基于相依网络和SVM的管制系统运行态势评估
2021-05-06 09:32聂党民温祥西王泽坤杨诚修
系统工程与电子技术 2021年5期
李 昂, 聂党民, 温祥西,*, 王泽坤, 杨诚修
(1. 空军工程大学空管领航学院, 陕西 西安 710051; 2. 国家空管防相撞技术重点实验室,陕西 西安 710051; 3. 中国人民解放军32211部队, 陕西 榆林 719006)
0 引 言
随着民航业快速发展,空中交通流量日益增加,为了提高空域资源的利用率,基于航迹运行(trajectory based opera-tion, TBO)的自由飞行技术是我国和一些欧美国家未来发展的趋势[1]。在这种模式下,飞行员将不再需要按照划分好的高度层飞行,但会使空中交通的随机性以及复杂性大大增加,给空管工作带来较大的压力和较多的安全隐患。对管制系统的运行态势进行评估,能够帮助管制人员准确掌握系统的运行情况,并为管制员的指挥决策等提供参考。如何准确客观的评估管制系统的运行态势成为业界研究的热点,也是本文需要解决的核心问题。
态势感知一词最早来源于航天飞行的人因研究[2],是对能够引起系统运行态势发生变化的要素进行获取、理解、评估、显示的一种方法,相较于传统的监测评估手段,态势感知最大的优势在于其昊有宏观性、全面性、动态性和预见性。这里引入态势感知这一思想,从多个角度理解管制系统的运行情况。目前,关于航空管制运行的态势评估研究工作比较少,主要集中于对空中交通情况的评估:Zhang等[3]建立时延评估模型来评估空中交通网络的时延程度;Xiao等[4]提出了一种利用计算智能进行综合分类的空中交通复杂性评估模型;Skorupski等[5]提出了一种模糊风险矩阵,使用连续的数字标度来评估风险;Qiu等[6]提出了一种新的概率流边界来评估空中交通流边界的鲁棒性;Kang等[7]使用SBT航空公司的计量经济模型评估了机场地面的运营情况对空中交通运行的影响;Bronsvoort等[8]提出了一种分阶段的飞行效率评估方法;Tian等[9]提出了一个空中交通流量走廊,用来评估分布式自分离程序。一些学者将复杂网络理论应用到空域复杂性的评估之中,例如Piroddi等[10]通过复杂网络方法提出了一种长期评估空中交通复杂性的方法;Lee等[11]通过构建复杂性图分析空域的复杂性。这些研究忽略了其他管制要素的工作情况。
空中交通管理由许多子系统构成:空域管理、空中交通服务和空中交通流量管理等,共同为飞行员提供各类服务与保障。而在地面的众多保障人员中,只有管制员会与飞行员进行直接沟通,有些关键信息也只能通过管制员向飞行员传递,因此管制员和航空器是管制系统中最基础、最关键的组成部分。本文在分析管制系统时对其进行了简化,主要考虑管制员和空中航空器之间的关系,以它们的运行情况来代表整个管制系统的运行情况。在前期工作[12]的基础上,使用相依网络理论[13-18]对管制系统进行分析,从而评估管制系统的运行态势。
而对于评估问题而言,还有一个重要的问题就是评估方法,目前各领域都有其相应的评估方法[19-25],种类繁多,但这些方法需要进行具有较强主观性的权重确定步骤,难以得到客观的结论,为避免权重选取的过程,本文准备使用支持向量机[26-32]作为评估方法,以管制-飞行状态相依网络模型作为研究对象,对管制系统的运行态势进行评估,并划分运行态势等级。
1 相依网络模型
本文对之前建立的相依网络模型中飞行状态网络的层内边权进行完善。在之前建立的模型中,飞行状态网络的层内边权只和航空器间的距离有关,而在实际中,两航空器间的相对速度也是评判其冲突情况的重要因素,所以本文在飞行状态网络的层内边权设置中加入了相对速度这一影响因素,使用迫近效应理论计算得到飞行状态网络的层内边权,而管制网络的层内连边以及相依边权重的计算方式与文献[12]保持一致。
航空器对的迫近效应是指航空器对的汇聚/非汇聚态势对于管制难度的影响,而航空器位置、速度属性是分析这种影响的最基本要素[33]。飞行态势如图1所示,其中,航空器的位置和速度分别用P和V来表示,相对距离和相对速度分别用Dij和Vij来表示。两机相对位置如图2所示。

