
基于对流云/层状云划分的云分析方法改进
2021-04-14 06:58陈锋董美莹冀春晓
大气科学 2021年2期
陈锋 董美莹 冀春晓
浙江省气象科学研究所,杭州310008
1 引言
模式中湿物理过程对降水预报有着至关重要的作用。而在模式背景场中,云水物质往往与实况差异较大,尤其是传统的“冷启动”方式生成的初始场,一般仅包含温度场、湿度场、气压场和水平风场,而云水物质等非绝热参数则需要通过模式积分逐步调整生成(Donner,1988;王瑾和刘黎平,2009)。这种模式“起转(spin-up)”问题会导致初期模式降水明显滞后于实况出现,造成较大偏差。
近年来,利用卫星及多普勒雷达资料开展复杂云分析应用,为解决模式spin-up问题提供了很好的途径。复杂云分析是以模式预报或初始分析场为背景场,基于物理定理和经验关系建立观测资料与背景场中各要素之间的关系,更新构建更符合实际的网格尺度初始云水物理场,以缓解数值模式云水物质的spin-up问题,从而改进模式预报结果的一种方法(Albers et al.,1996;Zhang et al.,1998)。比如,Lin et al.(1993)利用LAPS(Local Analysis and Prediction System)系统开展资料融合及云分析,改进了初始场信息并明显改善了短时(0~6 h)降水的预报结果。Zhang et al.(1998)和Zhang(1999)借鉴LAPS云分析系统,发展了ADASARPS[(Advanced Regional Prediction System) Data Assimilation System]系统(其中的云分析模块又被称为ARPS对流云方案),并通过分析吸收雷达反射率因子,改进了模式初始场中的云过程、水凝物及其混合比。Xue et al.(2003)利用ADAS系统证明了雷达资料的引入能有效缩短模式的spin-up时间。Hu et al.(2006)改进了ADAS云分析系统,并利用雷达反射率资料反演了初始场中的云水物质,并调整了云内温度和湿度,有效改进了模式对龙卷风暴单体的模拟。Weygandt et al.(2006)提出了直接基于云内格点物理量进行云水、云冰含量估计的云分析方案,并在RUC(Rapid Update Cycle)系统(Benjamin et al.,2004,2007;Alexander et al.,2010)中得到应用(被称为RUC层云方案)。近年来应用广泛的GSI(Gridpoint Statistical Interpolation,Hu et al.,2015)系统则包含了ARPS对流云方案和RUC层云方案,但因缺乏对流判据,无法同时使用。
在国内,也有较多学者利用LAPS、ADAS、RUC等云分析方案开展研究(盛春岩等,2006;屈右铭等,2010;胡金磊和郭学良,2013;程兴宏等,2014;王洪等,2015;薛谌彬等,2017)。业务上,以北京和上海气象局为代表的业务单位研制了各类快速更新循环同化数值预报系统(陈敏等,2011;雷蕾等,2012;陈葆德等,2013;邱金晶等,2015),这类系统针对强对流短时临近预报而设计,但在模式spin-up过程中或多或少都存在一定问题。朱立娟(2012)利用GRAPES(Global/Regional Assimilation and Prediction System)短时临近预报模式系统开展检验时发现,该系统中的ADAS云分析模块计算的水凝物含量比卫星观测值偏高。李佳等(2017)也在上海的业务系统应用过程中发现了类似的问题,并分析这种初始水凝物偏高与模式物理方案的不协调,是引起积分初始阶段模式调整剧烈和降水量偏大的根本原因。造成水凝物分析结果偏高的主要原因与ARPS对流云方案的设计有关,该方案是针对于深对流系统设计的,在非对流格点上使用该方案分析会导致分析所得的水凝物含量偏高。因此,李佳等(2017)根据地表感热和潜热通量确定对流尺度速度作为对流判据,在ADAS中增加了层云方案,对不同类型的格点分别采用对流云方案和层云方案计算云水、云冰,显著减轻了模式初始阶段的云水、云冰过量问题,提高了降水的预报能力。然而,该方法提出的对流判据的准确性依赖于模式对感热和潜热通量模拟的准确性。
目前,较为常用的对流云—层状云划分一般考虑地面降水强度(Churchill and Houze, 1984;Caniaux et al.,1994)、上升速度(Tao and Simpson,1989;Tao et al.,1993,2000;Xu,1995;Houze, 1997)、相对湿度(Tao et al.,1993;Chin,1994;Alexander and Cotton,1998)、雷达反射率(Steiner et al.,1995)等因素,其中地面降水强度和雷达反射率相对易于观测和获取。Lang et al.(2003)对比了六种不同划分方案后指出,不同方案间的定性划分结果是一致的。因此本文拟采用地面降水强度和雷达反射率作为判别因子,构建一种基于观测数据的对流云—层状云划分方法,并将其应用于GSI云分析系统中。针对2019年梅雨期间的一次混合云降水过程,分别采用纯层云方案(ST 方案),纯对流云方案(CU 方案),基于地表感热、潜热通量确定对流尺度速度作为对流判据的混合方案(CSW 方案),以及本文新提出的基于地面降水强度和雷达反射率划分对流云/层状云作为判据的混合方案(CUST方案),进行循环同化对比试验。通过对流格点分布、云水云冰物质变化和降水的分析,探讨新方案对云分析结果和降水预报的影响。本文的内容安排如下:第2节介绍了云分析方法的改进及个例,第3节概述了观测数据和数值试验设计方案。改进后的云分析方法的验证及其对模拟结果的影响在第4节进行了分析。第5节是结论与讨论。
