波浪滑翔器测波技术研究
2021-05-15 07:49秦玉峰齐占峰侯二虎李国富冯志涛
水下无人系统学报 2021年2期
秦玉峰, 齐占峰, 张 爽, 侯二虎, 李国富, 冯志涛
波浪滑翔器测波技术研究
秦玉峰1,2, 齐占峰1, 张 爽1, 侯二虎1, 李国富1, 冯志涛1
(1. 国家海洋技术中心, 天津, 300112; 2. 自然资源部 海洋环境探测技术与应用重点实验室, 广东 广州, 510300)
当前波浪观测主要采用波浪浮标进行定点观测, 利用波浪滑翔器等新型海洋移动观测平台进行走航式波浪观测的研究较少。针对此, 文章利用“蓝鲸”波浪滑翔器开展波浪滑翔器的测波可行性、测波方法及测波能力研究。介绍了波浪滑翔器的结构组成、工作原理和测波实现方法, 在分析波浪滑翔器和波浪浮标不同测波原理的基础上设置对比试验。基于试验结果分析了波浪滑翔器和波浪浮标关于波高、波周期、波数及波向等波浪特征数据的差值和相关性, 解析差值存在机理并提出消除差值和修正波浪滑翔器观测数据的理论依据。分析可知, 波浪滑翔器和波浪浮标相比, 波浪数据重合度较高, 差值较小, 相关性极高, 平均相关系数达到0.9以上, 数据质量可信度高, 验证了波浪滑翔器测波数据的准确性, 证明了波浪滑翔器用于波浪观测的可行性。
波浪滑翔器; 波浪浮标; 波浪特征
0 引言
波浪滑翔器是一种利用波浪动力推进, 吸收太阳能为通信、定位、控制、导航及数据采集系统供电的新型海洋移动观测平台[1-3]。其特有的双体结构可有效利用环境能源为自身长周期、不间断地环境探测和数据采集提供源源不断的动力, 是目前唯一不需要外部能源供给即可实现长周期海洋环境作业的无人航行器, 目前已广泛应用于海洋环境观测、科学考察、石油及天然气探测和军事领域[4-8]。波浪滑翔器起源于美国, 国外对波浪滑翔器的研究主要集中在液体机器人公司(Liquid Robotics), 目前该公司已完成SV2和SV3两型波浪滑翔器的产品化, 并在多个领域进行了应用。国内波浪滑翔器技术的研究始于2010年前后, 经过多年发展, 已较为成熟, 具有代表性的主要有国家海洋技术中心研制的“蓝鲸”号[9]、中国船舶集团第710研究所研制的“海瑶”号[10]和中国海洋大学研制的“海哨兵”号[11], 如图1所示。此外, 中国海洋大学还研制了体积较大的“黑珍珠”波浪滑翔器, 并进行了南海台风的观测应用试验[12]。
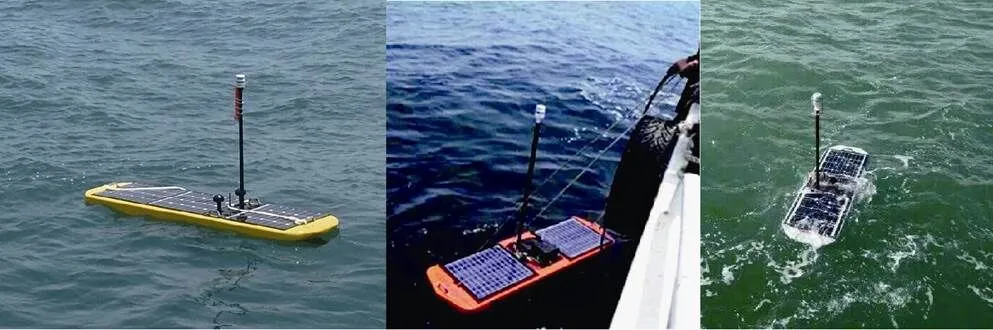
图1 “蓝鲸”号、“海鳐”号及“海哨兵”号波浪滑翔器
目前, 海面波浪的观测方式主要有重力测波、激光测波、雷达测波及卫星高度计测波等[13], 最常用的是采用重力测波方式的波浪浮标。波浪浮标是指放置在水面随波浪上下起伏的锚系系统, 通过其内部的加速度传感器或重力传感器采集浮标随海面波动而变化的运动参数, 进而计算出波浪要素参数[14]。典型的波浪浮标有荷兰的“wave rider”[15-16]和加拿大的“Triaxys”[17]。国内如国家海洋技术中心[18]、中国海洋大学[19]和山东省科学院海洋仪器仪表研究所[20]等多家单位也研制了此类型的浮标。然而, 利用移动观测平台诸如波浪滑翔器搭载测波传感器进行海面波浪走航式观测技术的研究还较少, 对于波浪滑翔器的测波特性尚不清楚。
Maqueda等[21]利用全球定位系统(global po- sitioning system, GPS)测波技术在波浪滑翔器上开展了波高观测技术研究, 但缺少波数、波向及波周期等参数的采集。Ngo和Smith等[22-23]探讨了波高与波浪滑翔器航速的对应关系, 但对波浪特征数据观测的真实性及有效性研究尚未涉及。
文中开展了基于波浪滑翔器的测波技术研究, 分析了其结构组成、工作原理及测波方法, 简要介绍了测波算法。为检验波浪滑翔器的测波特性和测波数据的真实性, 利用“蓝鲸”波浪滑翔器在青岛千里岩海域设置了波浪滑翔器与波浪浮标的对比试验, 并依据试验结果, 分别对波浪滑翔器和波浪浮标观测获得的波高、波周期、波数和波向等波浪要素进行了差值和相关性分析。由分析结果可知, 波浪滑翔器观测的波浪数据与波浪浮标观测的波浪数据间相关性极高, 差值较小, 验证了波浪滑翔器进行波浪观测的可行性, 为我国波浪观测提供了一种新的研究方向和技术手段。
1 波浪滑翔器结构组成与工作原理
1.1 结构组成
波浪滑翔器由漂浮于水面的舟形上浮体和悬浮于水下的水下牵引机组成。舟形上浮体采用流体线型动力结构, 其上搭载有太阳能电池板、航向稳定舵、通信及定位天线、数据采集传感器等。舟形上浮体具有较小的阻力和较大的浮力, 可随波上下振荡。水下牵引机是转化波浪动力的主要部件, 其上对称布置6对能量转化翼板、转向舵、电子罗盘及传感器等, 水下牵引机上下振荡的过程中, 能量转化翼板会因水阻作用上下摆动, 将舟形上浮体吸收的波浪动力转化为水下牵引机的前向动能。
1.2 工作原理
波浪滑翔器利用波浪向前运动, 当海面水质点向上运动时, 波浪滑翔器在波浪力的作用下被迫向上运动; 当水质点向下运动时, 波浪滑翔器会因自重而跟随水质点向下运动, 如图2所示。
利用波浪滑翔器随波运动的特点, 在波浪滑翔器的舟形上浮体上安装测波传感器即可对海面波浪进行实时的观测, 获取波高、波周期、波数和波向等波浪要素参数。
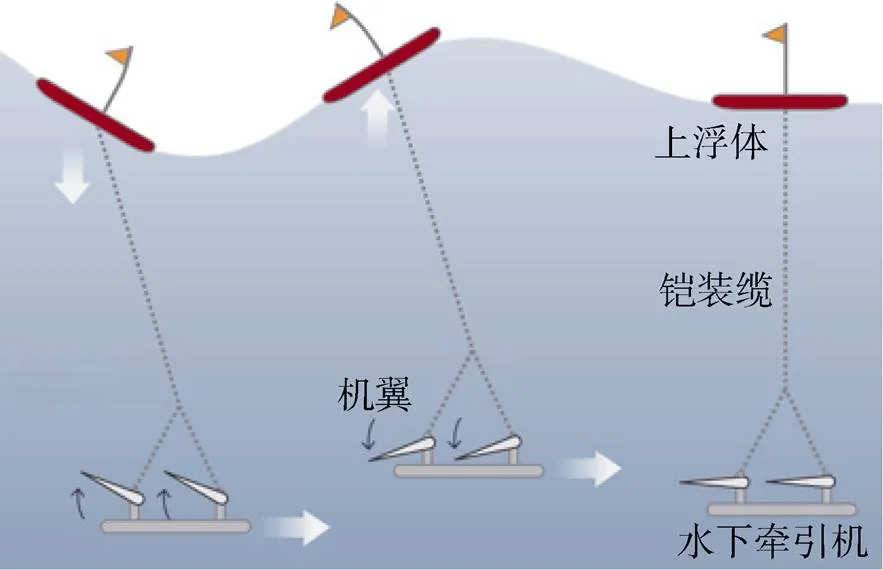
图2 波浪滑翔器随波运动示意图
2 测波算法
波浪是水质点离开平衡位置, 做周期性的振动, 并向一定方向传播而形成的一种波动。假设波浪水质点的波动为平稳的正态过程且具有各态历经性, 则波浪在时间和空间上的统计具有一致性。波面可表示成无数个不同振幅、频率、相位及不同波向余弦波的叠加。

