
计及道路阻断的智能消防机器人路径规划策略
2021-04-12 08:30何光层桑文君
科技风 2021年6期
何光层 桑文君


摘 要:合理的运行路径规划对保障智能消防机器人的可靠运行意义重大。针对消防机器人路径规划问题,文章在对A-Star算法原理及动作过程进行深入分析的基础上,建立了适用于智能消防机器人的路径规划模型。之后,考虑到火灾现场存在的道路阻断问题,文章基于贪婪思想,提出了一种智能消防机器人路径修正策略。仿真结果表明,所提智能消防机器人路径规划与修正方案能够较好地解决火灾现场存在的道路阻断问题,有效提升消防机器人路径规划的合理性与可靠性。
关键词:智能消防机器人;道路阻断;路径规划与修正;贪婪思想
智能消防机器人的快速就位对降低火灾损失,最大限度保障工作人员安全意义重大。为最大限度减小消防机器人移动时间,需要在对相关信息进行合理收集的基础上,针对消防机器人的移动路径进行合理规划[1]。
蒋新松[2]将路径规划定义为:路径规划是自主移动机器人的重要组成部分,并根据一些评估标准,在障碍物环境中找到了从原始状态到目标状态的无碰撞路径。基于环境模型的路径规划方法,可以在完全已知的环境下实现路径规划,具体包括:迪杰斯特拉算法、A-Star算法、可视化图方法和拓扑方法等[3]。
火场形式瞬息万变,受火势蔓延等因素影响,区域的障碍物分布情况将发生变化,进而影响区域内部路径的可通过性,最终导致消防机器人原始运行路径不再适用。考虑到当外部环境发生变化后(道路阻断出现),现有路径规划方案方法存在的效果不佳问题,有必要针对火灾现场的消防机器人路径规划策略开展进一步研究工作。
本文在针对智能消防机器人路径规划算法开展深入研究的基础上,选取A-Star算法作为路径规划算法,在针对火场存在的道路阻断问题给予充分考虑的基础上,基于贪婪思想提出了一种使用于智能消防机器人的路径重规划策略,以保障消防机器人路径规划的可行性。
1 智能消防机器人路径规划
合理的路径规划策略有助于智能消防机器人快速抵达起火点,进而有效提升消防机器人灭火可靠性。A-Star算法作为一种启发式算法,因在静态环境具备极高的搜索效率在最短路径规划领域收获了广泛关注[4]。A-Star算法最短路径计算流程如下:
(1)基于机器人所处空间环境信息,建立外部空间栅格地图及对应空间坐标系,创建open list和close list;
(2)根据消防机器人所处空间位置,确定机器人初始运行点作为搜索起点并加入open list中,通过与控制中心之间的信息交流,确定消防机器人路径规划终点。之后,重复如下过程:
①根据式(1)计算各拓展节点与目标节点之间的距离代价f(n),遍历open list,比较各拓展节点的距离代价值,选择f(n)值最小的节点加入close list中;
式中g(n)表示起点前往当前节点的移动代价,h(n)对应当前节点前往终点的估算成本。
②基于如圖1所示的八向搜索方法搜索该节点的8个相邻方格。如果不可抵达或在close list中并忽略它,否则执行如下步骤:a.如果它不在open list中,把它加入open list,把起点置为其父节点,记录该方格的f,g及h值。b.如果它位于open list中,则将g值作为判断标准,与原路径进行比较。若当前路径优于原始路径,则更新其父节点及g、f值。
(3)更新搜索起点,重新开始上述循环过程,直至终点加入open list或open list为空。
2 基于贪婪思想路径修正策略
