基于滑移条件下的履带车辆剪切位移特性试验研究
2021-04-09 11:01王志波宋海军
兵器装备工程学报 2021年3期
王志波,李 军,宋海军,张 宇
(陆军装甲兵学院 车辆工程系, 北京 100072)
履带车辆因其良好的机动性能,被广泛的应用到军事领域。军用履带车辆主要用于复杂地形作战,良好的制动性能对车辆的机动性能和安全性能起决定性作用。地面提供给履带车辆的制动力主要由接地履带板对地面的剪切作用产生,分析履带车辆接地履带的剪切位移规律,对研究履带车辆的制动力和机动性能都有一定的指导意义[1-2]。现有技术中,提升履带车辆制动性能的手段主要是优化履带车辆的制动方式、控制系统及制动器结构[3-9],而忽略了对制动过程中制动力的来源进行研究。尽管可以通过各种技术在最短的时间内制动履带,使履带在地面上实现完全滑移剪切,但地面提供给履带的制动力不足,也会使车辆的制动距离拉长,导致制动性能降低,影响履带车辆的机动性能。
本文自主设计了一种基于滑移条件下研究履带剪切位移规律的测试采集系统,能准确测量接地履带履带板的微观剪切位移,反映履带车辆真实滑移剪切情况,可用于履带车辆制动力和附着力的计算研究,实现履带车辆运动轨迹的精确控制[10-11]。通过该测试采集系统进行了实车滑移剪切位移数据采集,对某型履带车辆剪切位移规律进行了总结和分析,该剪切位移规律对指导履带车辆制动力的计算有一定的指导价值。
