基于FFT谱能量检测和互相关检测的快速频谱感知方法及其性能分析
2021-05-06 09:32赵小强石海杰
系统工程与电子技术 2021年5期
常 虹, 赵小强, 石海杰
(1. 西安邮电大学通信与信息工程学院, 陕西 西安 710121; 2. 西北工业大学电子信息学院, 陕西 西安 710129)
0 引 言
无人机通信可以解决特殊环境下的应急通信问题,利用无人机空中自组织网络可以为地面用户提供无线覆盖,但是多跳传输会造成无人机网络容量不足的问题,利用频谱共享机制可以缓解频谱紧张的问题[1-2]。目前的认知无线电主要利用授权信号的空时频空洞机会,利用常见的空域、频域、时域的频谱感知方法发现闲置频谱,供无人机使用[3-4]。无人机的工作频率范围是0.84~2.4 GHz,与地面蜂窝基站工作频率和民用卫星通信频率重叠,因此无人机可以共享地面蜂窝网频谱[5-6]。由于无人机飞行高度可达1 km,在搭载雷达或者装载频谱检测设备时可实现在大视野范围内频谱感知,受地形影响较小,而且运动中的无人机需要快速切换于地面基站频率之间以适应地面基站分布密集的现状[7-8],因此研究适用于无人机的快速频谱感知算法非常有必要。
目前频谱感知方法包括能量法、射频指纹识别、匹配滤波、特征值检测、循环平稳特征检测等[9-10]。能量法:利用接收信号的平均能量进行检测,具有简单快速的优点和易受环境变化引起的噪声不确定性影响的缺点,适合在通信环境良好时使用[11-12];指纹识别:需要建立并更新主用户射频指纹库,利用神经网络算法进行识别,具有识别精度高、运算复杂的特点,适用于线下检测[13];匹配滤波:基于主用户(primary user,PU)先验信息设计滤波器,检测效果好,同步性要求高,实现难度大[14];特征值检测:根据随机矩阵理论,利用信号协方差矩阵特征值极限分布情况进行主用户信号检测,具有感知能力强的优点,但是协方差矩阵估计误差将影响感知性能[15-16]。
考虑到无人机能量有限[17],选择计算量小、能耗低的频谱感知算法。本文利用无人机的空间移动性,提出了针对窄带信号的频谱感知算法。首先根据PU信号传输范围的先验信息,限定无人机的有效感知范围,然后利用FFT频谱能量作为检测量进行门限检测,当检测量小于门限时,利用无人机不同飞行位置接收信号的相关性进行二次检测,构造相邻空间信号的互相关函数作为检测量,并融合前向相关检测和后向相关检测,得到本地检测结果,最后给出所提算法检测概率、虚警概率和门限的解析表达式。该算法充分利用了频域非相关累积对噪声的抑制和不同空间传输增益的差异解决遮挡效应的问题,有效提高频谱感知的可靠性,分析对比和仿真结果表明,所提算法具有较高的检测性能。
1 数学模型
图1为无人机频谱感知场景,假设PU信号频率为f,PU信号有效传输范围内有Q个无人机,每个无人机配有频谱检测设备,每个无人机的每个空域测量单元内只存在一个PU信号。

图1 无人机频谱感知场景
假设某无人机在飞行位置i处接收的信号用yi(n)表示,考虑到在信号接收过程中可能存在PU信号状态变化,在主用户不存在H0条件下,有
(1)

(2)
在n=J+1时PU信号出现。将接收信号yi(n)分成L段,每段长度为M点,有M≤N,对每段接收信号进行M点快速傅里叶变换(fastFouriertransform,FFT),则频谱密度为
(3)

(4)

(5)
并与判决门限λ0比较,给出本地判决结果,检验统计量Y(i)的虚警概率表示为
(6)
由此确定检测门限为
(7)
检验统计量Y(i)的检测概率表示为
Pd0=Pr(Y(i)>λ0|H1)=
(8)
由此得到无人机在位置i时的一次检测判决式为
(9)
2 基于频谱能量和互相关函数的二次检测算法


图2 二次检测原理
假设第i检测窗内存在PU信号由1变0的状态变化,变化时刻为J+1(J∈[0,N-2])PU信号状态变化服从泊松分布,如果平均发生次数为λα,那么PU信号状态变化发生概率即为1-e-λα[22-24],则前向互相关函数可表示为
由于J是随机变量,N0表示相邻两个空域位置i和i-1的起始采样时差,平均前向互相关函数表示为
(10)


(11)
式中,
H1情况下,由于
则
(12)


H0情况下,
Pd0→1≈
(13)

由此得到无人机在位置i时的二次检测判决式:
(14)
本文所提算法的检测步骤如下。
步骤1计算第i检测窗内信号的平均频谱能量Y(i)并进行门限检测,若Y(i)>λ1,检测结果为存在PU信号,检测结束;否则转入步骤2。



最后将平均频谱能量检测结果和互相关检测结果进行融合,作为无人机在位置i处的最终检测结果,二次检测概率表示为
(1-Pr(Y(i)>λ0|H1, 0≤ri≤Rp))·
(Pd1→0+(1-Pd1→0)Pd0→1)
(15)
3 实验仿真和性能比较
在仿真中,假设PU信号有限辐射范围Rp=10km,无人机分布概率为β=2/km2。
仿真1首先对不考虑PU信号随机出现情况下的二次检测算法分别进行Matlab仿真,包括频域检测(frequencydomaindetection,FD)法和互相关检测(correlationdetection,CD)法两部分,并与传统的时域能量检测(energydetection,ED)法,时域连续ED(timeconsecutiveeventED,TEED)法[15],特征值ED(eigenvaluesED,EED)法进行性能对比。无人机在检测窗i内的信号采样点数N=256,频域非相关累计点数M=32,分段数L=4,当Pfa=0.01时,以上检测算法的Pd随信噪比(signaltonoiseratio,SNR)变化关系如图3所示。

