永磁同步电机有限时间预设性能控制
2021-04-29 04:06陈子印贾鹤鸣
控制理论与应用 2021年4期
陈子印 ,林 喆 ,贾鹤鸣 ,王 鹏
(1.中国空间技术研究院 北京空间机电研究所,北京 100093;2.三明学院 信息工程学院,福建 三明 365004;3.南京理工大学 能源与动力工程学院,江苏 南京 210094)
1 引言
永磁同步电机采用矢量驱动,具有高功率因数、高转矩惯量比、波动力矩小等优点在低速高精度光机伺服控制系统中作为直驱执行器件得到了广泛应用,随着高分辨率成像精度要求的不断提高,对光机伺服系统的稳定时间和动态性能提出了更高的要求[1–2].
有限时间稳定性的提出对现代非线性控制的发展起到着重要的影响[3–4],相比于渐近稳定的结果,有限时间稳定具有更大的优势,能够保证系统误差轨迹或状态轨迹在有限时间内从任意初始点收敛到原点或 其附 近邻 域[5].目前针 对永磁 同步 电机 的有 限时间控制大多与滑 模控制方法相结合,如终端滑模控制[6–7],并在此基础上为解决系统状态接近原点时终端滑模的奇异值问题及远离平衡点处收敛缓慢的问题,分别提出了非奇异终端滑模[8]和非奇异快速终端滑模等改进方法[9–10],由于工程中电机调速系统的控制目标总是要求在有限时间内完成,这使得对有限时间稳定的研究具有重要的工程应用价值.
近年来,针对永磁同步电机这一类仿射非线性系统,反步法[11]提供了一种迭代构造李雅普诺夫能量函数的控制系统设计方法.构造的李雅普诺夫函数能够保证闭环系统信号的全局稳定,但反步法在迭代求解时,需要不断对中间虚拟控制量求导,当系统的相对阶较大或虚拟控制量的形式比较复杂时,求导计算过程将会变得复杂,会导致计算量膨胀[12–14].因此文献[15]提出了动态面控制,基于一阶微分过程实现对导数的数值求解.文献 [16]提出了基于二阶滤波过程的滤波反步法,通过构造辅助信号能够有效实现对虚拟控制量导数的逼近,成功用于 解决机电系统控制 问题[17].但由于滤波反步法仅能实现渐近稳定,收敛速度较慢.为改进 这一不 足,文 献 [18–19]分别基于动态面和滤波反步法实现了有限时 间稳定控制.文 献[20–21]进一步结合模糊系统提出自适应控制算法解决了模型存在不确定性下的控制问题.
典型控制系统设计要素主要体现在平衡点的稳定性、系统的收敛时间、系统的瞬态和稳态特性等方面.目前,基于李雅普诺夫稳定性理论的控制器设计仅侧重于满足系统的稳态性能,而对系统的瞬态和稳态性能(包括超调量、收敛时间和稳态误差)关注较少,且稳定性证明仅能给出控制参数的取值范围,而对系统性能的调整仅能依靠对控制参数的后验优化得到[17],无法预先设计.预设性能函数[22–23]正是在此背景之下提出的,所谓预设性能是指在保证跟踪误差收敛到一个预先设定的任意小的区域的同时,保证收敛速度及超调量满足预先设定的条件,为解决控制性能问题提供了一种新的约束条件,文献 [24–26]将预设性能与常规反步法结合解决一类严反馈非线性系统的控制问题,并用于解决汽车悬架控制[27]、机械臂控制[28]和伺服系统控制[29].为避免单一指数收敛形式无法兼顾初态的缓慢收敛和稳态的快速收敛的特性[30–31],文献[32]给出了分段连续预设性能函数,能够调整初始阶段收敛速度.文献 [33]为避免跟踪初态引起输入饱和,设计了在线调节的预设性能函数.上述研究均未涉及有限时间控制问题.为此文献 [34–35]提出了有限时间预设性能函数的概念,进一步提高收敛速度.
本文在文献 [17]研究基础上,将有限时间预设性能约束和有限时间控制方法相结合.首先,采用有限时间预设性能函数约束跟踪误差在有限时间内收敛,相比于常规的预设性能函数的无限时间收敛特性具有更快的收敛速度;其次,采用基于滤波反步法的有限时间控制能保证转换误差有 限时间 收敛并 增加系统的鲁棒性;最后通过仿真实验进一步验证算法的有效性.
2 控制问题描述
2.1 电机建模
在光学扫描成像系统中大多采用永磁同步电机作为执行机构,这里针对表贴式永磁同步电机,采用同步旋转dq坐标系下的模型对同步电机的跟踪控制问题进行分析[1],并做如下假设:
假设1假设空间磁场呈正弦分布,忽略磁路不饱和,不计磁滞和涡流损耗影响.
