基于时频图像GLCM-HOG特征的往复压缩机故障诊断
2021-05-14 09:39茆志伟张进杰江志农黄翼飞
科学技术与工程 2021年10期
李 辉, 茆志伟*, 张进杰, 江志农, 黄翼飞
(1.北京化工大学高端机械装备健康监控与自愈化北京市重点实验室, 北京 100029;2.压缩机技术国家重点实验室压缩机技术安徽省实验室, 合肥 230031;3.北京博华安创科技有限公司, 北京 101399)
往复压缩机是目前工业领域中最常见的机械之一,广泛应用于冶金、炼油、化工等重要领域,并作为核心设备工作,在工业生产中起着十分重要的作用[1],因此往复压缩机的故障诊断对于工业生产尤为重要。由于设备运行时的振动信号中包含丰富的状态信息,因此被广泛作为故障诊断的重要依据。文献[2]通过提取分析振动信号的特征变化,实现了滚动轴承的故障诊断。文献[3]采用主成分分析的方法处理内燃机缸盖的振动信号,从而实现对气门间隙故障进行监测并判断故障类型。文献[4]基于利用波形和数值分析方法处理振动信号,以实现对铣齿机的故障诊断。
由于往复压缩机结构复杂,工作环境恶劣,众多因素影响导致其工作时产生非平稳信号[5]。往复压缩机内部能量传递较弱,发生故障时振动征兆不明显,给复杂工况下的状态识别带来困难。时频分析方法能综合振动信号的时频域信息,揭示信号的时变特征和能量分布[6-7]。基于时频分析方法的优势,相关学者将该技术应用于故障诊断研究中。文献[8]利用短时傅里叶变换生成的时频谱与深度学习方法相结合,提出一种对于滚动轴承故障识别精度较高的诊断方法;文献[9]在分布的基础上改良了一种谱峭度法,并将其成功应用于提取轴承信息的故障诊断研究上;文献[10]将经验模态分解和Wigner-Ville相结合提取振动信号特征信息,在内燃机的应用上取得了良好的诊断效果。
针对上述情况,提出一种基于时频图像灰度共生矩阵-方向梯度直方图(gray level co-occurrence matrix-histogram of oriented gradient, GLCM-HOG)特征的往复压缩机故障诊断方法。采集往复压缩机的振动信号,通过时频分析处理振动信号生成图像。基于得到的振动时频图像,利用灰度共生矩阵和方向梯度直方图的方法分别提取图像的特征,融合特征后输入支持向量机进行分类,提高了往复压缩机故障诊断的准确率。
1 基于图像的故障诊断原理
设备运行时若出现故障,其振动信号的振幅、方向、频率等会随之发生变化。因此,在往复压缩机的敏感部位安装传感器,对设备的振动信号进行监测分析,通过揭示振动信号的变化规律,来判断设备的健康状态,实现故障预警,如图1所示。
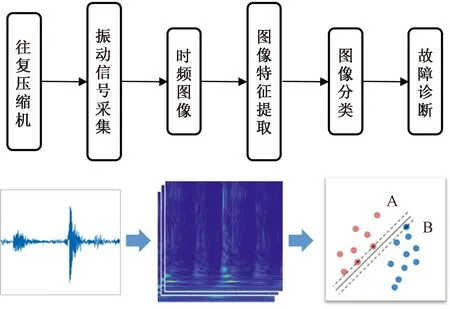
图1 基于时频图像的故障诊断方法流程图