2 云分析方法改进和个例选取
2.1 GSI 云分析系统
云分析是使用观测资料和模式的初始分析场,通过物理定律和经验关系,构造出网格尺度的初始云水物理场,以缓解数值模式云水物质的spin-up问题,使模式积分的早期结果更接近于实况(Albers et al.,1996;Zhang et al.,1998)。其基本思路是:首先利用观测计算云覆盖区域,在区域内计算云凝结物(云冰和云水)含量;再利用反射率因子计算水物质(雨、雪和雹)含量;进而调节温度和水汽场。目前,GSI中同时包含了两个较为成熟的方案:ARPS对流云方案和RUC层云方案。对于云凝结物(云冰和云水)含量的计算,ARPS对流云方案的计算在云内,即将云从云底到云顶细分为多层,逐层通过计算温度、气压和饱和水汽压求得饱和水汽混合比,然后计算相邻两层饱和水汽混合比之差作为基本的云水和云冰的增量或减量,最后依据环境温度分离云冰和云水含量;而RUC层云方案的计算在模式层上,先分别计算格点液面和冰面的饱和水汽混合比,再根据温度确定权重求取格点上云滴粒子混合比的加权平均,最后按温度权重系数分离出云水和云冰。对于水物质(雨、雪和雹)含量的计算,ARPS对流云方案和RUC层云方案均是在先确定降水类型后,再根据不同的微物理方案[如KRY 方案(Kessler,1969)或Lin 方案(Ferrier,1994)或Thompson 方案(Thompson et al., 2004)]计算云内雨、雪和雹粒子的含量。对于云内的温度调节,ARPS对流云方案采用湿绝热过程,将云从云底到云顶细分为多层,利用Smith-Feddes方案(Albers et al.,1996)计算得到的每层云内温度计算位温,进而计算与模式背景位温差并根据垂直速度进行适当调整;而RUC层云方案采用干绝热过程,在模式层上直接计算位温并进行调整。对于水汽调节,ARPS对流云方案同时根据格点雷达反射率观测和云量调整;而RUC层云方案则根据云量进行调整。总的来说,ARPS对流云方案与RUC层云方案的最大区别在于:RUC 层云方案的计算不考虑云的垂直结构即垂直方向的联系,而直接以模式层格点的物理量来估计云凝结物含量和调整云内温度;ARPS对流云方案的设计主要用于深对流系统,而RUC方案更适用于层状云降水系统。
2.2 基于对流云/层状云划分的云分析方案改进
GSI 云分析系统在结合背景场和观测资料完成三维云场的构造后(即确定云底、云高与网格云量),首先进行云滴粒子质量浓度的估计。由于缺乏对流判据,原始系统在计算云水、云冰含量时,只能选择ARPS对流云方案或RUC层云方案中的一种,这显然与实际情况有较大差异。李佳等(2017)根据地表感热和潜热通量确定对流尺度速度(convective-scale velocity)作为对流判据,来划分对流云和层状云(简称为CSW 方案),但由于感热和潜热均来自于模式模拟,划分结果存在模式依赖性,与实况存在一定差距。因此,本文对云分析方案的改进,主要在于引入一个基于可靠实况的对流云/层状云判别因子,认为在同一云分析格点中同时存在一定概率的对流云/层状云,通过判别因子可计算出每个网格点中属于对流云/层状云的概率(以下简称占比概率),对不同性质的对流云或层状云分别采用ARPS对流云方案或RUC层云方案来分析,最终按占比概率加权得到云水、云冰的混合比。区别于CSW 方案中以绝对阈值划分对流云和层状云,新方案由于采用概率来描述每个格点中对流云和层状云的占比,因此所求得的云水、云冰的混合比在空间上的变化相对CSW 方案较为平缓一些。新方案中,对流云/层状云的占比概率计算较为关键,这里选择易于观测和获取的地面降水强度和雷达反射率作为判别因子,采用模糊逻辑法来实现对对流云和层状云的识别(简称为CUST方案)。具体步骤如下:(1)候选识别参数的获取。为便于业务运行,这里选取国家气象信息中心研制的中国多源降水融合系统2.1版本(CMPAS,CMA multisource precipitation analysis system,AS-Hourly V2.1)中的三源融合降水(潘旸等,2015,2018)和中国气象局气象探测中心研制的雷达反射率拼图数据作为判别因子。CMPAS降水数据融合了CMORPH(CPC MORPHing technique)卫星降水估测资料、雷达QPE降水资料和地面站点降水资料,实时提供1 h、5 km 分辨率的降水产品。雷达反射率拼图数据是在对单部雷达基数据做了定标、质量控制后,将全国天气雷达组网拼图的资料进行网格化、重叠区域处理,最终生成全国10 min、1 km 分辨率的反射率拼图产品。(2)候选识别参数统计特征的获取。由于不同的降水过程和不同的降水发展阶段,对流云和层状云对应的候选参数值(CMPAS降水值和雷达反射率值)的大小会有变化。