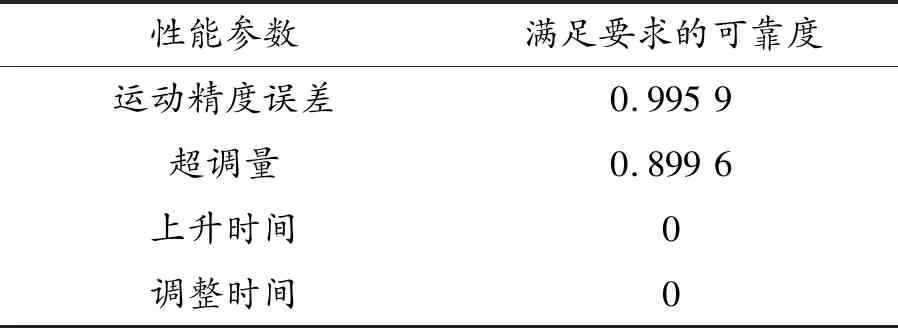
表2 可靠度分析结果
可靠性灵敏度主要通过计算重要性灵敏度和参数灵敏度,确定各随机变量及其参数的重要程度[8]。其中,重要性灵敏度的计算表达式如下:

(6)
式中:β为可靠度指数,满足R=Φ(β);y为x的等效标准正态随机变量向量,一般通过构造Nataf分布,并进行相应变换得到[9];L为y的相关系数矩阵经过Choleskey分解得到的下三角矩阵;μ是与y相对应的独立标准正态随机变量向量,满足μ=L-1y。
参数灵敏度的计算表达如下:
(7)
式中:θ为随机变量x对应的均值或标准差向量;T(x)为μ与x的变换函数;σ=[σij]n×n,当i=j时,σij为第i个随机变量的标准差,当i≠j时,σij=0。

1) 稳态可靠性的参数灵敏度结果
从图7可以看出,影响稳态可靠性的主要参数为gain1、gain6,这与试验设计相关性分析的结果是一致的。
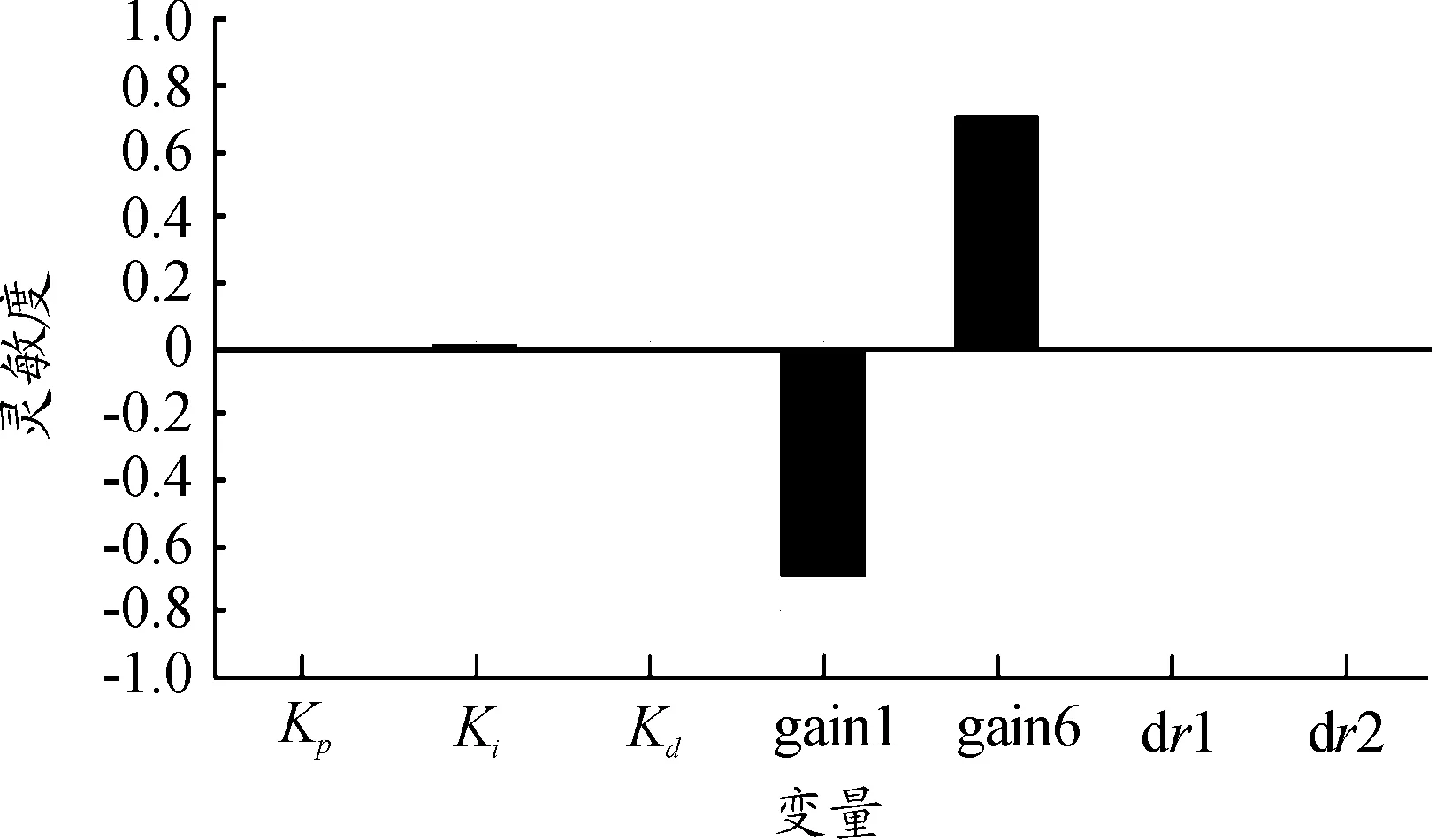
图7 稳态可靠性的参数灵敏度
2) 超调量可靠性的灵敏度结果
