震后基于无人机快速三维定位被困人员模型研究1
2021-04-14 07:59杜浩国杜浩标张方浩汤筱麒卢永坤曹彦波邓树荣吕佳丽和仕芳
震灾防御技术 2021年2期
杜浩国 孙 志 杜浩标 张方浩 汤筱麒 卢永坤 曹彦波 邓树荣 吕佳丽 和仕芳
1)云南省地震局,昆明 650224
2)中国人民解放军31663 部队,昆明 650224
引言
我国地震活动具有频度高、强度大、震源浅、分布广的特点,加之建筑物抗震性能差、人口密度大,地震常造成巨大经济损失与人员伤亡。有关资料显示,唐山地震发生后0.5 h、1 d、2 d、3 d、4 d、5 d 被埋压人员救活率分别为99.3%、81%、52.6%、36.8%、18.9%、7.4%,时间再久救活率更低。未能快速准确判断废墟中被困人员数量、位置及被埋压深度是错过黄金救援时间的关键因素(许建华等,2016),因此,对震后基于无人机快速三维定位被困人员模型的研究具有重要意义。
国内外众多学者对震后被困人员定位问题进行了研究,目前较先进的定位方法主要为光学定位、红外线定位、雷达定位、声波定位、无线信号定位和遥感卫星影像几何定位。胡宇航等(2018)对光学定位方法进行了研究,通过色彩对比提取降噪后震区人员视觉图像特征,并与震区原始图像特征进行对比,获取震区待搜救人员候选图像,但光学定位方法受光线强度、废墟遮挡、幸存者有效光信号微弱等因素限制,且对救援现场环境的要求较高;孙黎明(2012)对红外线定位方法进行了研究,通过探测器将温度信号转换为可测量的物理信号,再经信号处理系统,由显示器显示出红外热图像,从而帮助救援人员确定遇难者位置,但由于红外线对废墟穿透性较弱,导致定位误差较大,无法进行大范围被困人员定位,需近距离操作,无法保证搜救人员安全;孙公德等(2017)对雷达定位方法进行了研究,提出了应用分布式超宽带雷达探测地震被困人员的技术,主要研究了分布式超宽带雷达协同探测网络的构建、超宽带雷达生命迹象探测算法、分布式雷达节点探测数据融合方法,为多雷达干扰抑制、分布式雷达节点自定位、微弱生命迹象稳健探测、废墟穿透定位误差补偿等关键技术难题提供了设计方案,但由于被埋压人员无法移动,严重影响了雷达探测效果,且雷达探测设备部件多、质量大、不便携带;曹辉等(2007)对声波定位方法进行了研究,通过对被困人员发出的各种求救信号进行分析,确定适合现场搜救的有效信号,并提出适用于地震救助现场,基于振动直达波到达时差的4 点时差定位搜索理论方法,但由于被埋压人员无法时刻发出信号,严重影响了声波探测效果,进行快速大范围探测难度较大;Wu 等(2013)对无线信号定位方法进行了研究,利用已有WiFi 基础设施和手机射频信号研究移动人员运动状态,通过终端设备自动读取RSSI 样本和传感器数据,从而省去了传统定位方法所需的现场采集参考点数据过程,但受WiFi 信号范围限制,要求救援人员在废墟上作业,难以保证救援人员安全;潘雪琛等(2019)对遥感卫星影像几何定位方法进行了研究,基于遥感卫星影像,利用高精度影像数据和高程数据获取物方平面和高程坐标后,将其视为精度较低的控制点参与区域网平差,从而实现在不额外增加实测控制条件的情况下提高定位精度。
基于上述方法局限性,本文采用无人机进行搜索定位(杜浩国等,2018),在很大程度上保证了救援人员生命安全,不仅能进行大范围搜索,还能提高搜索效率,三维定位模型对被困人员埋压深度进行精确定位,对提高震后被困人员存活率具有重要意义。
1 研究方法
1.1 技术路线
本方法技术路线为:采用无人机对搜索区域进行全覆盖搜索,利用无线信号RSSI 模型测量无人机与被困人员之间的距离;根据所测距离对被困人员进行三维圆周定位;采用质心定位模型确定被困人员精确三维坐标信息;采用无人机遥感技术获取搜索区域高程与正射影像图,得到基于ArcGIS 的地形+房屋三维矢量图(李永强等,2006;杜浩国等,2021);通过实例验证模型精确性和高效性。震后基于无人机快速三维定位被困人员模型流程图如图1 所示。