理想的统计特征应该来自大量样本,这里选取2019年5~7月的数据进行统计:首先选取统计时间段内的小时强对流样本(观测站点小时雨强大于20 mm h-1),共有11493个站次;其次从CMPAS和雷达反射率格点数据中提取出对应的降水值和反射率值;分别制作这些CMPAS降水和雷达反射率样本的分布概率密度函数和累计概率密度函数(如图1所示);最后选取90%和50%的累积概率对应的候选参数值作为对流发生的上下阈值。从图1分析可以看到,CMPAS降水的上下阈值分别为8 mm h-1和16 mm h-1,雷达反射率的上下阈值为26 dB Z 和38 dB Z。Churchill and Houze(1984)指出,划分对流云和层状云的降水阈值可随不同情况从10 mm h-1到25 mm h-1不等;Steiner et al.(1995)也认为雷达反射率超过40 dB Z 的点都应该是对流性降水。与已有研究相比,本研究得到的候选参数阈值应该是恰当的。(3)识别方法。由于候选参数存在相互交叉部分,选取一组固定参数阈值不能适用于各种情况下的层状云和对流云识别,因此,这里选用模糊逻辑法(Fuzzy Logic Method;曹俊武等,2005;肖艳姣和刘黎平,2007)来实现。模糊逻辑法不追求云类型的具体的识别参数量值,而是将识别参数分为各种等级,根据宽松的分级原则,求得较为合适的结果,具有较强的扩充性和兼容性。这里采用基本形式为函数T 的隶属函数系对这两个识别参数进行模糊化。利用由2.2节中获取的候选参数上下阈值,可最终获得对流云的模糊基函数(图2),根据这两个模糊基函数可知:某个格点中,CMPAS降水小于8 mm h-1(雷达反射率小于26 dB Z)时,该处属于对流云的概率为0(即全部为层状云);CMPAS降水大于16 mm h-1(雷达反射率大于38 dB Z)时,该处属于对流云的概率为100%(即全部为对流云);处于两者之间时,该处属于对流云概率的线性变化。具体的表达式如下:
2.3 个例选取
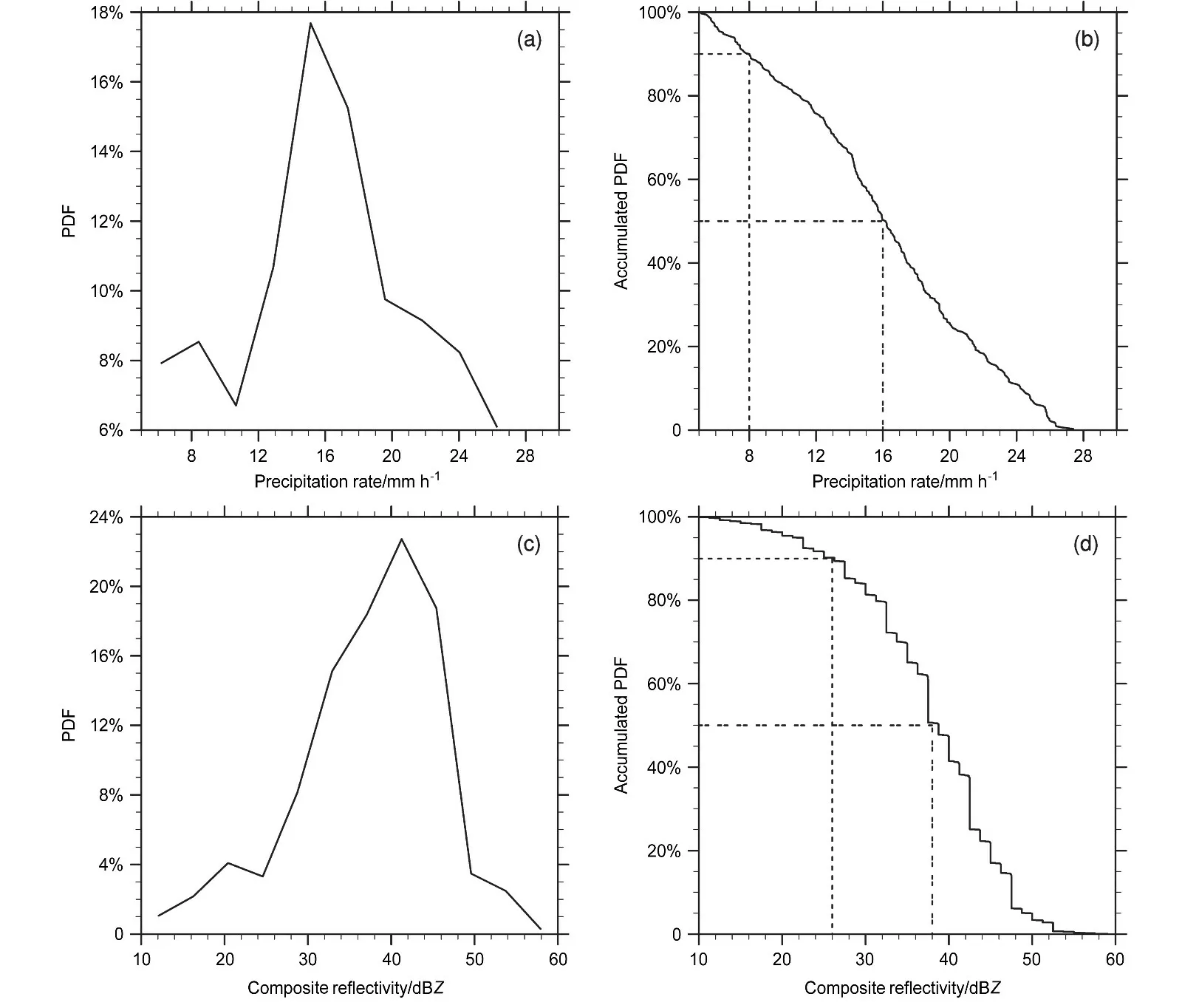
图1 2019年5~7月基于对流云/层状云划分得到的(a)CMPAS降水量、(c)雷达反射率的概率密度,(b)CMPAS降水量、(d)雷达反射率的累积概率密度Fig.1 Probability density function(PDF)of(a)CMPAS(China Meteorological Administration multisource precipitation analysis system)precipitation and(c) radar reflectivity,and accumulated PDF of (b)CMPAS precipitation and(d)radar reflectivity obtained from the separation of the convective and cloud stratiform cloud from May to July 2019
选取2019年6月19日的一次梅雨过程作为试验个例。6月17~21日受低空切变线影响,浙江省出现连续强降雨天气,强降雨较为稳定,主要集中在浙中北地区,部分有暴雨局部大暴雨。浙江省快速更新同化业务系统(邱金晶等,2015)提前6 h 预报出了此次降水过程,对东西向雨带的分布有较好的预报能力,6 h 的累计降水在30~60 mm,略小于实况,但临近预报的降水量偏大,特别在起报后0~1 h 浙西北及绍兴宁波地区,有空报强降水落区(图略),这与朱立娟(2012)和李佳等(2017)指出的问题是一致的。
3 数值试验方案设计
3.1 试验配置
试验以浙江省快速更新同化业务系统(Zhejiang WRF-ADAS Rapid Refresh System,ZJWARRS;邱金晶等,2015)的系统框架为基础,选用WRF-ARW V3.7.1(http://www2.mmm.ucar.edu/wrf/users[2020-05-07];Skamarock et al.,2008)作为预报模式,GSI-3DVAR V3.4(Hu et al.,2015)作为资料同化系统,研究区域以(32°N,117°E)为中心,两层嵌套网格,分辨率分别为9 km 和3 km,网格数分别为265×265 和205×187,网格参数与业务版本相同(图3)。微物理方案采用Thompson方案(Thompson et al.,2008),辐射传输方案采用RRTMG 方案(Iacono et al.,2008),表层方案采用修正的Monin-Obukhov 方案(Jiménez et al.,2012),边界层方案采用YSU 方案(Hong et al.,2006),陆面方案采用Noah 方案(Chen and Dudhia,2001),不采用积云参数化方案。试验从2019年6月19日08时(北京时,下同)冷启动,初始背景场资料由GFS(Global Forecast System)模式每3 h 间隔的0.5°×0.5°实时预报资料(www.nco.ncep.noaa.gov/pmb/products/gfs[2020-05-07])通过WPS(WRF Preprocess System)初始化模块插值获取,其他时刻同化的背景场则由本系统上一时次的1 h 预报场提供,侧边界全部由GFS资料提供,具体流程如图4所示。