1 履带滑移剪切位移测试采集系统
本测试采集系统为试验室自主设计,能够方便准确地对履带车辆接地履带的位移进行实时测试采集。测试采集系统包括硬件部分和软件部分。硬件部分包括激光传感器、反光板、传感器固定支架和反光板固定架,软件部分通过 Modbus RTU协议编程实现对数据的采集。激光传感器的频率为20 Hz,精度可达±1.5 mm+D*0.5‰,具有快速率和高精度等特点。
试验中为避免传感器之间相互干扰,激光传感器通过间隔25 cm左右分层布置,如图1所示。激光传感器及其支架在履带车辆一侧前后两端布置,激光传感器和反光板通过分层布置、一一对应,如图2所示(1表示激光传感器支架,2表示反光板支架)。这样布置的优点是能够放置更多的反光板和激光传感器,采集更多块履带板的剪切位移值。该测试采集系统既保证了尽可能采集多块履带板滑移剪切位移数据,又保证了采集数据的准确可靠性,对准确测量接地履带履带板的微观剪切位移和计算履带车辆制动力、附着力的大小意义重大。

图1 激光传感器及其支架示意图
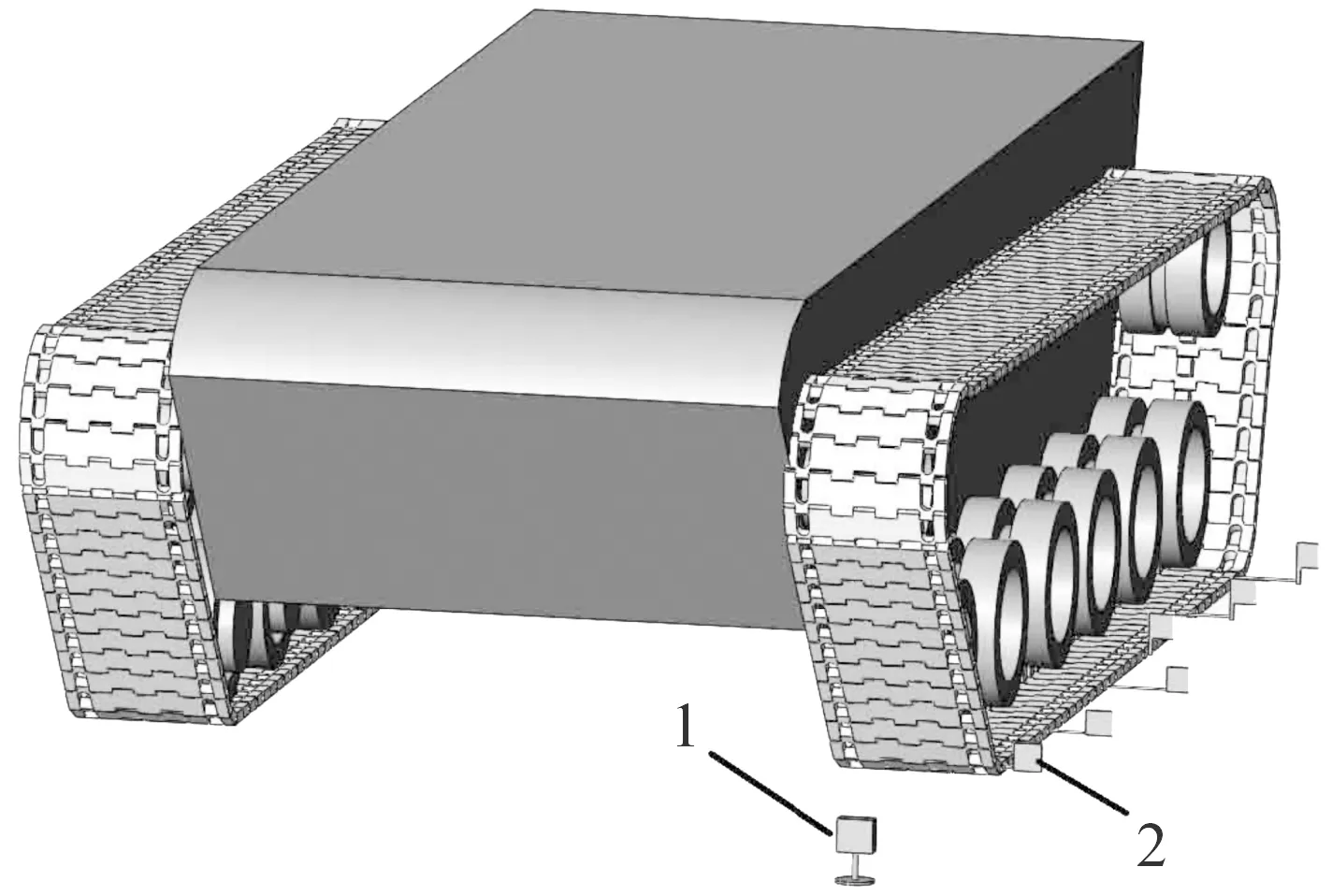
图2 履带上反光板布置及激光传感器布置示意图
2 实车试验
试验用被测履带车辆使用的履带板体为接地挂胶履带。全车共两条履带,每条履带由89节履带板组成,其中约30块履带板接地。履带为双销挂胶结构,由履带板总成(含挂胶履带销)、诱导齿、内六角螺栓、限位块、端联器、螺栓等组成,如图3所示。