假设2假设模型参数已知,忽略模型参数不确定性.
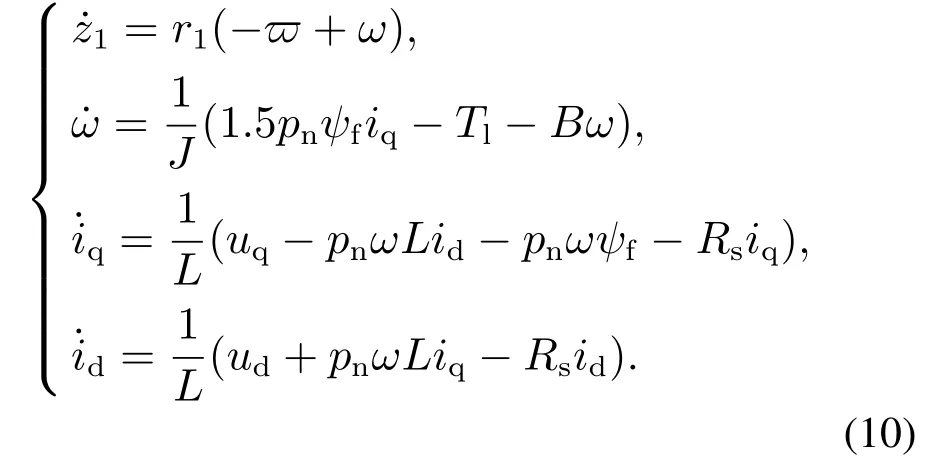
建立表贴式永磁同步电机的数学模型为
其中:θ为电机机械转角;ω为转子机械角速度;id,iq分别为dq同步旋转坐标系下直轴与交轴电流分量;Ld和Lq分别为电机直轴和交轴电感;J为等效到电机轴的转动惯量;Te为电磁转矩;Tl为电机负载转矩;B为粘滞摩擦系数;Rs为定子相电阻;pn为定子绕组极对数;ψf为永磁体产生的磁链;ud和uq分别为在dq同步旋转坐标系中直轴与交轴电压分量,对于表贴式永磁同步电机有Ld=Lq=L.
假设3假设电机负载转矩Tl有界,且存在上限使得
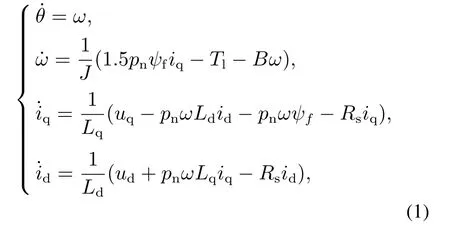
引理1[36]考虑电机模型(1)中负载力矩Tl的受扰变化,设计如下扰动观测器能够保证对负载力矩Tl的扰动估计误差最终有界收敛.
注1根据假设1,当扰动变化率满足条件,则能够保证估计误差满足条件,进而通过选择合适的观测器增益σ能够保证收敛到原点较小邻域ε(σ).
2.2 预设性能函数及误差转换
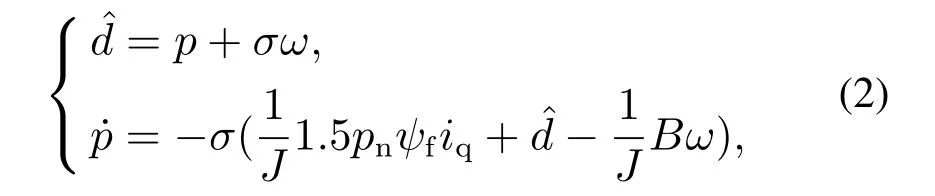
本节通过构造有限时间预设性能函数实现对误差信号收敛特性的约束,进而避免系统性能退化.首先,给出如下有限时间性能函数的定义:
定义1[34]对于一个待约束误差信号e(t),连续函数ρ(t):R+→R+称为其有限时间性能函数,如果满足以下条件成立:
i)ρ(t)是正的且严格单调递减,t ∈[0,T0);
iii)ρ(t)=ρT0,∀t≥T0,
其中:ρ0和ρT0为待设计参数,分别表示有限时间预设性能函数的初始条件和收敛边界,满足|e(0)| <ρ0,,T0表示收敛时间.
然后,根据定义1本文设计的有限时间预设性能函数为如下形式:
其中α0~ α3为待设计系数,可以依据如下约束条件计算得到:

注2约束条件中对的导数约束则保证了在初始阶段,避免被约束信号e(t)为了顺应传统预设性能函数的收敛斜率而导致初始控制器输出信号较大超调的不足[33].根据式(3)中给定的相应预设条件ρ0,ρT0和T0则能够根据式(4)确定多项式的参数,进而得到满足条件的有限时间预设性能函数.