假设波浪滑翔器完全随波运动, 则波浪滑翔器观测波浪的垂直波面位移为

由此可知要测量波浪信息, 需要记录波浪滑翔器随波运动的位移和时间。
1) 波高和波周期

波高和波周期的计算公式如下


2) 波向

3) 波数
波数是单位观测时间内, 观测到的波浪数量累计值。
3 试验设计
为研究波浪滑翔器的测波特性, 开展了“蓝鲸”波浪滑翔器走航式测波特性的试验研究, 并在相关路径附近设置波浪浮标进行波浪信息比对。基于试验结果, 将波浪滑翔器与波浪浮标所观测的波浪数据进行波浪特征信息相关性及差值分析, 以此研究波浪滑翔器走航式测波的技术特点及测波特性。“蓝鲸”波浪滑翔器的结构组成如图3所示。其主要特征参数见表1。
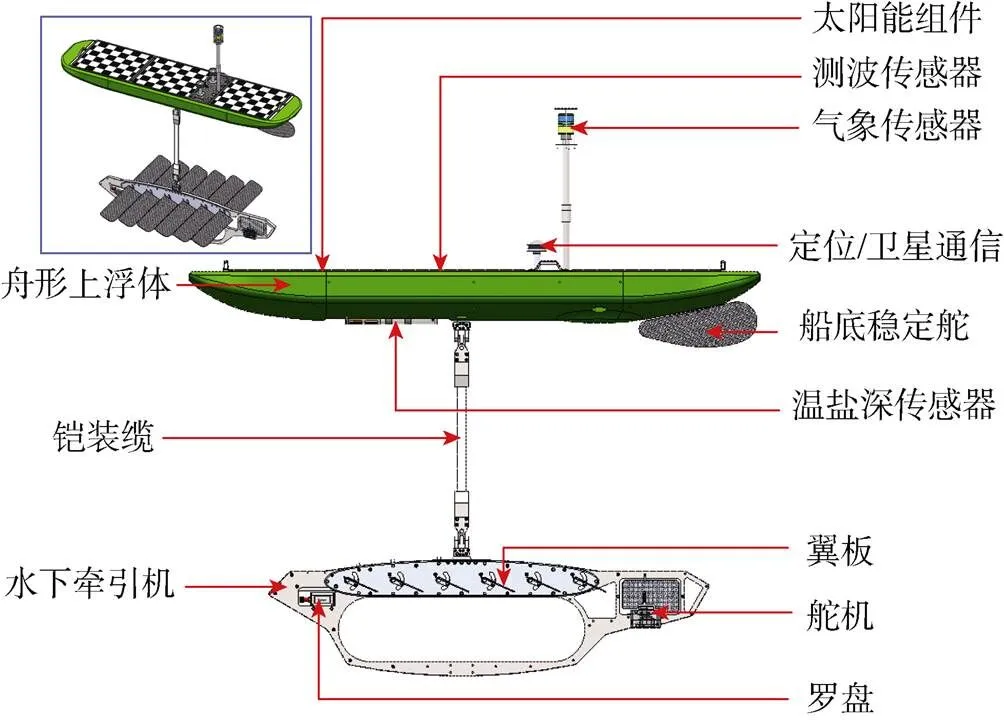
图3 “蓝鲸”波浪滑翔器结构

表1 “蓝鲸”波浪滑翔器主要特征参数
为保证观测数据在时间和地点上的同步性及采集信息的一致性, 试验方案设计遵循以下原则:
1) 波浪滑翔器和波浪传感器应选取相同型号、相同观测精度及量程的传感器;
2) 波浪滑翔器与波浪浮标的观测位置应大致处于同一区域;
3) 对波浪特征信息的观测应遵循同步观测的原则。
设定波浪滑翔器的走航路径为绕定点的圆周运动, 并在波浪滑翔器走航路径的圆心位置布放用于试验数据对比的波浪浮标。波浪滑翔器的走航路径及波浪浮标的锚定位置如图4所示。