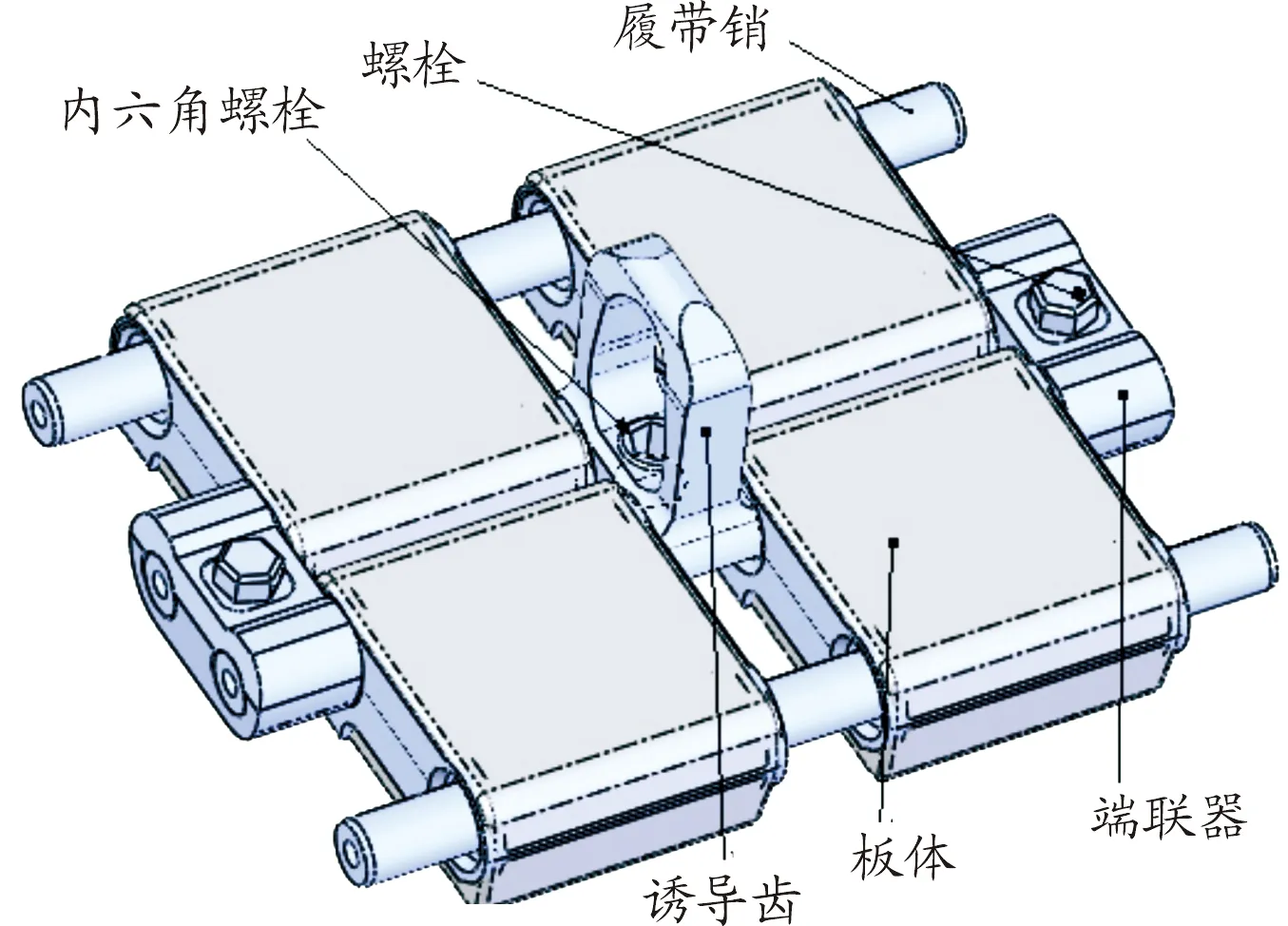
图3 挂胶履带板总成示意图
试验用牵引车辆为某液压牵引履带车,该车配有绞盘抢救装置,包括主绞盘和副绞盘。牵引力通过液压装置进行牵引,能够较平稳的控制牵引速度。
试验场地路面条件为良好的水泥路面。试验前,先在被测履带车辆履带板上分层间隔布置激光反光板,履带车辆一侧履带前后布置传感器支架及激光传感器。履带车辆试验过程中,通过操纵装置使被测履带车制动带与制动鼓结合,用牵引车牵引被测履带车辆的前部挂钩,使被测履带车辆接地履带在地面上滑移,直至履带接地段最后端的一块履带发生滑移位移,采集系统连续采集位移传感器的输出,进而完成履带车辆履带滑移位移特性的测定。此滑移过程能够反映履带车辆行驶制动过程中接地履带相对于地面的滑移剪切全过程。通过对数据的采集、分析处理即可得到履带车辆实际制动过程中履带板在地面上的剪切位移规律。
3 试验数据分析
经过实车试验,在时间51 s内,每秒每个激光传感器采集4次,共采集205次,得到51 s时间内12块履带板的位移变化数据值,如图4所示。履带车辆接地履带上反光板的布置顺序从前到后依次为反光板1、反光板2、反光板3、反光板4、反光板5、反光板6、反光板12、反光板11、反光板10、反光板9、反光板8、反光板7。