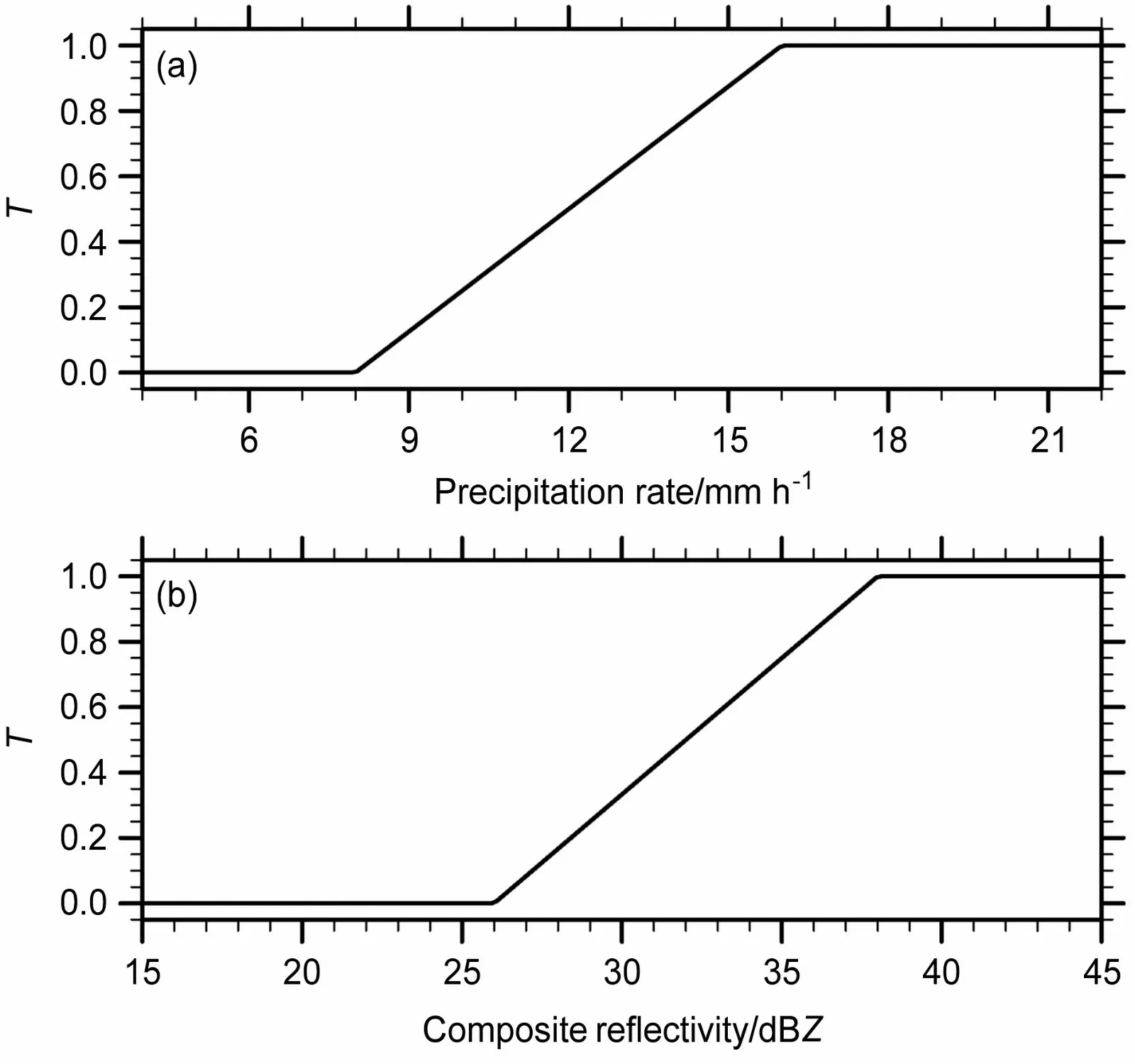
图2 基于函数T 的识别参数(a)CMPAS降水量、(b)雷达反射率的模糊基函数Fig.2 Fuzzy setting based on function T for the separation parameters:(a)CMPASprecipitation;(b)radar reflectivity
3.2 观测资料
本研究用于同化的观测资料包括常规资料、多普勒雷达资料和风云卫星二级产品数据。常规资料主要来自于NCEP提供的Global Data Assimilation System(GDAS,www.emc.ncep.noaa.gov/gmb/gdas[2020-05-07])观测数据,包括地面天气站点报(SYNOP)、机场地面报(METAR)、船舶和浮标观测(SHIP+BUOY)、全球GTS探空观测数据(Rawinsonde)、飞机报文观测(AMDAR)、卫星云导风(SATWND)等常规观测资料。雷达基数据资料主要来自于浙江省气象信息网络中心提供的浙江省内的8部多普勒SA/SB波段雷达的观测数据,包括衢州、丽水、金华、杭州、湖州、宁波、台州、舟山,其观测要素为雷达反射率因子和径向速度。风云卫星数据来自于国家卫星气象中心风云卫星遥感数据服务网,包括风云4A 卫星的云检测、云顶高度、云顶气压和云顶温度资料。另外,浙江省及其周边区域约4000多个地面自动站的小时降水将用于验证模拟效果,其站点平均空间分辨率为6~7 km。已有研究表明,在较高空间密度情况下,不同插值方法对结果影响有限(Ikeda et al.,2010;许娈等,2017)。因此,在定量评估降水时,本研究采用简单易行的反距离权重方法将站点数据插值到模式格点上。

图3 浙江快速更新同化系统的模拟区域,彩色阴影表示地形高度(单位:m)Fig.3 Simulation area of Zhejiang WRF-ADAS(Weather and Forecast Research, ARPS(Advanced Regional Prediction System)Data Assimilation System) rapid refresh system,shadingsrepresent terrain height (units:m)
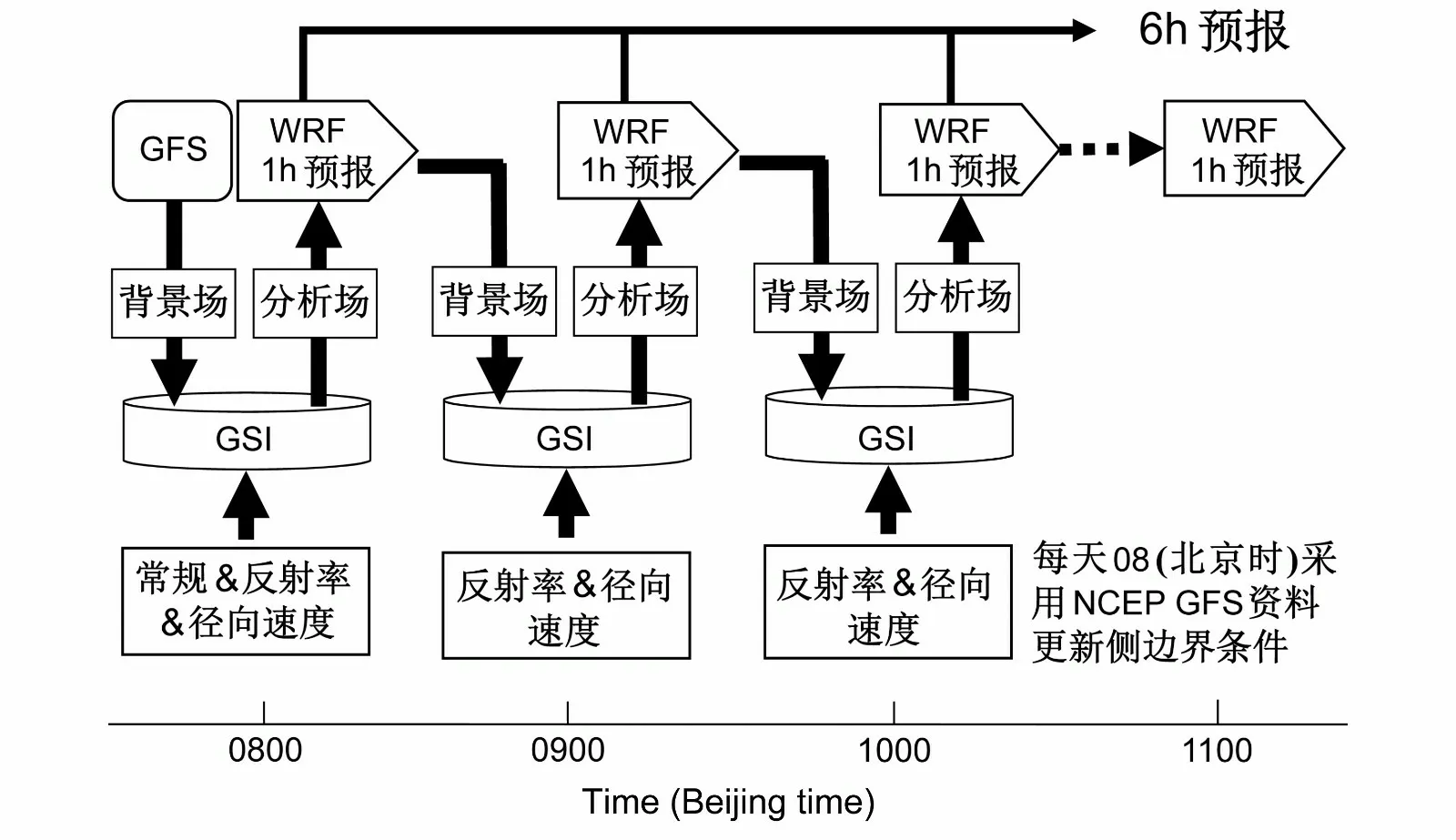
图4 循环同化流程示意图Fig.4 Flowchart of thecycling assimilation system
3.3 试验设计
为探讨新改进的混合云分析方案对本次过程预报的影响,本研究设计了4个数值试验,分2组分析(表1)。(1)层云方案试验(ST):WPS从GFS资料插值处理得到2019年6月19日08时的插值场作为初始背景场,并在08时由GSI-3DVAR(threedimensional variational data assimilation)同化GDAS常规资料和雷达径向速度,采用RUC层云方案进行云分析,然后以得到的分析场作为初始场,向前积分预报6 h 至14时。此后的循环,均以前1 h的预报场作为背景场,由GSI-3DVAR 同化雷达径向速度并采用RUC层云方案进行云分析,然后以得到的分析场作为初始场,向前积分预报6 h。(2)对流云方案试验(CU):同ST 试验,但采用的是ARPS 对流云方案做云分析。(3)新改进的混合云分析方案试验(CUST):同ST试验,但采用的是基于CMPAS降水和雷达反射率的模糊逻辑法的混合云分析方案做云分析。(4)基于对流尺度速度的云分析方案试验(CSW):同ST 试验,但采用的是基于地面感热和潜热通量的对流尺度垂直速度法的混合云分析方案做云分析。

表1 数值试验配置方案Table1 Configuration schemesof experiments
将ST、CU 和CUST试验作为第一组试验,用于对比改进后的混合云分析方案与纯层云方案和纯对流云方案的差异及其对模拟结果的影响。将CSW 与CUST 试验作为第二组试验,用于比较不同对流云/层状云划分方案对云分析结果及模拟结果的影响。
4 模拟结果分析
为探讨不同云分析方案对模拟结果的影响,本文主要从云分析结果的差异、不同云分析方案对降水模拟结果的影响这两个方面开展对比分析。
4.1 对流云/层状云划分方法检验
在改进的云分析方案中,对流云和层状云的划分起到了至关重要的作用。图5给出了2019年6月19日09时,分别根据CMPAS降水、雷达反射率和同时考虑两者的模糊逻辑法划分得到的对流云占比概率的分布。表2给出了三种划分方法与实况对流云(实况小时降水大于20 mm h-1的站点)分布的定量统计结果,可以看到采用模糊逻辑方法的准确率最高(0.95),仅根据CMPAS降水划分的方法次之(0.94),仅根据雷达反射率划分的方法最低(0.92)。模糊逻辑方法有效较低了仅根据雷达反射率划分时带来的空报现象(空报率从0.52下降到0.09),同时也降低了仅根据CMPAS降水划分时带来的漏报现象(漏报率从0.73下降到0.56),与实况更为一致。虽然三种划分方法均识别出了浙中北地区东西向的强对流区域,但是仅依据CMPAS降水划分的对流云分布明显偏小,而仅依据雷达反射率划分的对流云分布明显偏大,依据模糊逻辑法划分的对流云,既包含了主要强对流区域,也覆盖了强对流周边区域,对流云面积大小较为恰当。
