基于UG的苹果采摘机械臂与末端执行器的结构设计
2021-04-19 13:26朱容芳朱煜华
农机使用与维修 2021年4期
朱容芳,朱煜华
(1.广西大学 机械工程学院,南宁 530004;2.四川农业大学 动物医学院,四川 雅安 611130)
0 引言
苹果作为最为常见的水果之一,资料显示2012年,我国苹果种植面积就达到230万hm2,产量达3800万t,且近几年中国在苹果生产、出口和消费上遥遥领先其它国家[1],水果种植业的迅速发展提升了果园收获机械的市场需求,针对商品果采摘我国目前存在的相对较多的是机械手“一对一”模式,运用振摇法进行非商品果的采摘,极大提高了采摘效率。
1 工作原理
苹果采摘机械臂与末端执行器的机构包括动力机、曲轴、摇杆、可伸缩式机械臂、机械爪。机器工作时,通过机械臂的伸缩调整机械爪与树干的距离,距离合适后,张开机械爪抓住树干,由于大多果园中果树整齐种植,因此两侧的机械爪都可以抓住树干,然后,原动机带动曲轴开始转动,再通过摇杆将动力传递给末端执行机构,使苹果树左右摇晃产生惯性力,以此对苹果的果柄加以力的作用,当惯性力大于果柄与树枝连接的结合力,或者苹果与果柄的结合力时,苹果就会被摇晃下来,而后收集起来即可完成苹果的采摘,结构设计图如图1所示。
2 结构设计
2.1 曲轴摇杆的设计与分析
机械爪抓取树干的部位离地越高,全振幅越大,阻力矩越小,取苹果树直径为100 mm,正常土壤环境下,采用振动台进行试验,得到最佳夹取位置为h=750 mm,振动最大幅角为3°,可得全振幅S≈80 mm,曲柄半径r与全振幅S之间的关系为S=2r,故,曲轴半径为40 mm,设计曲轴结构如图2。

1.曲轴;2.摇杆;3.伸缩机械臂;4.机械爪;5.原动机
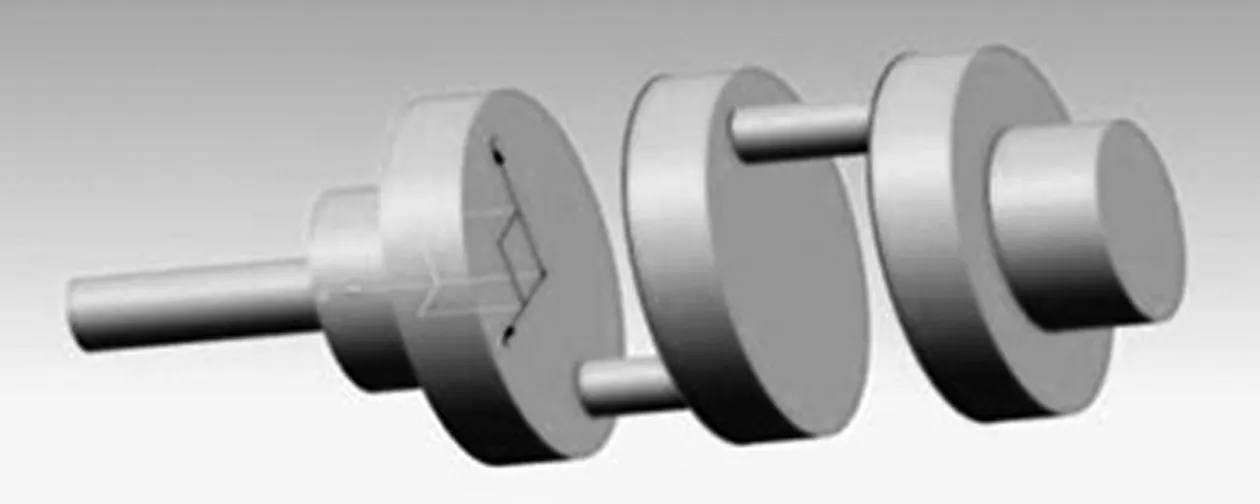
图2 曲轴设计图
2.2 机械爪的设计与分析
机械爪计算夹紧力可按照公式:F≥K1K2K3mg 进行计算。其中F为夹紧力N;K1为安全系数;K2为工作情况系数;K3为方位系数m被抓取物件的质量。