图1 飞行态势

图2 两机相对位置
如图1所示,两机间的相对距离为
Dij=Pi-Pj=(xi-xj,yi-yj)
(1)
(2)
相对速度可以表示为
Vij=Vi-Vj
(3)
令Vij=(Δvx,Δvy),有
(4)
(5)

(6)
由式(6)可看出,当VijDij>0时两机呈现发散态势,当VijDij<0时两机呈现汇聚态势。
飞行状态网络的层内边权设置同时考虑相对距离和相对速度,距离越近权重越大,迫近率越大权重越大。而且航空器速度一般不会高于1 000 km/h,即迫近率最小为-2 000 km/h,为避免边权取值为负,加入了控制参数,层内边权ωij为
(7)
式中,52 km为两架航空器之间构成连边的临界距离。
2 管制系统运行态势评估
在机场区域,随着航空器数量变化,管制系统的运行态势也会随之改变。本文在相依网络模型的基础上,采用网络指标描述运行态势,使用支持向量机(support vector machine, SVM)分类模型对管制系统不同情况下的运行态势进行划分。
2.1 态势评估指标选取
为了全面理解管制系统的运行态势,从不同角度选择评估指标。
单个节点的度的概念已在文献[12]中详细叙述,平均节点度则是所有节点的度的平均值,其数值可以反映管制系统中平均每架航空器周围与其存在冲突的航空器数量以及每位管制员需要监视的航空器数量,即
(8)
式中,N为总节点数;ki为单个节点度。
单个节点的点强的概念已在文献[12]中进行了详细叙述,平均点强则是所有节点点强的平均值,其数值可以反映管制系统中飞行员和管制员承受的平均压力,表示为
(9)
式中,aij表示两节点的连接关系,若相连,则aij=1,否则aij=0;ωij表示节点i与节点j之间的边权。
单个节点的加权聚类系数的概念已在文献[12]中进行了详细叙述,平均加权聚类系数则是所有节点加权聚类系数的平均值,其数值可以反映管制系统中航空器的聚集程度,即
(10)
(4) 网络效率NE
任意两个节点间的效率表示为两个节点之间距离的倒数,而整个网络的效率为任意两个节点间效率的平均值,表示网络中任意一点联系到另一点需要的平均中转次数,其数值可以反映管制系统中管制员对空中航空器的整体管控力度,即
(11)
式中,dij为节点i和节点j间的最短路径。
(5) 网络密度ND
网络密度是网络中实际存在的边数与可容纳的边数上限的比值,在此处边数为层内连边与层间连边之和,其数值可以反映管制系统的饱和程度,即
(12)
式中,L为网络中实际存在的连边数。
这5项指标具有一定的相关性,即指标数值越大,网络的复杂程度越高,管制系统的运行态势越差,并且每项指标都从不同的角度反映了相依网络的某一整体性能。因此,本文选取的5项指标可以有效体现相依网络的整体性能。
2.2 SVM评估原理
对于管制系统而言,运行态势好和运行态势差是比较容易判断的,难以判断的是运行态势顺畅程度下降的情况,因而本文引入支持向量机这一方法,来对运行态势下降的程度进行判断。
SVM本质上是一个二分类的分类器,经过训练,可以得到两个分类边界(H1,H2)和一个最优分类面(H)。如图3所示,分类边界H1以外的样本点代表正类样本,分类边界H2以外的样本点代表负类样本,它们之间的点为以一定概率属于正负类的样本;w为最优分类超平面所代表的法向量,决定了超平面的方向;b为位移项,决定了超平面与原点之间的距离。