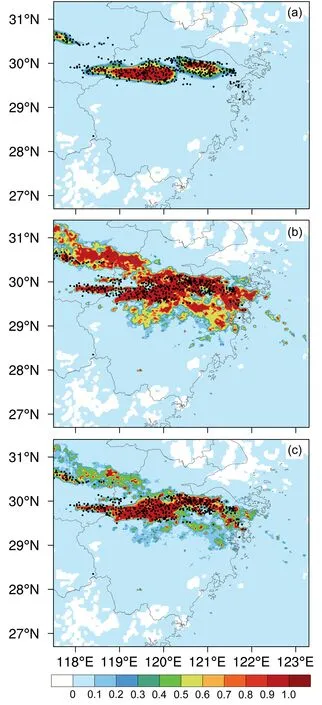
图5 2019年6月19日09时根据(a)CMPAS降水方法、(b)雷达反射率方法、(c)模糊逻辑方法划分的对流云占比分布。黑点表示观测降水量大于20 mm h-1的站点Fig.5 Proportions of convective cloud according to(a)CMPAS precipitation method,(b)radar reflectivity method,(c)fuzzy logical method at 0900 BJT(Beijing time)19 June 2019.Black points denote theobservation stationswith precipitation exceeding 20 mm h-1

表2 对流云/层状云划分方法检验统计Table 2 Test statistics of the division method for c onvective cloud and stratiform cloud
4.2 对云水、云冰分析的影响
不同方案对分析结果的影响表现在对云水、云冰含量的反演。图6给出了2019年6 月19 日09时ST 试验、CU 试验及CUST试验分析得到的云水、云冰垂直累积量的水平分布。可以看到,三个试验分析得到的云水、云冰物质主要呈东西向分布在浙中北部及安徽东南部,这与雷达反射率和强对流区域的分布是一致的(图5b)。但三个试验分析得到的云水、云冰含量大小有较大差距,其中,ST 试验的分析结果最小,在整个区域内均处于0.2~2 kg m-2;CU 试验的分析结果最大,在整个降水区域内都存在不低于4 kg m-2的云水、云冰总量;而CUST试验的分析结果介于ST 试验和CU试验之间,在判定为对流云的区域,保留了CU 试验对流特征,云水、云冰总量在4~14 kg m-2,而在判定为层状云的区域,保留了ST 试验的层云特征,云水、云冰总量在0.2~4 kg m-2。

图6 不同云分析试验方法分析得到的2019年6月19日09时的云冰、云水含量垂直累积量的水平分布(单位:kg m-2):(a)ST试验;(b)CU 试验;(c)CUST 试验Fig.6 Horizontal distributions(units:kg m-2)of vertically integrated cloud ice content and cloud water content from different cloud analysis experiments at 0900 BJT 19 June 2019:(a)Experiment ST(stratiform cloud analysis);(b)experiment CU(convective cloud analysis);(c)experiment CUST (improved hybrid cloud analysis)

图7 2019年6月19日09时不同云分析试验方法分析得到的格点平均云水(q c)质量混合比和云冰(q i)质量混合比的垂直分布(单位:g kg-1)Fig.7 Vertical distributions(units:g kg-1)of grid-averaged cloud ice(q i)mass mixing ratio and cloud water(q c)mass mixing ratio obtained from different cloud analysismethods at 0900 BJT 19 June2019
图7进一步给出了2019年6月19日09时ST 试验、CU 试验及CUST 试验分析得到的区域格点平均云水、云冰混合比的垂直分布。可以看到,三个试验分析得到的云水均分布在11 km 以下,云冰均分布在6 km 以上,在6~11 km 是云水、云冰共存的区域,但从量值上来看有较大差异。ST试验分析的云水、云冰含量最低,云水含量约为CU试验的1/4,云冰含量约为CU 试验的1/10;而CUST 试验分析的云水、云冰含量居于ST试验和CU 试验之间。从峰值来看,ST 试验云水、云冰含量的峰值分别出现在5 km 和8 km 处,CU 试验的峰值出现位置略高于ST试验,分别出现在6.5 km和11 km 处,而CUST 试验居于两者之间。另外,无论是从云水、云冰的水平分布(图6),还是从垂直分布(图7)上,都可以明显看到ST试验分析得到的云水物质分布连成一片,阶梯变化较小,而CU 试验则相对梯度更大。这是由于RUC层云方案计算始终在模式层上,加上在计算云物质总量的事后附加了上限,云分析得到的云水物质场梯度不明显;而ARPS对流云方案将云从云底到云顶细分为多层,计算每层云水物质场的分布后再插值到模式层,因此分析得到的云水物质量值较大且梯度相对明显。CUST 试验依据对流判别因子,融合了RUC层云方案和ARPS对流云方案,在强对流区分析的云水、云冰含量高,保留了对流特性,而在非对流区云水、云冰含量低,保留了层云特性。新方案使分析得到的云水、云冰含量的空间分布相对更为合理。
4.3 对降水的影响
