
倾转机翼无人机气动设计与分析
2021-05-10 15:30苏扬徐爽
中小企业管理与科技·上旬刊 2021年3期
苏扬 徐爽

【摘 要】垂直起降固定翼无人机是当下无人机发展的趋势之一。倾转机翼无人机作为其重要的一个分支,在国内外均有一定程度的发展。论文参考NASA倾转机翼无人机GL-10的构型,建立了理论计算结合XFLR5气动估算软件分析的设计方法,并对倾转机翼无人机进行设计和分析,证明了该设计方法的可行性。
【Abstract】Vertical take-off and landing fixed-wing UAV is one of the current development trends of unmanned aerial vehicles (UAVs). As an important branch of UAVs, tilt wing UAVs have been developed to a certain extent at home and abroad. In this paper, referring to the configuration of NASA tilt wing UAV GL-10, a design method combining theoretical calculation and XFLR5 aerodynamic estimation software analysis was established, and the design and analysis of the tilt wing UAV proved the feasibility of the design method.
【关键词】倾转机翼;理论计算;气动估算;XFLR5
【Keywords】tilt wing; theoretical calculation; aerodynamic estimation; XFLR5
【中图分类号】V279 【文献标志码】A 【文章编号】1673-1069(2021)03-0177-02
1 引言
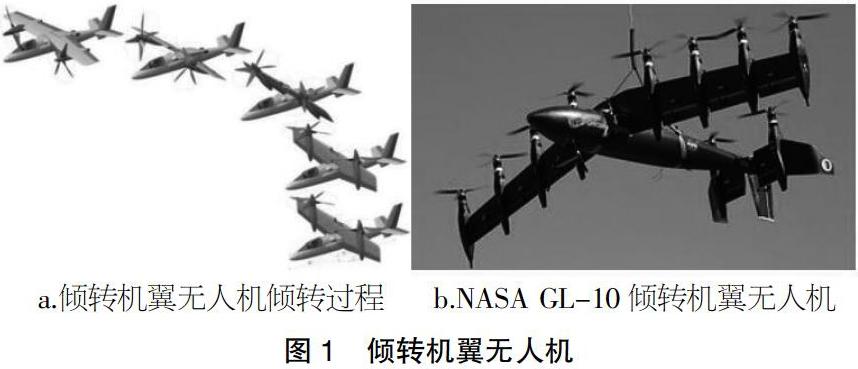
垂直起降固定翼无人机是一种新型的无人机,既具有类似多旋翼的垂直起降能力,又具有固定翼的高速巡航能力,在航拍航测、电力巡线、森林灭火等领域均有广泛应用。倾转机翼无人机是一种特殊的垂直起降固定翼无人机,其能够同时倾转机翼和安装在机翼上的动力装置。2014年,NASA研制了一款新型电动倾转机翼无人机GL-10,完成了首飞试验并进行了不断的测试改进,研究人员称其效率能够达到普通直升机的4倍。本文以GL-10的构型为基础,设计一款采用分布式推进方式倾转机翼无人机。
2 无人机气动设计
2.1 机翼设计
①翼载荷。一般来说,要求机动性好、起飞着陆速度小的飞机,采用小的翼载荷,本项目计划设计的无人机为一款低速无人机重量W=7kg,巡航飞行速度为V=16.5m/s,因此翼载荷应选取小值。经统计重量在10kg以内、巡航速度小于20m/s的多款小型无人机的设计参数,取其翼载荷为11kg/m2。
③翼展。翼展为机翼的总长度,考虑机翼拆装及转场装箱方便,初定无人机翼展为L=2.2m。
⑥机翼根梢比。机翼根梢比为翼根弦长和翼梢弦长的比值,一个合适的根梢比能够有效地提高机翼的重量效率[1],本文选择根梢比为1.3的梯形机翼。
⑦后掠角。此型无人机由于需要兼顾垂飞和平飞两种飞行状态,需要设置较小的后掠角匹配垂飞和平飞时的重心及压力中心的关系,设计一个小的后掠角11°。