从图8可以看出,在PID控制策略下,Kp和Ki对超调量的可靠性影响比较大,为超调量可靠性的主要影响因素,提高Kp比例系数,降低微分系数Ki可以提高超调量可靠度。Kp对稳态可靠度、超调量的影响如图9所示,超调量随着Kp的增大而变大。其他输入变量对超调量可靠性的影响较小。超调量可靠度的总体水平偏低。
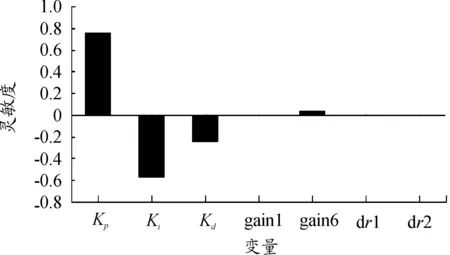
图8 超调量可靠度的参数灵敏度
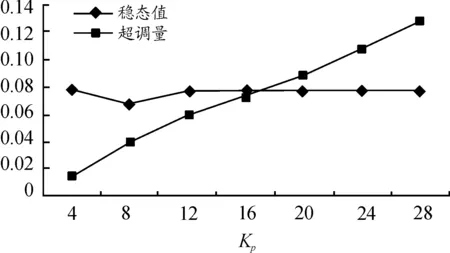
图9 Kp与稳态值、超调量的关系曲线
3) 上升时间可靠性的灵敏度结果
从图10可以看出,提高比例系数Kp,降低微分系数Kd可以提高上升时间可靠度。上升时间显然不满足设计要求。

图10 上升时间可靠度的参数灵敏度
4) 调整时间可靠性的灵敏度结果
从图11可以看出,提高比例系数Kp,降低微分系数Kd可以提高调整时间可靠度。调整时间可靠度显然不满足设计要求。
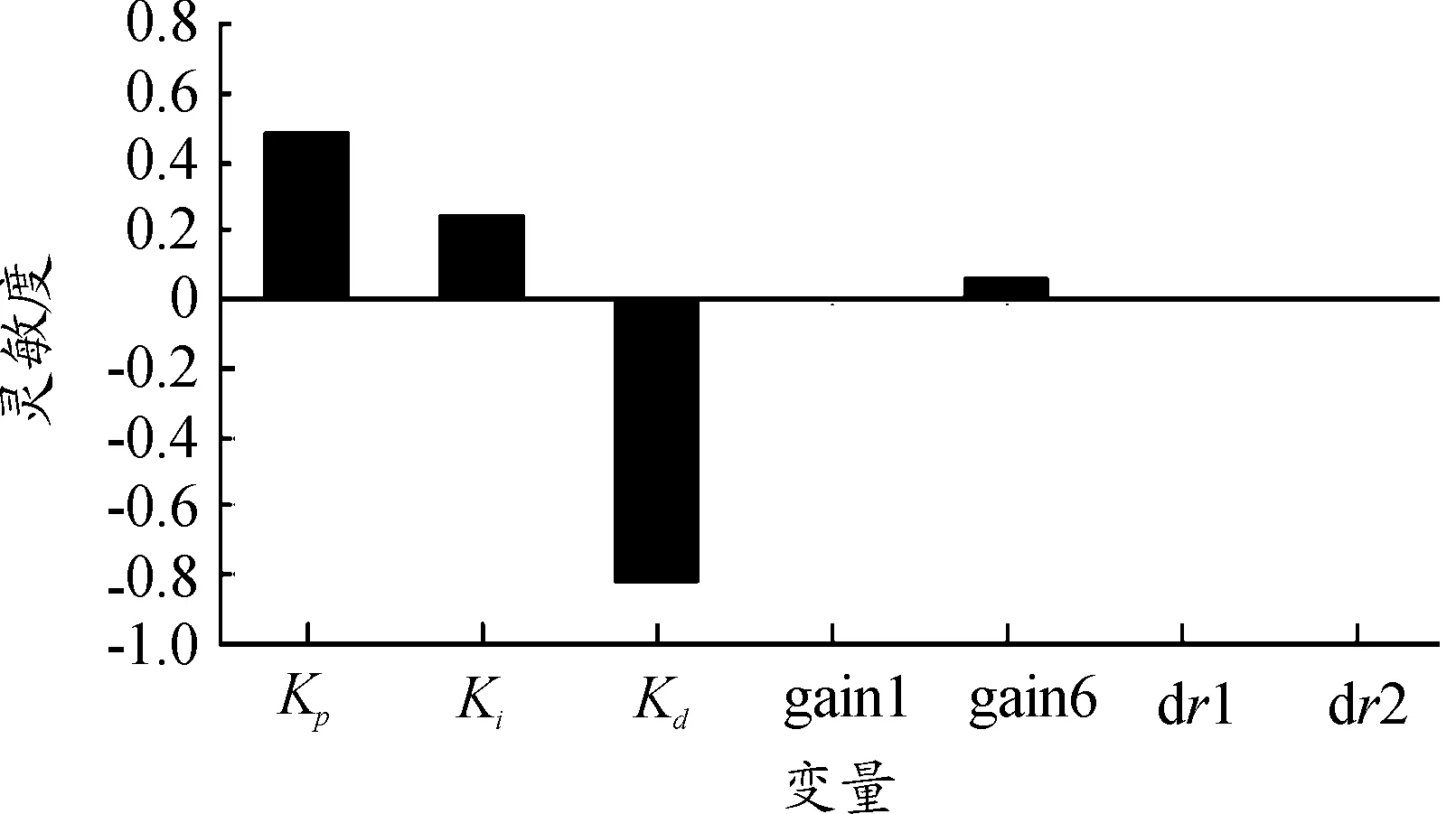
图11 调整时间可靠度的参数灵敏度
