变形飞行器发展现状及展望
2021-04-13 07:28孙安全张必聪
科技视界 2021年7期
孙安全 关 莉 张必聪
(1.空军装备部驻西安地区第五军事代表室,陕西 西安 710065;2.西安飞行自动控制研究所,陕西 西安 710065)
0 引言
变形飞行器是指在飞行任务过程中,飞行器能够根据飞行环境和飞行任务,局部或整体地改变飞行器的结构,使飞行器始终保持最优飞行状态。 变形技术不但能够改善飞行器的气动特性, 增强续航能力,隐身能力,机动性能,还能实现跨越介质,多栖使用[1]。将变形控制与飞行控制结合起来,可以利用变形辅助机动[2]。通过主动变形还可以延长部件疲劳寿命,增强飞行安全性能[3]。由于以上优点,变形飞行器成为了国内外研究热点。
美国的变形飞行器研发起步较早。 1979 年,美国宇航局就与波音公司联合启动了“自适应机翼”项目的研究,该项目利用柔性复合材料,使机翼外形主动发生变化[4]。 随后美国宇航局又推行了“主动柔性机翼”和“任务自适应机翼”。完成了这两个项目之后,美国又开展了“智能材料与结构验证”“变形飞行器”和“变形机构”等项目的研究。 随着研究不断深入,各式各样的变形飞行器逐渐出现在历史舞台上,其中最为著名的是洛·马公司的MAV 系列折叠机翼变形飞行器和NextGen 公司的MFX 系列滑动蒙皮变形飞行器。美国对变形飞行器的研究之路可以概括为:“变形飞行器”“自适应机翼”“主动气动弹性机翼”和“智能可变形飞行器[5]”。除美国外,欧盟也在2002 年启动了多项相关研究项目,包括“气动弹性飞机结构”“新一代飞行器概念研究”“智能固定翼飞行器”“变构型”等项目。
部分学者将变形飞行器按照机翼变化形式、变形产生位置等标准进行分类,无法涵盖变形飞行器的方方面面。 变形飞行器不仅仅是外形发生明显变化,流场变化、气体循环变化也应属于变形飞行器的范畴[3]。按照变形量的大小可以将变形飞行器分为三类[6]。 第一类是微小尺度形变,包括自适应鼓包和翼面微振动等;第二类是中尺度变形,包括进气道变形和机翼的厚度、弯度改变等;第三类是整体大尺度变形,展弦比变化超过200%,翼面积变化超过50%,后掠角变化超过20°的变形都属于此类[6]。也有学者认为当某一部位或参数的形变量指标超过50%,就应属于第三类[7]。按照变形尺度分类不但可以将所有种类的变形形式包含起来,更能体现变形给飞行器带来的影响以及该类变形的优势。 因此,本文将按照变形尺度分类标准来概述变形飞行器的发展现状,并对未来变形飞行器的发展和应用进行展望。
1 小尺度变形
小尺度变形是为了实现主动流动控制, 通过小的结构变化影响流场,以达到减弱附面层、抵消激波、稳定流动等目的。该项技术即“自适应机翼”技术。实现自适应机翼可以通过翼面微振动、自适应鼓包等方式。
翼面微振动技术通过在直升机桨叶中埋入主动控制单元,使机翼具有主动变形能力,又称为智能旋翼。 在桨叶发生振动时,这些主动控制单元能够产生微小形变,抑制结构振动,从而达到保护桨叶的目的。
智能旋翼的实现方法多种多样,包括:电致桨叶扭转技术,通过将压电越变(PZT)薄片嵌入桨叶中产生电致扭转或通过扭转板压电作动器产生电致扭转;智能纤维复合材料扭转技术,将PZT 纤维连续,平行地排列进环氧树脂层和聚酰亚胺电涂膜层。这两种实现方法都是将智能材料沿直升机桨叶展向连续排布。还有一类实现方法是通过控制桨尖扭转来控制整个旋翼的震颤,包括智能桨尖扭转技术和旋翼桨叶副翼驱动扭转技术。
美国开发了一种压电材料自适应旋翼。这种自适应旋翼能够产生-4°到12°的桨距变化,机动性比铰链式提高15%以上,功率消耗降低,质量减轻,旋翼雷达反射面积减小。 MD-900 直升机就应用了该种技术,其噪声和振动明显降低(见图1)。