在采集点145左右可以看出(图4中所示的虚线),履带板滑动是从前往后逐块移动,并不是同时移动,由此可分析得:试验用履带车辆的履带受履带销间隙、负重轮及悬挂装置的影响,并非是刚性的,导致每块履带板对地面的剪切滑移不是同时进行的。
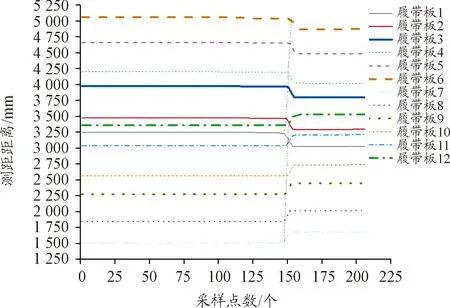
图4 履带板的位移变化曲线
履带板的剪切位移可以用牵引过程中履带板的实时位移减去履带板相对地面滑移前的初始位移来表示。实车试验过程中,标记的12块履带板相对与地面的剪切位移如图5所示。图6表示为第一块履带板开始滑动剪切直至最后一块履带板滑动的全过程,图7表示为牵引过程结束,牵引绳放松直至车辆稳定的全过程。在图5中可以看出,51s的试验数据中,其实牵引过程只有24s左右,其余时间为准备牵引和牵引结束阶段。通过对图中数据分析可得:
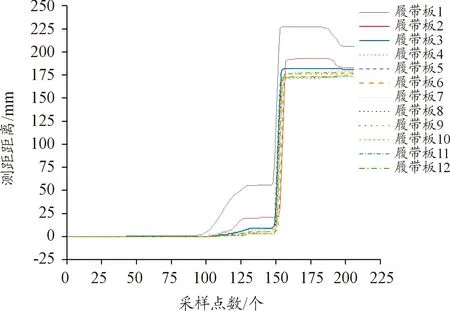
图5 履带板的剪切位移变化曲线
1) 图6中可以看到,采样点98点处,1号履带板先开始滑移,其次为2号履带板。采样点130处,1号履带板剪切位移量达54 mm,2号履带板达20 mm,3~12号履带板剪切位移值很小。分析原因为:在反光板固定架安装时,1、2号固定架安装在被测履带车辆前部,牵引试验时,火炮身管伸向车辆后方,由于车辆重心及悬架特性,车辆身体整体后倾,导致1、2号两块履带板没有接地,牵引时,在牵引力和悬挂装置的作用下,该被测履带车辆前端出现些许下沉,带动1、2号履带板向前下方转动与地面紧贴,履带板带动反光板向激光传感器方向转动,导致出现较大的剪切位移量。