
5G网络辅助的GNSS定位性能分析
2021-05-14 08:30张建国韩春娜周鹏云华信咨询设计研究院有限公司浙江杭州3005诺基亚上海贝尔股份有限公司浙江杭州30053
邮电设计技术 2021年4期
张建国,韩春娜,周鹏云(.华信咨询设计研究院有限公司,浙江杭州 3005;.诺基亚上海贝尔股份有限公司,浙江杭州 30053)
0 引言
全球定位导航系统(GNSS——Global Navigation Satellite System)是一种利用卫星进行导航、定位、测量的空间无线定位系统,其基本原理是测量出已知位置的卫星到GNSS 接收机之间的距离,然后综合多颗卫星的数据计算出UE 的具体位置。目前在轨运行的GNSS 系统包括美国的GPS 系统、中国的北斗系统(BDS——BeiDou Navigation Satellite System)、俄罗斯的GLONASS以及欧盟的伽利略系统Gallileo[1]。
GNSS定位方法存在2个部分误差。第1部分是系统性的误差,如卫星钟误差、星历误差、电离层误差、对流层误差等,这类误差对每一个GNSS 接收机都是公有的,利用差分技术,可以消除系统性误差,根据差分基准站发送的信息方式不同,差分定位分为位置差分、伪距差分和实时动态(RTK——Real-time kinematic)载波相位差分。第2部分是随机发生的误差,如接收机的内部噪声、通道延迟、多径效应等,这部分误差无法系统性消除。
5G网络具有大带宽、低时延的特性,当GNSS通过5G 网络与GNSS 接收机交互信息后,5G 网络可以辅助GNSS 接收机减少初始化时间、增加接收机灵敏度、减少功耗和提高定位精度。
1 5G网络辅助的GNSS定位原理
5G 网络辅助的GNSS 定位有2 种工作模式,基于UE(UE-Based)的GNSS 定位和UE 辅助(UE-Assisted)的GNSS定位。
对于基于UE 的GNSS 定位,UE 中包括完整的GNSS 接收机,位置计算在GNSS 接收机中进行,通过5G 网络传输给GNSS 接收机的信息分为2 类。第一类是星历和时钟模型、历书等信息,这类信息可以减少GNSS 接收机的初始化时间、增加GNSS 接收机灵敏度,因此显著提高测量速度,使得GNSS 接收机能够捕获和跟踪较弱的卫星信号,在较低SNR 条件下也能工作,这类信息的有效时间通常是2~4 h[2]。第2 类是RTK 改正数据和GNSS 物理模式,RTK 改正数据包括RTK 参考站信息、RTK 辅助站数据、RTK 观测值、RTK公共观测信息、RTK MAC(Master Auxiliary Concept)修正差、RTK 残余等,GNSS 物理模式包括状态空间表示(SSR——State Space Representation)轨道修正、SSR 时钟改正、SSR 码字偏差,这类信息与GNSS 接收机的测量信息相结合,可以大幅提高UE 的定位精度,这类信息的有效时间通常是几十秒到几分钟[3]。基于UE 的GNSS 定位的优点是通过5G 网络传输的数据较少,且定位时延较小,缺点是UE 需要增加相应的存储器和计算能力,尤其是RTK 定位,UE 需要增加专用的差分定位模块,增加了UE成本[4]。