图3 SVM分类原理
若对运行顺畅的样本和运行阻滞的样本进行SVM分类训练,则可以得到运行顺畅样本的分类边界、最优分类面和运行阻滞样本的分类边界。管制系统的运行态势反映的是当前系统状态与期望的顺畅状态相比,其顺畅度的偏差程度,可以通过样本点到运行顺畅样本的分类边界的距离表示运行顺畅度上升或下降的程度,这样,就可以将系统运行态势评估问题转化为一个分类问题。同时,根据SVM分类的结果,当样本点在运行顺畅样本边界和最优分类面之间时,样本的运行态势等级为中(运行态势下降但仍较好);当样本点在最优分类面和运行阻滞样本边界之间时,样本的运行态势等级为低(运行态势已经较严峻),这样就将管制系统的运行态势等级分为高、中、低和差4个状态。
以二维空间为例,超平面表示为
g(x)=wx+b
(13)
平行直线H1,H2表示为
(14)
二维空间中,二者间的距离为
(15)
可推出
(16)
约束条件设置为超平面可将网络完全分类:
(17)
根据SVM的原理,任意样本点xi到最优分类面距离d为
d=wTxi+b
(18)
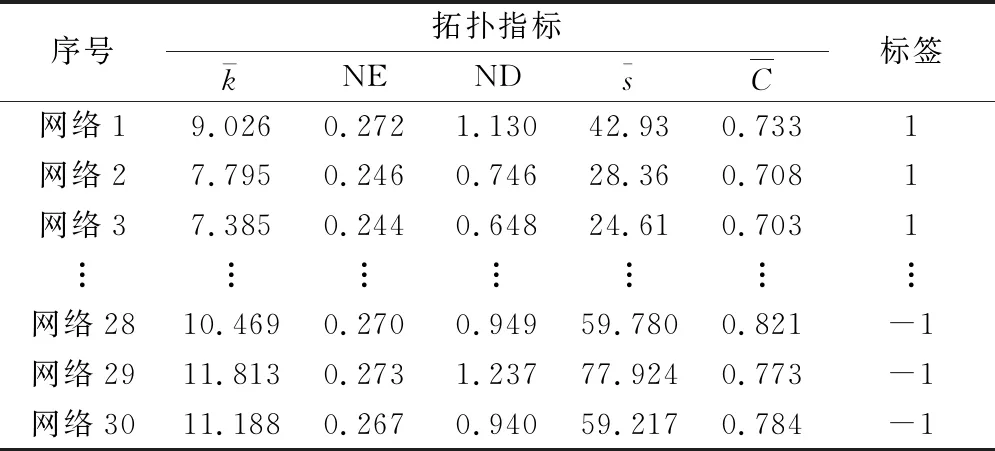
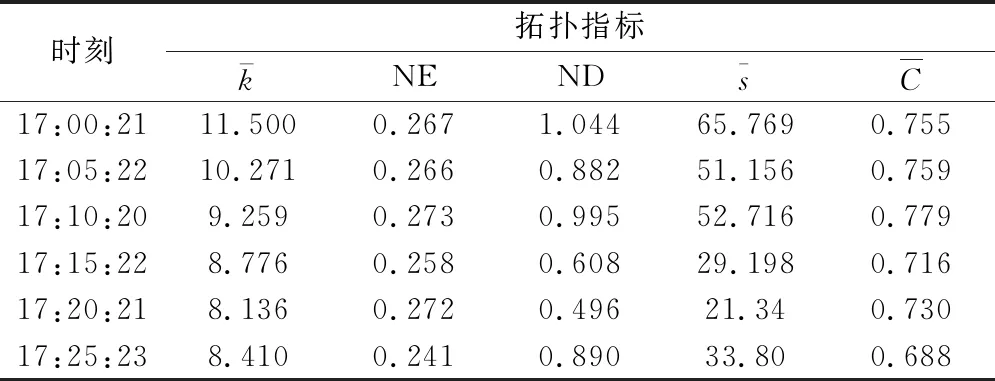
最优分类面与运行顺畅样本的分类边界是平行且间隔为1,因此,可以将样本点到最优分类面的距离转化为样本点到运行顺畅分类边界的距离。若d>1,则说明此时管制系统处于顺畅运行的状态,运行情况很好,其到顺畅运行边界的距离为m=1-d<0;若0 表1 评估标准 基于SVM分类模型的管制系统运行态势评估流程如图4所示。 图4 评估流程图 SVM运行态势评估的主要步骤如下: 步骤 1分别收集管制系统运行态势好和运行态势差的数据作为历史数据,分别构建相依网络模型; 步骤 2计算不同状态下相依网络的各项指标,将历史数据和计算得到的各项指标作为训练集; 步骤 3通过SVM训练得到评估模型; 步骤 4依据当前空地整体态势构建当前的相依网络,计算当前网络的各个指标值,输入到评估模型中去,计算得到当前样本点到运行顺畅分类边界的距离,对比表1得出当前管制系统运行态势等级的评估结果和管制员需要采取的相应措施。 为了验证评估方法的有效性,本文通过Matlab软件模拟空地态势,构建一个300 km×300 km的空域,并为了方便计算,将其划分为9个方形的管制扇区。在一个扇区内,管制员同时指挥的航空器数量一般最多是11架,本文认为平均每个扇区内航空器数量在4架以下时管制系统运行顺畅,8架以上时管制系统运行阻滞,因此,本文以总航空器数量小于36架的20个样本点作为运行顺畅的正类样本,大于72架的20个样本点作为运行阻滞的负类样本,并将这40个正负类样本点共同作为训练集。图5给出了训练集的两类典型情况。 图5 训练集典型示意图 表2 拓扑指标及标签设置 在这30组数据中,本文选出3个具有代表性的样本来具体分析。当航空器数量较少(网络7)以及航空器数量较多(网络26)时,这两类情况下航空器的分布如图6和图7所示。 图6 有较少航空器时的示意图 图7 有较多航空器时的示意图 分别计算这两类情况的网络指标并输入第2节中的评估模型,得到m值的大小分别为-7.01和2.08,运行态势等级分别为高和差。 