初始云水物质场的变化,将直接影响短时降水的模拟。由图8可见,三个试验模拟的2019年6月19日09时起报的1 h 累计降水分布形态相似,均呈东西向分布,但在量级上ST 试验降水最小,CU 试验最大,CUST 试验居于两者之间。从降水差异图上可以看到,CUST 试验比ST试验在浙江中北部强对流区域模拟了更多的降水(图8e),而比CU 试验在非强对流区域模拟了较少的降水(图8f)。这表明,新方案能在保留ARPS对流云方案在强对流区域的强降水模拟的同时,较大程度改进了该方案在非对流区域的偏湿、降水偏大的不足。

图8 2019年6月19日10时的1 h 累计降水量(单位:mm):(a)ST 试验;(b)CU 试验;(c)CUST 试验;(d)观测;(e)CUST试验与ST 试验的差异;(f)CUST 试验与CU 试验的差异Fig.8 1-h accumulated precipitations(units:mm)at 1000 BJT 19 June 2019:(a)Experiment ST run;(b)experiment CU run;(c)experiment CUST run;(d)observation;(e)experiment CUST run minus experiment ST run;(f)experiment CUST run minus experiment CU run
对起报后3 h 内逐10 min 累计降水进行的定量评估显示,新方案对模拟结果的改进明显(图9)。ST、CU 和CUST试验模拟降水的小雨量级(≥0.1 mm)的平均ETS评分分别为0.315、0.294和0.318;大雨量级(≥3.0 mm)的平均ETS评分分别为0.018、0.022和0.027。这是由于ST试验中RUC层云方案分析的对流区域云水、云冰偏小,导致ST试验对大雨量级预报ETS评分较低;CU试验中ARPS对流云方案分析的非对流区域云水、云冰物质过多,导致CU 试验对小雨量级预报ETS评分较低;而CUST 试验结合两者优势,所以对小雨量级降水预报的ETS评分明显高于CU试验,而对大雨量级降水预报的ETS评分明显高于ST试验,取得了综合评分最好的结果。需要指出的是,云分析对降水的影响主要集中在模式起报的初始时期(6 h 甚至3 h 内),新方案对模式结果的改进也主要出现在模式起报初始阶段。这和王洪等(2015)、李佳等(2017)的结论是一致的。
4.4 循环同化结果分析
图10a 给出了2019年6月19 日08~14 时的逐小时循环试验中每次分析得到的对流格点(对流云概率大于50%的格点)占区域总格点数的比例变化。可以看到,CUST 试验分析得到对流格点的比例在10%~20%不等,这与此次过程中梅雨锋上对流活动强弱有关。图10b显示,ST 试验分析得到的云水含量最小,在0.1~0.4 kg m-2之间略有变化;CU 试验分析得到的云水含量最大,在0.9~1.7 kg m-2间变化,几乎比ST试验大一个量级;而CUST 试验分析的云水含量在ST 和CU 试验之间,且与对流格点的比例变化趋势相一致。三个试验分析得到的云冰含量情况与云水类似(图10c)。
对起报后6 h 的逐小时累计降水开展定量评估显示,新方法对模拟结果有一定程度的优势(图11)。在小雨量级,CUST 试验的ETS得分明显高于CU试验,而空报率(False Alarm,FAR)明显低于CU 试验。这说明原有ARPS 对流云方案会使模式对小雨量级的降水有较大程度的空报,而CUST试验增加引入层云方案,可有效降低小雨空报率。而在大雨量级,CUST 试验的ETS评分和FAR 评分虽然也优于ST 试验和CU 试验,但其优势并不十分明显。这说明新方案对小雨量级的改进程度相比大雨量级要更为明显。此外,也有一种可能是本次个例的对流区域范围较小,导致新方案比层云方案的优势未能充分体现。

图9 2019年6月19日09~12时ST 试验、CU 试验、CUST 试验模拟的逐10 min 累计降水量(a)≥0.1 mm、(b)≥3.0 mm 的ETS评分Fig.9 ETS(Equitable threat score)for 10-min accumulated precipitation(a)≥0.1 mm,(b)≥3.0 mm from experiments ST,CU,and CUST simulationsfrom 0900 BJT to 1200 BJT 19 June2019

图10 2019年6月19日08~14时的逐小时循环试验中(a)CUST 方案分析得到的对流云格点数目占总格点数目的比例,ST、CU、CUST 三种方案分析的(b)云水质量混合比、(c)云冰质量混合比垂直累积的模式内层区域平均Fig.10(a)Percentage of convective cloud grids in total cloud grids obtained from the experiment CUST,vertically integrated(b)cloud water(q c) mass mixing ratio,(c)cloud ice(q i)mass mixing ratio obtained from hourly cycling experiments ST,CU,and CUST averaged in theinner model domain from 0800 BJT to 1400 BJT 19 June2019