图4 海试区域及走航路径
4 数据分析
基于波浪滑翔器和波浪浮标对比试验的数据, 分别进行波高、波周期、波向及波数等数据质量的比对, 并对波浪滑翔器与波浪浮标所观测的波浪特征数据进行相关性和差值分析。
相关性分析是指对2个或多个具备相关性的数据进行相关程度研究, 用相关系数表示, 且
对于,之间的相关系数, 有:
1) ||越大, 表示和之间相关性越强;
2) 当0<1时, 表示和正相关;

统计学一般认为||≥0.8即表示2个变量高度相关。
4.1 波高分析
4.1.1 相关性分析

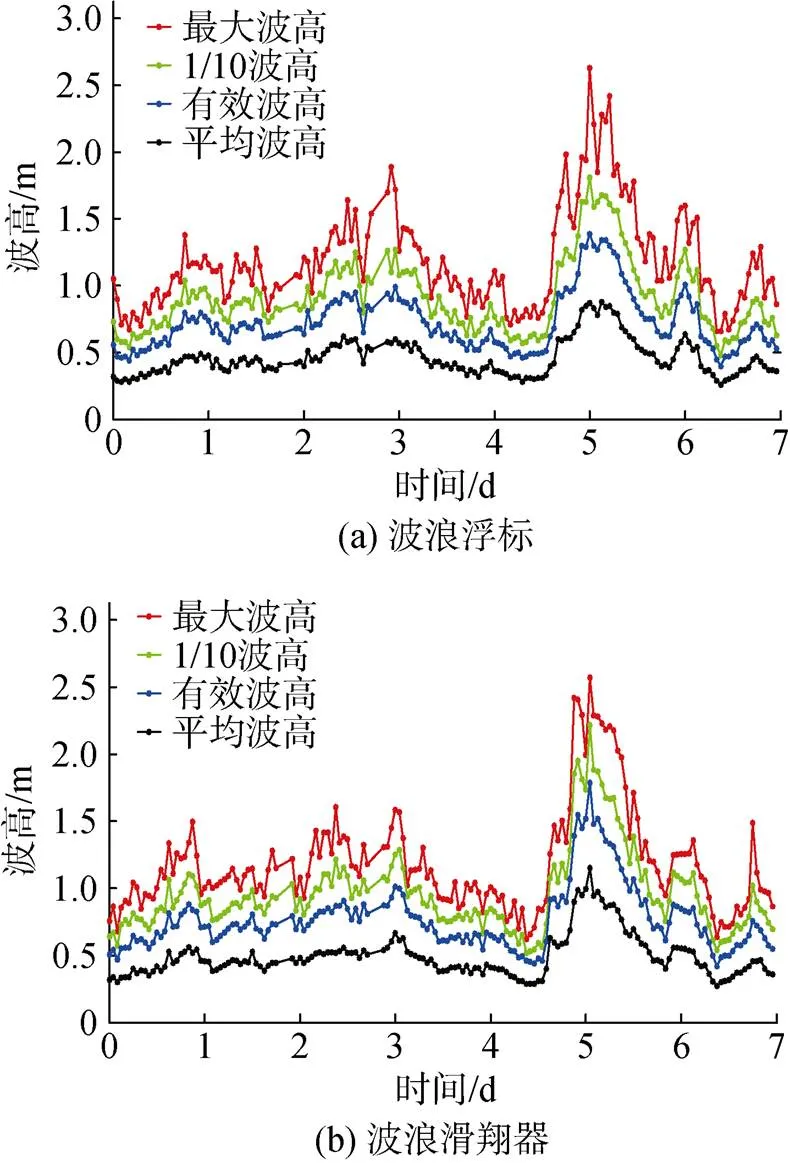
图5 波高曲线
由图5和图6可知, 波浪滑翔器和波浪浮标的波高分布曲线大致相同, 曲线重合度较高, 4种特征波高中仅最大波高的分布曲线重合度稍低(见图6(a))。由图7可知, 4种特征波高的相关系数分别是0.8491, 0.9205, 0.9401和0.9414, 平均相关系数为0.9127。4种波高相关系数的大小关系为最大波高<1/10波高<有效波高≤平均波高。
4.1.2 差值分析
分别计算波浪滑翔器与波浪浮标间单一特征波高的观测差值及差值绝对值, 并分别绘制差值曲线, 如图8所示。分析4种特征波高差值曲线, 波高差值最大的是最大波高, 最大差值为0.74 m, 平均差值为0.16 m, 平均差值与波浪浮标波高数据比值的百分比为13.4%; 波高差值最小的是平均波高, 最大差值为0.32 m, 平均差值为0.05 m, 平均差值与波浪浮标波高数据比值的百分比为10.9%。综合4种特征波高的平均差值为0.095 m。
此外, 长期的观测数据表明, 波浪滑翔器观测到的波高平均值略大于波浪浮标, 波高的平均值存在微小的偏差, 差值约0.03 m。
由于“蓝鲸”波浪滑翔器的测波传感器安装位置稍稍偏后, 当其舟形上浮体随波上下震荡时,会产生5~10°的倾角, 导致测波传感器的位置产生一定的上扬和下降, 进而使得波高的观测值有一定增大, 因测波传感器的安装位置导致波高观测的偏差图解如图9所示。差值可通过调整测波传感器的安装位置予以消除。
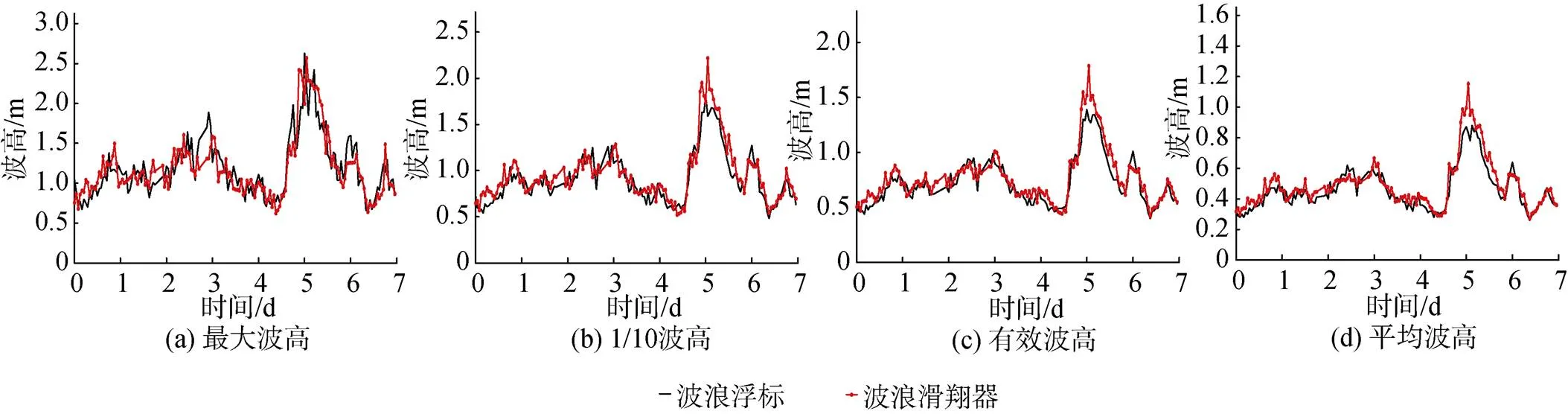
图6 波高对比曲线
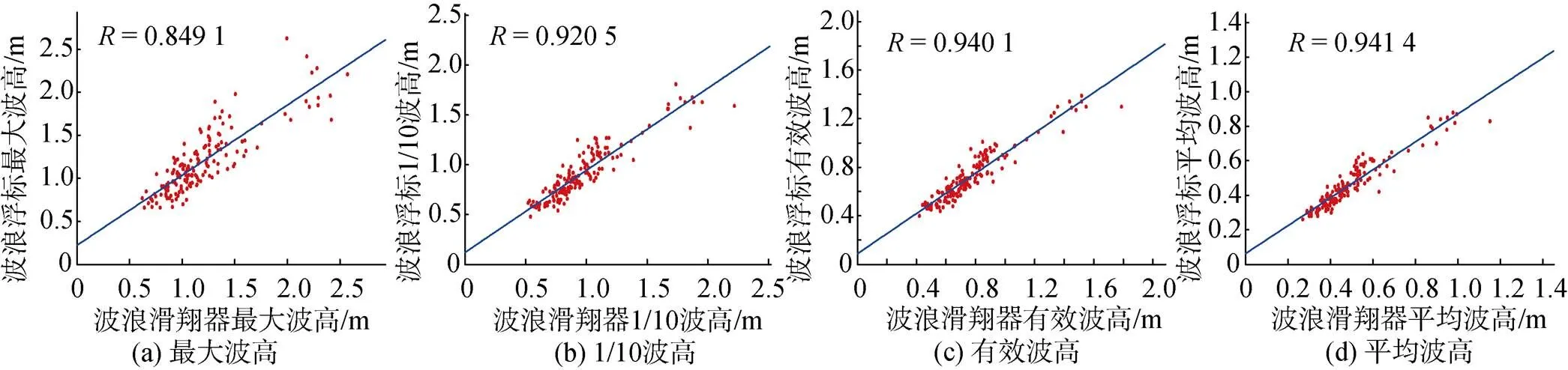
图7 波高相关性分布