3 可靠性优化
初始设计方案的可靠性显然不满足指标要求,因此以Kp、Ki、Kd、gain1、gain6为设计变量,以运动精度误差最小为目标,并设定稳态可靠性、超调量、上升时间、调整时间的性能可靠度约束大于0.999,建立可靠性优化模型
(8)
在上述的可靠性优化模型中,用多个可靠度约束函数R的概率大于或等于期望可靠度来表征设计是否可行,可靠度约束函数本质上是设计变量、随机变量的隐式复合函数,无法直接利用现有的优化算法求解,一般情况下,考虑一个响应Y(d,X)和最大容许的响应水平b常用功能函数来表示,定义为
G(d,X)=b-Y(d,X)
(9)
显然,为了考虑所有发生不可接受行为的可能需建立多个功能函数。这里需要强调下,功能函数等于0构成的曲面通常称为极限状态曲面。
功能函数G(d,X)>0的概率,即可靠度可以用式(10)来表示。
(10)
式中,hX(x)是X的联合概率密度函数。
通常情况下直接计算式(10)很困难甚至不可行,一个常用的方法是采用蒙特卡罗仿真。但是当可靠度很高时(例如接近1时),蒙特卡罗仿真的计算量很大。在可靠性领域,广泛采用Hasofer、Lind、Rackwitz等提出的一次可靠度法(First Order Reliability Method,FORM)来计算式(10)。
由于优化过程中需要反复进行可靠度约束评估以检查设计点是否可行,所以可靠度约束的处理方式是可靠性优化求解的关键问题,会影响优化效率、精度和稳定性。目前常用的可靠性优化方法都是采用转换的策略,迭代过程中按照一定的方式将可靠度约束转换为不包含随机变量的确定性约束,从而将概率约束优化问题转换为常规确定优化问题,再利用常规的优化算法如序列二次规划法实现问题的求解。
目前在可靠性优化过程中比较常用的可靠度约束的处理方式主要有可靠度指标法(Reliability Index Approach,RIA)和功能度量法(Performance Measure Approach,PMA)[11-13]。
可靠度指标法本质上是将可靠度约束转化为了一个不包含随机变量的近似的确定性线性约束。如果问题具有多个可靠度约束,则对每个可靠度约束都采用相同的近似处理办法,分别构造各自的线性近似,最终建立原问题的序列近似规划模型[14]