图8所示履带前部没有压实地面,进一步验证了本研究的判断。
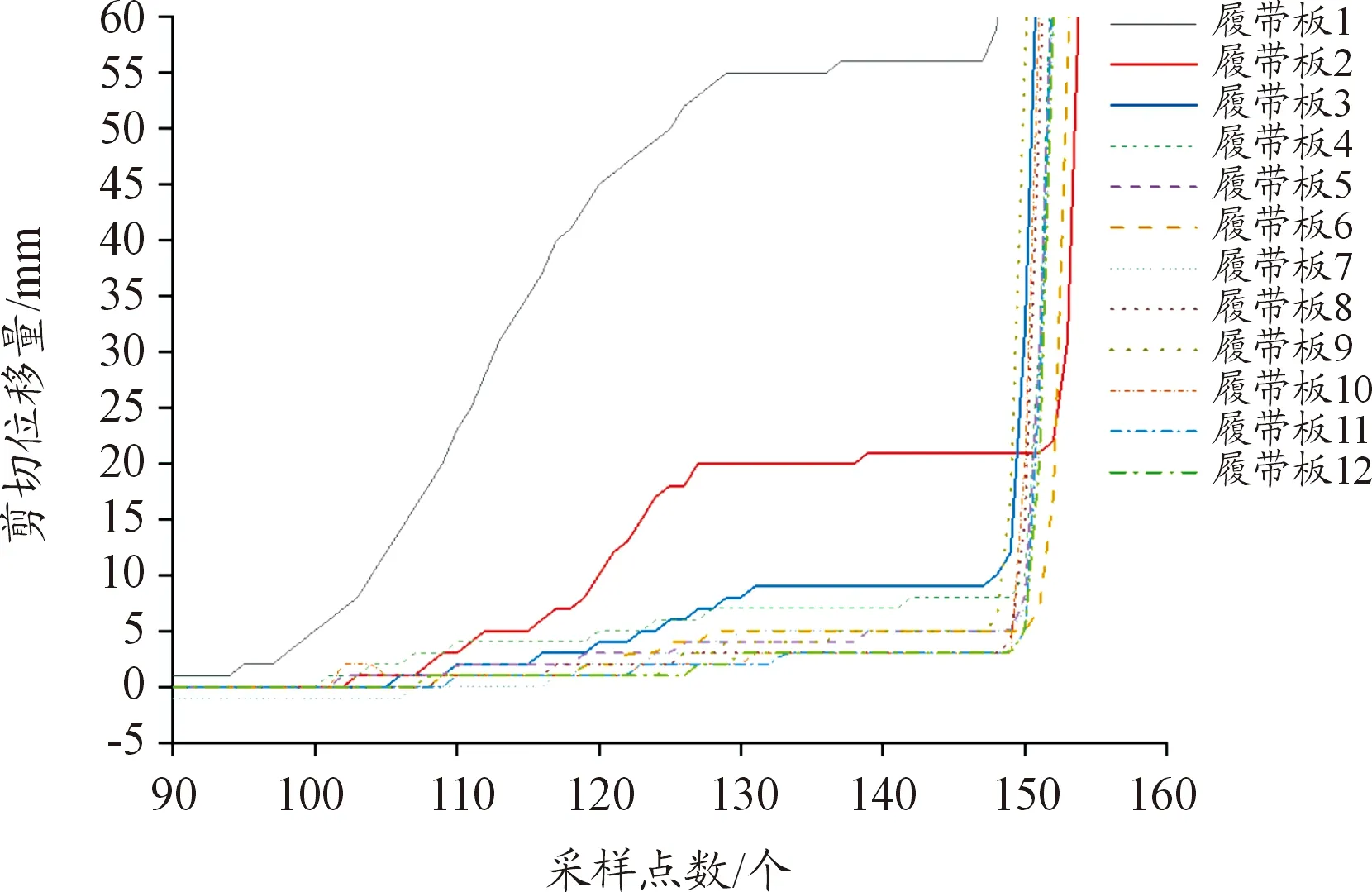
图6 履带板的剪切位移曲线
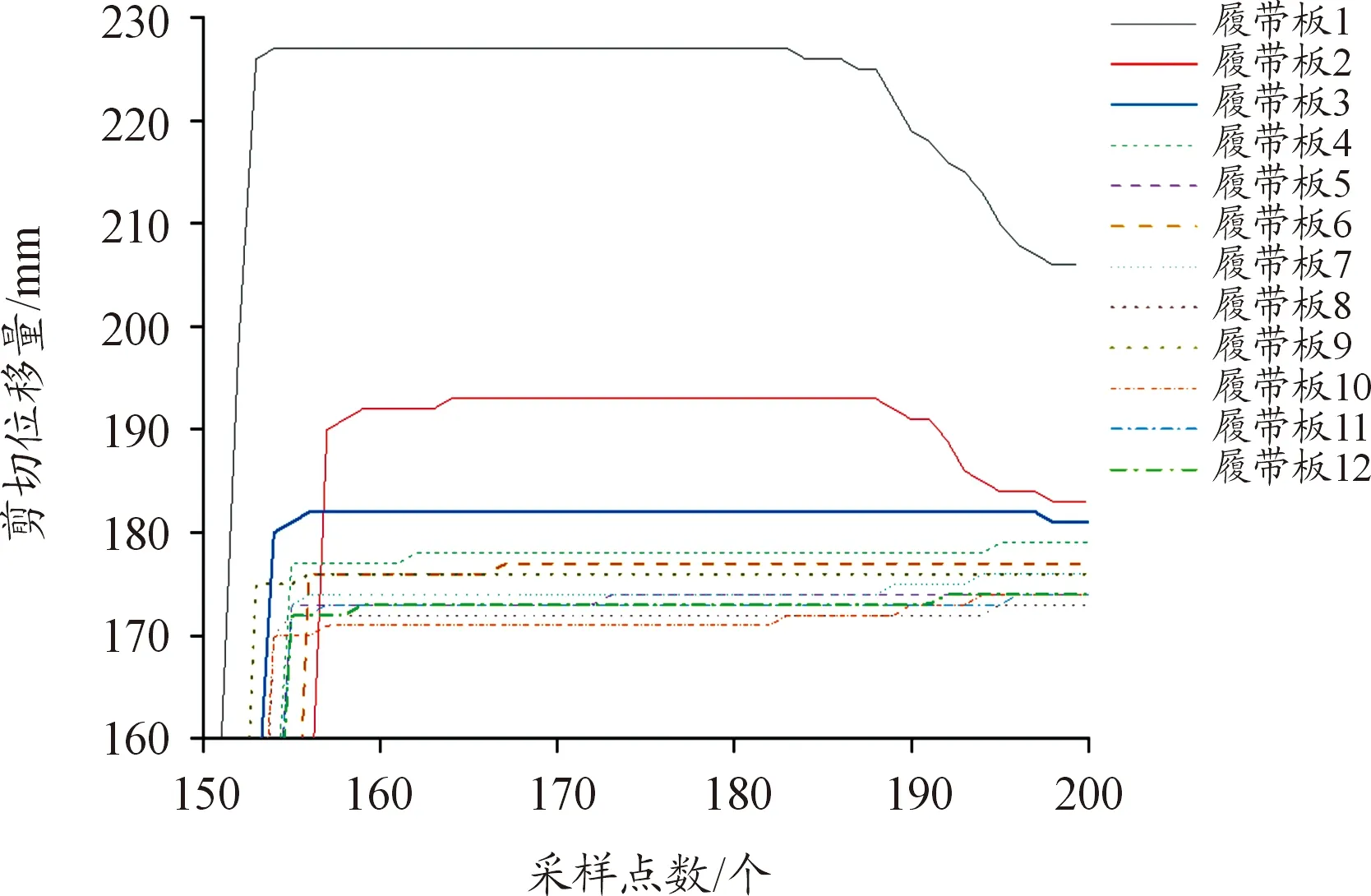
图7 履带板的剪切位移曲线

图8 履带前部没有压实地面示意图
2) 在100至148采样点之间,可以看到,履带板的滑动是从前到后依次滑动的,如图6所示,首先是1号履带板开始滑动,然后依次为2号、3号,…,11号、12号履带板滑动。分析原因为:该被测履带车辆履带销使用了挂胶技术,如图9所示,橡胶圈被黏结在履带销上,并且被一起压入履带销耳内, 在牵引力的作用下履带销上的橡胶圈从前到后依次被压缩,所以导致履带板从前到后依次滑动。在148至160采样点之间,由于履带销上的橡胶圈均被压缩,接地履带的纵向弹性被消除,此时履带可以看成是刚性的,12块履带板的滑移剪切是一致的。

图9 履带销上的橡胶圈
3) 图7中,在采样点154左右,牵引过程结束,3~12号履带板停止剪切滑动,随着牵引车牵引绳的放松,牵引力逐渐降低,在采样点185到197采样点之间,受车辆重心、身管及悬架特性的影响,车辆整体回弹平衡,导致1、2号履带板微微抬起,履带板带动反光板向后转动,导致采集到1号、2号履带板的剪切位移量降低。
