
高位堆垛叉车柔性举升运动规划研究
2021-04-19 06:30叶国云
起重运输机械 2021年6期
叶国云 张 巍 储 江 王 班 ,2
1宁波如意股份有限公司 宁波 315600 2杭州电子科技大学机械工程学院 杭州 310018
0 引言
随着现代物流运输业的高速发展,高位立体仓库已逐渐成为现代物流行业不可或缺式的组成部分。高位仓储堆垛叉车是立体仓库的重要仓储搬运装备,是实现物流机械化作业、减轻工人搬运劳动强度、提高作业效率的主要工具,一般应用于巷道式与窄巷道式货架库,该类库房具有投资小、建设周期短、存储物资及作业方式灵活、运行费用低等优势特点[1]。随着技术的日趋成熟,叉车自动化是叉车技术发展的一个重要方向,目前国外部分叉车制造商已开始对叉车自动化展开研究,通过在普通叉车的基础上增加自动化控制模块、安全控制模块、导航控制模块、无线接口模块等,实现叉车的“双模式”作业,即人工操作作业和自动化控制作业[2]。高位叉车的自动化作业模式与人工作业模式存在一定差别,一般情况下,自动化作业模式下叉车本体处于静止状态,无需考虑叉车水平行驶对举升运动的影响,但需要根据自动堆垛的高度,提前对叉车的堆垛举升运动进行合理规划,在保证堆垛效率的前提下减小系统冲击、增加系统稳定性。
本文以高位堆垛叉车自动堆垛作业过程中的举升运动为研究对象,根据叉车纵向稳定性要求,给出叉车举升运动允许的最大加速度。在此基础上,基于三角函数加减速的S形曲线对升降运动进行规划和仿真研究,并与传统三角形加减速的S形曲线进行对比分析。
1 高位拣选车纵向稳定性学分析
高位堆垛叉车自动堆垛作业过程系统纵向稳定学简化模型如图1所示。假设叉车本体质量为m1,叉车质心O1距离前轮心距离为l1,距离后轮心距离为l2,前后轮所受地面反作用力分别为Ff和Fd,举升货物质量为m2,货物质心O2与前轮水平距离为l3,货物举升方向上的竖直向上加速度为ah。
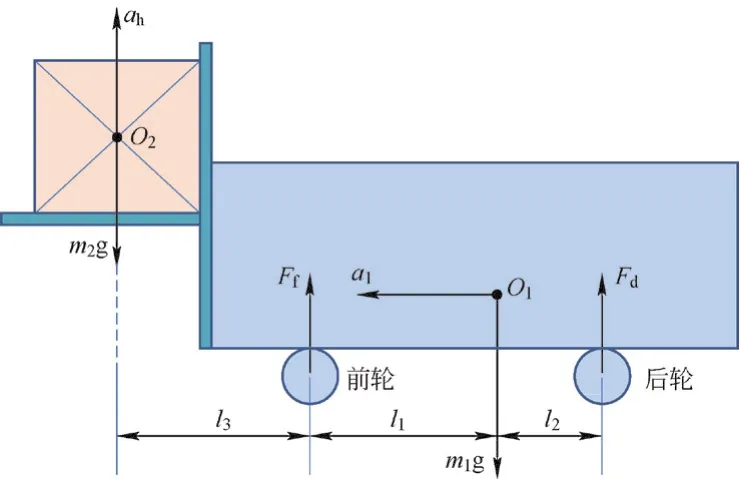
图1 高位堆垛叉车纵向稳定简化模型
叉车静止举升货物时,设前桥受力为Ff,后桥受力为Fd,对车体以前桥为支点,根据力矩平衡公式有
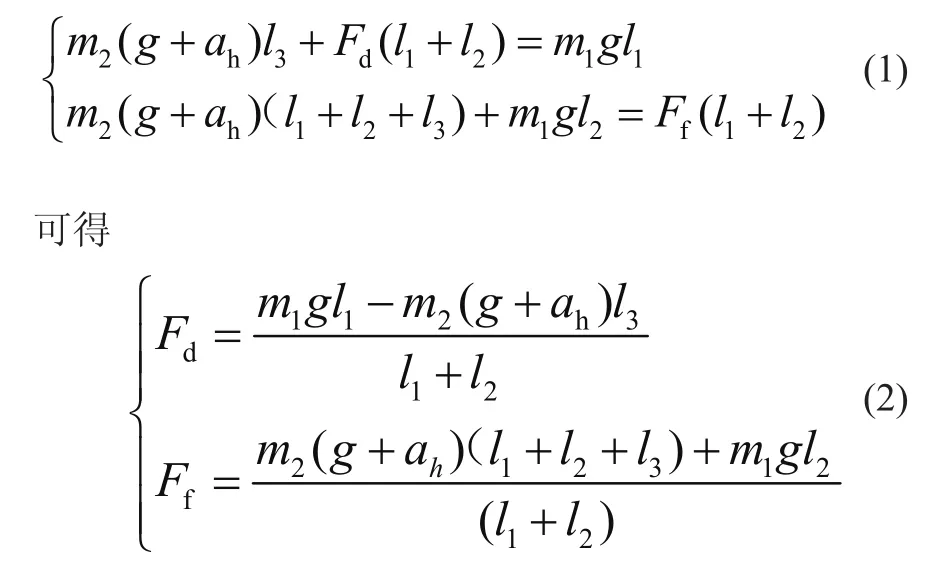
