
基于双无迹卡尔曼滤波的锂电池SOC估算
2021-05-04 02:01刘佳俊马国庆郎锦峰
电源技术 2021年4期
邹 琳,刘佳俊,马国庆,郎锦峰
(武汉理工大学机电工程学院,湖北武汉 430070)
锂电池凭借着高能量密度和寿命长等优势被广泛应用于电动汽车[1],为了使电动汽车安全高效地运行,准确估算电池荷电状态(SOC)至关重要。
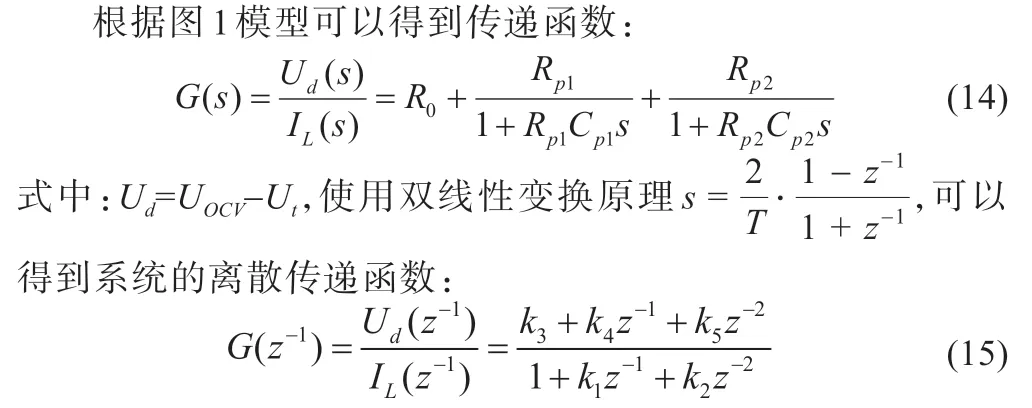
目前,国内外学者提出了许多SOC估算的方法,如安时积分法[2]、开路电压法[3]和内阻法[4]等传统算法。虽然这些方法易于实现,但安时积分法会产生累积误差从而降低SOC估算精度;而电池开路电压需要长时间静置才能准确获得,因此开路电压法不适用于电动汽车行驶状态。为解决传统算法缺陷,近年来,Piller 和Plett 等提出了卡尔曼滤波(KF)、扩展卡尔曼滤波(EKF)算法[5-6]。但是,KF、EKF 采用泰勒一阶公式对非线性系统线性化,忽略了高阶项,这会降低非线性电池系统的估算精度。因此,学者们提出了无迹卡尔曼滤波(UKF)算法。文献[7-8]证明了UKF 比EKF 具有更高的估计精度和更少的计算负担,但是它们采用的都是最小二乘法(RLS)进行参数辨识。基于上述问题,本文采用基于双UKF的电池参数辨识和SOC联合估算的方法,通过恒流和动态应力测试(DST)工况验证了所提方法对于SOC估算的准确性和稳定性,并通过不同初始误差验证所提方法的鲁棒性。模型(ECM)由于易于实现且具有足够精度而被广泛采用。本文采用如图1 所示的电池模型,其中UOCV为开路电压,Ut为端电压,R0为欧姆电阻,Rp1、Cp1为电化学极化内阻和极化电容,Rp2、Cp2为浓差极化电阻和极化电容。

图1 二阶RC 电池模型
由基尔霍夫定律可得:

式中:IL为电池电流;Up1与Up2分别为Rp1Cp1和Rp2Cp2并联网络的电压。
SOC的常用表达式如下:
1 电池等效电路模型与实验台
1.1 等效电路模型的建立
精确的电池模型是准确估算SOC的重要基础,等效电路