采集得到振动信号,利用时频分析方法能够揭示往复压缩机非平稳信号频率分量的构成,表示出每个分量随时间的变化关系。利用时频分析方法生成图像的典型方法有:短时傅里叶变换、Wigner-Ville分布、小波变换。然而短时傅里叶变换无法对振动信号的时间和频率实现良好的定位,不适合于往复压缩机非平稳信号的分析[11-12]。Wigner-Ville分布时间和频率分辨率较高,但存在交叉项干扰[13],对于本次研究的测试样本信号数据的分析处理而言,经测试Wigner-Ville分布生成图像耗费的时间较长,且得到的图像并没有良好的效果。而小波变换有着良好的时频局部化能力,对样本数据分析得到的图像清晰,特征明显,且生成图像的过程耗费时间较短。基于小波变换的优势,选用小波变换的方法对往复压缩机振动信号进行处理,生成时频图像,如图2所示。
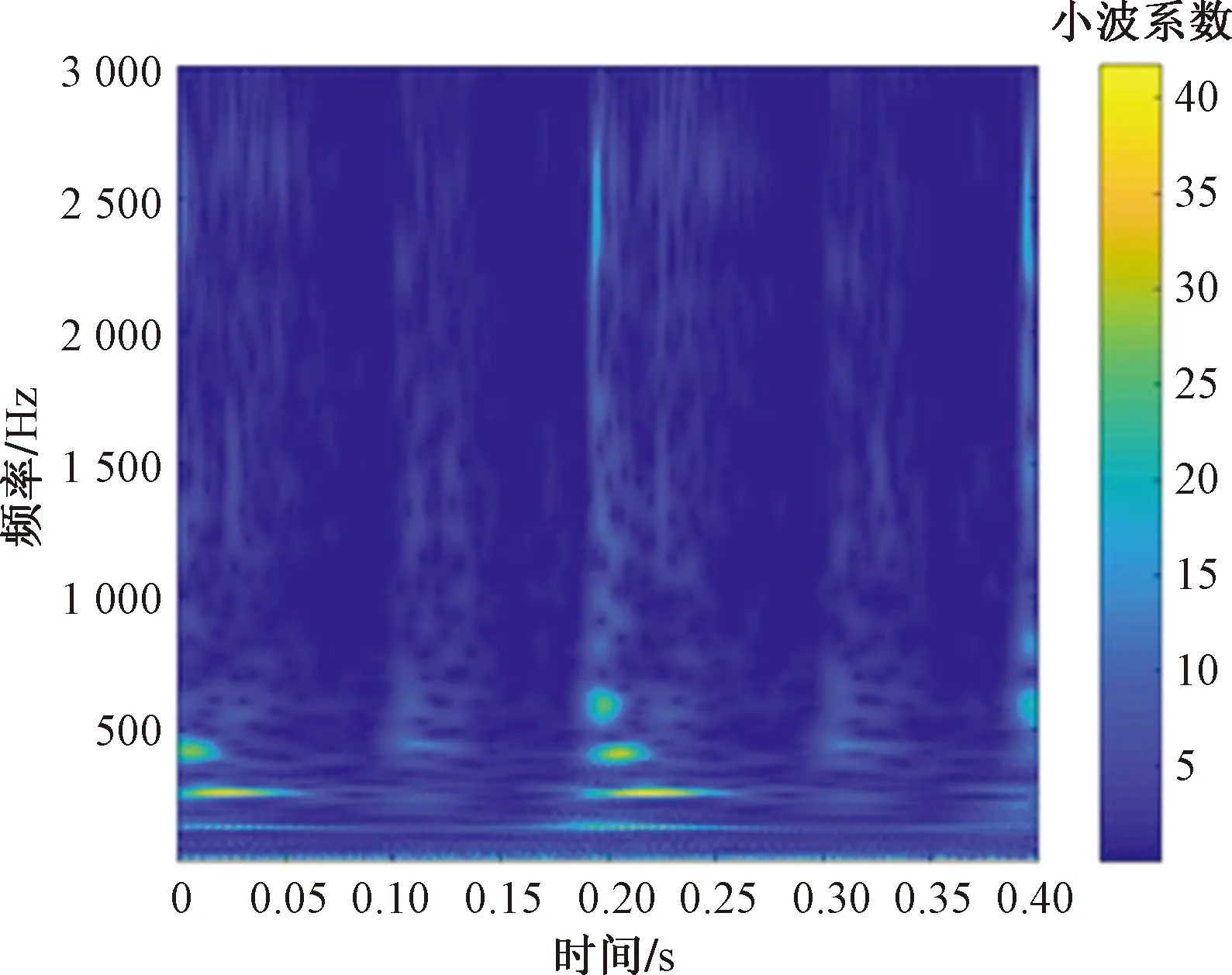
图2 小波变换时频图
时频图像中包含大量能反映振动信号特征的信息。利用时频分析方法进行故障诊断时,主要是通过提取图像中的特征信息,构建能够高度表征图像信息的特征集,输入分类器中以完成时频图像的识别分类,进而判断设备的工作状态实现故障诊断。但时频图像的数据维度较高,存在较多的冗余数据,对特征信息提取存在一定的干扰;并且在不同的工况下,同一特征值的取值范围是不同的,并且相同特征对于不同故障的敏感度也不同。因此,在故障诊断过程中,特征提取方法以及特征种类的选择尤为关键。
2 时频图像特征提取
图像特征提取常用的方法有:基于颜色、基于形状、基于纹理的特征提取方法。颜色特征能够将图像中颜色的整局分布以一定形式简单地表示,但难以描述图像中颜色的局部位置分布和每种颜色对应的位置信息;而对于形状特征参数的提取,必须对图像进行预先的图像处理和分割,但分割会使形状特征参数的准确性受到影响。因此本文采用抗干扰性能较好的纹理特征。纹理是脱离图像颜色而反映图像的同类信息,是以多个像素点在区域中的关系进行计算而得到的统计特征,显示不同区域和结构之间的关联和存在的关系。
2.1 灰度共生矩阵
灰度共生矩阵[14](gray level co-occurrence matrix,GLCM)是一种纹理统计分析法,它以图像中的各像素点间的位置分布关系包含了图像的纹理信息为前提,描述图像矩阵中各像素点之间对应的关系,以此来表示图像的纹理分布特征。假定一图像尺寸为Nx×Ny,即由Nx×Ny个像素点组成,Nx为图像矩阵的列数,Ny为图像矩阵的行数,图像灰度等级表示为G。以X=(1,2,…,Nx)表示水平空间域,Y=(1,2,…,Ny)表示竖直空间域,N={1,2,…,G}为灰度级数域,则图像的灰度共生矩阵可以描述为图像的空间区域向灰度级域的映射即f:X×Y→N。图像矩阵在计算机中以像素点的形式存在,图像的纹理表示图像中不同像素点之间的分布规律,利用上述映射和像素点之间的分布关系可以反映图像的纹理特征,灰度共生矩阵就是来表示这种像素点分布规律的统计方法。
除了上述灰度等级G外,灰度共生矩阵还有两个重要参数:方向θ和步长d。假设在图像矩阵中有一像素点位置为(x,y),将其灰度值设为i,距离该点位置(a,b)一点设为(x+a,y+b),该点灰度值设为j,将这两点看作一组点对,则该点对的灰度值为(i,j)。点对之间的位置差异可看作方向θ与步长d构成。当角度θ、步长d为定值时,使(x,y)遍历整幅图像,会得到不同灰度值组合的点对,若将灰度值设为G,则点对的像素组合最多有G2种。因此,设定一个G×G的方阵,方阵的每个元素坐标(i,j)代表着相应点对灰度值,点对遍历整个图像矩阵,同样的(i,j)出现的次数,就为该坐标下矩阵的数值,即得到灰度共生矩阵[P(i,j,d,θ)]G×G。