注3对于预设性能函数的选取,现有文献给出了不同的选取方式:
i) 文献 [22]给出的预设性能函数ρ(t)为如下形式:

其中:ρ0>ρ∞>0,ρ0=ρ(0)表示初始误差范围,=ρ∞>0表示稳态误差范围,时间常数κ >0,预设性能函数ρ(t)可以约束误差的收敛过程,但从函数的指数形式可以看出该预设性能函数为无限时间收敛,收敛速度较慢,无法满足有限时间收敛的性能要求.
ii) 文献 [32]给出分段连续预设性能函数ρ(t)为如下形式:

其中:i=0,1,2,···,n,t0=0,β(i)>0,ρ0(i)=ρ(ti),ρ0(i)>ρ∞(i)>0.采用分段连续的预设性能函数能够有效改善单一指数形式下无法兼顾初始阶段和稳态阶段收敛速度可调的不足,提高收敛速度.但是该分段函数为非光滑函数,会增加控制系统复杂度.
iii) 文献[34]给出了有限时间预设性能函数ρ(t)为如下形式:

综上所述,图1中给出了以上几种预设性能函数的对比曲线,可以看出式(3)给出的有限时间预设性能函数曲线初始阶段斜率较缓,能在有限时间收敛且无超调量.
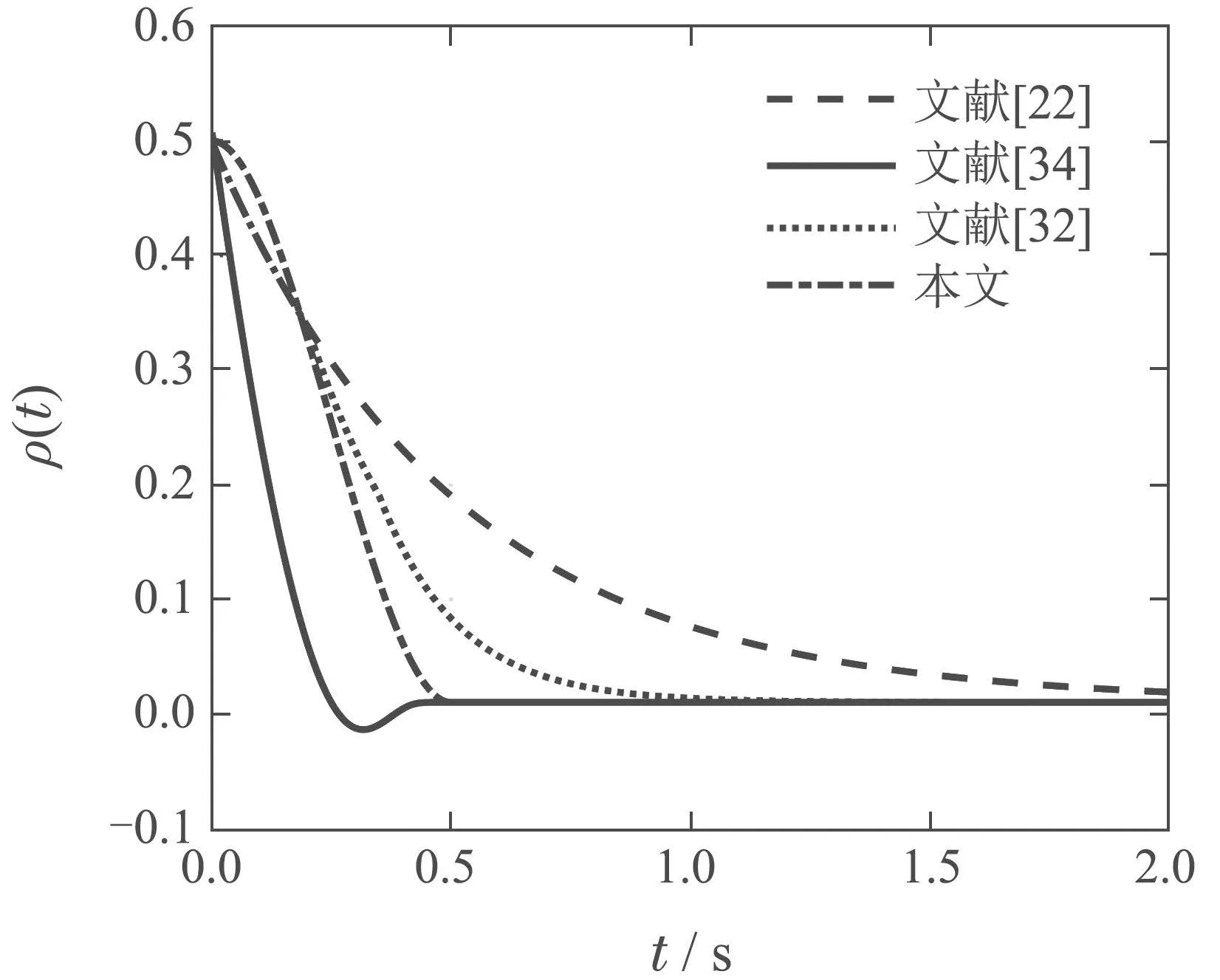
图1 不同预设性能函数对比示意图Fig.1 Comparison of different prescribed performance functions
对于给定连续可导的指令角度为θd,定义角度跟踪误差为

对角度跟踪误差可以通过如下不等式进行约束:

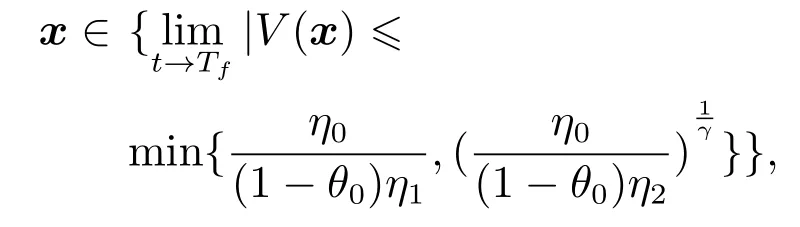
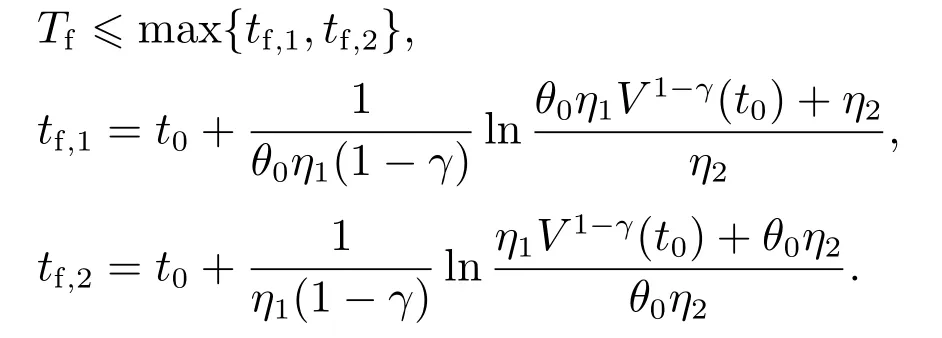
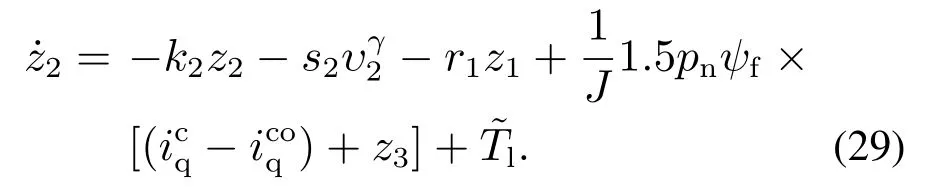
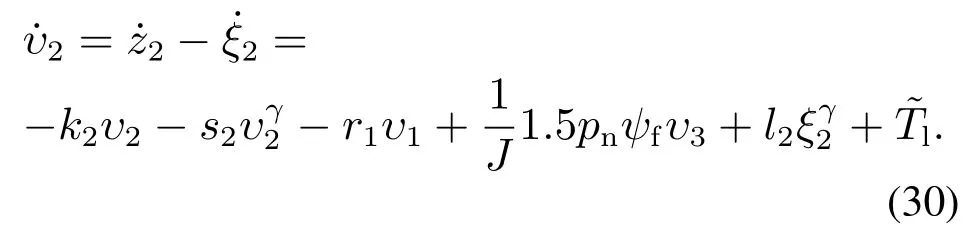
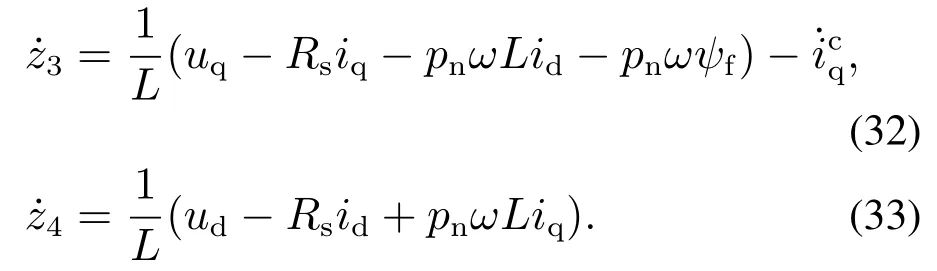
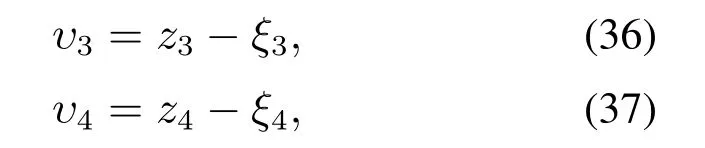
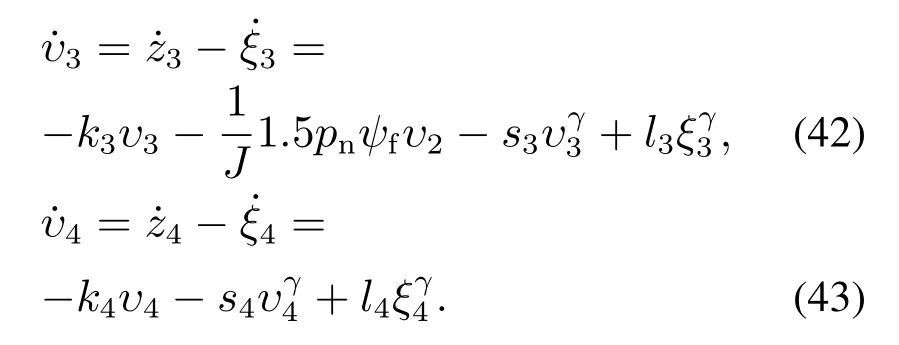
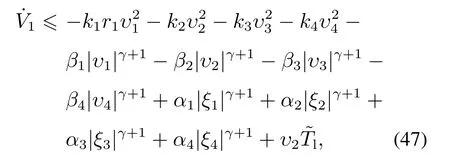
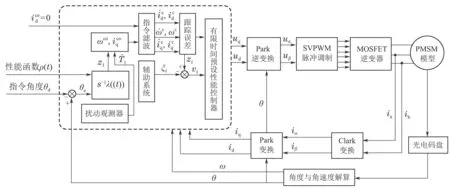