式中:SOCt为t时刻的SOC值;Cn为电池的额定容量;η1为充放电效率。
将式(1)~(2)整理为离散形式的表达式:
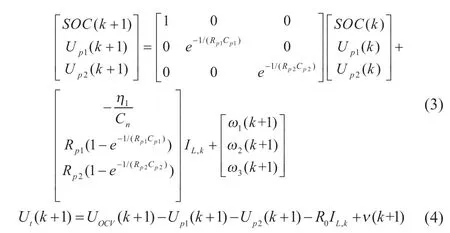
式中:ωi(i=1,2,3)和ν 为过程噪声和测量噪声,用来表征模型的不确定性。
1.2 实验台
本文实验台如图2 所示,在实验过程中,实验的环境温度均设定为25 ℃。
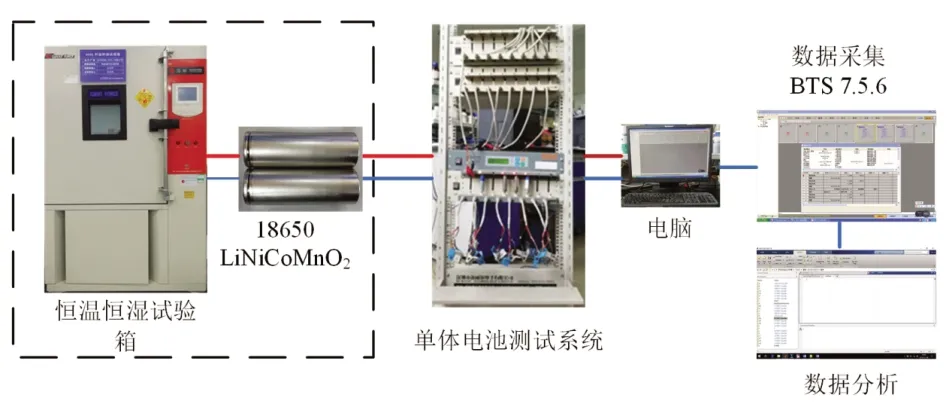
图2 电池测试实验设备
基于建立的实验台对18650 型镍钴锰三元锂电池(正极材料为LiNiCoMnO2)进行测试,电池的主要性能指标如表1所示。
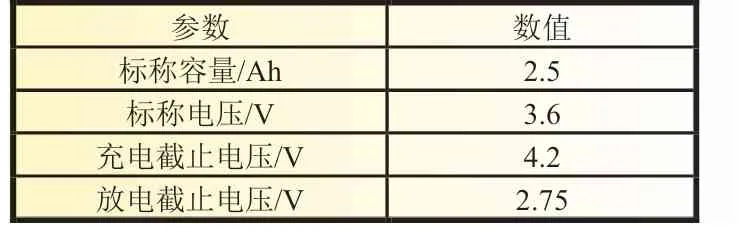
表1 LiNiCoMnO2电池的主要性能参数
1.3 OCV-SOC曲线
采用充放电脉冲特性循环测试(HPPC)实验来获取测试数据,然后绘制OCV-SOC关系曲线,将充放电时的OCV-SOC值取平均值后通过高阶多项式进行拟合,其拟合的均方根误差为0.18%。OCV-SOC曲线如图3 所示。

图3 OCV-SOC曲线
OCV-SOC拟合曲线的函数表达式为:

2 基于双UKF 的联合估算
2.1 UKF 算法
UKF 根据无迹变换逼近非线性函数的概率密度,其精度比EKF 更高[9]。
非线性系统的状态方程和测量方程为:

UKF 算法包括4 个步骤。
步骤1:初始化。

步骤2:计算sigma 点。

式中:L是输入量的维度,本文取L=3,2L+1 是sigma 点集的数量。权重值计算如下:

式中:wm、wc为权重;α 为比例因子,一般为0~1;ρ 一般为0或3-L;β 是用来融入随机变量x的验前信息,若为高斯分布,取β=2。
步骤3:时间更新。
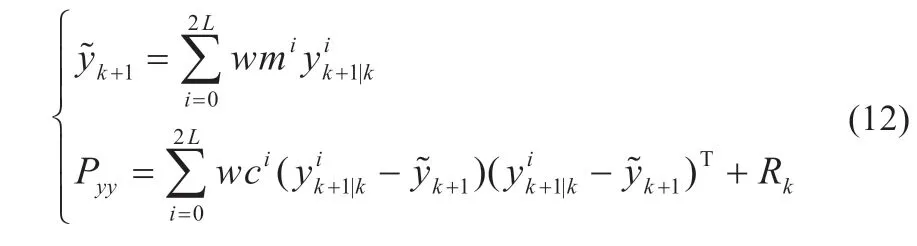
将sigma 点集向后传递,进行加权处理得到状态变量和协方差的先验估计值:

根据先验估计值,再次使用无迹变换(UT),得到新的sigma 点集:

对新的sigma 点集向后传递,进行加权处理得到观测变量的先验估计值和方差:
步骤4:测量更新。

2.2 基于UKF 的参数辨识


将式(18)带入UKF 算法过程,使用UKF 进行参数辨识,最后根据式(16)得到电池模型参数R0,Rp1,Cp1,Rp2和Cp2。
2.3 基于UKF 的SOC 估算
根据式(3)~(4),令x(k)=[SOC(k)Up1(k)Up2(k)]T,u(k)=IL,k,y(k)=Ut,可得状态方程和测量方程:

步骤1:参数初始化。参数初始化包含两个部分。一是初始化模型参数和协方差:θ(0)=[0,0,0,0,0]T,P(0)=10 000×eye(5);二是初始化状态变量和协方差:x0=[SOC(0),0,0]T,
步骤2:电池测试系统采集电流IL(k)和电压值Ut(k)。
步骤3:由SOC值通过OCV-SOC曲线关系确定开路电压值UOCV(k),可得真实的观测值y(k+1)和输入向量φT(k)。结合式(19)并带入UKF 算法中得到参数值θ(k+1),最后由式(16)计算模型参数值。
步骤4:将步骤3 得到的参数值Y 更新状态方程和测量方程[式(20)],带入UKF 算法中,从而得到下一时刻的状态变量x(k+1)。
步骤5:重复上述步骤1~4,即可实现电池参数和SOC联合估算。
将式(20)带入UKF 算法,即可估算电池的SOC。
2.4 联合估算的实现过程
基于双UKF 的联合估算算法流程如图4 所示,其具体实现过程包括5 个步骤。
3 实验和结果分析
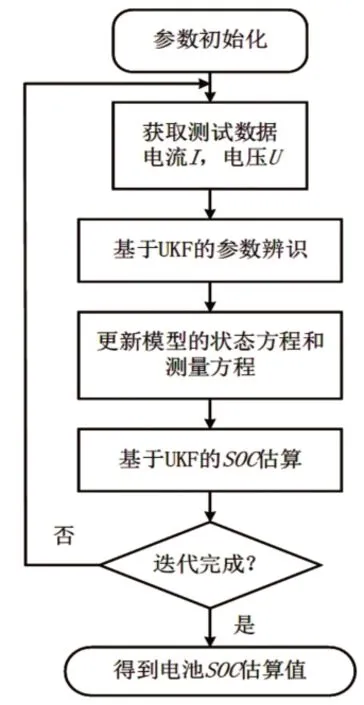
图4 基于双UKF的联合估算流程图
通过恒流放电工况测试、DST 和不同初始值时的鲁棒性测试,验证联合算法的准确性和稳定性。
在恒流放电工况下,通过端电压的测试值与估算值的对比,验证基于RLS 与UKF 两种方法进行参数辨识的准确性。图5 为恒流放电测试时端电压估算结果,图6 为恒流放电测试时基于双UKF 的SOC估算结果。
由图5 可知,由于恒流工况下放电电流没突变的影响,端电压的估算误差很小。其中基于RLS 的端电压估算的平均绝对误差为0.021%,均方根误差为0.049%,基于UKF 的端电压估算的平均绝对误差为0.02%,均方根误差为0.037%。由图6 可知,基于双UKF 的SOC估算值与测试值接近,其SOC估算的平均绝对误差为0.42%,均方根误差为0.58%。
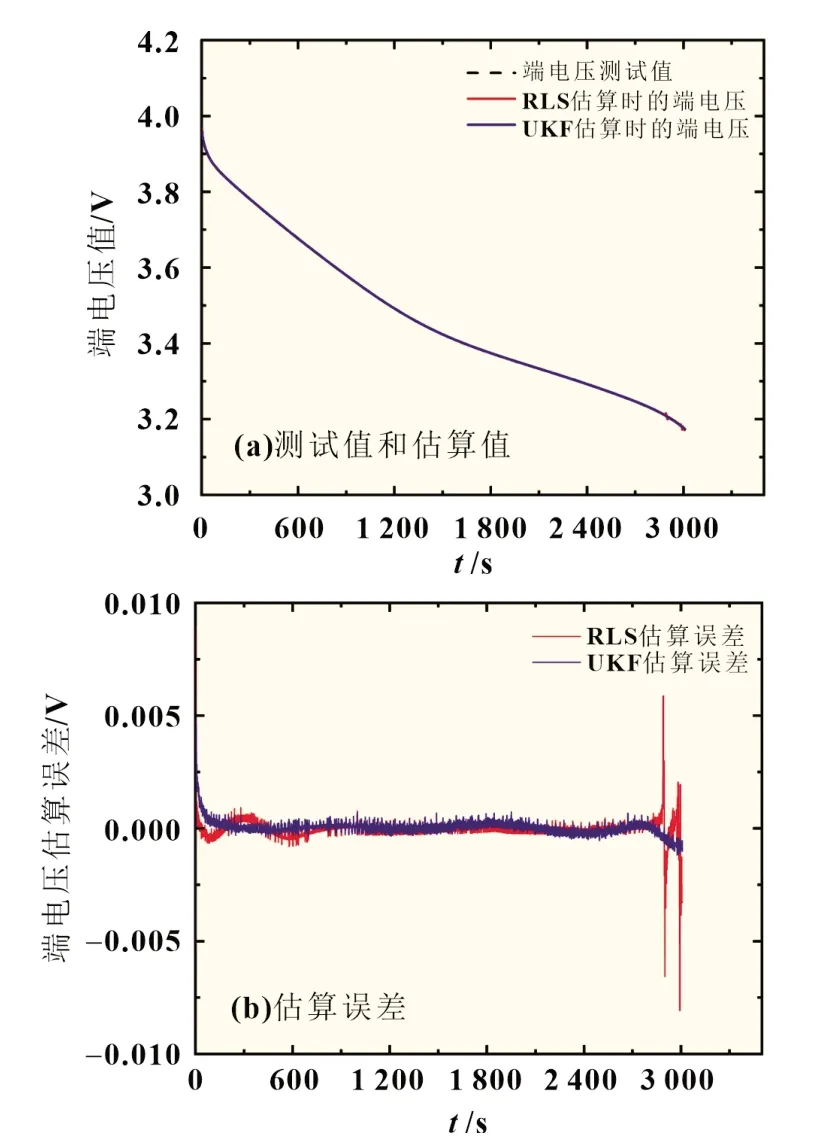
图5 恒流工况下端电压估算结果