(11)
可靠度指标法可以直接将可靠度算法和常规的优化软件结合起来,但由于每次外层优化都需要进行完整的可靠度分析,总体的数值效率较低。当采用基于梯度的优化算法时,需要高效的计算可靠度指标关于设计变量的偏导数[15]。
功能度量法是借助所谓的逆可靠度方法来表征可靠度约束的方法,其原理基于如果当概率功能度量gi(d,u*)=0时,则功能函数的实际可靠度指标恰好等于逆可靠度分析给定的可靠度指标βtol,因此优化过程中可以根据gi(d,u*)是否大于0来评定是否满足可靠度指标要求。这样,式(8)可以表示为:
minf(d)
s.t.g(d,u*)>0
(12)
式中u*是通过逆可靠度分析确定的逆可靠度最可能失效点(Most Probable Point,MPP),可以通过求解如下的优化问题获得:
ming(d,u)
s.t. ||u||=βtol
(13)
式(13)通常采用改进均值法[12]迭代格式计算,如式(14)所示。
(14)
迭代初值可取标准正态空间的原点,当u*=uk+1小于容许误差ε时,即可求得u*=uk+1。
将功能函数在当前设计点dk泰勒展开,得到
(15)
这样通过逆可靠度分析,本质上是将可靠度约束转化为了一个不包含随机变量的近似的确定性线性约束。如果问题具有多个可靠度约束,则对每个可靠度约束都采用相同的近似处理办法,分别构造各自的线性近似,最终建立原问题的序列近似规划模型
k=1,2,…
minf(d)
s.t.gi(dk,u*)+▽dgi(dk,u*)T(d-dk)≥0
(i=1,…,n)
(16)
已有的研究表明PMA比RIA更加稳定,这是由于求解式(13)时已知可靠度指标。更进一步研究表明,与RIA相比,PMA法更适于处理不起作用的概率约束问题。已有学者提出了不同的逆可靠度方法来求解可靠性优化问题[16-21]。因此采用概率功能度量法,在优化过程中将可靠度约束转换为不包含随机变量的确定性约束,再利用序列二次规划算法求解,主要算法流程如图12所示。
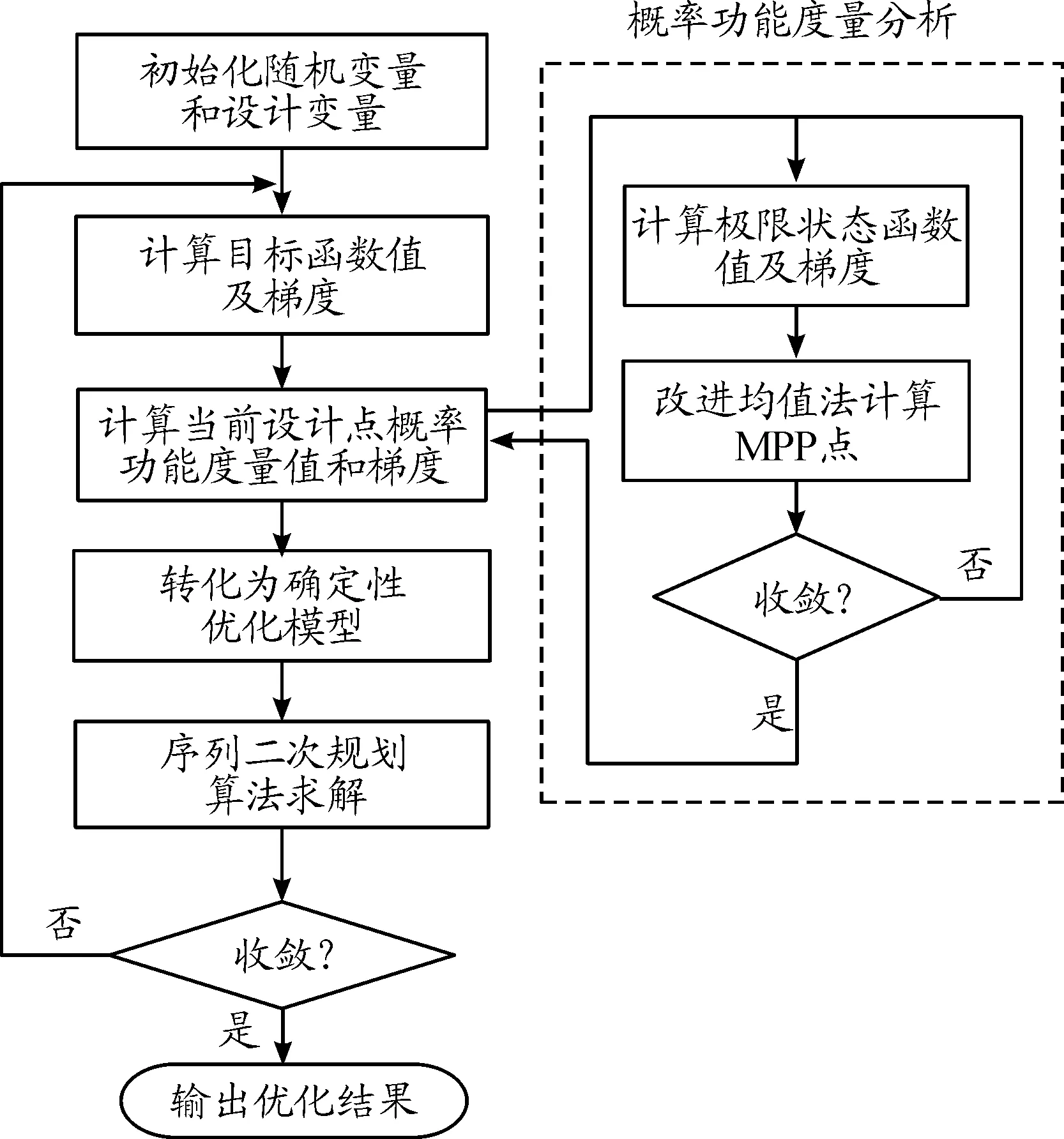
图12 可靠性优化算法流程框图
为作为对比,不考虑参数随机性建立了常规优化模型(式(17)),也进行了优化,最终得到的可靠性优化和常规优化结果如表3所示。