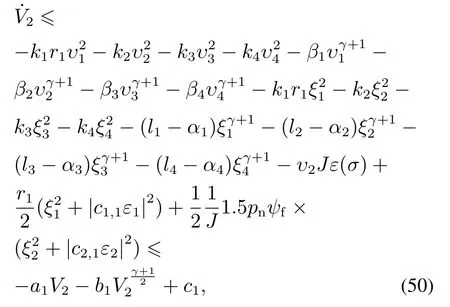
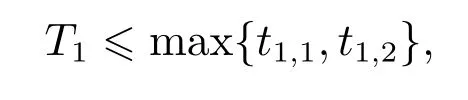
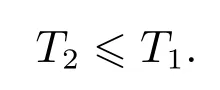
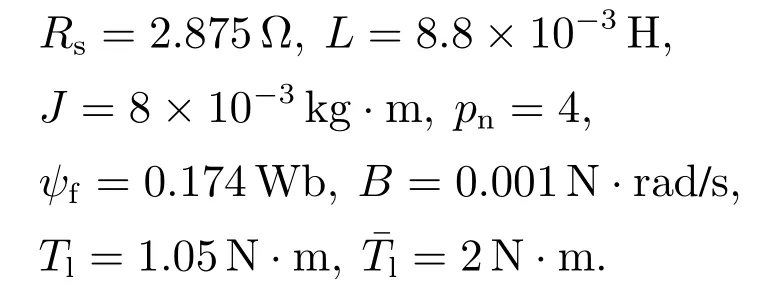
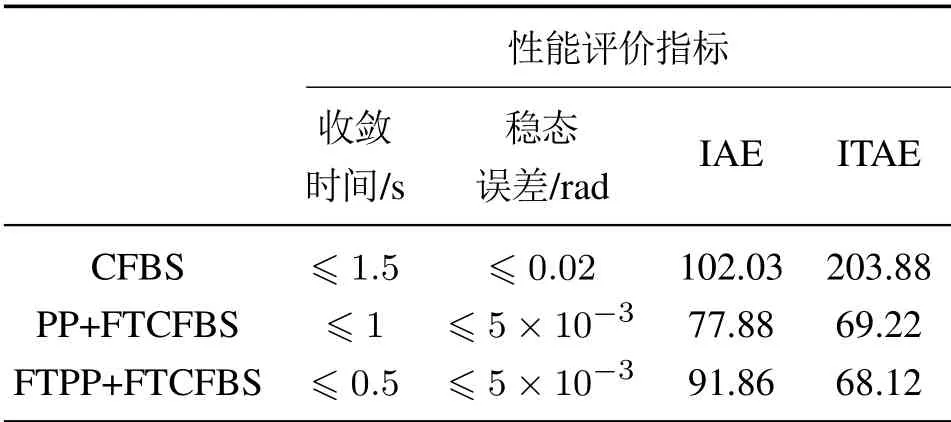
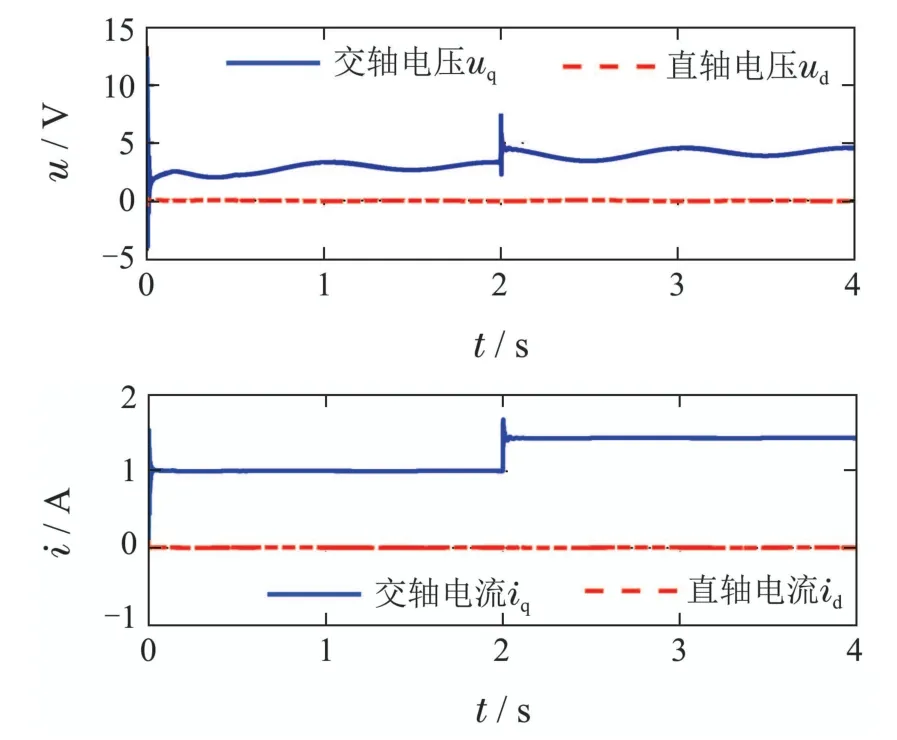
其中参数满足0 下面本文通过引入光滑可逆函数S(z1),将式(6)中的约束条件转换为如下形式: 其中z1为转换误差. 因为S(z1)为严格单调递增函数,且ρ0>ρT0>0,因此可以得到其逆变换为 对上式两边求导,将式(1)代入得 根据转换后的跟踪误差式(9),电机模型式(1)可以重写为 注4对于预设性能控制,考虑系统(1)在约束条件(6)下的控制问题,通过引入光滑可逆函数能够将式 (6) 中的不 等式约束转化为一种无约束形式如式(9)所示,再通过设计反馈控制律保证转化误差z1稳定即能够保证跟踪误差θe稳定且满足预设性能指标. 引理2[16]对于连续函数xco i,其一阶导数形式可以通过如下滤波过程进行逼近: 引理3[37]对于任何x,y ∈R,若常数c >0,d>0,ϕ(x,y)为任意正的实函数,则下列不等式成立: 定义2[3]考虑如下系统: 其中:f(·)为非线性函数映射,x ∈ D表示系统的状态向量,且在平衡点处f(0)=0. 对于从平衡点附近邻域U ⊆ D出发的任意给定的初始状态x(t0)∈ U,若存在实数δ >0及有限时间Tf(δ,x(t0)),满足,则称系统在平衡点为实际有限时间稳定,若U=D=Rn则为全局实际有限时间稳定. 引理4[18]考虑非线性系统(15),如果存在连续正定函数V(x)和标量η1>0,η2>0,0<γ <1,0<η0<∞,使得,根据定义2系统的轨迹是实际有限时间稳定的,若V(x)为径向无界,则为全局实际有限时间稳定,系统解的集合定义如下: 其中0<θ0<1. 