灰度共生矩阵的表达式为
P(i,j,d,θ)={[(x,y),(x+a,y+b)|f(x,y)=i;f(x+a,y+b)=j]}
(1)
基于时频图像的灰度共生矩阵,从中提取能代表图像特征信息的二次特征参数,从时频图像的灰度共生矩阵中选用以下几种GLCM特征。
(1)对比度(contrast, CON)。对比度表示了图像的清晰程度,图像越清晰,则对比度越大,纹理沟纹越深。
(2)
(2)相关(correlation, COR)。相关表示了灰度共生矩阵元素在某一方向上的相似度,大小与图像中区域像素值的相关性关联。
(3)
(3)能量(angular second moment, ASM)。能量,也称角二阶矩,表示图像灰度分布的均匀程度以及纹理粗细程度,能量值越大,则纹理分布越细,灰度分布越均匀。
(4)
(4)同质(inverse different moment, IDM)。同质,也称反差分矩阵,表示图像局部区域的纹理差异程度,同质值越大,则不同区域之间的纹理差异越小,规律性越强。
(5)
2.2 方向梯度直方图
方向梯度直方图[15](histogram of oriented gradient, HOG)也是图像局部区域纹理特征提取方法的一种。将图像分解成若干个小的单元,每个单元由若干个像素点组成,采集单元中各像素点的梯度直方图,构建表征梯度的统计特征向量。对图像进行分块处理,能够在一定程度上降低图像因为局部变化带来的影响,可以较好的表示处图像像素点之间的梯度关系。该方法原理简单,适应能力强,并且具有较好的鲁棒性,是一种图片特征提取的有效方法。
梯度是像素值变化最快的方向,幅值记为H,方向记为α。假设有一像素点坐标(x,y),梯度计算方法为
(6)
式(6)中:像素点水平方向梯度为Hx(x,y);垂直方向梯度为Hy(x,y);像素值为G(x,y)。
梯度幅值为
(7)
梯度方向为
(8)
在提取方向梯度直方图时,首先将图像灰度化后归一处理,然后将图像划分为若干个单元。将360°的梯度方向划分成多个方向范围,将方向范围记作D表示。如图3所示,将梯度方向划分成九个范围D1~D9,统计单元中的像素点梯度方向和梯度幅值,累积成直方图,即为这个单元的方向梯度直方图,也就是由9个元素组成的特征向量。
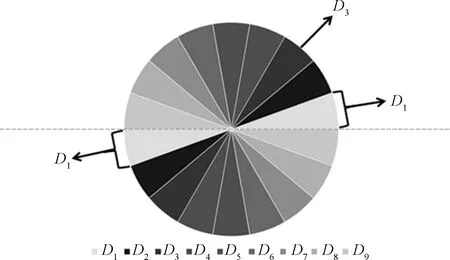
图3 梯度方向划分示意图
选取特定的直方图梯度方向组数,组数即代表特征数,让若干个单元整合成一个块,再让这个块以一定的步长沿横向和纵向移动数次,遍历整个图像矩阵,即得到代表方向梯度直方图的特征向量。设方向组数为Q,单元数为M,横向移动次数为X,纵向移动次数为Y,最后得到的HOG特征向量为一维行向量,则向量内特征元素个数为Q×M×X×Y。
3 基于GLCM-HOG特征的诊断流程