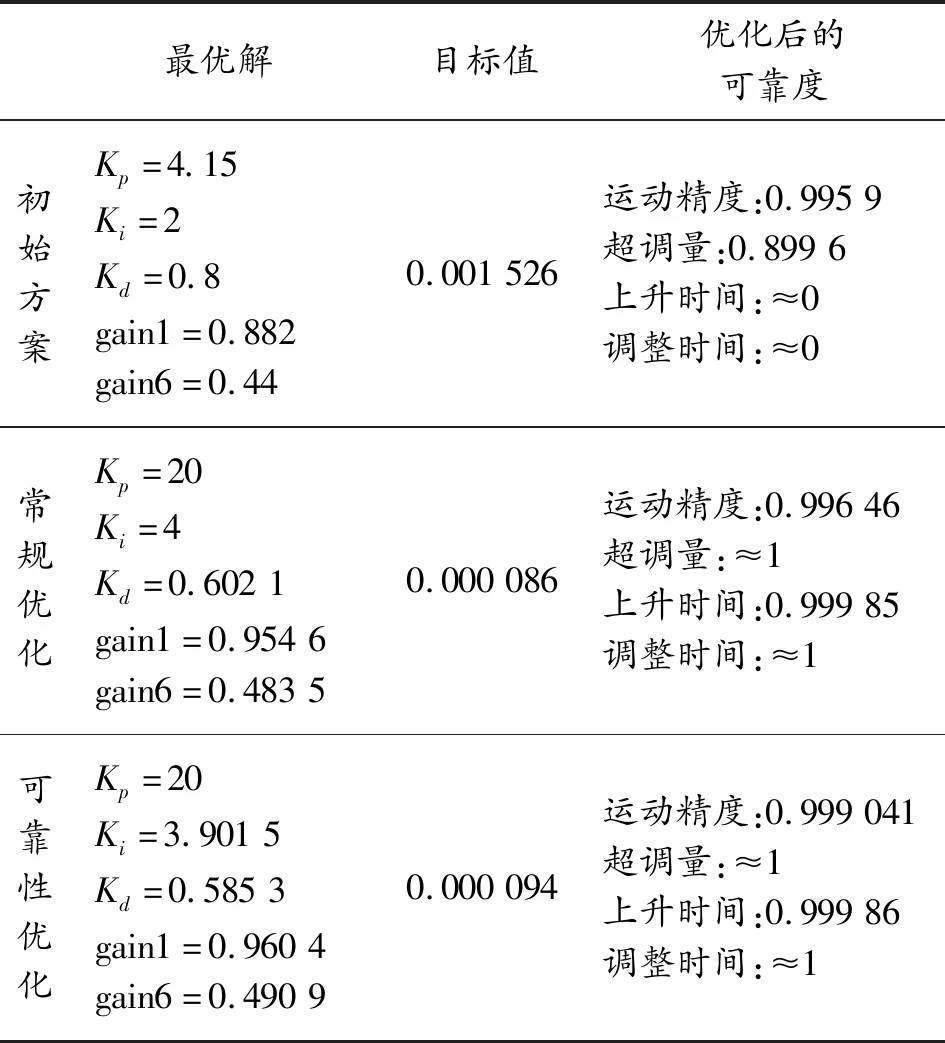
表3 可靠性优化结果
(17)
可以看出,常规优化和可靠性优化均有效减小了运动精度误差。可靠性优化结果均满足设定的可靠度大于0.999的要求,而常规优化由于无法直接在模型中考虑可靠性要求,导致运动精度可靠度略低。图13为可靠性优化后,其他变量用优化后的结果,Kp变动时对稳态可靠度、超调量的影响,可以看出,Kp对稳态可靠度的影响很小,对超调量的影响比较大,Kp过大时会导致超调量过大。图14为利用优化结果重新进行的仿真分析,可以看出,与初始设计方案、常规优化方案相比,可靠性优化确定的电动舵机控制参数设计方案具有更好的性能和可靠性。
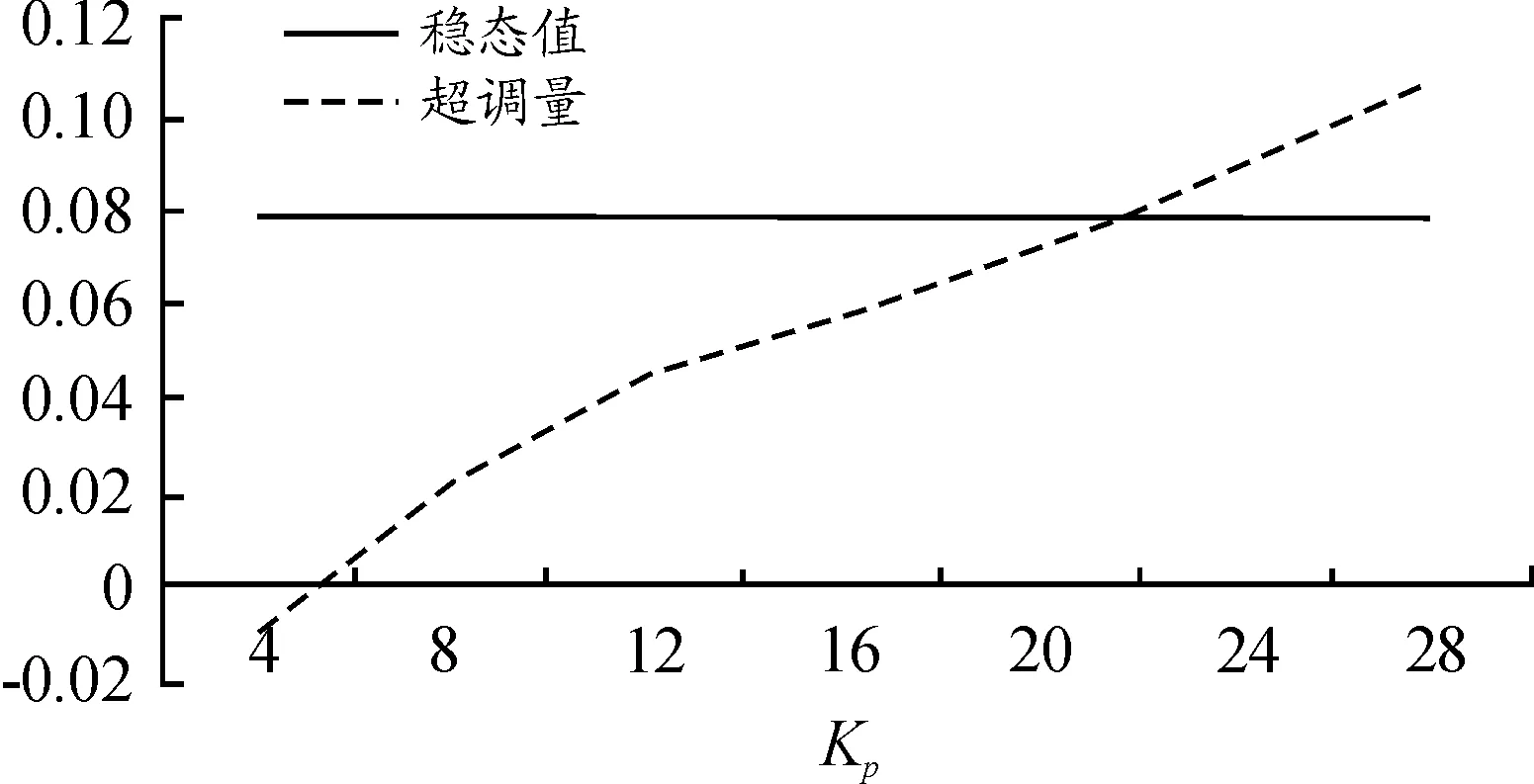
图13 优化后Kp与稳态值、超调量的关系曲线
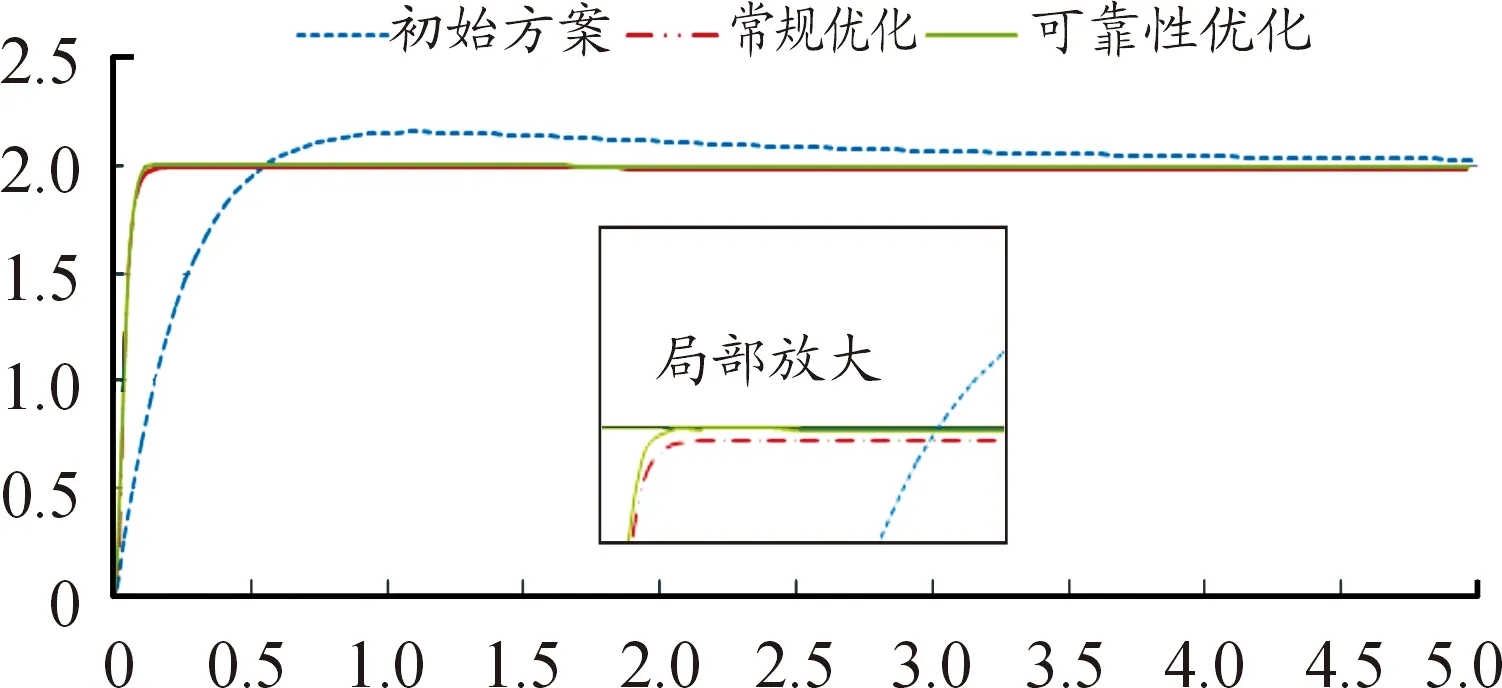
图14 优化后1 V信号下舵机的响应曲线
4 结论
本文结合在研的某型电动舵机,针对动作不到位、频响缓慢、超调等整机性能故障,利用MATLAB SIMULINK和MSC.ADAMS软件建立了控制系统的动力学仿真模型,利用仿真软件提供的数据接口,基于可靠性分析软件建立了参数化的电动舵机控制系统的可靠性仿真模型,一方面通过参数化的数据接口实现了电动舵机控制参数的随机性分析,另一方面实现了参数化的电动舵机控制系统可靠性仿真,并进行了超调量、上升时间等性能可靠性分析;在此基础上,将上述分析的4个性能可靠度作为约束,以运动精度误差最小为目标建立了电动舵机控制系统的可靠性优化模型,并通过选择合适的优化算法求解,得到了优化的控制参数设计方案。与常规优化结果对比表明,基于该设计方案的电动舵机具有更好地性能和可靠性,能够为设计电动舵机控制系统提供有效的设计依据。
猜你喜欢
中国生物化学与分子生物学报(2022年6期)2022-09-06
大电机技术(2022年4期)2022-08-30
农业工程学报(2022年10期)2022-08-22
上海师范大学学报·自然科学版(2022年3期)2022-07-11
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21