
无人机滑跑侧翻现象建模与控制设计
2021-04-16 13:07孟祥瑞
导航定位与授时 2021年2期
张 迪,孟祥瑞,谢 勇
(中国航天科工集团第三研究院无人机技术研究所, 北京 100074)
0 引言
近年来,各类无人机在军事和民用领域都得到了广泛应用。固定翼无人机具有多种起降方式,其中滑跑起降方式仅借助跑道即可完成起降任务,具有对外界系统依赖小的优势。针对此类无人机,滑跑安全性是整个飞行任务的基础,也是其重复使用的重要前提[1-2]。
无人机处于滑跑阶段时,其安全性会受滑跑速度、航向角速度、质量、重心位置、起落架轮距、地面材质、风向等诸多因素的影响。特别是在人工辅助操纵飞行中,操纵手仅仅通过视觉观察难以实现细微的航向偏差调节,容易出现操纵过量导致的侧翻和甩尾等危险。
目前,无人机滑跑方面的研究多为基于飞机地面滑跑的基本受力进行理论建模和仿真[3-4]。本文以前三点式无人机为研究对象,重点针对滑跑中的侧翻问题进行建模分析,提出了防止侧翻的安全性约束,通过系统辨识建立前轮转弯滑跑控制模型,最终通过试验验证了加入安全性约束的无人机滑跑控制的有效性。
1 无人机侧翻现象建模研究
无人机在滑跑速度较快时,由于航向操纵不当会引起无人机瞬间产生较大的离心力,导致一侧主轮迅速离地,造成无人机失稳发生侧翻。本节针对侧翻问题进行具体建模,并分析其临界条件。
1.1 侧翻建模
模型建立中,为简化问题分析,假定:
1)无人机作为刚体,其质量不变;
2)地面是惯性参考系,即地面坐标为惯性坐标;
3)机体坐标系的x-o-z平面为无人机对称平面,无人机的几何外形和内部质量均关于x-o-z平面对称;
4)飞机滑跑过程中无外界风的干扰。
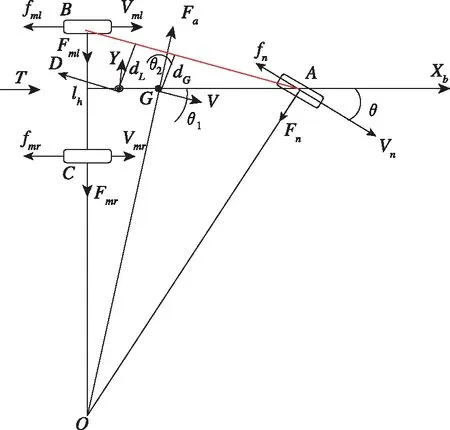
图1 无人机地面力学关系示意图Fig.1 The force diagram of the UAV on ground
无人机在地面滑跑时,前轮为主控轮,控制无人机的滑跑方向。滑跑系统几何和力学关系如图1所示,当航向失稳时,飞机会沿前轮和后侧轮连线(图1中AB连线为侧翻轴)发生侧翻。初步分析,侧翻的原因是离心力等力相对侧翻轴产生的侧翻力矩大于重力等力相对侧翻轴产生的稳定力矩。由此,具体分析各力相对侧翻轴产生的力矩并进行侧翻建模。
飞机在滑跑转弯时所受惯性力:离心力;所受外力:重力、发动机推力、气动力和支持力、侧向力、摩擦力等地面作用力。将以上各力分别对侧翻轴求取力矩[5-6]。
