
3-RRR并联机构SolidWorks和MATLAB运动学仿真分析
2021-04-16 13:06罗建国聂高兴王宇强
机械设计与制造工程 2021年3期
罗建国,王 婷,聂高兴,王宇强
(1.华北科技学院机电工程学院,河北 三河 065201) (2.河北省矿山设备安全监测重点实验室,河北 三河 065201) (3.华北科技学院安全工程学院,河北 三河 065201) (4.太原理工大学机械与运载工程学院,山西 太原 030024)
并联机构具有刚度大、结构稳定、动态性能好等优点[1],其中平面三自由度并联机构广泛应用于机械精密加工、军事、医学等领域[2-3],逐渐成为机构学研究领域的热点。许多学者对平面三自由度并联机构进行了研究,并提出了多种不同类型的平面三自由度并联机构,其中3-RRR就是一种灵活度较高、操作性强的平面三自由度并联机构[4]。冯志坚等[5]采用数值法对三自由度并联机构进行位置求解,并结合ADAMS软件仿真分析,得到该机构的动力学速度、加速度曲线。刘伟等[6]采用代数消元法对3-RPS并联机构进行运动学位置求解。刘震[7]基于方位特征集和数值法分析3-UPU并联机构的运动特性、位置求解、工作空间,得到了该机构的运动空间轨迹。宋轶民等[8]通过分析对比3-RRR和4-RRR并联机构的运动学模型,发现3-RRR并联机构的耦合度低,即冗余支链增加了机构耦合度,对奇异位形造成了影响。黄剑锋等[9]基于ADAMS软件建立3-RRR并联机构模型,得到了该机构的位移及速度曲线。许多学者基于数值法和代数消元法对运动学位置进行求解,但求解过程比较复杂。随着科学技术的发展,并联机构被广泛应用于各行各业,因此通过分析并联机构的耦合度,进而采取更加安全、有效、合理的措施,就可以减轻奇异位形造成的损失。本文以3-RRR并联机构为研究对象分析该机构的耦合度,对于并联机构的解耦具有非常重要的意义。
1 机构耦合度分析
本文构建的3-RRR并联机构运动简图如图1所示。该机构由定平台A、动平台C和3条相同的支链RRR构成。设θi为AiBi绕转动副Ai的轴线逆时针旋转至与o-x轴平行的转角;φi为CiBi与通过点Bi的轴线的夹角,旋转方向为逆时针;ai为转动副Ai和转动副Bi轴线之间的距离,a1=a2=a3=a;bi为转动副Bi和转动副Ci轴线之间的距离,b1=b2=b3=b;r为动平台内接圆半径;R为静平台内接圆半径。其中θi,φi的大小由机构的位形决定,ai,bi,r,R由机构本身的结构确定,其中i=1,2,3。
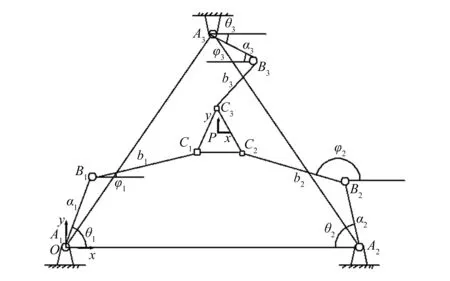
图1 平面3-RRR并联机构
本文基于有序单开链(SOC)进行机构耦合度和运动学位置求解,步骤如下:首先,由于任一机构都是由若干个基本运动链(BKC)组成,因此可将3-RRR拓扑机构基本运动链分解成约束度为正、负、零3种不同的序单开链,并计算其各自的约束度,其中序单开链按照自由度不可再分的是基本运动链。其次,在按机构的基本运动链计算出约束度后,再通过其约束度(Δj)计算耦合度(κ):当SOC约束度的数值为正时,SOC支链自由度增加,由此可增加κ个虚拟变量,进而建立包含虚拟变量的位置方程;当SOC约束度的数值为零时,SOC支链自由度不发生变化,不需设立虚拟变量,即可单独求解位置方程;当SOC约束度的数值为负时,SOC支链自由度减少,位置方程求解比较困难,因此可通过设立虚拟变量建立约束方程。最后,利用数学方法求解位置方程。该方法可将位置求解过程简化成求解各个有序单开链的位置,过程简单,思路清晰。
基于上述理论基础,将该机构的拓扑结构分为2条支链,分别为SOC1{-A1-B1-C1-C2-B2-A2}、SOC2{-A3-B3-C3-},计算其各自的约束度,其数学表达式如式(1)所示:
(1)
式中:Δj为第j个单开链的约束度;mj为第j个单开链的运动副数目;fi为第i个运动副的自由度;Ij为第j个单开链的驱动副数目;ζLj为第j个回路的位移方程数。
将约束度Δ1,Δ2的计算结果代入耦合度κ的公式中,其数学表达式如下:
(2)
式中:ν为并联机构的基本回路数。
耦合度的数值越大,表明该机构位置求解越复杂;反之,耦合度的数值越小,表明该机构位置求解越简单。
2 位置分析
2.1 位置正解分析
3-RRR平面并联机构位置正解可简述为:已知定平台上各个主动副Ai的输入角度θi(如图1所示)、动平台坐标系上P点的坐标以及位姿角γ(如图2所示)。设动平台上点P在固定坐标系的位置为(xP,yP),转动副Bi在定坐标系o-xy中表示如下:
(3)
式中:R为定平台内接圆半径。