稳定时间为 首先,定义角度跟踪误差为 对上式两边求导得 其中:ωc为角速度状态ω的虚拟控制量ωco的滤波信号,z2为角速度跟踪误差定义为 设计虚拟控制量为 其中:控制参数k1>0,s1>0,0<γ <1;符号表示为sgnυ1|υ1|γ,sgn为标准符号函数,并在后续章节中沿用该定义形式,υ1为滤波误差补偿信号,定义为 其中:ξ1为辅助信号,通过反馈回路对滤波误差信号ωc−ωco进行补偿,定义为 其中:参数l1>0,ξ2为待设计辅助信号,初始条件ξ1(0)=0. 将式(19)代入式(17)整理得 进一步对式(20)求导,将式(21)和式(22)代入得 根据式(18)对速度跟踪误差z2求导,将式(10)代入整理得 设计虚拟控制量为 其中:参数k2>0,s2>0,0<γ <1,为对负载转矩Tl的估计,估计误差定义为,υ2为滤波误差补偿信号定义为 其中:ξ2为辅助信号,通过反馈回路对滤波误差信号进行补偿,定义为 其中:参数l2>0,ξ3为待设计辅助信号,初始条件ξ2(0)=0. 将式(26)代入式(24)整理得 进一步对式(27)求导,将式(28)和式(29)代入得 定义直轴电流误差为 由于采用磁场定 向控制策略[5],所 以根据式(25)和式(31)对交直轴电流误差求导得 设计控制输入分别为 其中:参数k3>0,k4>0,s3>0,s4>0,0<γ<1,υ3和υ4为滤波误差补偿信号定义为 其中ξ3和ξ4为辅助信号,定义为 其中:参数l3>0,l4>0,初始条件为ξ3(0)=0,ξ4(0)=0. 将式(34)和式(35)代入式(32)和式(33)整理得 进一步对式(36)和式(37)求导,将式(38)–(41)代入得 综上,得到有限时间预设性能控制系统的结构框图如图2所示. 定理1考虑系统模型式(10),选择滤波器如式(11),构造扰动观测器如式(2),设计控制量形式如式(34)和 式(35),构造滤波误差补偿系统如式(21)(28)(38)–(39),则能够保证闭环信号有限时间收敛且角度误差信号θe满足式(6)中的预设性能条件. 此定理的证明可以通过以下步骤形成: 步骤1构造滤波补偿信号的李雅普诺夫函数为 对上式求导,将式(23)(30)(42)–(43)代入得 根据引理3,有如下不等式关系成立: 根据式(46)将式(45)进一步放缩为 其中: 图2 预设性能滤波反步控制系统结构框图Fig.2 Block diagram of prescribed performance command filtered backstepping controller 步骤2构造李雅普诺夫函数为 对上式求导,将式(21)(28)(38)–(39)和式(47)代入得 其中: 由于李雅普诺夫能量函数V2为径向无界,如果设计参数满足条件 2k1−1>0,,k3>0,k4>0,l1−α1>0,l2−α2>0,l3−α3>0,l4−α4>0,β1>0,β2>0,β3>0和β4>0.