但在现实中,经常会出现航空器分布较为密集的情况,本文将航空器数量较少但分布密集的情况(网络3)也进行了模拟,以检测该评估模型的泛化性。 经计算,该情况下运行态势评估值为0.21,评估等级为中。虽然图8这种情况下航空器的数量较少,与图6所示情况相同,均为30架,但评估等级却较低,这是因为图8的航空器分布更加密集,如6号、7号、8号3架航空器的距离很近,且其所在扇区有8架航空器。 图8 航空器少但分布密集时的示意图 将这30组网络拓扑指标输入评估模型中,计算得到评估值以及每组网络的运行态势等级如表3所示。 表3 仿真评估结果 续表3 在空管运行中,以昆明长水机场某日的飞行数据为样本,在周围选取合适的空域,对17:00-17:25时段的管制系统运行态势进行评估。以5 min为间隔经过数据处理后,对每一时刻的管制系统进行相依网络建模,如图9所示,黑线实线代表扇区边界,黑色虚线代表进近管制区域边界,蓝色实心方块代表航空器,红色实心圆代表长水机场。 图9 管制系统的运行态势 从图9可以看出,在25 min内,管制系统的运行态势从整体上看在朝好的方向发展,本文在该场景下验证了所提出方法的有效性与可行性。运用第2节中提出的方法对这6个相依网络的拓扑指标进行计算,得到结果如表4所示。 表4 实际样本拓扑指标 将实际数据代入评估模型中,得到评估结果如表5所示。 在进行对比之后发现评估值由大到小排序为1>2>3>4>6>5,而从图9中也能直观地看出管制系统的运行态势排序为:1>2>3>4>6>5,表明由该方法计算得到的评估结果与实际情况相符合,因此,本文提出的方法适用于管制系统的运行态势评估,且能得出较为准确的结果。 表5 实例评估结果 本文对管制系统的运行态势进行了评估,主要创新点如下: (1) 用管制系统中最关键的管制员和航空器这两个部分组成的系统来代表管制系统,并在原有模型的基础上引入了迫近效应的概念,加入了航空器间相对速度的影响,使得模型更加接近现实; (2) 以相依网络的拓扑指标来评估管制系统的运行态势; (3) 针对管制系统运行态势评估中存在的主观因素影响较大的问题,本文采用SVM评估方法将运行态势评估问题转化为分类问题,避免了各个参数权重的选取问题,有效降低了主观因素的影响。 以样本点到运行顺畅分类边界的偏差程度作为唯一的评价参数评估管制系统的运行态势,根据SVM得到的分类面将管制系统运行态势等级分为高、中、低、差共4类,分类清晰,并得到具体的评估值,帮助管制员明确后期的主要工作。通过仿真验证以及实例验证均表明了所提出方法的有效性与可行性,为实现空管自动化提供了新的思路。
2.3 评估流程

3 仿真分析
3.1 场景设置

3.2 模型验证






4 实际应用


5 结 论
猜你喜欢
音乐教育与创作(2020年1期)2020-05-13
音乐天地(音乐创作版)(2020年2期)2020-04-18
新商务周刊(2018年15期)2018-12-06
航空知识(2017年2期)2017-03-17
西南石油大学学报(社会科学版)(2016年1期)2016-12-01
特别文摘(2016年18期)2016-09-26
特别文摘(2016年15期)2016-08-15
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
工业设计(2016年6期)2016-04-17