⑧安装角。安装角指机翼安装在机身上时翼根剖面弦线与机身轴线之间的夹角主要由巡航状态的升力系数决定,设计一个小的安装角1°。
⑨机翼翼型。由于本文设计无人机属于小型低空低速无人机,以低速情况下升阻比大为选取标准。根据经验,选择翼型为FX 63-137为机翼翼型。
⑩机翼动力装置布置。为了分散结构受力,减小螺旋桨尺寸,机翼前缘电机采用分布式推进方式,4台机翼电机分别位于两侧机翼展向的1/3处和2/3处,最大推力为2.5kg,机翼电机和尾翼电机的推力比为2∶1。
2.2 尾翼设计
①平尾面积。根据设计经验,平尾面积应为机翼面积的20%~25%,考虑到尾翼两端布置电机,尾翼需要一定的强度刚度,且螺旋桨的尾流会影响平尾效率,故平尾面积取25%的机翼面积,即为0.1575m2。
②垂尾面积。根据设计经验,垂尾面积应为机翼面积的10%左右,即为0.063m2。
③尾翼翼型。尾翼为了满足安定面需求和达到最佳的操纵效果,尾翼需采用对称翼型NACA0010。
④尾力臂。按照双发通用飞机的参考尾容量(平尾0.8,垂尾0.04)来设计尾力臂。
⑤尾翼动力装置布置。两台尾翼电机位于尾翼翼梢,最大推力为1.25kg。和机翼类似,平尾和垂尾均采用合适根梢比和中等展弦比的梯形尾翼设计。
3 无人机气动分析
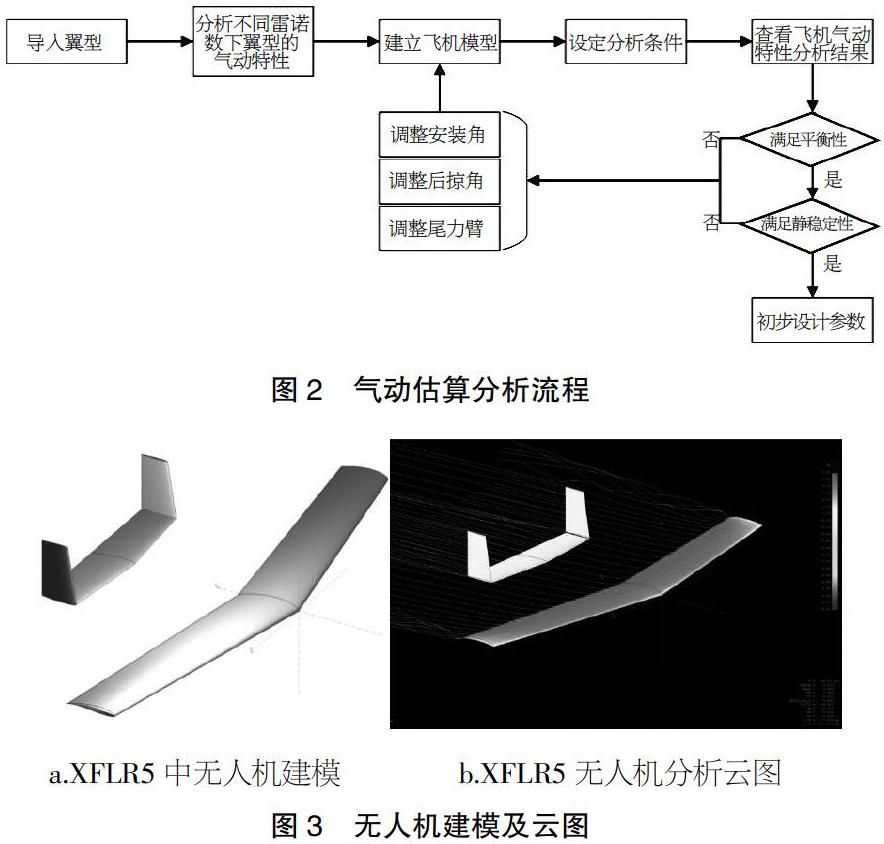
本文基于XFLR5软件进行初步气动估算,XFLR5是在Xfoil翼型分析软件的基础上编写的,用于低雷诺数下的翼型、机翼、小型飞机的气动分析软件。Xfoil用来设计和分析亚音速翼型,在工程和科研工作中均有广泛的应用。无人机气动分析的步骤如图2所示。
平飞模式下,观察图4a中所展示的是无人机在迎角-10°至10°范围内的升力变化曲线,可以发现在迎角为0°时,整机升力等于重力为70N,整机保持升力重力平衡。图4b中展示的是无人机在迎角-10°至10°范围内的纵向力矩系数变化曲线,可以发现在迎角为0°时,纵向力矩系数约为0,即无人机在纵向保持力矩稳定。垂飞模式下,无人机6台电机最大能够提供14kg的升力,远大于设计最大起飞重量7kg,故垂飞模式下也可以处于平衡状态。
纵向位置以翼根前缘为坐标原点,即翼根前缘X=0。多旋翼无人机的稳定性主要在于各旋翼提供的拉力对重心取矩為0。该无人机垂飞状态的设计重心在X_CG1=0.239m。
无人机在平飞模式时与固定翼飞机无异,其静稳定性的主要判据在于俯仰稳定度。根据俯仰稳定度近似计算公式,对无人机的俯仰稳定度进行计算:
其中,气动中心和焦点均通过XFLR5软件估算而来,重心在无人机机身纵向和全机压力中心重合,而焦点可以通过XFLR5软件间接算得。飞机焦点的特征在于,在一定雷诺数下,当飞机的迎角改变时,其所受到的空气动力对于此点的合力矩不变。根据这一特征,XFLR5软件可以通过设定不同的无人机重心位置来计算相对不同位置的点取矩的俯仰力矩系数-迎角曲线,当对于某点的俯仰力矩系数-迎角曲线近似为一条直线时,即所受到的空气动力对于此点的合力矩不变,则可认为该点为无人机的焦点。
通过上述总体分析计算可得纵向稳定度为-0.171,固定翼无人机的俯仰稳定度一般为-0.2~-0.15,无人机处于合理的俯仰稳定度区间,所以该无人机平飞时纵向是稳定的。
4 结论
本文建立了理论计算结合XFLR5气动估算软件分析的设计方法,并对倾转机翼无人机进行设计和分析,证明了该设计方法的可行性,为类似构型的无人机气动设计提供了参考。
【参考文献】
【1】西蒙斯.模型飞机空气动力学[M].北京:航空工业出版社,2007.