图8 波高差值曲线
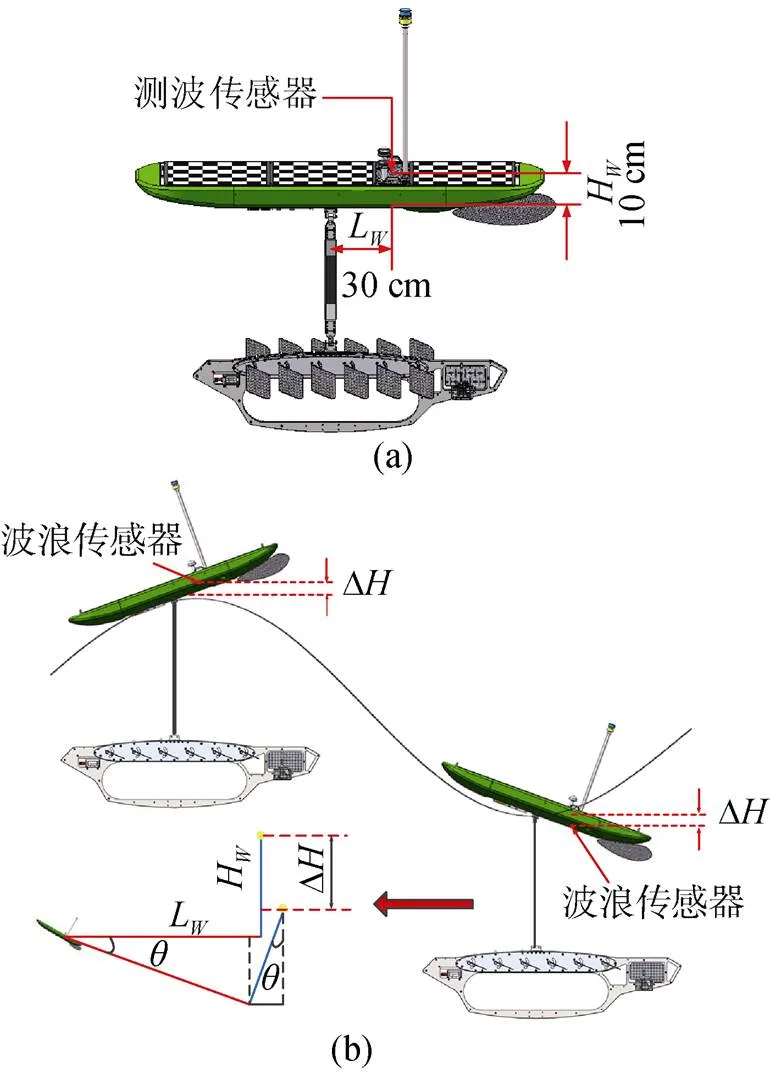
图9 波高差值图解
4.1.3 小结
由波高相关性以及差值分析可以知道, 波浪滑翔器与波浪浮标针对波高的观测数据有较好的一致性, 数据相关性极高, 平均相关系数达到0.912 7。虽然2种平台观测的波高间存在一定差值, 但差值较小, 平均差值仅为0.095 m, 且差值可通过调整测波传感器的安装位置予以消除, 因此可认为波高的观测结果一致。由此说明, 波浪滑翔器具有很好的随波性, 能够较为真实地反应波高的变化, 证明运用波浪滑翔器进行波高的观测是可行的。波浪滑翔器和波浪浮标波高观测的部分特征数据见表2。
4.2 波周期分析
4.2.1 相关性分析