图2 动平台位姿图

(4)
式中:x和y分别为C2的横、纵坐标;xC1和yC1分别为点C1的横、纵坐标;xB1和yB1分别为点B1的横、纵坐标。

(5)
式中:xC3和yC3分别为点C3的横、纵坐标。

在约束度Δ2<0的支链中,利用三角形几何关系建立约束方程,如式(6)所示:
f(φ1)*=(xC3-xB3)2+(yC3-yB3)2-b2=0
(6)
式中:f(φ1)*为包含虚拟变量的约束方程;xB3和yB3分别为点B3的横、纵坐标。
则动平台的位姿如式(7)所示:
(7)
式中:xC2和yC2分别为点C2的横、纵坐标。
2.2 位置逆解分析
位置逆解可简述为:已知动平台坐标系上各个转动副的坐标,求定平台上各个主动副的输入角度θi。给定P点的坐标(xP,yP),若并联机构的动平台存在位置逆解,Bi必须存在,利用支链的几何关系可知Bi是以Ai为圆心、ai为半径的圆与以Ci为圆心、bi为半径的圆的交点,可建立如下表达式:
(8)
将各个支链各点的坐标代入式(8),可知该方程是关于θi的方程。
(9)
综上可知,对于本文中的3-RRR并联机构,当给定位姿时,1条支链最多可有2组解,3条支链最多可有8组解,即8种位形。
3 奇异分析
奇异是所有机构都会发生的一种不可回避的现象,对于任何机构,在它的运动过程中总会或多或少地遇到特殊位置,在这些位置机构会出现特殊的现象,或者处于死点不能继续运动,或者失去稳定,甚至自由度也发生改变。当机构处于极限点、死点时,这些现象就被称为机构的奇异性。本文主要将奇异位形分为3类,如下所述:
第一类奇异位形是一条支链的主动杆和从动杆平行时,导致机构自由度发生变化,进而影响该机构的运动精度,如图3和图4所示。
第二类奇异位形分为2种情况:一种是2条支链的从动杆互相平行时,导致机构自由度发生变化;另一种是3条支链的从动杆互相平行时,产生奇异。如图5和图6所示。

图3 单支链完全伸展奇异位形 图4 单支链完全折叠奇异位形

图5 2个从动杆互相平行奇异位形 图6 3个从动杆互相平行奇异位形
第三类奇异位形为上述两种奇异类型同时出现。由于此时机构的耦合性比较强,且杆件之间的摩擦比较大,故同时出现这两种奇异位形对机构本身的损害比较大,因此在机构的设计过程中必须避免这3类奇异位形的出现。
4 仿真分析
仿真时设定3-RRR平面并联机构各个杆件尺寸为:a=300 mm,b=100 mm,R=500 mm,r=75 mm。假定该机构用于机械加工行业生产线上的物品搬运。建立如图1所示的坐标系,则动平台P点的运动轨迹可假设成以(275,330)为圆心、以75 mm为半径的圆;动平台上的转动副C2绕C1旋转,即位姿转角为20°,那么动平台中心点P的轨迹运动方程如式(10)所示:

(10)
式中:t为运动时间。
基于MATLAB软件对3-RRR并联机构进行运动学仿真,通过运算可以得到该机构的角速度、角加速度等运动曲线,如图7和图8所示,该曲线可以精确表达该机构的运动特征。