图1 震后基于无人机快速三维定位被困人员模型流程图Fig. 1 The flow chart of the model of the trapped people based on the uav fast 3D positioning after the earthquake
1.2 无线信号测距模型
本文主要根据接收WiFi 信号的强度进行被困人员测距(徐秀杰等,2018),RSSI 测距技术利用无线电信号随距离增大而有规律衰减的原理测量节点间的距离,根据读取节点射频芯片寄存器的值,可得到发射节点(如手机)发射信号强度,接收点(终端)根据接收信号强度,计算信号传输损耗,利用理论或经验模型将信号传输损耗值转换为距离值。根据谢益溪(2008)的研究得到无线信号传播衰减模型如下:

其中:Pr(d)表示收发节点距离为d时的接收信号强度(dBm);Pr(d0)表示无线收发节点距离d0=1 m 时,接收点接收到的无线信号强度RSSI 值,一般取值为32.44;d0表示收发节点参考距离,通常取为1 m;n表示由环境决定的路径损耗指数,一般为2~4,理想自由空间下取为2,非理想自由空间下>2;XdBm表示均值为μ、方差为δ的高斯分布随机数,其标准差为4~10。
根据谢益溪(2008)的研究,无线信号在自由空间中的路径损耗模型如下:

其中:A为无线收发节点相距1 m 时接收点接收到的无线信号强度RSSI 值;A和n均为经验值,与使用的硬件节点、无线信号传播环境密切相关,理想状态下RSSI 与距离的对应关系如图2 所示。
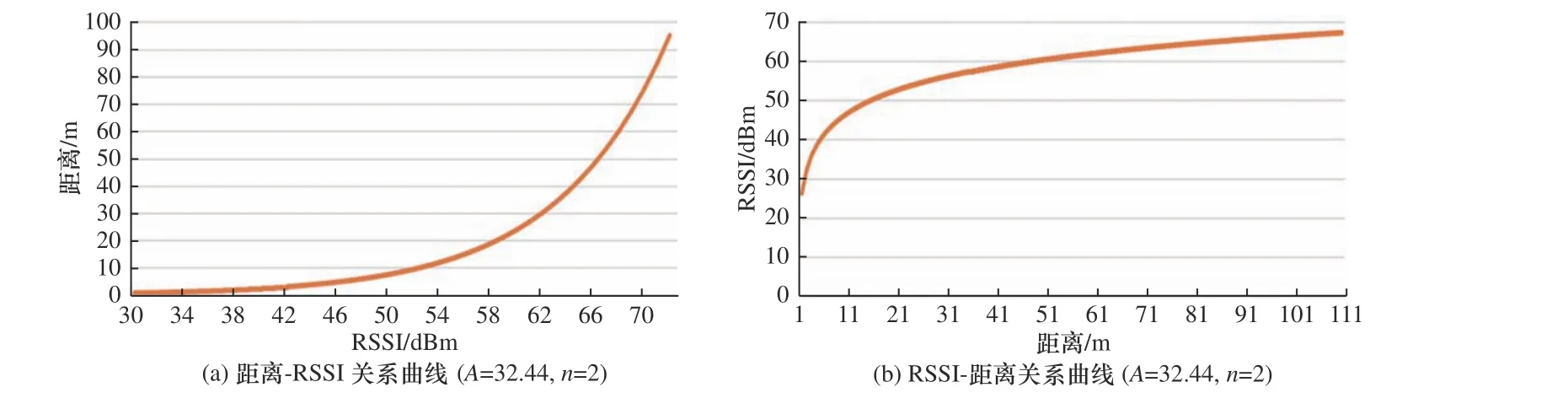
图2 理想状态下RSSI 与距离对应关系Fig. 2 The correspondence between RSSI and distance value under ideal state
1.3 基于DSM 建模
数字表面模型(DSM)指包含地表建筑物、桥梁和树木等高度的地面高程模型,本文从无人机遥感影像DSM 中提取建筑物高程信息,通过ArcGIS 转换为海拔数据,并进行实时房屋+地形三维建模。
1.4 无人机三维圆周定位
三维圆周定位模型是指在三维空间中以无人机(无线信号发射源)为圆心,以与信号接收点(手机)距离为半径做球体,根据无人机飞行姿态变化,得到不同圆心与半径的球体,其中不同球体相交区域即为无线信号接收点在三维空间下的精确位置。图3 所示为无人机三维圆周定位模型理想状态下对掩埋被困人员的定位,a、b、c三点为无人机在三维空间中的搜寻途径点,d1、d2、d3为无人机与被困人员的直线距离可由式(5)计算得到,交点M为无线信号接收点在三维空间下的精确位置。