表2 波高特征参数
分别绘制波浪滑翔器和波浪浮标关于波周期数据的对比曲线, 如图10所示。分别绘制波浪滑翔器和波浪浮标关于单一特征波周期的对比曲线, 如图11所示。根据式(7)计算每一种特征波周期的相关系数, 绘制波浪滑翔器和波浪浮标关于单一特征波周期的相关性分布图, 如图12所示。
波浪滑翔器与波浪浮标的波周期分布曲线大致相同, 重合度较高。4种特征波周期中仅最大波周期的分布曲线重合度稍低, 见图11(a)。
由相关系数计算结果可知, 4种特征波周期的相关系数分别为0.8352, 0.9377, 0.9670, 0.9469, 平均相关系数为0.9217。其中, 相关系数最大的是有效波周期, 达到0.9670; 相关系数最小的是最大波周期, 为0.8352。4种波周期相关系数的关系如下: 最大波周期<(1/10)波周期<平均波周期<有效波周期, 与波高相关性的大小分布趋势大致相同。
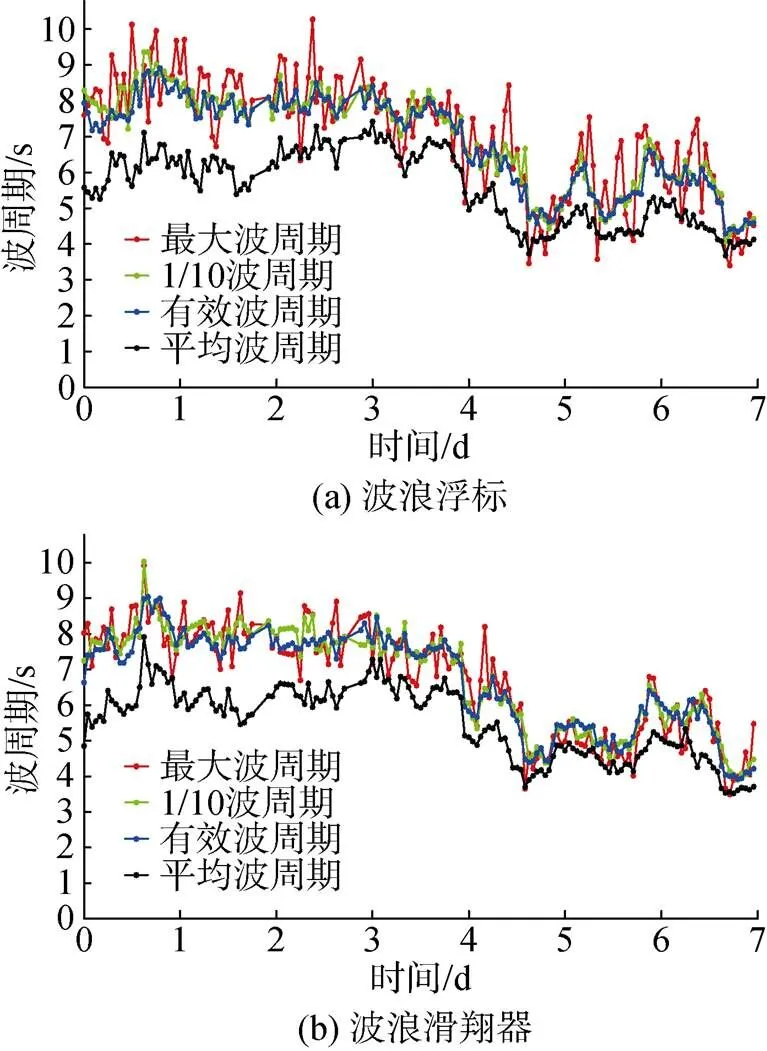
图10 波周期曲线
4.2.2 差值分析
分别计算波浪滑翔器与波浪浮标间单一特征波周期的观测差值及差值绝对值, 并绘制差值曲线, 如图13所示。
如波高的观测一样, 最大波高对应的最大波周期的差值最大, 最大差值2.81 s, 平均差值为0.73 s, 平均差值与波浪浮标波周期数据比值的百分比为10%; 波周期差值最小是平均波周期, 最大差值为1.1 s, 平均差值为0.29 s, 平均差值与波浪浮标波高数据比值的百分比为4.1%; 综合4种特征波周期的平均差值为0.425 s。
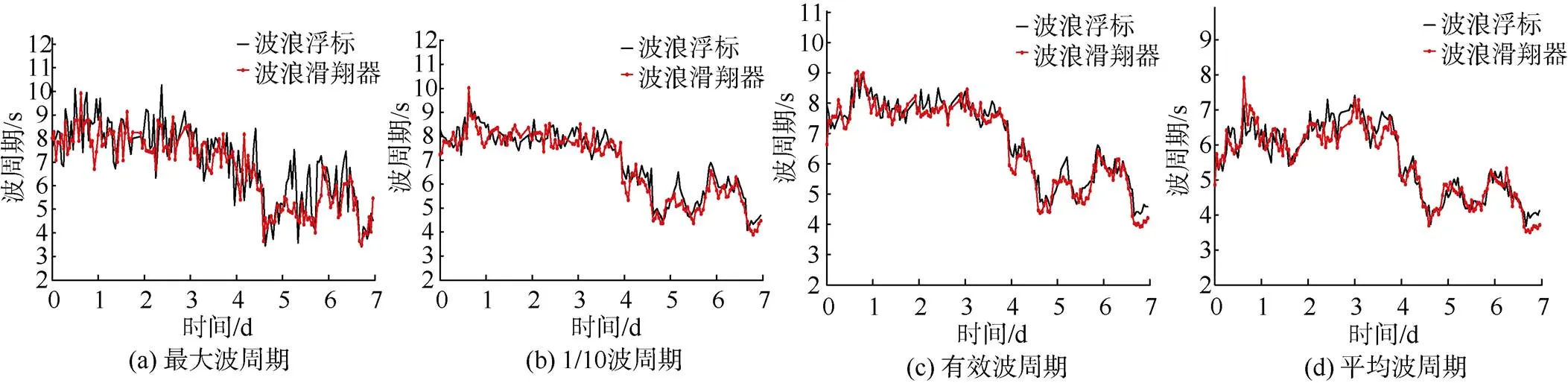
图11 波周期对比曲线