对于UE 辅助的GNSS 定位,GNSS 接收机的主要功能在网络侧,UE 位置的计算在定位服务中心进行。定位服务中心可以把时间、可见的卫星列表、卫星信号的多普勒和码相位以及搜索窗口,通过5G网络传输给GNSS 接收机。GNSS 接收机把测量到的码相位和多普勒测量、(可选的)载波相位测量,通过5G 网络上报给定位服务中心。定位服务中心根据RTK 改正数据以及UE 提供的测量数据,计算出UE 的精确位置,然后再通过5G 网络把精确的位置信息反馈给UE。UE 辅助的GNSS 定位的优点是把复杂的数据处理功能交给定位服务中心完成,GNSS 接收机不需要增加额外的计算功能,因此对UE 的要求较低,缺点是时延较大,且上传的数据量较大。
5G 网络辅助的GNSS 定位原理如图1 所示。其中,基准站接收机负责采集GNSS 卫星的测量数据并传送至定位服务中心,定位服务中心用于实时接收基准站接收机的测量数据,进行数据质量分析、处理、评价,提供不同精度等级要求的改正数据,定位服务中心也可以接收GNSS 接收机上报的原始测量数据,完成特定UE的差分定位解算。
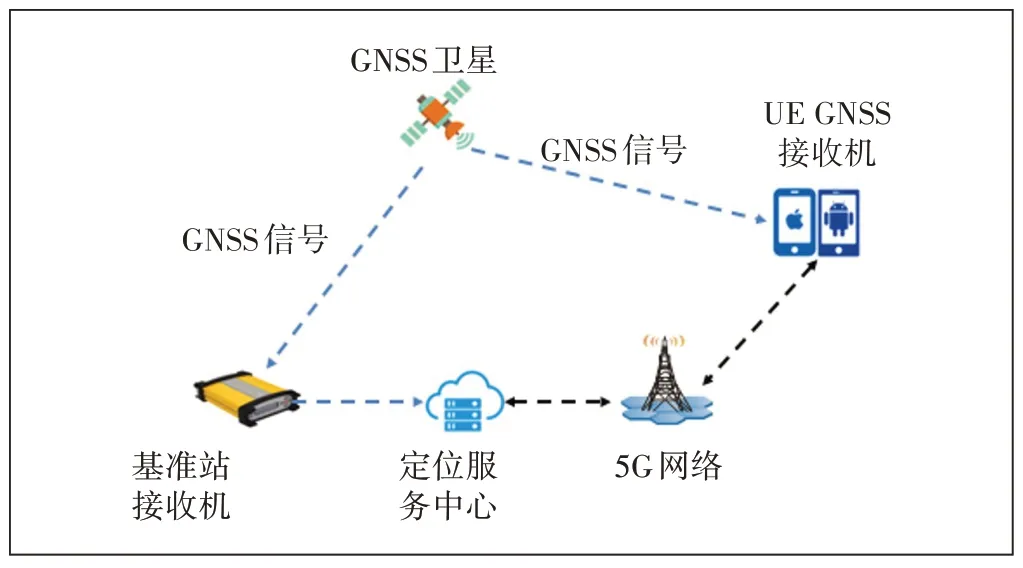
图1 5G网络辅助的GNSS定位原理
传统的无线通信网络由于速率较低、时延较大,可以满足基于UE 的GNSS 定位,对于UE 辅助的GNSS定位,只能为静止或者低速移动的UE 提供高精度定位,不能为高速移动的UE提供高精度定位,5G网络具有低时延特性,使得UE 辅助的GNSS 定位为高速移动的UE 提供高精度定位成为可能。本文接下来从定位精度和5G 无线网络负荷2 个方面对UE 辅助的GNSS定位性能进行分析。
2 UE辅助的GNSS定位精度分析
GNSS 的定位精度与定位算法、基准站接收机的位置和数量、RTK 改正数据和GNSS 接收机测量数据的发送频率等都有关系。以GPS 定位为例,民用GPS的定位精度是10~30 m,位置差分、伪距差分的定位精度可以达到米级,RTK 载波相位差分的定位精度可以达到厘米级,本文接下来只考虑由于网络时延造成的定位误差。
GNSS接收机的测量数据通过gNB、AMF发送至定位服务中心,定位服务中心完成差分定位解算后,再通过AMF、gNB 把精确的位置信息发送给GNSS 接收机,总的环回时延由3个部分组成,分别是传输网络的环回时延、设备的处理时间和空口的环回时延。
传输网络的环回时延和GNSS 接收机到定位服务中心的光纤长度有关,GNSS 接收机到定位服务中心的光纤长度是10 km、100 km 和1 000 km 时,传输网络的环回时延分别是0.1 ms、1 ms和10 ms[5]。
设备的处理时间包括定位服务中心、gNB 和AMF的处理时间,定位服务中心的处理时间通常为2 ms,gNB 和AMF 的单次处理时间通常是0.5 ms,因此总的设备处理时间是2+4×0.5 ms=4 ms。
对于eMBB,空口的环回时延与双工方式(FDD 或TDD)、子载波间隔(SCS——Sub-Carrier Spacing)、调度请求(SR——Scheduling Request)周期、数据到达时刻等有关,假设SR 周期=5 ms,对于TDD SCS=30 kHz,平均环回时延是7.75 ms,对于FDD SCS=15 kHz,平均环回时延是10.5 ms;使用预调度技术,对于TDD SCS=30 kHz,平均环回时延是3.3 ms(按SPS=1 ms计算),对于FDD SCS=15 kHz,平均环回时延是4.5 ms(按SPS=1 ms 计算)。对于uRLLC,通过mini-slot、上行免授权、下行资源抢占等技术,平均环回时延可以降低到1 ms以下[6]。