图1 MD-900 上的自适应旋翼
然而,当前可供使用的驱动单元无法提供更大的变形力; 传感器信号采集与驱动单元控制无法稳定,有效实现;建模方法与真实情况匹配度差。 相关技术还有待进一步研究。
自适应鼓包技术是为了减小波阻。 飞行时,机翼的外形会发生变化,在激波区凸起一个鼓包,降低激波的强度,同时利用吸除技术平衡激波前后压力。 该技术可以有效降低波阻,不附加黏性阻力。
1992 年Ashill 等第一次提出了这一概念, 随后NASA 展开相关研究,在高压音速条件下,采用固定鼓包进行了验证,证明了该项技术能够有效降低翼型阻力。 然而,固定鼓包无法在全包线范围内提供有效的减阻效果, 研究人员又提出了自适应鼓包的概念(见图2)。 E.Jinks 等分析了自适应鼓包在多个任务状态下的表现,AV Popov, M Labib 等对鼓包变形控制进行了相关研究。

图2 一种SMA 自适应鼓包工作原理
小尺度变形结构依赖MEMS 技术的发展,当前已有大量的研究应用。 总体上看,微小变形技术较多地依赖于变形机构,需要强度高、韧性强的智能材料,也需要更为简单、高效的控制方法。
2 中尺度变形
中尺度变形是为了实现飞行控制性能的优化,通过机翼、机身连续,光滑的形状变化,或其他飞行器气动部件的可逆变形来提高飞机的操纵和控制性能。这种变形形式可以把飞机的气动弹性利用起来,辅助机动。实现中尺度变形的方式包括:机翼扭转、自适应后缘,导弹弹头的偏转,进气道和尾喷口的变形等。
主动气动弹性机翼(AAW)就是利用机翼扭转来增强战斗机滚转效能。AAW 通过机翼的法向扭转,协同前后缘操纵面,主动使机翼发生弹性形变。 由变形的机翼为飞机运动提供操纵力。因为整个机翼都参与控制力的产生过程,操纵面偏转量比常规机翼小。 F/A-18A 飞机上已经采用了该项技术,并进行了多次试飞验证(见图3)。

图3 主动气动弹性机翼F/A-18A
AAW 应用于F/A-18 后, 使其重量下降48%,刚度降低40%。 AAW 是无尾布局飞行器的有效控制手段,亚声速和超声速飞行器上均可应用,并能为飞行器提供更优秀的滚转操作效能。
美国Smart Wing 项目阶段2 实现了智能柔性翼后缘。 2014#2015 年,美国将之应用于湾流III 公务机上,并进行了22 架次的飞行试验。 该项目开展至今,已经能够使机翼后缘在-2°到30°范围内变化,有效减轻重量,降低起降噪声,节省燃料。
除了自适应后缘,还有变弦长、变厚度等多种中尺度变形形式。
2011 年, 宾夕法尼亚大学的Barbarino 等人设计有一款变弦长直升机旋翼(见图4),能实现高达30%的弦长变化。
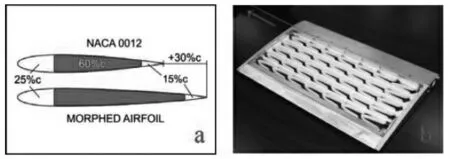
图4 一种变弦长机翼
变厚度机翼主要是为了降低阻力, 降低燃油消耗。 2012 年加拿大,魁北克大学的Grigorie 等人设计了一款变厚度自适应机翼结构(见图5),在机翼蒙皮下埋入记忆合金丝驱动结构变化。该自适应翼型能够有效地减小阻力,并将转捩推迟。