图12 波周期相关性分布
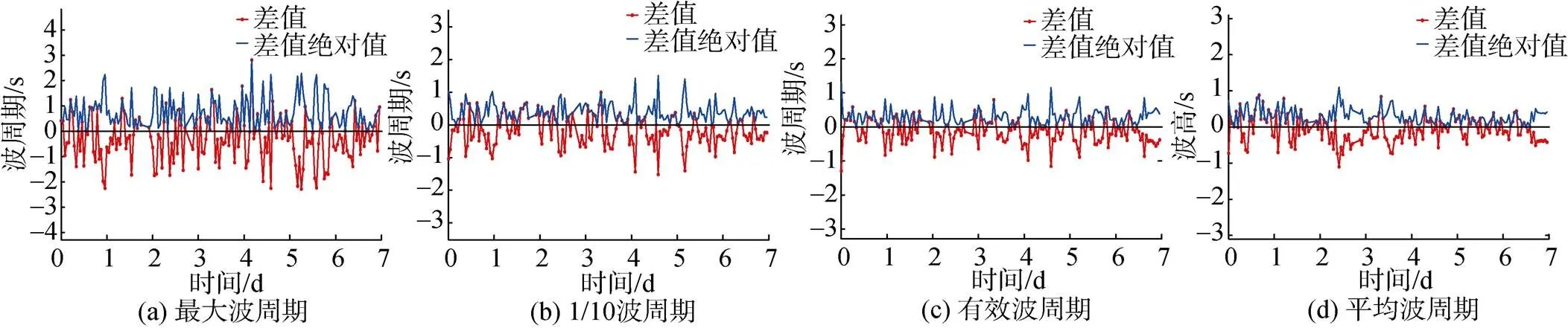
图13 波周期差值曲线
4.2.3 小结
由波周期相关性和差值分析可知, 针对波周期的观测, 波浪滑翔器与波浪浮标相比, 观测数据一致性较高, 数据相关性极高, 平均相关系数达0.921 7。波浪滑翔器与波浪浮标观测的波周期间虽存在一定差值, 但差值较小, 平均差值仅为 0.425 s。通过调整测波传感器的安装位置, 在消除波高观测数据差值的同时亦可消除波周期观测的差值, 可认为波浪滑翔器与波浪浮标对波周期的观测结果一致。由此说明, 针对波周期的观测, 波浪滑翔器具有很好的随波性, 能够较为真实地反应波周期的变化, 运用波浪滑翔器进行波周期的观测是可行的。有关波浪滑翔器和波浪浮标关于波周期观测部分特征数据如表3所示。
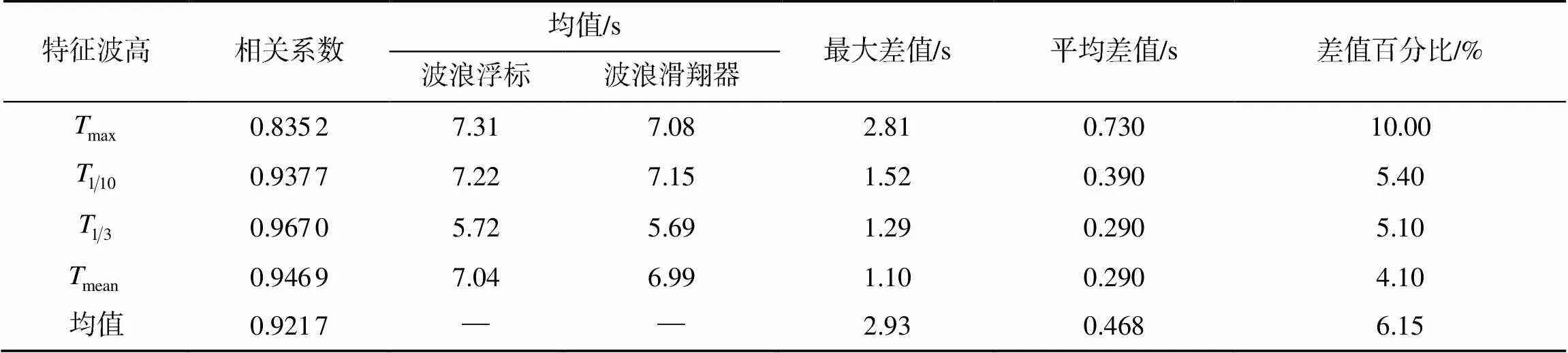
表3 波周期特征参数
4.3 波向分析
4.3.1 相关性分析
绘制波浪滑翔器和波浪浮标关于波向数据的对比曲线, 如图14(a)所示。根据式(7)计算波浪滑翔器和波浪浮标间关于波向数据的相关系数, 绘制相关性分布图, 如图14(b)所示。

图14 波向对比曲线及相关性分布
由图14(a)可知, 除第3天前后外, 波浪滑翔器和波浪浮标关于波向的曲线分布大致相同, 曲线重合度较高, 波向相关系数为0.921 8,相关性极高。此外, 由波向对比曲线可知, 试验开始的前5天波浪浮标观测的波向大约在140°左右上下振荡, 而波浪滑翔器观测的波向则分布在波浪浮标观测波向的上下大幅振荡, 角度相差大约20°。
4.3.2 差值分析
进一步分析波浪滑翔器和波浪浮标间的波向数据差值, 并绘制差值曲线如图15所示。
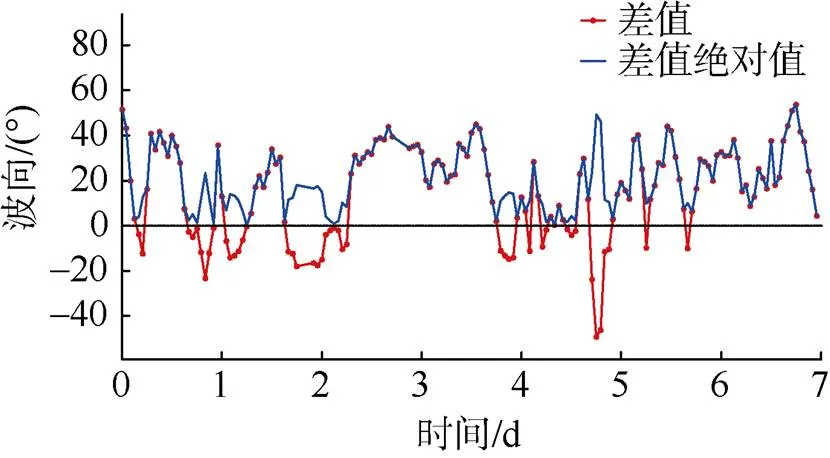
图15 波向差值曲线
波向差值最大为53.63°, 平均差值为21.64°, 平均差值与波浪浮标观测的波向比值的百分比为15%, 波浪滑翔器和波浪浮标间关于波向的观测结果存在较大差值。
波向由计算浮体受到的加速度方向得到。通常波浪浮标为圆球形, 不具备航向保持及转向能力, 因此能更加精确地反映真实的波向。
然而因波浪滑翔器特殊的浮体结构及自身较强的航线保持和自主导航能力, 在随波运动的过程中, 其本体会在某一方向产生一定加速度, 其所观测的波向是本体加速度方向和真实波向的合方向。因此只有当波浪滑翔器本体加速度方向和真实波向重合时, 波浪滑翔器所观测的才是真实波向; 当本体加速度和真实波向不重合时, 其观测的波向需要经过一定的算法修正才能得到真实的波向。
波浪滑翔器的本体加速度方向(WD)与观测的波向(OD)之间存在5种对应关系, 即:
1) WD>OD, 差值小于180°;
2) WD>OD, 差值大于180°;
3) OD>WD, 差值小于180°;
4) OD>WD, 差值大于180°;
5) WD与OD重合, 差值为180°和0。