1)离心力矩:由圆周运动产生的离心力为Fa=-mVr,对侧翻轴取矩为Fa·lGcosθ2。其中,V为滑跑速度;r为航向角速度;lG为重心高度;θ2为离心力与重心到侧翻轴垂线的夹角。
2)重力矩:重力对侧翻轴取矩为mg·dG。其中,dG为重心到侧翻轴的垂直距离。
4)气动力矩:无人机滑跑阶段所受气动力包括升力、侧向力和阻力,对应的力矩为ML、MY和MD。
5)地面作用力:地面对无人机轮胎的作用力包括支持力、侧向力(Fn,Fml,Fmr)和摩擦力(fn,fml,fmr),但是在发生侧翻时,地面作用力与侧翻轴在同一平面内,不产生力矩。
1.2 侧翻临界条件分析
发生侧翻的临界条件为一侧后轮支持力为零,此时沿侧翻轴的所有力矩应恰好平衡。由此侧翻临界条件得到力矩平衡方程为
其中,离心力矩主要与飞机的运动状态有关,即正比于滑跑速度和航向角速度。一般情况下,飞机发生侧翻主要是因为过大的离心力矩导致,因此随着滑跑速度的加快,航向操纵的精确性必须得到保证。
2 侧翻临界条件的试验验证
2.1 试验方案
2.1.1 试验描述
为了减少试验中的变量,保证更精确的试验结果,将试验无人机拆下机翼,排除气动力参数对本试验的影响。飞控系统控制无人机前轮,操纵手控制无人机油门,分别进行以下两组试验[7-8]。
1)由飞控系统给定无人机前轮某固定转角,使无人机沿固定半径做圆周运动,操纵手逐渐加大油门,使无人机圆周运动的速度逐渐变快,当速度超过某一值时,无人机发生侧翻。
2)由飞控系统向无人机前轮持续输出左右激励信号,使无人机做蛇形运动,操纵手逐渐加大油门,随无人机速度的逐渐增加,前轮左右偏转,最终导致无人机发生侧翻。
2.1.2 试验对象
表1所示为前三点式双尾撑无人机(不带机翼)的相关参数。表2 所示为翼身融合(Blended Wing Body, BWB)无人机(不带机翼)的相关参数。

表1 双尾撑无人机(不带机翼)

表2 BWB无人机(不带机翼)
2.1.3 试验记录
无人机滑跑侧翻前,滚转角变化幅度微小;而发生侧翻时,滚转角会大幅度变大。当滚转角大于2°时,可以判定为无人机发生侧翻,将滚转角等于2°的时刻记为侧翻临界点。无人机从滑跑到侧翻过程中的参数变化如图2所示[9]。
将侧翻临界点的数据记录汇总如表3。
将试验数据计算处理汇总如表4。
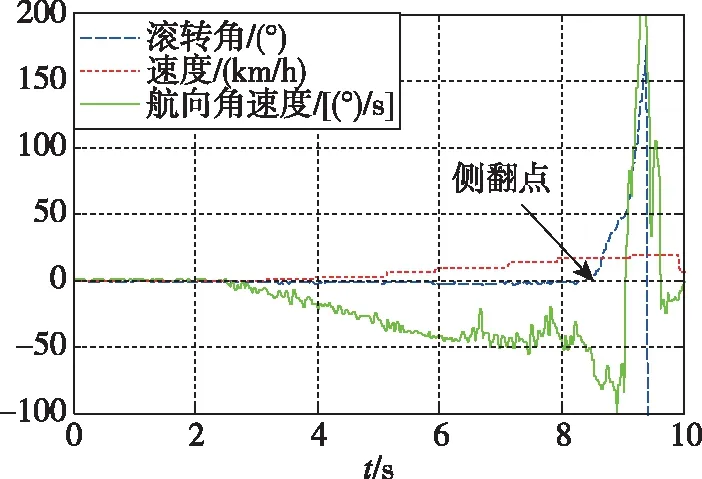
(a)前轮转角为8°的圆周运动
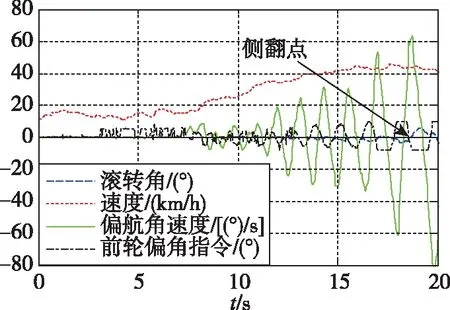
(b)蛇形运动图2 试验样例Fig.2 A test sample
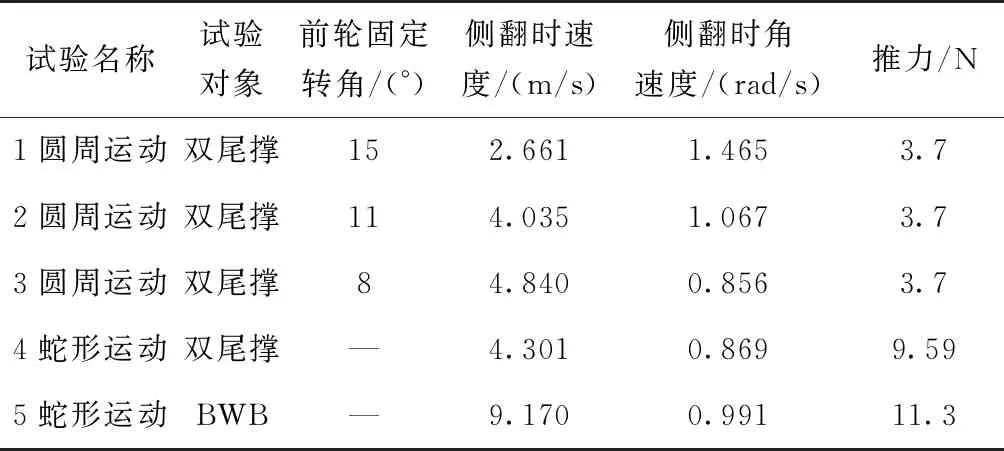