图5 一种变厚度机翼示意图
为了实现中尺度变形,大量的基于智能复合材料变形机构的研究被推进。比较典型的是应用压电陶瓷薄片设计的压电双片夹层弯/扭结构, 应用SMA 偏离基体结构带动基体结构发生弯曲或扭曲变形的SMA偏置布置弯/扭结构和应用SMA 丝制作的SMA 扭力管结构。
弹头变化能够有效地影响导弹的飞行轨迹。弹头相对于弹体轴线的变化可以产生气动力, 辅助机动。美国通过风洞实验验证了利用弹头偏转控制导弹飞行的可行性。Auburn 大学的Ron Barret 等应用压电致动器开发了一种弹头偏转机构(见图6),实现了0.12°的弹头偏转。中北大学王飞等就偏转弹头对火箭弹道的影响进行了分析研究,证明了偏转弹头可以修正弹道,增程率高达77%。 中国科学技术大学杨杰等采用SMA 丝致动器实现了8°偏转角的弹头偏转。
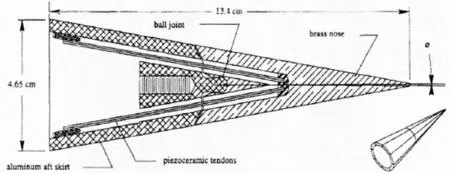
图6 一种弹头偏转机构
除这些气动外形发生变化的飞行器变形研究外,为了满足在不同速度、不同大气环境下的发动机流量和总压要求,进气、排气系统也可根据需要设计成可变形结构。
临近空间飞行器SR-71 采用的是J58 发动机。该发动机是一款涡轮机组和动力发动机,具有可以调进气道。进气道外罩、中心锥、前后旁门活路和尾喷口均可根据需要进行调整。美国针对涡轮基组合动力发动机展开了二元可调进气道研究。通过可调进气道解决了边界层问题和推进系统的模态转换问题。 B787 采用了V 形尾喷口,其起飞和降落过程中锯齿形的罩圈可以自动收缩、张开,能够提高发动机的效率,有效降低噪声。 尾喷变形的方式还有矢量喷管,现已成为战斗机的基本技术要求(如图7 所示)。

图7 B787 上的V 型尾喷管
中尺度变形可以部分替代舵面控制,通过气动部件变形来产生控制力,能够提高飞行器的控制效率。
3 大尺度变形
大尺度变形以面向任务的设计为主,通过大幅度改变飞行器的整体气动结构来使飞行器适应不同的飞行条件,完成相应的飞行任务。 主要的变形方式包括:变后掠、变展长、变翼面积和变翼型等。
20 世纪中后期,各种变后掠角飞行器在历史舞台上大放异彩,如美国的X-5、F-111、F-14 和B-1,前苏联的图-160 和米格-23 等。 变后掠能根据飞行速度调整后掠角,既能满足低速飞行时的升力、阻力要求,又能在高速飞行时延迟激波的产生,有效降低阻力。但是上述提到的飞行器大多数采用机械结构进行变形,能源消耗大且笨重繁琐,维护成本高,这些弊端远远超过了变形带来的优势,因此变后掠没有成为主流。
随着智能材料的发展,变后掠又逐渐回到研究者们的视野。 NextGen 的MFX-1 滑动变形无人机可以实现15°~35°的变后掠(见图8)。 该飞行器采用的是柔性变后掠结构, 铝条增强的硅橡胶类柔性蒙皮,翼面积和翼展也可发生大尺度的变化。 2006 年,Grant等人设计了一款多自由度变形飞行器,该飞行器每个机翼上包含两个转动关节,能够独立控制,实现多种形式的变后掠组合变形方案,具有优越的转向能力和侧风稳定性。智能材料与柔性变形为变后掠飞行器注入了新的能量。
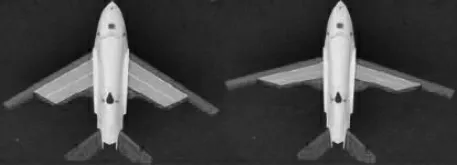
图8 MFX-1
小展长机翼可以达到更高的飞行速度,具有良好的机动性能,但升力特性较差,续航能力弱;大展长机翼续航能力好,但操控性能差。 因此根据飞行条件和飞行任务变化机翼展长也是一个重要的研究方向。1931 年, 俄国的Ivan Makhonine 设计的MAK-10 是第一款变展长飞行器, 其展长变化范围从13m 到21m,翼面积变化量可达57%。2004 年,马里兰大学的Blondeau 等设计了三段式的伸缩机翼, 变形量可达230%。 2016 年,南安普顿大学Ajaj 等设计了双翼梁变展长飞行器,翼展变化量达100%。
除了变后掠、变展长外,另一大尺度变形形式是机翼的展向弯曲、折叠。 该种变形形式能够通过翼面外弯曲实现飞行器姿态控制,减小阻力,增强其过失速性能。 其中以Lockheed Matrin 公司的Z 形翼变形方案最具代表性(见图9)。 该变形方案能够大范围改变翼面积,控制巡航阻力。 然而该类方案对变形部位的蒙皮要求苛刻,既要承担强大的气动载荷,又要保证变形面的光滑连续。 除了Z 型翼,Lee 等人还提出了一种柔性薄膜机翼,可以卷曲变形,能有效地提高机翼的气动性能。