分析后取K1=1.6、K2=0、K3=1.25,估算苹果树的平均重量为150 kg,计算得F≥2940 N。
考虑到夹取的是苹果树干,相对于夹取果实来说较为简易,查阅资料可知在相同的夹紧力情况下,圆弧形状的曲线型手指对树干造成的损伤要远远小于直线型手指带来的损伤[3]。故确定,采用回转式的二指夹取夹持机构,夹持手指采用圆弧形式。
据统计,果园栽培壮年结果苹果树的主干直径平均在90~180 mm之间。因此机械手指的设计夹持直径范围为80~200 mm,夹持的纵向宽度为80 mm。
固定进给螺旋杆(简称进给螺杆)的设计中进给螺杆所受轴向力为F,其大小就是与螺旋滑块之间的摩擦力,可通过F=μmg来计算,螺旋滑块与进给螺杆的材料都为钢,查阅资料得μ为0.1,螺旋滑块质量为0.5 kg则F=0.49 N。
进给螺杆参数的详细设计:
(1)进给螺杆公称直径d=14 mm,小径d2=12.06 mm,螺距P=2 mm;(2)螺纹导程Ph=6 mm;(3)旋合长度L=100 mm;(4)旋合圈数m=8;(5)螺纹工作高度H=1 mm;(6)螺纹表面工作压强q=0.0015 MPa。
校核工作压强q<[P],因此符合强度要求。图3为进给螺杆的位移形变图。可以看出形变最大的位置在螺纹处,最大变形量为6.047 7×10-6m,查阅资料取螺杆许可挠度[y]=0.000 5L,L=0.13 m;[y]=6.5×10-5m>6.047 7×10-6m,故强度符合要求。机械爪的设计图如图4所示。
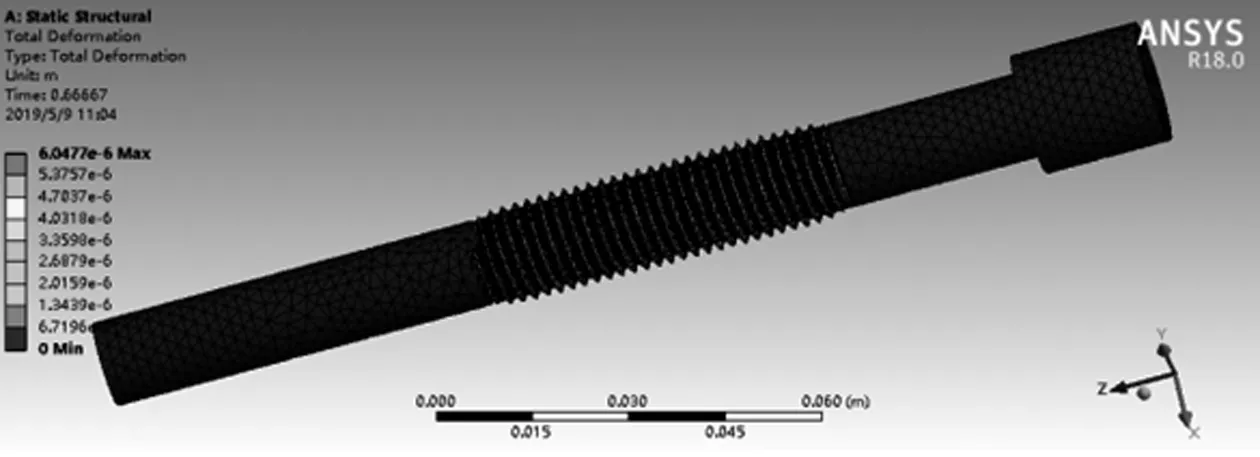
图3 位移形变图
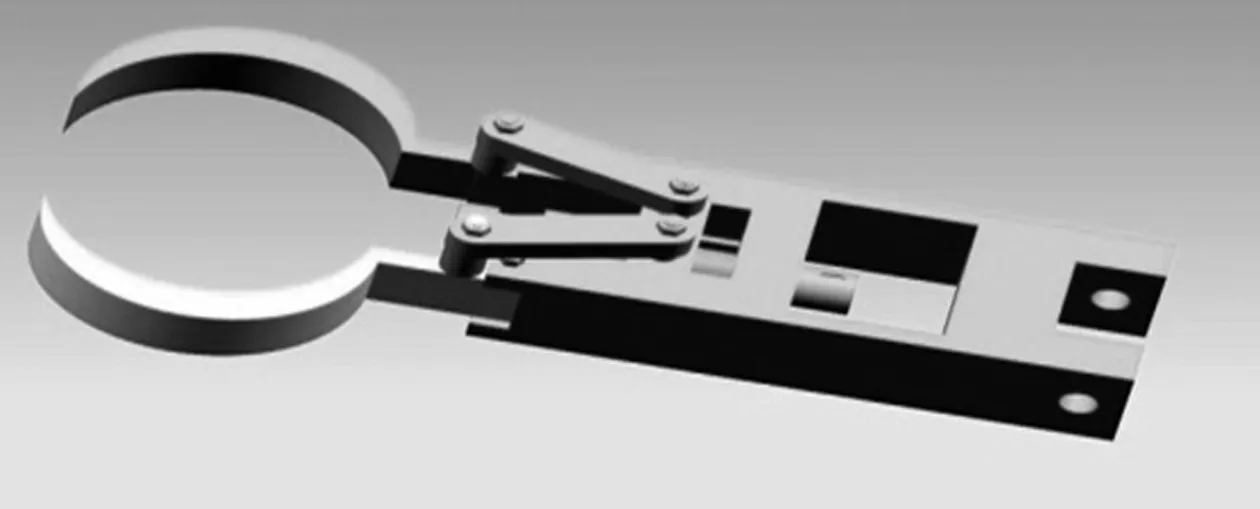
图4 机械爪的设计图