根据引理4中的结论,信号ξi和υi(i=1,2,3,4)为全局实际有限时间稳定,即在有限时间T1内收敛于紧集Ω1定义如下: 其中0<θ0<1. 稳定时间为 其中: 步骤3根据定义zi=υi+ξi得 稳定时间: 进而得到信号z1也收敛于紧集Ω2的结论,所以z1∈ L∞,且S(z1)为单调函数,−l 为验证本文设计控制算法的有效性,对永磁同步电机伺服系统进行仿真研究.PMSM模块参数设定为 电机期望指令角度为 电机初始条件为[idiqθ ω]T=[0.1 0 0.5 0]T,可以看出电机轴的初始角度与零时刻期望轨迹具有一定的偏差,进而考察具有一定初始偏差下控制系统的跟踪性能.为了对比常规预设性能与有限时间预设性能函数下的控制性能,引入无限时间预设性能参数为 同时给出本文设计的有限时间性能函数参数为 约束边界参数均为l=0.1,h=1.初始条件λ(0)=0.8,z1(0)=0.7520. 速度环指令滤波器带宽选取为ω1,n=200 rad/s,阻尼比ζ1=0.9;电流环指令滤波器带宽选取为ω2,n=2000 rad/s,阻尼比ζ2=0.9. 控制参数选取为 为验证本文提出控制算法的有效性,仿真实验给出了与有限时间滤波反步法+无限时间预设性能和滤波反步法相对比的仿真结果,可从中对比3种控制算法的性能,仿真结果如图3–6所示.图3中给出了在采用相同的控制参数下对比曲线,文献 [17]中的滤波反步法在初始跟踪阶段具有较大的超调量和较长的震荡周期,而本文提出的有限时间预设性能的算法则能够得到较为平滑的跟踪曲;图4给出了跟踪误差响应曲线,可以看出相比于无性能约束滤波反步法,具有预设性能的算法能够保证角度误差在瞬态和稳态阶段均保持在预设性能边界之内,另外本文提出的有限时间预设性能约束能够保证角度误差有限时间内收敛,相比于无限时间预设性能约束收敛速度更快.虽然文献 [17]中提到了可以通过粒子群进行参数优化以改善系统的响应特性,这就更加体现出本文应用预设性能约束的优势,相比于后验的优化方法,预设性能约束的引入能够极大改善系统的动态品质. 