试验名称试验对象前轮固定转角/(°)侧翻时速度/(m/s)侧翻时角速度/(rad/s)推力/N1圆周运动双尾撑152.6611.4653.72圆周运动双尾撑114.0351.0673.73圆周运动双尾撑84.8400.8563.74蛇形运动双尾撑—4.3010.8699.595蛇形运动BWB—9.1700.99111.3
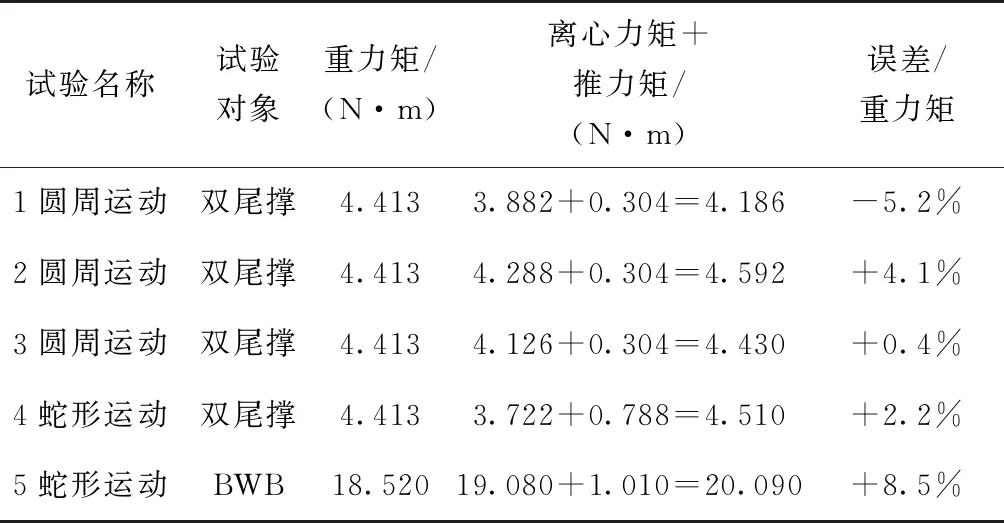
表4 侧翻临界点数据处理
2.1.4 试验结论
由上文分析的侧翻临界条件可预测无人机在侧翻临界点时的侧翻力矩应等于稳定力矩。从侧翻临界点的试验数据可以看出,离心力矩与推力矩之和大致等于重力矩,误差在10%以内,能够基本验证沿侧翻轴的各力矩符合力矩平衡方程,从而验证了无人机侧翻模型。即离心力矩与推力矩之和等于重力矩时,无人机处于侧翻临界状态。
2.2 防侧翻安全性约束
经过侧翻模型的试验验证可知,当无人机的侧翻力矩大于稳定力矩时,无人机就会发生侧翻,因此可以得到防止侧翻的安全边界为
mVrcosθ2·lG≤mg·dG-MT-MA
式中,MT和MA分别为推力矩和气动力矩,无人机所容许的Vr越大,说明无人机的防侧翻能力越强。因此在设计阶段,在满足其他要求的条件下,可以通过改变飞机质量和重心高度等因素,尽量增大Vr的最大值,从而提高飞机滑跑的防侧翻能力。
在设计无人机高速滑跑控制律中,要充分考虑防止侧翻的安全边界,即无人机所容许的Vr的最大值,且在飞机前轮接收指令端设计侧翻保护系统,如图3所示[10-11]。
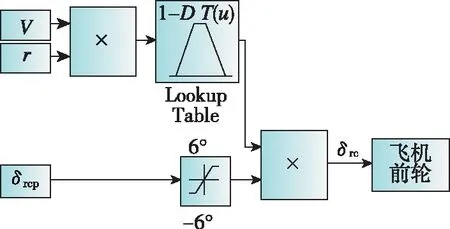
(a)防侧翻控制原理
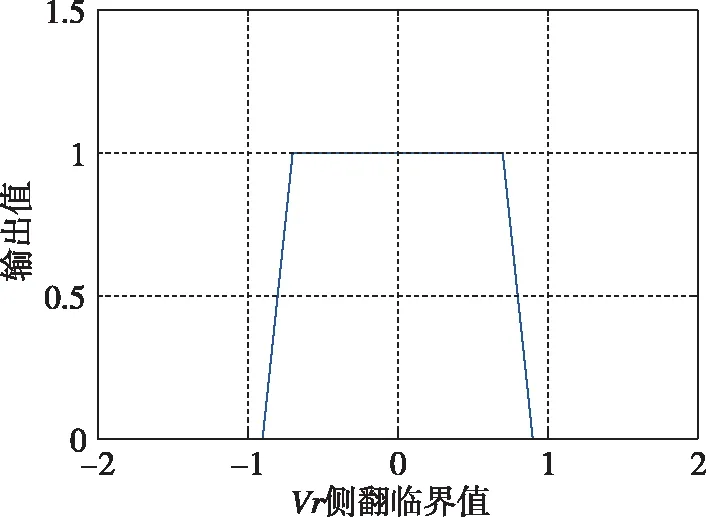
(b)Lookup Table输出值随Vr的变化图3 侧翻保护系统Fig.3 Side tumbling protection system
图3(a)中,δrcp是向前轮发出的偏转指令;δrc是前轮实际接收的偏转指令。δrcp与δrc的关系是由Lookup Table的输出值决定的,Lookup Table的输出值随Vr的变化如图3(b)所示。在无人机滑跑过程中,当Vr值小于侧翻临界值的80%时,Lookup Table的输出值恒为1,δrcp与δrc相等;当Vr值大于侧翻临界值的90%时,处于濒临侧翻的危险状态,Lookup Table的输出值为0,前轮接收的指令变为0,前轮强制回中以避免侧翻的发生,极大减轻了航向操纵的负担。