采用灰度共生矩阵和方向梯度直方图两种方法,提取时频图像的特征,并利用支持向量机[16](support vector machine,SVM)进行训练分类。在提取图像特征,构建输入特征向量时,若数据过大,特征中无用的信息不仅会增加计算机的运算量,同时会给特征识别增加困难,引起维数灾难;但若特征数据过少,则不足以反映图像的特征信息,影响分类效果。
故将时频图像的GLCM特征与HOG特征进行融合,通过调整特征提取的参数,构建能够高度表征时频图像信息的特征集,输入支持向量机中进行图像分类,进而实现往复压缩机的故障诊断。如图4所示,具体步骤如下:
(1)分别采集往复压缩机故障前后的振动信号,利用小波变换的方法生成时频图像。
(2)归一化生成时频图像的灰度共生矩阵,从灰度共生矩阵中提取GLCM特征,输入支持向量机分类。
(3)调整灰度共生矩阵的特征组合和生成角度θ,比对分类效果选取最优参数,将该组特征作为输出。
(4)在原有GLCM特征的基础上,加入图像的HOG特征,将融合特征输入支持向量机。
(5)将GLCM-HOG融合特征输入支持向量机的分类效果与仅输入GLCM特征的分类效果进行对比,得出结论。

图4 基于时频图像GLCM-HOG特征融合的往复压缩机故障诊断流程图
4 实验及结果分析
小头瓦磨损是往复式压缩机的一种典型故障,本文根据某新氢压缩机在小头瓦磨损故障前后的状态,采集设备运行时的气缸振动信号,以0.2 s为一周期,两个周期的振动信号作为一张时频图像的数据来源。小波变换生成故障状态下和正常状态下往复压缩机的振动时频图各600张,共1 200张时频图用于往复压缩机故障诊断方法的实验验证。
4.1 GLCM特征作为输入
根据2.1节可知,灰度共生矩阵的生成取决于θ、d和G三个参数,因此综合考虑0°、45°、90°、135°四个角度下对比度、相关、能量、同质这四种特征的参数提取,由其构建特征向量作为支持向量机的输入。
4.1.1 特征种类
灰度共生矩阵特征数,决定了输入支持向量机的特征矩阵的大小,但由于不同特征之间可能存在关联,所以特征数增加并不一定能够提高分类准确率。因此,首先在方向0°的条件下得到灰度共生矩阵,从中提取对比度、相关、能量、同质四种特征组合,支持向量机分类结果如表1所示。将对比度记为W1、相关记为W2、能量记为W3、同质记为W4。

表1 特征种类与分类结果关系表
从表1中可以看出,在只输入一个特征的情况下,对比度的准确率最高。在选用对比度这个灰度共生矩阵二次特征后,与其他的特征联合,得到的准确率不变,这说明在本次测试中,对比度已足够支持向量机的特征使用,其他的为冗余数据。
4.1.2 方向θ
将图像的灰度值G设置范围为0~255,将生成灰度共生矩阵的方向分别设置为0°、45°、90°、135°,以及两种角度的组合,但对于两种角度的组合,构建特征向量时,将两个方向下的特征向量对应的值分别求平均和标准差,从而构建一个新的灰度共生矩阵特征向量,此向量为单方向下特征向量长度的2倍,再将特征向量输入支持向量机中。