图7 角速度曲线图
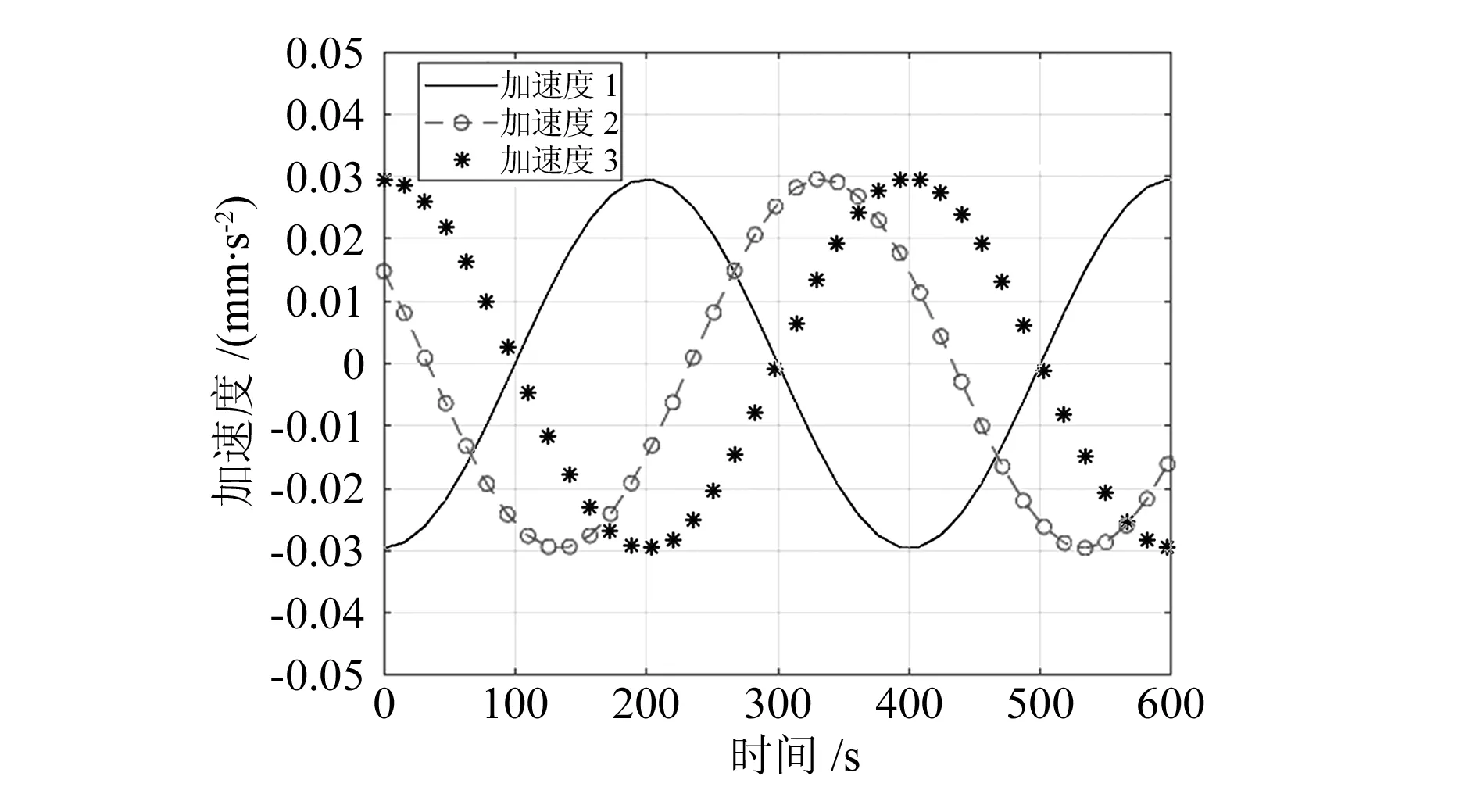
图8 角加速度曲线图
5 结束语
本文以3-RRR并联机构为研究对象,利用有序单开链法获得该机构的耦合度κ=1,即该机构属于低耦合度的并联机构,具有一定的研究价值。该方法适用于判断任意一个并联机构的耦合度,具有普遍性。但是,目前的研究工作仅通过3-RRR平面并联机构证明本文理论的实用性,该机构结构比较简单,要真正在实践中体现其价值,还需要通过编制软件将本文的理论分析过程程序化,形成一套对并联机构约束度、耦合度分析的完整理论,从而减少大量的重复工作。
猜你喜欢
制造技术与机床(2022年5期)2023-01-06
油气藏评价与开发(2022年2期)2022-11-27
中华老年多器官疾病杂志(2022年10期)2022-11-21
现代食品科技(2022年8期)2022-09-02
振动与冲击(2022年11期)2022-06-17
河北工业大学学报(2016年1期)2017-01-06
大众科技(2015年11期)2015-11-24
组合机床与自动化加工技术(2015年1期)2015-11-03
北京航空航天大学学报(2014年1期)2014-12-19
中学生数理化·七年级数学人教版(2014年6期)2014-09-18