图6 恒流工况下基于双UKF的SOC估算结果
电池在实际应用中放电电流一般不是恒定值,因此在DST 测试中通过端电压估算值进一步对比两种方法的参数辨识精度。图7 为DST 工况下端电压估算结果。图8 为DST工况下基于双UKF 的SOC估算结果。
由图7 可知,在DST 工况测试中,端电压的估算值也能很好的跟随测试值。其中基于RLS 的端电压估算的平均绝对误差为0.1%,均方根误差为0.25%,基于UKF 的端电压估算的平均绝对误差为0.025%,均方根误差为0.063%。由图8 可知,在DST 工况测试中,由于在一个放电周期内电流变化不剧烈,SOC的估算误差大部分在2%以内,但在电流放电周期的交界处电流存在很大跳变,这时,SOC的估算误差较大,最大误差达到了3%,其SOC估算的平均绝对误差为0.71%,均方根误差为0.86%。

图7 DST工况下端电压估算值

图8 DST工况下基于双UKF的SOC估算值
为了验证联合估算算法的收敛能力,在DST 工况测试中将SOC的初始值分别设置为90%、80%、70%,估算结果如图9所示,从整个过程上来看,联合算法的估算结果能快速收敛到测试值附近,但从估算的前100 s 可以明显看出,初始值越接近测试值,收敛速度也越快,具有很快的收敛能力,验证了该联合估算算法具有较好的鲁棒性。
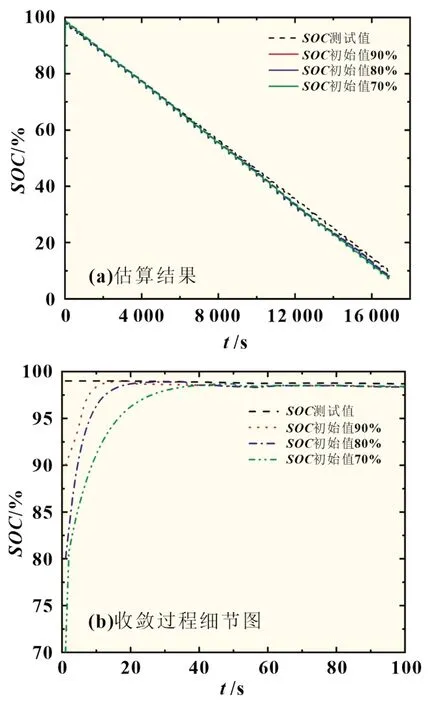
图9 联合算法的收敛能力测试结果
4 结论
本文针对二阶RC 等效电路模型,提出了基于双UKF 的在线参数辨识和SOC联合估算算法。通过恒流放电和DST两种工况实验证明了该联合算法在不同放电电流下对SOC的估算有较高精度,通过设置了不同SOC初始值的鲁棒性测试,验证了该联合算法具有较强的收敛能力。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21
今日农业(2022年14期)2022-09-15
军事文摘(2022年14期)2022-08-26
科学大众(2021年21期)2022-01-18
小学科学(学生版)(2021年12期)2021-12-31
飞天(2019年6期)2019-07-08
水电站机电技术(2017年9期)2017-09-26
自动化学报(2017年2期)2017-04-04
电源技术(2016年12期)2017-01-10
微特电机(2016年3期)2016-11-29