得到各角度下的分类结果如表2所示,从表2中可知,在方向设置为0°、90°联合时,得到的准确率最高为72.33%,所用时间为88.542 s。虽然能在较短时间下完成模型的训练与图片的分类,但是得到的模型识别准确率较低,不能满足故障分类所需的准确率要求。

表2 方向θ与分类结果关系表
4.2 GLCM-HOG融合特征作为输入
将灰度共生矩阵提取的参数输入支持向量机(SVM)进行分析,得到的准确率不高。因此,在原有灰度共生矩阵特征的基础上,加入方向梯度直方图特征,将GLCM和HOG融合特征输入支持向量机。以随机选取的300张故障状态下的时频图和300张正常状态下的时频图为测试图片数据,改变输入训练的图片数量,支持向量机得到的分类效果如表3所示。

表3 SVM计算时间和准确率
由表3可以看出,当训练图片样本数在20~100张时,仍能实现80%以上的分类准确率,表明了支持向量机对于小样本数据处理的优势。在训练样本图片数为200以下时,随着输入训练数据量的增加,分类的准确率在逐渐上升。
但是,当训练图片输入数量增加为300张时,分类的准确率有了略微的下降。这是由于,支持向量机是一种小样本学习方法,少数支持向量决定了最优决策面,也即决定了最终分类结果的依据。当训练的样本数据量增加到一定程度时,此时的样本增加的多为冗余样本,真正能够对识别起作用的数据并不多。因此这些冗余样本数据不仅不会对分类效果有帮助,反而会提升计算机工作量,增加训练计算时间,并且在一定程度上可能会影响其对于有用特征的识别,导致了识别准确率的轻微降低。
当训练样本为400张时频图,对测试图像的识别准确率达到最高为92.33%,该次识别得到的混淆矩阵为

(9)
在300张故障状态的时频图中有24张识别错误;300张正常状态的时频图中有22张识别错误。与只输入GLCM特征相比,在加入HOG特征后,支持向量机的分类准确率提高了近20%,显著提高了识别准确率。本次研究综合利用振动信号时频图像的GLCM-HOG融合特征,结合支持向量机的分类方法,最终实现了92.33%的识别准确率。
5 结论
通过采集往复压缩机运行时的振动信号,利用小波变换的方法生成信号的时频图像,从时频图像中分别提取GLCM特征与HOG特征,构建融合特征向量输入支持向量机进行分类。实验结果表明,与输入单一特征相比,融合特征的输入大大提高了分类的准确率,并且能完成小样本数据下的分类任务。基于振动信号时频图像GLCM-HOG特征融合的方法,将设备的故障诊断问题转化成时频图像的特征提取和识别问题,实现了往复压缩机故障的准确诊断。
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
强度与环境(2021年3期)2021-07-27
现代电子技术(2021年1期)2021-01-17
小学生作文(低年级适用)(2020年10期)2020-11-10
现代电子技术(2020年13期)2020-08-07
福建基础教育研究(2019年2期)2019-09-10
福建基础教育研究(2019年2期)2019-05-28
微型电脑应用(2019年1期)2019-01-23
宇航计测技术(2018年3期)2018-09-08