图3 检测概率与SNR关系

仿真2分析采用不同检测门限λ1(或λ2)时,PU信号状态变化率λα(或λβ)及空间传输增益hi对随机出现信号的互相关检测(correlationdetectionwithrandomarrivals,CDRA)算法检测性能的影响。当Pfa=0.1,N=256,λα=λβ=0.2,hi-1=10dB,hi=0dB时,CDRA算法检测概率随SNR的变化如图4和图5所示。
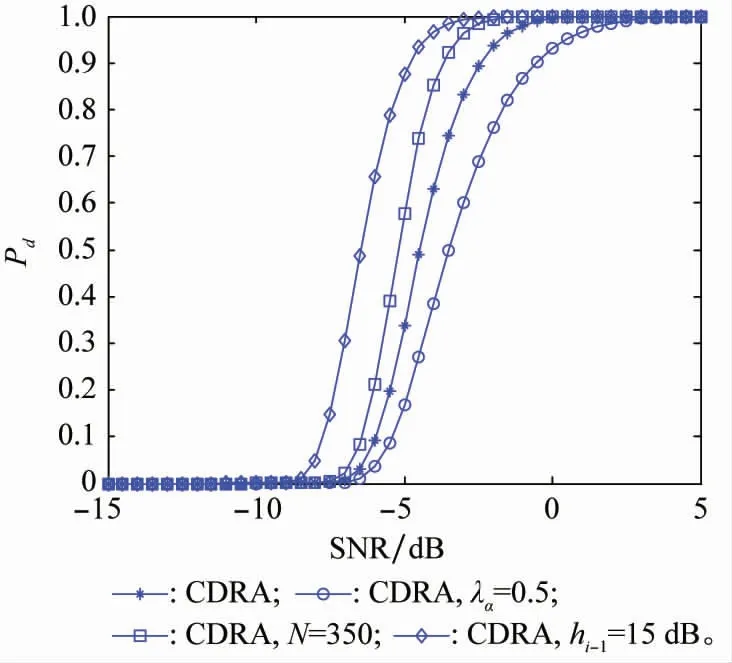
图4 检测门限为λ1时,不同λβ,N,hi对应的CDRA检测性能比较

图5 检测门限为λ2时,不同λβ,N,hi对应的CDRA检测概率
当检测门限取λ1时,表明在i-1和i检测窗内接收的PU信号状态分别为忙及从忙到闲的状态转变,由图4可以看出,λα增大时,PU信号状态变化率的增加引起检测率下降,原因是PU信号的前期状态是忙,状态变化率越高,检测率是越低的。当检测门限取λ2时,表明在i和i+1检测窗内接收的PU信号状态分别为从闲到忙的状态转变和忙状态,由图5可以看出,λβ增大时,PU信号状态变化率的增加引起检测率增大,原因是PU信号的后期状态是忙,状态变化率越高,检测率越高,同时观察两图可知,相关点数N的增加和信道增益hi的增加都有助于提高检测概率。
仿真3在PU信号随机出现情况下,若利用TEED算法中PU信号占空比表示第i检测窗内可能的PU信号状态转换率,并与互相关CD检测算法结合,分析不同参数N、B和T对CD算法性能的影响。如图6所示,λβ=0.2,Pfa=0.1,N=256,B=2×103,T=104时,CD算法检测概率随SNR的变化;当T=15×104时,CD算法性能基本不变,表明PU信号发射周期不会对CD算法性能产生影响,当B=2.5×103时,PU信号出现时长增加,CD算法检测率提高,当N=350,SNR<-15dB时,观测窗长越长,CD算法检测率越高,说明互相关检测对降低非相关噪声的影响发挥主要作用,但当SNR>-15dB时,随着噪声功率减小,观测窗长越长,检测概率受PU信号的随机出现的影响越大,检测概率反而是下降的。

图6 不同N,B,T对应的DCD检测性能比较
图7为在不同N,B,T情况下,CD算法检测概率随虚警概率的变化情况,特别注意的是,当Pfa>0.4时,观察放大图可知,随着N值的增加检测概率稍稍下降,因此互相关检测过程中N值需要权衡选择。

图7 不同虚警概率下CD的检测概率


图8 二次检测FD-CDRA算法性能曲线
4 结 论
本文利用无人机空间自由移动性可以克服单用户频谱感知的遮挡效应的特点,提出利用位于主用户有效通信范围内的无人机在某位置接收信号的FFT平均谱能量检测,和空间相邻位置接收信号的相关性检测的二次检测方法,并且将平均谱能量和相关函数作为检测统计量推导出检测性能的解析表达式,并特别分析了PU信号随机出现情况下利用前向、后向相关检测法以提高检测性能,最后通过仿真验证了该方法的有效性和与其他单用户检测方法相比的优越性。
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
汽车实用技术(2022年4期)2022-03-07
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
空间科学学报(2021年6期)2021-03-09
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
火力与指挥控制(2019年4期)2019-06-14
测控技术(2018年7期)2018-12-09
湖湘论坛(2015年3期)2015-12-01