3 前轮转弯模型辨识
根据理论分析和多次试飞经验可知,高速滑跑无人机的航向操控非常困难,原因在于滑跑速度较大时,航向操控必须达到极其细微精确的程度;而人的判断能力和操控水平很难达到这种程度,稍微不当的操控就会导致滑跑航向失控,进而引发侧翻或冲出跑道等灾难性后果。因此,需要加入飞控系统进行滑跑控制,确保无人机在长距离高速滑跑过程中能够维持精确稳定的航向。
在设计滑跑航向控制系统之前,首先应获得无人机的前轮转弯模型。由于无人机轮胎的各种具体参数未知,且与地面作用力复杂,因此可以将其简化为一阶惯性环节,通过时域辨识的方法得到前轮转角对航向角速度的传递函数。
无人机匀速直线滑跑时,由飞控系统控制前轮,并向前轮发出某阶跃信号指令;无人机前轮接到指令后,执行相应角度的前轮转角,使无人机由直线运动状态进入转弯状态。记录这一动态过程中的前轮指令和航向角速度,通过辨识得到航向角速度r对前轮转角δrc的传递函数为
将辨识得到的结果与实际航向角速度进行对比,趋势基本吻合(见图4),说明经过辨识得到的前轮转角对航向角速度的传递函数是比较准确的,能够反映系统的特性[12]。

图4 辨识结果与实际航向角速度对比Fig.4 Comparison between the identification result and actual yaw angle velocity
4 带侧翻安全约束的滑跑航向控制
4.1 滑跑航向控制设计
滑跑航向控制律用于控制并保持无人机滑跑航向角,能够通过控制前轮的偏转使无人机的滑跑航向与初始给定的航向指令保持一致。在滑跑航向控制律中,航向控制回路为外回路,目的是保证精确的滑跑方向;航向角速度控制回路为内回路,目的是增加滑跑的航向稳定性。侧翻保护系统的应用,进一步增加了高速滑跑的安全性[13-15]。
滑跑航向控制律的执行机构是飞机前轮,如遇突发意外情况,操纵手可以主动干预滑跑航向控制律。操纵手的操控方式由传统的直接操控前轮转角变为航向指令模式,即方向杆量经过增益叠加到初始航向指令上形成实际航向指令。滑跑航向控制律通过跟踪实际航向指令完成航向的操控,有效避免了直接操控模式对前轮的过激操控,大大降低了侧翻和航向失控的风险。由此需求设计了无人机的滑跑航向控制律,如图5所示。
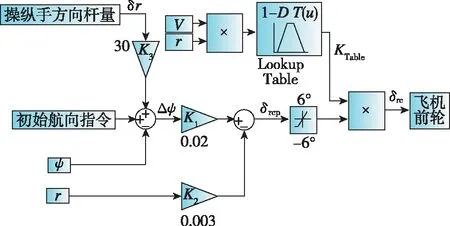
图5 滑跑航向控制系统Fig.5 Taxiing course control system
1)控制律输出的指令δrc=(Δψ·K1-r·K2)·KTable。