4.5 新方案与CSW 方法的比较


图13b、c给出了CSW 试验和CUST 试验分析得到的云水、云冰含量分布。可以看到,虽然两个试验分析的云水、云冰都集中在浙中北雨区,但与对流格点分布的相关性较大。CSW 试验分析的云水、云冰含量主要分布于安徽东南部及浙江宁波地区,而CUST 试验分析的云水、云冰主要分布于杭州绍兴宁波地区的东西向区域。对比实时雷达回波(图13a),CUST 试验分析的云水、云冰含量的空间分布更具有可靠性。
沿雷达回波最强区域(直线AB)及其近似垂向区域(直线CD)分别取两个剖面作进一步分析。由于CSW 试验对直线AB区域对流区域的漏报,其分析的云水、云冰含量明显偏小(图14b),沿剖面的分布情况也与实况回波分布(图14a)相差较大,而CUST 试验分析的云水、云冰含量较大且分布更为合理(图14c)。对于直线CD区域,CSW方法存在对CD区域对流的误判,导致其分析的云水、云冰含量明显偏大,而CUST分析的相对更为合理(图14d-f)。
图15给出了CSW 试验及CUST 试验模拟的2019年6月19日10时1 h 累计降水及其差异。对比实况观测可以看到,CSW 试验在安徽东南部、天目山区、及宁波地区存在明显的降水高估现象,而在杭州地区的强降水中心附近存在明显的低估。CUST 试验对于上述降水高估和低估的区域,均存在一定程度的改善(图15d),这与云水、云冰含量的改进区域是一致的,说明CUST试验对降水的修正主要是由云分析方案对云水、云冰含量分析的改进造成的。
对模式起报后前3 h 的逐10 min 降水定量评估(图16)可以看到,CUST 试验对小雨以上(≥0.1 mm)量级降水的ETS评分比CSW 试验有一定程度的提高,而FAR 评分则有一定程度的下降。这说明由于新方案基于实况融合降水和雷达反射率划分的对流云—层状云比CSW 基于模式前1 h 预报的感热潜热计算得到的划分更为合理,分析得到的云水、云冰含量量级和分布也更接近实况,因此其模拟的降水评分也更高。这进一步证明了新方案的合理性。
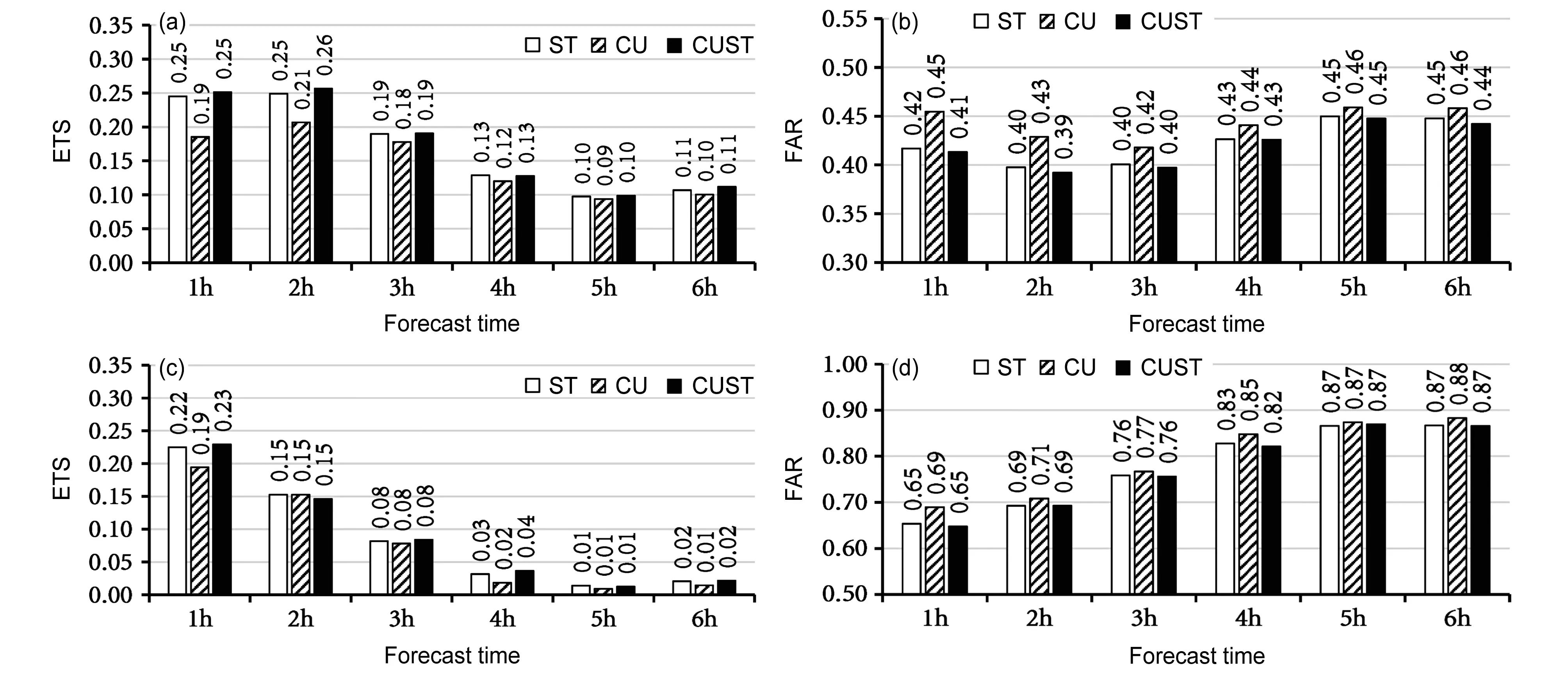
图11 2019年6月19日08~14 时逐小时循环试验中ST、CU、CUST 方案模拟的1 h 累计降水量(P)平均的(a)ETS评分(P≥0.1 mm)、(b)空报率(P≥0.1 mm)、(c)ETS评分(P≥3.0 mm)、(d)FAR 空报率(P≥3.0 mm)Fig.11 Averaged (a) ETS(1-h accumulated precipitation P≥0.1 mm), (b) FAR (false alarm, P≥0.1 mm),(c) ETS(P≥3.0 mm), (d) false alarm (P≥3.0 mm)obtained from hourly cycling experiments ST,CU,and CUST from 0800 BJT to 1400 BJT 19 June 2019

图12 2019年6月19日09时(a)上一次循环模式预报的潜热(单位:W m-2),(b)上一次循环模式预报的感热(单位:W m-2),采用(c)CSW 方案、(d)CUST 方案分析得到的对流云所占比例分布。图c、d 中的黑点表示观测降水量大于20 mm h-1的站点Fig.12(a)Latent heat fluxes(units:W m-2)from the last cycle,(b)sensibleheat fluxes(units: W m-2)from the last cycle, proportions of convective cloud obtained from(c)the experiment CSW(Convective-scale velocity)and(d) the experiment CUST at 0900 BJT 19 June 2019.In Figs.c and d,black pointsdenote observation stationswith precipitation exceeding 20 mm h-1

图13 2019年6月19日09时(a)雷达反射率(单位:dB Z),(b)基于CSW 方案、(c)基于CUST 方案分析得到的云水、云冰含量垂直累积的水平分布(单位:kg m-2)。直线AB、CD分别表示雷达回波最强区域(直线AB)及其近似垂向区域(直线CD)Fig.13(a)Radar reflectivity(units:dB Z),horizontal distributions(units:kg m-2)of vertically integrated cloud ice and cloud water obtained from (b)theexperiment CSW,(c)theexperiment CUST at 0900 BJT 19 June 2019.Lines AB and CD represent thestrongest radar echo region (line AB)and its approximatevertical region (line CD), respectively