图3 PMSM角度跟踪响应曲线Fig.3 Angular tracking response of PMSM 图4 PMSM角度跟踪误差曲线Fig.4 Angular tracking error of PMSM 图5 PMSM交直轴电压输出曲线Fig.5 Voltage output curves for quadrature and direct axis of PMSM 图6 PMSM交直轴电流输出曲线Fig.6 Current output curves for quadrature and direct axis of PMSM 为了评价不同算法的控制性能,引入性能评价量化指标为:积分误差绝对值指标积分时间误差绝对值指标、收敛时间 和稳态误差.从 表1中可以 看出滤 波反步 法(command fltered backstepping,CFBS)收敛时间较长且稳态 误差较 大,IAE(intergal absolute error)和ITAE(intergal time absolute error)指标相比较大;有限时间控制+预设性能方法(prescribed performance and finite-time command filtered backstepping,PP+FTCFBS)和有限时间控制+有限时间预设性能的方法(fnite-time prescribed performance and FTCFBS,FTPP+FTCFBS) 相比,两种方法均能够保证稳态误差收敛到较小范围,且ITAE指标较为接近,但在有限时间预设性能约束下,跟踪误差的收敛速度更快,IAE指标略大的原因是后者采用有限时间预设性能函 数为避 免初始 斜率过大导致控制器饱和所以牺牲了一定IAE的面积. 表1 算法性能评价指标对比Table 1 Algorithm performance evaluation index comparison 图5和图6分别给出了交直轴电压控和电流输出曲线,在提高电流环指令滤波器的带宽后,电流环的响应速度明显提高. 为了验证本文设计扰动观测器的有效性,在负载力矩Tl上增加阶跃扰动为 扰动观测器参数设计为σ=10,初始条件p=0,仿真结果如图7–8所示. 图7中给出了角度跟踪曲线及跟踪误差曲线,可以看出转换误差信号z1有较小的波动,但具有预设性能约束的角度跟踪误差信号θe收敛过程完全满足预设性能要求,验证了扰动观测器在阶跃扰动下的估计性能.