4 结论
本文利用车辆—地面力学理论、激光测距原理和Modbus RTU协议等理论,自主设计了一套研究履带车辆接地履带滑移剪切位移规律的测试采集系统。该测试采集系统为履带车辆制动滑移过程中履带板相对地面剪切位移量的测试提供了技术支撑。
通过对某型履带车辆制动时接地履带滑动剪切位移的实车测试,经数据采集与分析后,发现制动时履带板的剪切位移并非全程都是一致的,每块履带板剪切位移量的大小受到履带系统结构、履带的纵向弹性、悬架特性、车辆重心位置等因素的影响。对于双销履带结构而言,制动初期履带剪切位移受履带销上橡胶圈的影响,履带板剪切量不是相等的,只有当所有履带销橡胶圈被压实,这时履带才可以看成刚性履带,此时每块接地履带板的剪切位移值是相同的。
猜你喜欢
发明与创新(2022年28期)2022-11-22
力学与实践(2022年3期)2022-07-02
北京航空航天大学学报(2022年5期)2022-06-06
专用汽车(2022年2期)2022-04-05
今日自动化(2021年2期)2021-10-14
创新作文(1-2年级)(2017年11期)2018-04-17
科技资讯(2016年18期)2016-11-15
学生之友·最作文(2014年5期)2014-07-09
坦克装甲车辆(2000年6期)2000-06-13