机械爪的工作原理主要是由夹持手指、进给螺旋杆、夹持连杆、螺旋滑块、橡胶垫等组成,螺旋滑块与进给螺旋杆之间通过螺纹配合连接,夹持连杆一端铰连在螺旋滑块上,另一端铰连在夹持架上,橡胶垫安置在夹持架上。机构初始处于闭合夹紧状态,当进给螺旋杆开始转动时,配合在其上面的螺旋滑块会向后端移动,同时,铰接于其上的夹持连杆向左右两端展开,夹持手指也会以一定角度打开,使机械爪张开。同时机械爪夹紧树干时,夹持架表面的弹性橡胶垫便会起到保护、防松与缓震的作用。
2.3 机械伸缩臂的设计
伸缩机构采用单级液压缸伸缩系统,设计机构图如图5所示。本伸缩机械臂初始长度为1.5 m,最大伸长长度可达2.5 m,能够满足大部分果园的采摘工作。
设计液压缸内径D1为100 mm,活塞杆直径D2为80 mm,工作压力平均约为p1为2 MPa,机械效率δ=0.98。
当无杆腔进压力油时,可承受的最大负载
当有杆腔进压力油时,可承受的最大负荷
在进行了机械的设计后,利用UG软件对其进行虚拟装配得出,整组工作机的装配如图6所示

图5 液压伸缩臂的设计
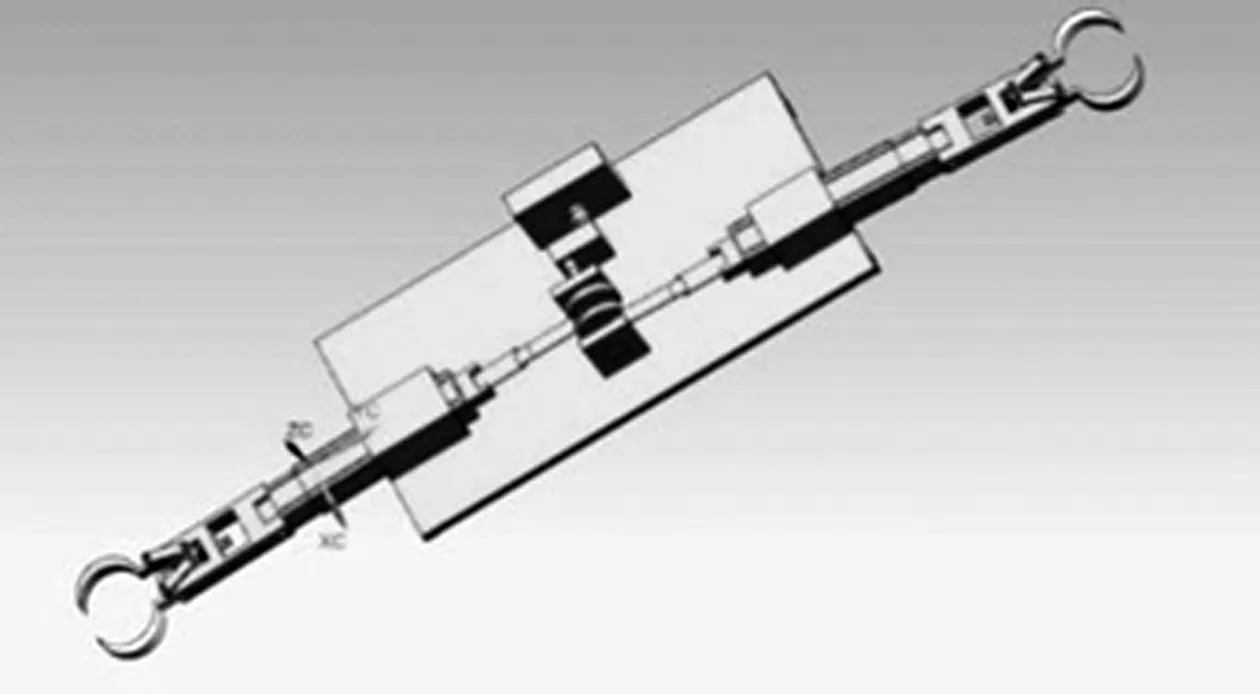
图6 整体装配图
3 总结
以苹果的采摘收获为研究对象,进行分析设计,研究现有技术,提出一种高效苹果采摘机械的设计方案;对苹果采摘机械臂与末端执行器的具体结构进行设计,设计的主要内容包括高效的苹果采摘动力机构、采摘机械爪、液压伸缩臂等。应用UG软件对本产品进行了建模与运动仿真,验证了设计的可行性。
(03)
猜你喜欢
电脑爱好者(2022年5期)2022-05-30
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
装备制造技术(2019年12期)2019-12-25
制造技术与机床(2019年4期)2019-04-04
橡塑技术与装备(2018年20期)2018-10-20
橡塑技术与装备(2018年10期)2018-05-18
制造技术与机床(2017年5期)2018-01-19
中南大学学报(自然科学版)(2016年2期)2017-01-19
机电信息(2014年29期)2014-02-27