图3 理想状态下无人机三维圆周定位模型Fig. 3 The ideal positioning 3D model of UAV circumferential
1.5 质心定位
质心定位模型主要解决三维圆周定位中3 个球体不相交于一点的情况,使用模型定位被困人员(手机)时,通常将多边形质心定位模型简化为快捷的三角质心定位模型,以提高计算效率。通过计算三维空间中3 个球体两两相交的切面圆圆心p1(x1,y1,z1)、p2(x2,y2,z2)、p3(x3,y3,z3),可得到被困人员(手机)三维定位坐标M(x,y,z),如图4 所示,进而得到多质心定位模型:

图4 质心定位模型Fig. 4 The positioning model of center of mass

其中:n为定位切面圆圆心数量。
1.6 精度分析

其中,P表示模型定位精度误差率。
2 数据来源与处理
2.1 研究区概况
由于红河县城人口密度高,房屋建筑结构类型复杂且抗震性能差,因此本文选取红河县城区作为研究区(李金香等,2018)。红河县位于云南省南部,红河上游南岸,隶属红河哈尼族彝族自治州,是云南省地质灾害高易发区。境内河谷狭窄,地势中部高、南北低,山地面积大,是云南典型的高原山地县城之一。
2.2 构建基础模型
本文利用无人机自带的GPS 定位及图像实时传输功能,实时建立房屋+地形三维空间矢量图,图5(a)所示为无人机红河县城高清影像,面积约4.2 km2。图5(b)所示为基于地理信息空间技术的房屋框架矢量图,该图以红河县无人机航拍高清影像图为基础,采用地理信息空间技术对城区房屋进行精确矢量化(杜浩国等,2019)。图5(c)所示为红河县城区三维地形矢量图,由无人机高清影像计算得到,可与房屋矢量图进行高精度配准。图5(d)所示为震后基于无人机快速三维定位被困人员基础模型,基于图5(a)、5(b)、5(c)计算得到,该模型不仅提高了定位精度,还增强了可视化程度。

图5 基础模型Fig. 5 The fundamental model (a)、The vector diagram of house frame based on geographic information space technology (b)、The 3D vector topography of Honghe county (c)、The model of fast location of trapped people after earthquake (d)
2.3 参数设置
由于红河县城区面积较大,本研究采用固定翼无人机进行搜索作业(邓飞等,2017),其中飞行面积约4.2 km2(不考虑无线信号覆盖范围),搜索路径约54.4 km。由于城区内建筑物最高海拔989 m,最低海拔813 m,为避免无人机执行任务时与建筑物发生碰撞,将无人机飞行海拔设定为最高1 100 m,最低900 m,无人机搜寻路径如图6 所示。根据实地调查统计与高分辨率遥感影像建筑物分级提取得到城区内钢筋混凝土房屋共475 栋,占房屋总数的6.431%,其余类型房屋共6 895 栋,占房屋总数的93.569%,因此参数n和A均以50 栋钢筋混凝土房屋以外或钢筋结构较少房屋的实测均值为准,即n=3,A=40,得到RSSI 与距离、距离与RSSI 对应关系,RSSI 均取绝对值,如图7 所示。