图16 波向几何关系
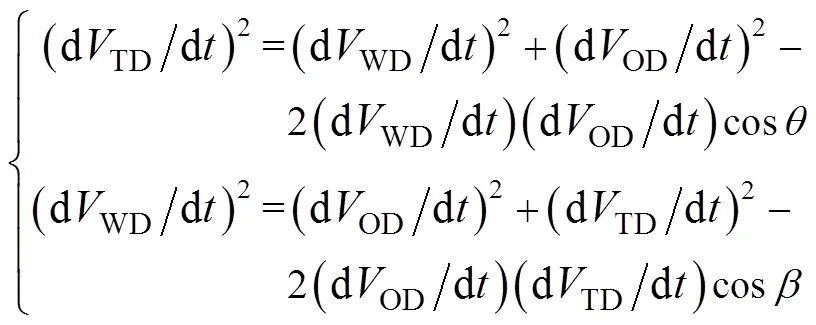
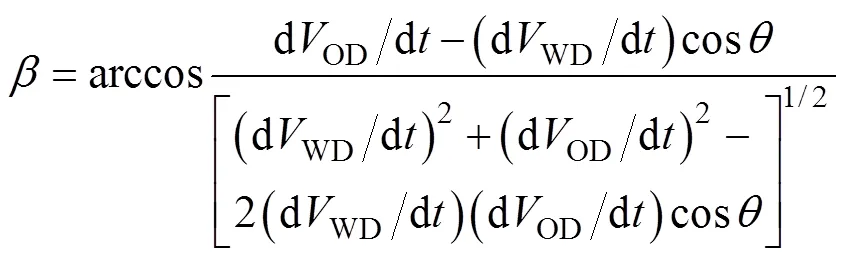
根据角度关系, 真实波向为
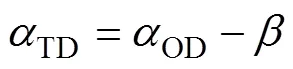


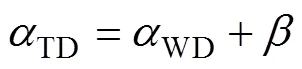
5) WD与OD重合, 差值为0, 真实波向即为观测波向, 当WD与OD差值为180°时, 真实波向为WD和OD中较大的那个所代表的方向, 即:

4.3.3 小结
由波向相关性和差值分析可以知道, 波浪滑翔器与波浪浮标对波向的观测数据有很高的一致性, 数据相关性极高, 达到0.921 8。但因波浪滑翔器本体的航向保持和导航能力, 使得其观测的波向数据与波浪浮标观测的存在一定差值, 但波向差值可通过算法进行修正。由此说明, 针对波向的观测, 波浪滑翔器具有很好的随波性, 经过波向修正后, 波浪滑翔器能够较为真实地反应波向的变化, 运用波浪滑翔器进行波向的观测是可行的。
有关波浪滑翔器和波浪浮标波向观测的部分特征数据如表4所示。
4.4 波数分析
4.4.1 相关性分析
分别绘制波浪滑翔器和波浪浮标关于波数的对比曲线, 如图17(a)所示。根据式(7)计算波浪滑翔器和波浪浮标关于波数的相关系数, 绘制相关性分布图如图17(b)所示。

表4 波向相关特性参数
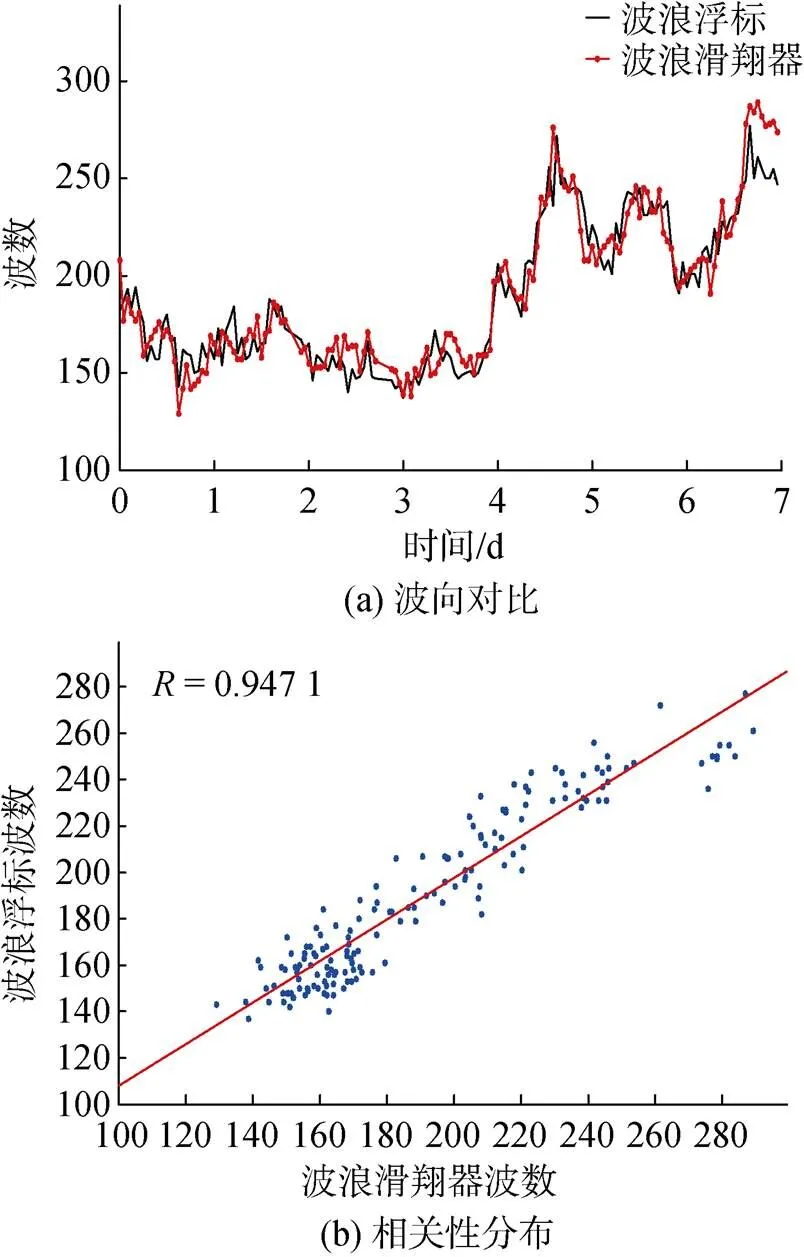
图17 波数对比曲线及相关性分布
由图17可知, 波浪滑翔器和波浪浮标关于波数的观测, 波数分布曲线大致相同, 曲线重合度较高, 波数相关系数达0.9471, 相关性极高。
4.4.2 差值分析
进一步分析波浪滑翔器和波浪浮标间的波数差值, 并绘制差值曲线如图18所示。