图9 Z 形折叠翼示意图
折叠机翼的另一成功应用便是“鸬鹚”号变形无人机。 它可以从“俄亥俄”级潜艇的导弹管中发射出来,能够承受水下45.72 m 的压力。 在无人机弹出水面后,助推器开火,无人机脱离水面飞行。完成任务后可以在陆地着陆并被回收。该类无人机的出现极大拓宽了潜艇武器的实战效能,可以执行情报侦察、目标监视与打击、中继制导等多种任务,对于反海、反潜、防控和对陆作战用处极大。折叠机翼技术在其中发挥了重要的作用(如图10 所示)。

图10 柔性薄膜机翼的折叠状态(a)与展开状态(b)
4 未来发展
从历史发展的角度上看,在美国“变形飞行器结构”计划实施之前,变形飞行器的形式主要以小尺度和中等尺度变形为主,在“变形飞行器结构”计划实施之后,变形尺度逐渐扩大,并出现了NextGen 公司的滑动蒙皮变形飞行器和Lockheed Matrin 公司的折叠机翼变形飞行器等优秀方案。因此大尺度变形飞行器是未来发展的趋势。
然而,机翼大尺度变形对蒙皮而提出了更高的要求。 当前变形蒙皮研究一类以橡胶或记忆聚合物为主;一类依靠多段式变形;一类依靠波纹结构。第一类橡胶蒙皮容易出现界面脱粘,材料分离;第二类多段式蒙皮气密性差;第三类波纹结构表面凹凸不平容易引起阻力增大。因此既能满足变形需求又能保障气密性和表面平整度的蒙皮尚需要进行研究。

图11 “鸬鹚”号变形无人机
同时, 变形飞行器的应用场景也需要进行扩展。单一针对空中飞行任务设计的,以优化各任务阶段空气动力学性能为目的的变形飞行器潜力并不大。变形飞行器更广阔的应用场景在于多栖和多域飞行。
变形飞行器的研究和发展是漫长的。不论是变形驱动机构还是变形飞行器的建模与控制律设计都有待进一步的研究,其对于智能材料、结构设计、传感技术、信息处理、控制律设计等多学科领域的发展都将具有深远的意义。
猜你喜欢
西北工业大学学报(2023年2期)2023-05-12
客车技术与研究(2023年1期)2023-03-15
军民两用技术与产品(2021年5期)2021-07-28
北京航空航天大学学报(2020年10期)2020-11-14
环境卫生工程(2020年3期)2020-07-27
中国特种设备安全(2019年10期)2020-01-04
航空世界(2018年12期)2018-07-16
湖北电力(2016年8期)2016-05-09
航空学报(2015年4期)2015-05-07
纯碱工业(2014年5期)2014-03-11