5 结论与讨论
本文选取了实况融合降水和雷达反射率因子作为划分对流云和层状云的判别因子,分析了两个判别因子的阈值范围,并采用模糊逻辑法提出了一个新的对流云/层状云判别方法,基于该划分方法改进了GSI 同化系统中的云分析方案。通过多组数值试验的对比,分析改进前后的云分析方案对2019年6月19日浙江一次梅雨降水过程模拟的影响,探讨了新方案的合理性和对模式预报的改进效果。主要结论如下:(1)基于实况融合降水(CMPAS)和雷达组合反射率,采用模糊逻辑法提出的对流云/层状云判别方法,可较为准确地划分对流云和层状云,以此作为判别因子改进GSI同化系统中的云分析方案切实可行。(2)个例试验表明,单纯的对流云分析方案会明显高估非对流区域的云水、云冰含量,导致模式积分前期降水量偏大;而单纯的层云分析方案恰好相反,会明显低估对流区域的云水、云冰含量,导致强降水区雨量偏小。引入对流云/层状云判别因子后,新的云分析方案综合了对流云分析方案和层云分析方案,在对流区域采用对流云分析方案,在非对流区域采用层云分析方案,减小了单纯对流云方案在非对流区域的空报现象、以及单纯层云方案在强对流区域的漏报现象,有效改进了降水的模拟。(3)改进后的云分析方案,对模式预报初期(6 h 甚至3 h 内)的改善效果较为明显,且对小雨量级的降水改进幅度要优于大雨量级。(4)与CSW 方法相比,改进后的云分析方案基于实况资料划分的对流云/层状云更为合理,模拟的降水结果更优,说明该方法有较好的应用潜力。

图14 2019年6月19日09时沿图13 中直线AB(左)和直线CD(右)的垂直剖面:(a、d)观测的雷达反射率因子(填色,单位:dB Z);(b、e)CSW 方案、(c、f)CUST方案分析的反射率因子(填色,单位:dB Z)、云水含量(蓝色等值线,单位:g kg-1)、云冰含量(黑色等值线,单位:g kg-1)Fig.14 Vertical cross section along the line AB (left)and line CD(right)in Fig.13 at 0900 BJT 19 June 2019:(a,d)Observed radar reflectivity(shadings, units:dB Z); radar reflectivity(shadings, units:dB Z),cloud water content(blue contours,units:g kg-1),and cloud ice content(black contours,units:g kg-1)obtained from (b,e)theexperiment CSW,(c,f)theexperiment CUST

图15 2019年6月19日10 时1 h 累计降水量(单位:mm):(a)CSW 试验;(b)CUST 试验;(c)观测;(d)CUST 试验与CSW试验的差异Fig.15 1-hourly accumulated precipitations(units:mm)at 1000 BJT 19 June 2019:(a)Experiment CSW run;(b)experiment CUST run;(c)observation;(d)experiment CUST run minus experiment CSW run

图16 2019年6月19日09~12时CSW 试验和CUST 试验模拟的逐10 min 累计降水量(≥0.1 mm)的ETS评分和FAR 评分Fig.16 Scores of ETSand FAR(false alarm)for the 10-min accumulated precipitation(≥0.1 mm)of experiment CSW run and experiment CUST run from 0900 BJT to 1200 BJT 19 June2019
综上所述,基于对流云/层状云划分的混合云分析方法的改进能有效提高模式对降水的模拟性能。但需要指出的是,与CSW 方法相比,CUST方案需要更多的观测(或再分析)资料,业务应用时需要统筹配合;CUST 方案中的识别参数阈值也会受到样本数目、天气过程和区域差异的影响,可能需要进一步通过细分季节和区域、增加样本数量等方法提高对参数阈值的适用性。此外,CUST方案对小雨量级改进较大而对大雨量级改进不明显,这一结论可能会受到个例选取的影响,对于有些受水汽条件影响更大的个例模拟,CUST 方法对大雨量级的降水的改进也许也会较大,这有待今后更多研究的开展和验证。
猜你喜欢
印制电路信息(2022年11期)2022-11-30
海洋通报(2022年4期)2022-10-10
金山(2022年8期)2022-09-06
光谱学与光谱分析(2022年4期)2022-04-06
宝藏(2021年1期)2021-03-10
东坡赤壁诗词(2020年3期)2020-07-04
幸福家庭(2019年14期)2019-01-06
儿童故事画报·自然探秘(2018年7期)2018-11-01
东坡赤壁诗词(2018年2期)2018-05-10
宝藏(2017年4期)2017-05-17