叉车前倾的临界条件为Fd=0,求得此时举升加速度为
2 基于三角函数型S曲线升降运动加减速算法
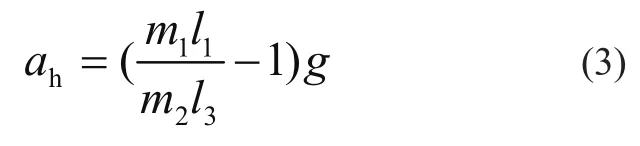
S形曲线加减速方法广泛用于频繁启停的运动控制系统之中,如数控机床[3]、工程机械[4]、电机控制[5]及转动台[6]等场合。S形曲线加减速是指系统在加、减速阶段的速度曲线形状为S形,保证了速度光滑、加速度连续,最大限度地减小由速度、加速度的变化对机械系统造成的冲击。一般情况下,S形曲线包括加速、匀速及减速三个过程,加速过程分为加加速、匀加速及减加速阶段三个,减速过程包括加减速阶段、匀减速阶段和减减速阶段。本文将基于三角函数的改善型S形加减速方法[7](如图2所示),应用于高位拣选叉车的升降控制中,结合稳定性及举升货物允许的减速度界限值,以及叉车最大允许的升降速度和举升位移,给出合理的叉车升降轨迹规划。
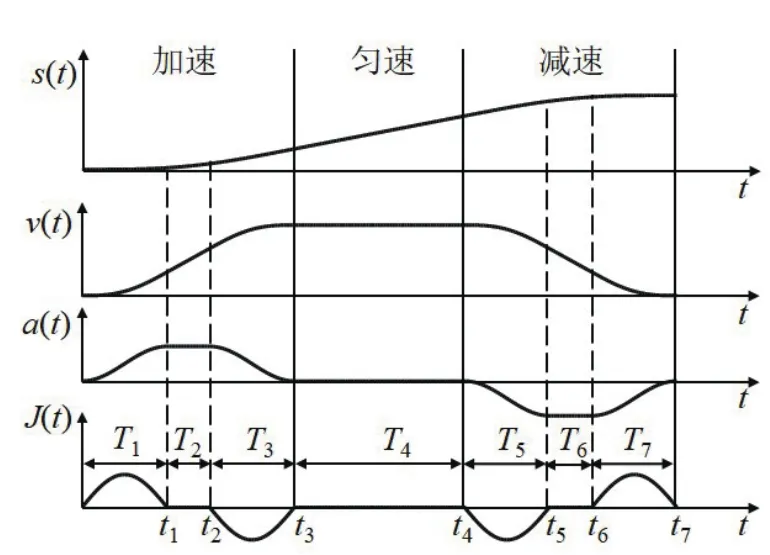
图2 三角函数型S曲线加减速过程示意图
根据三角函数知识,并结合边界条件,可得加速过程中货叉运动表达式为
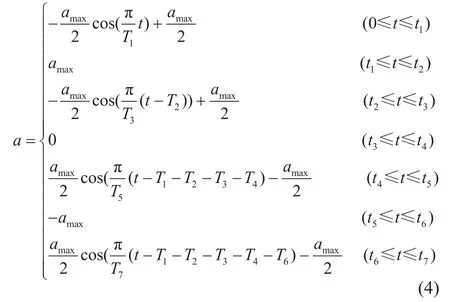
对于叉车运动而言,考虑叉车效率及安全,可将加减速过程中的匀加速和匀减速过程省去,此时货叉升降运动加速度简化为
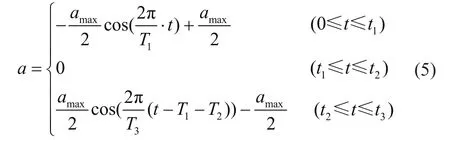
对上述加速度分别进行一次积分和二次积分即可得到货叉运动速度v和位移s表达式。假设货叉加减速过程中货叉加速度和速度最大值分别为amax和vmax,一般情况下,加速过程和减速是对称的,此时有,加速过程中的位移,同理减速过程中的位移为,则货叉举升运动分为三种情况:
1) 当货叉总行程s>sa+sd时,此时货叉升降运动包含加速、匀速、减速三个运动阶段,货叉速度可以达到最大值vmax。
2) 当货叉总行程s=sa+sd时,此时货叉升降运动包含加速、减速两个运动阶段,货叉速度可以达到最大值vmax。
3) 当货叉总行程s<sa+sd时,此时货叉升降运动包含加速、减速两个运动阶段,货叉速度达不到最大值vmax。
3 仿真分析