图6 无人机搜寻路径Fig. 6 The search path of UAV

图7 本研究RSSI 与距离对应关系Fig. 7 The correspondence between RSSI and distance value in this study
2.4 模型硬件配置
采用无人机进行快速搜索,利用其在一定搜索区域内可快速获取被困人员信息网络的特点,计算得到搜索区域手机数量、信号强度和MAC 地址等信息。根据RSSI 测距、圆周定位与质心定位,实现搜索区域手机快速三维定位,并在信息终端(计算机)以三维图形的方式进行显示。模型主要分为搜索系统和显示系统,其中搜索系统主要由无人机、无线路由中继器、WiFi 模块、机载电源等设备组成,显示系统主要包括以ArcGIS 为基础的房屋+地形三维信息。
被困人员定位思路为:无人机信号搜索系统通过自带的wifi 热点中继设备获取手机信号强度RSSI,并通过无人机遥控终端设备进行信息传输,将数据传送到用于信息控制与处理的计算机,同时通过无人机获取研究区遥感信息,进行实时三维建模,对被困人员位置进行三维图形化显示。
3 结果分析
为验证基于无人机快速三维定位被困人员模型的准确性和可行性,在红河县城区不同区域布设30 台智能手机,每台手机经过设置后可在无人机飞过的短时间内进行快速连接并进行高效的信息传输,表1 所示为模型搜索结果,共有26 台手机被定位,剩余4 台手机无定位消息,可显示被定位手机三维坐标(经度、纬度、海拔)、连接起始时间、无线信号接收强度、信号质量、信息传输速度。此次无人机飞行搜索时间共2 h 5 min,共2 个飞行架次,搜索面积约5 km2(考虑无线信号覆盖范围)。图8 所示为三维定位可视化模型结果,模型中将O(102.401 443,23.376 687,830)设为坐标原点,经度设为x轴,纬度设为y轴,海拔设为z轴,从图8 中可直观清晰地看出26 台手机的三维定位位置。

图8 三维定位可视化模型结果Fig. 8 The model results of 3D localization visualization

表1 模型结果Table 1 The results of model algorithm
表2 所示为模型定位被困人员位置与实际位置对比结果,其中平均误差率为4.97%,漏检率为13.3%,最大误差为11.59%,最小误差为0.000 71%。这是由于手机信号强度在建筑物中受不稳定因素的干扰,波动较大,且人工测量实际坐标时也会产生误差,但误差范围较小,证明本文提出的定位模型可在有障碍阻挡环境下实现手机定位。与传统的人工搜索和架设固定仪器探测相比,本文采用的无人机定位技术可与被困人员手机保持最近距离探测,即无人机在搜索过程中会在一定时间内与被困人员手机保持最近距离信息传输,在搜索效率与精度方面具有优势。

表2 模型定位被困人员位置与实际位置对比结果Table 2 Comparison results of position of trapped people located by model and real position
4 结论
针对震后被倒塌建筑物或滑坡埋压的被困人员进行快速定位问题,本文提出了震后基于无人机快速三维定位被困人员模型,与以往人工定位方法相比,本研究提出的模型优势主要体现在无须组织大量人工进行被困人员搜索,保证了搜索人员人身安全,提高了搜索效率与精确度。利用无人机遥感影像提取技术与三维定位技术,构建了地形+房屋三维定位模型,具有三维直观的可视化效果。但本次模型研究仅利用了遥感影像高程差及短距离无线信号传输,后期研究将结合多遥感数据、无线信号增强模型及无人机超低空飞行技术,实现数据优势互补,避免无人机快速飞行搜索时发生遗漏被困人员的情况。
猜你喜欢
无线互联科技(2021年4期)2021-04-21
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
小学生导刊(2018年34期)2018-12-18
知识经济·中国直销(2018年3期)2018-04-12
电子制作(2016年15期)2017-01-15
山东青年(2016年3期)2016-02-28
学习月刊(2015年1期)2015-07-11