2)航向角控制阶跃响应如图6所示,根据无超调、上升时间1s左右的设计目标,增益调参取K1=0.02,K2=0.003,K3=30,限幅器范围:-6°~6°。
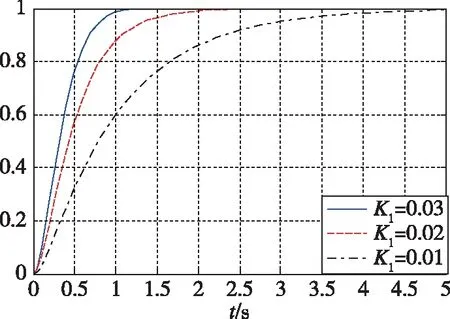
图6 航向角控制阶跃响应Fig.6 Step response of the course angle control
3)滑跑航向控制律可控制的前轮偏转角度为±6°,操纵手的方向杆量经过增益K3变为航向指令(操纵手输出的航向指令范围为-15°~15°)并叠加到初始航向指令上,但在正常情况下操纵手杆量输出为0。
4.2 滑跑航向控制试验验证
为了测试滑跑航向控制律的实际控制效果,以前三点式BWB无人机为试验对象,对航向跟踪动态响应和航向保持分别进行试验,记录数据并和仿真结果进行对比如图7(a)和图7(b)所示。从动态过程看,飞机响应与仿真结果一致,验证了辨识模型的准确性;从稳态过程看,飞机能较好地保持在指定状态。
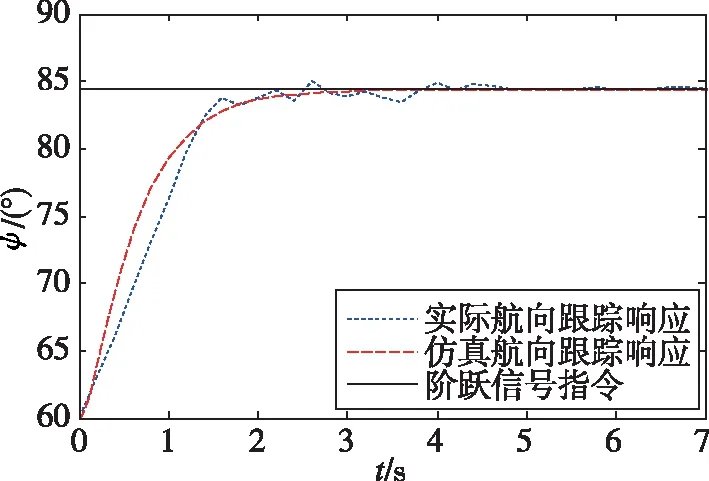
(a)航向控制律的动态响应

(b)航向控制律的航向保持图7 航向控制试验验证Fig.7 Experimental verification of course control
通过试验得知,无人机在高速长距离滑跑时,使用滑跑航向控制律代替操纵手能够大大提高无人机航向稳定性并能保证精确的滑跑航向,避免出现航向突变以及航向不可控的现象,极大减轻了操纵手的压力。
5 结论
1)针对无人机滑跑出现的侧翻问题,本文根据侧翻轴力矩平衡方程建立了滑跑侧翻模型,并以实际试验验证了模型的正确性。该模型能够有效指导无人机起落架总体参数和滑跑侧翻安全边界的设计。
2)在滑跑航向控制律中,操纵手的方向杆量由传统的直接控制前轮变为指令模式,使无人机在滑跑过程中通过跟踪指令而改变航向,有效避免了航向突变等危险运动状态。根据侧翻模型提出的滑跑侧翻安全边界,在前轮接收指令端加入侧翻保护系统,这一方法可以有效地抑制侧翻事故的发生,保证了无人机的安全滑跑。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
当代陕西(2019年17期)2019-10-08
小学生学习指导·爆笑校园(2019年6期)2019-09-10
中学课程辅导·教师通讯(2018年10期)2018-09-04
师道(2018年6期)2018-07-16
中学生数理化·高一版(2017年3期)2017-07-08
红蜻蜓(2015年11期)2016-02-02