图8给出了相应的交直轴控制电压与电流响应曲线. 图7 阶跃扰动下PMSM角度跟踪与误差响应曲线Fig.7 Angular tracking and tracking errors response of PMSM under step disturbance 图8 阶跃扰动下PMSM交直轴电压、电流输出曲线Fig.8 Voltage and current output curves for quadrature and direct axis of PMSM under step disturbance 本文为解决永磁同步电机角度伺服系统中高动态性能的控制问题,提出了一种具有有限时间预设性能约束的有限时间滤波反步控制方法.首先,设计扰动观测器实现了对扰动的估计与补偿.其次,引入预设性能函数对角度误差进行约束,通过设计合理的收敛速度和稳态误差范围保证了角度跟踪的动态性能和跟踪精度,引入可逆变换将角度跟踪误差性能约束转换为一种等价无约束误差形式;然后,应用有限时间滤波反步法进行控制器设计,不但避免了对虚拟控制量反复求导的不足,而且通过构造辅助信号保证了滤波误差信号的有限时间收敛,进而得到转换误差及实际角度误差的全局实际有限时间稳定.最后,通过仿真实验验证了算法的有效性和抗干扰性.


3 有限时间控制器设计




3.1 位置环控制器设计








3.2 速度环控制器设计





3.3 电流环控制器设计





3.4 稳定性分析











4 仿真结果与分析







5 结论
猜你喜欢
舰船科学技术(2022年20期)2022-11-28中学数学研究(广东)(2022年17期)2022-10-09吉林大学学报(理学版)(2022年5期)2022-09-24哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18北京航空航天大学学报(2019年9期)2019-10-26电子制作(2019年9期)2019-05-30电子制作(2018年16期)2018-09-26小学阅读指南·低年级版(2017年1期)2017-03-13人生十六七(2015年6期)2015-02-28中学数学杂志(初中版)(2014年1期)2014-02-28