假设GNSS 接收机到定位服务中心的光纤长度是100 km,则传输网络的环回时延是1 ms,eMBB TDD SCS=30 kHz、eMBB FDD SCS=15 kHz 和uRLLC 的平均环回时延分别是7.75 ms、10.5 ms 和1 ms,则总的环回时延分别是1+4+7.75=12.75 ms(eMBB TDD SCS=30 kHz)、1+4+10.5=15.5 ms(eMBB FDD SCS=15 kHz)和1+4+1=6 ms(uRLLC)。
假设UE 的移动速度分别是60 km/h、120 km/h、200 km/h,则由于网络时延造成的定位误差如表1 所示。
从表1可以看出,在不考虑GNSS定位系统本身定位误差的情况下,由于网络时延造成的定位误差均在1 m 以下,满足3GPP 规范和辅助驾驶对高速移动UE的定位精度要求[7-8]。需要说明的是,表1 计算的定位误差是由于网络时延造成的最大定位误差,实际上定位服务中心可结合UE 的移动速度、移动方向、网络时延和高精度地图等数据,对UE 的移动位置进行预测,因此由于网络时延造成的定位误差可以远远小于表1中给出的值。此外,还可以通过低时延的网络结构,如MEC 技术等,减少总的环回时延,进一步提高定位精度。

表1 UE辅助的GNSS定位误差
3 5G无线网络负荷分析
对于下行方向,定位服务中心通过5G 网络向GNSS 接收机传输的信息的有效期通常是几十秒到几分钟,定位服务中心通过5G网络传输的位置信息虽然较为频繁,但是数据量较小,因此UE 辅助的GNSS 定位不会给5G 网络的下行带来严重的负担。对于上行方向,通过5G 网络传输的是GNSS 接收机的原始测量数据,这类数据通常较大,因此会给5G 网络的上行造成较大的负担,本文接下来主要分析上行方向的无线网络负荷。
GNSS 接收机上报的原始测量数据的大小与下列因素有关[9]。
a)GNSS 星座数量:也即GNSS 接收机跟踪测量的是哪一个GNSS 的信号,本文假定GNSS 接收机跟踪测量的是BDS和GPS。
b)GNSS 卫星信号数量NSignal:对于每个GNSS,GNSS 接收机可以上报最多8 个GNSS 信号的测量数据。对于BDS,共计有9 种GNSS 信号类型,GNSS 接收机通常跟踪测量3 个信号,如B1 I、B2 I、B3 I;对于GPS,共计有18 种GNSS 信号类型,GNSS 接收机通常跟踪测量4 个信号,如L1 C/A、L1 P、L2 P、L5 或L1 C/A、L2 Z-tracking、L2C、L5。
c)GNSS 卫星数量NSat:也即GNSS 接收机跟踪测量的卫星数量,对于BDS 和GPS,GNSS 接收机可以分别同时跟踪14 个卫星,在空旷地带的绝大部分地区,能至少分别跟踪9 颗卫星,对于BDS 和GPS,本文假定GNSS接收机分别上报10个卫星的测量数据。
d)GNSS 卫星测量数据:对于每个卫星的每类信号,需要上报的测量数据有卫星地址(8 bit)、卫星信号的载干比(8 bit)、多径指示(2 bit)、载波质量指示(2 bit)、码相位(21 bit)、整数相位(7 bit)、码相位RMS 误差(8 bit)、多普勒测量(16 bit)。除此之外,为了提供高精度定位,根据定位服务中心的请求,GNSS 接收机还可以上报载波相位测量,载波相位测量也称为累加的三角距离(ADR——Accumulated Delta Range),ADR需要25~41 bit。因此GNSS 卫星测量数据NMeas共有113 bit,如果不上报ADR,则卫星测量数据NMeas共有72 bit。