以某高位自动堆垛叉车进行算例分析,各参数为:叉车质重m1=6 750 kg,货物质量m2=1 500 kg,l1+l2=1 926 mm,l1=790 mm,l2=1 136 mm,l3=910 mm。将相关参数代入式(3)可得ah=2.9 g,结合叉车结构强度并考虑留有足够的安全裕度,取amax=0.5 m/s2,vmax=0.45 m/s。假设堆垛行程s=3.69 m,则此时sa=sd=0.405 m,有s>sa+sd,此时货叉举升运动包含减速、匀速、减速三个阶段。作为对比,同时对三角形加减速S形曲线升降运动进行仿真。由仿真结果图3可知,货叉升降运动由先后经历加速(1.8 s)、匀速(6.4 s)及减速(1.8 s)三个阶段,总举升行程为3.69 m,举升过程中货叉加加速度J连续,保证了货叉的稳定性,减小了系统冲击,与理论分析结果相一致。三角形S曲线升降运动举升同样高度所用时间相同,但加加速度J在举升过程中存在突变,会给系统造成一定的冲击。仿真结果表明文中所提出的三角函数型S形曲线可以在不降低作业效率的前提下,实现货叉柔性举升,减小系统冲击。
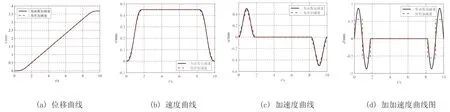
图3 货叉举升运动仿真结果
4 结论
本文针对高位堆垛叉车自动堆垛作业过程,根据叉车作业过程中的纵向稳定条件及操作员的舒适性,分析给出了货叉举升运动的极限加速度。开展了基于三角函数S形加减速曲线的货叉举升运动规划,仿真表明所提出的加减速曲线在保证作业效率的和稳定性的前提下,实现货叉加加速度的连续性,从而实现柔性举升,减小系统冲击。
猜你喜欢
南京航空航天大学学报(2022年6期)2022-12-25
中国储运(2022年11期)2022-11-30
中国储运(2022年11期)2022-11-30
中国储运(2022年11期)2022-11-30
磷肥与复肥(2021年7期)2021-08-31
数学小灵通·3-4年级(2021年3期)2021-04-13
中华养生保健(2020年3期)2020-11-16
今日农业(2020年19期)2020-11-06
今日农业(2020年18期)2020-10-27
物流技术与应用(2020年1期)2020-03-16