贪婪算法是指在对问题进行求解时,不从整体上加以考虑,只根据当前状况选择对应的最优动作策略[5]。通过A-Star算法确定起点与终点之间的最短路径之后,消防机器人的移动轨迹也随之确定,只有在机器人通过相关感应设备实际探测到障碍物时,才考虑对机器人的移动路径进行重规划。
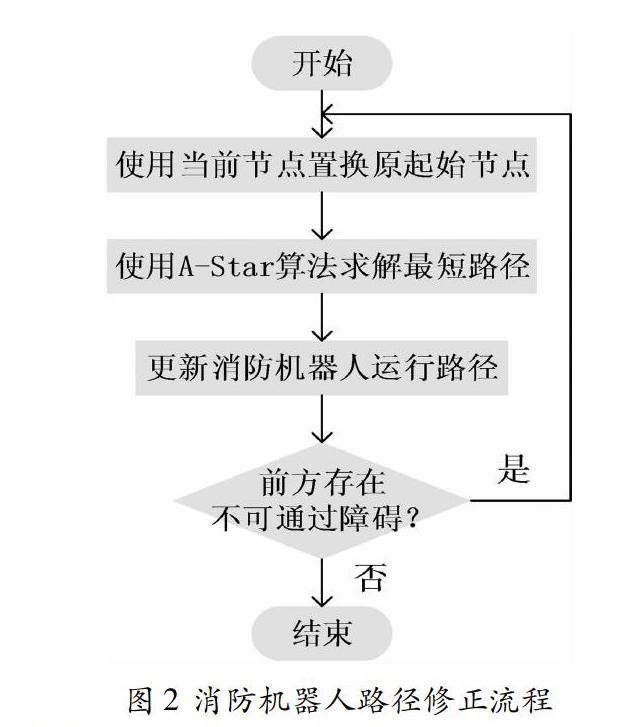
为最大限度降低机器人实际运行路径长度,本文基于贪婪思想,在机器人规划运行路径出现障碍物时,通过修正空间栅格地图,并更新路径规划起点的方式,针对机器人实际运行路径开展重规划工作,具体流程如图2所示。
为简化模型求解过程,本文假设当机器人运行前进方向与障碍物延伸方向相垂直时,消防机器人能够针对障碍物进行可靠监测,并据此确定其后续运行轨迹。
3 仿真结果
文章建立了30×30的虚拟栅格地图模型,并开展了相应的仿真分析工作,旨在检验所提路径规划与修正模型的有效性。A-Star算法搜索过程中的距离代价使用欧几里得距离进行描述。
假定正常情况下机房内部障碍物不会发生移动,机器人初始运行点坐标为(2,4),终点位于(28,25),此时通过A-Star算法求得的智能消防机器人路径规划结果如图3。可见,A-Star算法能够在存在障碍物的情况下,有效根据原始节点信息,确定消防机器人运行过程中起点与终点之间的最优路径。
基于贪婪思想的消防机器人路径修正结果列示于图4中。
如图所示,当由于火场情况变化导致图中灰色区域不满足通行条件时,消防机器人将在抵达深蓝色方格位置(21,22)时侦测到道路阻断信息,并通过在栅格地图上添加障碍物的方式针对场景地图开展修正工作。在此基础上,机器人通过调节A-Star算法路径搜寻起始点的方式,重新规划运行路径,以最大限度减少机器人运行里程。
4 结语
本文在对机器人路径规划算法原理开展深入研究的基础上,基于A-Star算法思想,建立了适用于智能消防机器人的路径规划模型。考虑到火灾现场存在的路径阻断问题,提出了一种基于贪婪思想的智能消防机器人的运行路径修正策略,通过对机器人运行路径进行平滑处理,以及运行路径重规划方式,旨在提升消防机器人的路径规划合理性与运行可靠性。分析表明,所提方案能够有效规划机器人运行路径,在引入三次样条插值平滑处理手段后,机器人运行路径的可行性得到了进一步提高。不可通过情况发生后,机器人可通过所提路径重规划方案及时修正路径,在充分保障路径可行性的前提下,最大限度减少机器人运行里程,提升火灾现场智能消防机器人的运行可靠性。
参考文献:
[1]杨旭,王锐,张涛.面向无人机集群路径规划的智能优化算法综述[J].控制理论与应用,1-12.
[2]Zhang Handong,Zheng Rui,Cen Yuwan.Present Situation and Future Development of Mobile Robot Path Planning Technology[J].Journal of System Simulation,2005,16(2):439-443.
[3]蒋新松.机器人学导论[M].辽宁科学技术出版社,1994.
[4]付丽霞,任玉洁,张勇,毛剑琳.基于改进平滑A-Star算法的移动机器人路径规划[J].计算机仿真,2020,37(8):271-276.
[5]白志亮,陈世利,贾乐成,曾周末.基于贪婪算法的汽轮机叶轮相控阵信号压缩感知[J].机械工程学报,2018,54(18):33-41.
作者简介:何光层(1984— ),男,汉族,陕西旬阳人,本科,高级工程师,研究方向:电力技术、设备管理等方面的研究;桑文君(1983— ),女,汉族,云南保山人,大专,助理工程师,研究方向:信息管理工作。