对于每个GNSS,GNSS 接收机一次上报的测量数据NReport可以按照公式(1)计算。

其中,X是LTE 定位协议(LPP——LTE Positioning Protocol)层、NAS层、RRC层、PDCP层、RLC层、MAC层等开销信息的比例,通常是20~30%。
假设开销信息的比例是25%,对于BDS和GPS,一次上报的测量数据分别是3×10×113×(1+25%)=4 238 bit、4×10×113×(1+25%)=5 650 bit,如果BDS 和GPS 的测量数据同时上报,则一次上报的测量数据是9 888 bit。
假设GNSS 接收机上报测量数据的频率是1 Hz,则上报BDS、上报GPS、同时上报BDS 和GPS 的测量数据的速率分别是4.14 kbit/s、5.52 kbit/s 和9.66 kbit/s;假设GNSS 接收机上报测量数据的频率是10 Hz,则上报BDS、上报GPS、同时上报BDS 和GPS 的测量数据的速率分别是41.38 kbit/s、55.18 kbit/s和96.56 kbit/s.
针对上面计算的5G 无线网络负荷,有3 点需要说明。
a)对于eMBB,一次传输几千bit 不会对上行造成太大的负担,但是对于uRLLC,则会对上行造成较大的负担,因为为了保证低时延和高可靠性,uRLLC 单次传输的数据包较小,较大的数据包需要分割成多个较小的数据包后分别传输,相应的增加了空口时延。
b)为了减少UE 上报的测量数据,UE 可以只上报信号最好的4 颗卫星的测量值,并减少上报的卫星信号数量,如对于每个GNSS,只上报2 个卫星信号;另外,在不需要高精度定位的场景下,UE 可以不报告ADR,通过以上措施,UE 上报的测量数据可以减少80%以上。
c)根据目前的3GPP 规范,GNSS 接收机的上报频率较低,当UE 高速移动时,该上报频率满足不了高精度定位要求,因此,为了满足高速移动UE 的高精度定位需求,需要提高上报频率或者采用事件触发的上报方式[9]。
4 结束语
除了通过辅助GNSS,为UE 提供高精度定位外,5G 网络也可以利用自身的无线信号,在不依赖GNSS的情况下,通过可观察到达时间差(OTDOA——Observed Time Difference Of Arrival)、增强小区ID 定位(E-CID——Enhanced Cell ID)等技术为UE 提供定位,虽然其提供的定位精度还达不到GNSS 的水平,但是5G 信号具有大带宽、高SINR 的优势,其提供的定位精度显著高于传统的无线网络,基于5G网络的定位具有广阔的应用空间。
猜你喜欢
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
测控技术(2018年6期)2018-11-25
测控技术(2018年4期)2018-11-25
电子制作(2018年19期)2018-11-14
雷达学报(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