图18 波数差值曲线
由波数差值分析和计算结果可知, 波数差值最大为40, 平均差值为9.99, 平均差值与波浪浮标观测的波向比值的百分比为5.3%, 波浪浮标观测的波数平均值为189.8, 波浪滑翔器观测的波数平均值为191.3。因波浪滑翔器对波周期的观测稍小于波浪浮标, 使得波浪滑翔器随波的响应速度稍快于波浪浮标, 导致波浪滑翔器长期观测的波数均值稍多于波浪浮标, 然而差值并不大, 仅为1.5。波周期的观测与波高相关, 因此导致波浪滑翔器和波浪浮标间产生波数差值的根本原因在于“蓝鲸”波浪滑翔器测波传感器的偏心安装方式, 在影响波高观测的同时影响了波周期的观测, 进而影响了波数的观测。如同波高差值的消除方法一样, 波数差值亦可通过调整测波传感器的安装位置予以消除。
4.4.3 小结
由波数相关性和差值分析可知: 针对波数的观测, 波浪滑翔器和波浪浮标相比, 观测数据一致性较高, 数据相关性极高, 达到了0.95。虽然所观测的波数间存在一定差值, 但可通过调整测波传感器的安装位置予以消除。由此说明, 针对波数的观测, 波浪滑翔器具有很好的随波性, 能较为真实地反应海面波数情况, 运用其进行波数观测是可行的。有关波浪滑翔器和波浪浮标关于波数的相关特性参数如表5所示。
4.5 总结
由波浪滑翔器和波浪浮标关于波高、波周期、波数和波向的相关性及差值分析结果可知, 波浪滑翔器随波运动时具有较好的随波性, 能够较为真实地反映出波高、波周期、波数及波向特征。其中波高的平均相关系数为0.912 7, 波周期的平均相关系数为0.9217, 波向的相关系数为0.921 8, 波数的相关系数为0.947 1。波高平均差值为0.095 m, 波周期平均差值为0.468 s, 波向平均差值为21.64°, 波数平均差值为9.99个。总体来看, 波浪滑翔器具有很好的随波性, 利用波浪滑翔器进行波浪观测是可行的。

表5 波数特征参数
波浪滑翔器和波浪浮标间关于波浪信息观测的数据对比如表6所示。
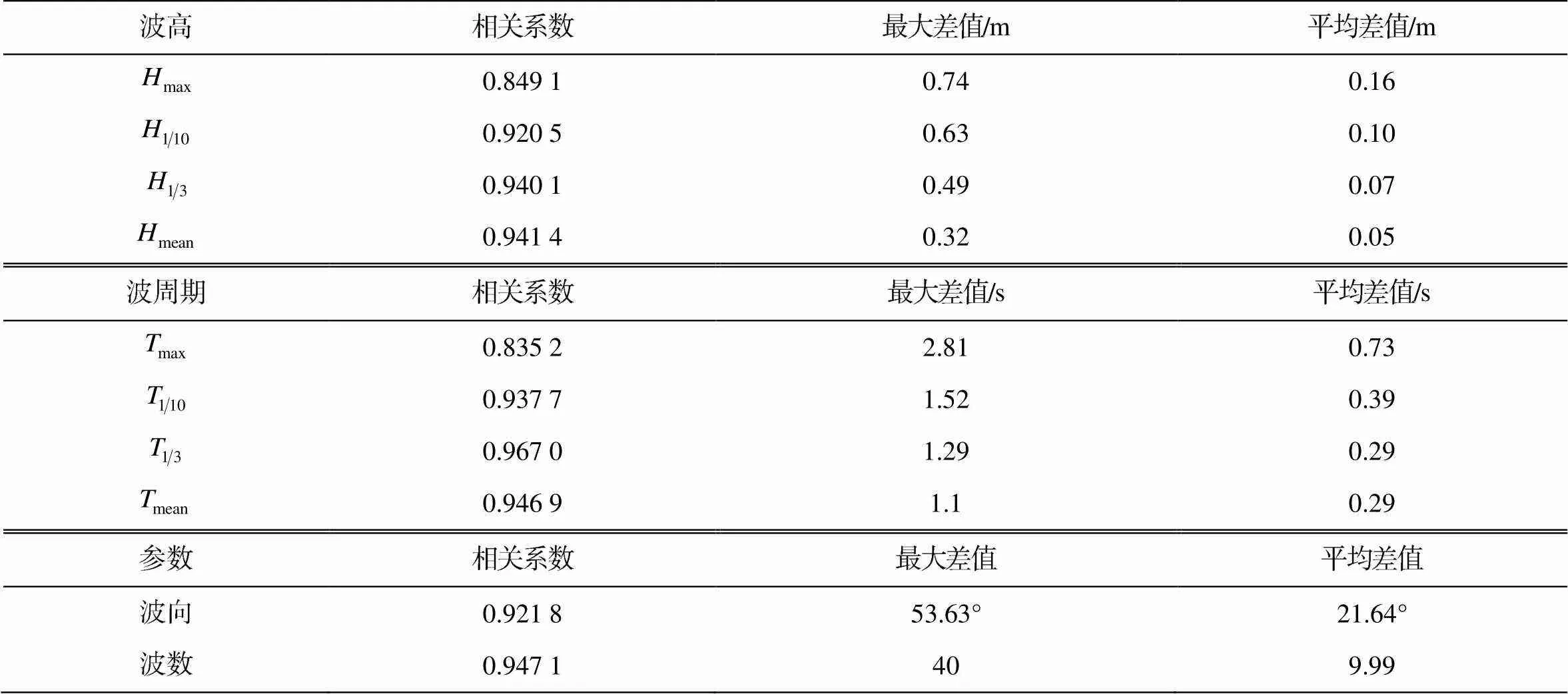
表6 波浪数据对比
5 结束语
文章开展了基于波浪滑翔器的测波技术研究,设置了波浪滑翔器和波浪浮标关于波浪观测的对比试验, 并对波浪滑翔器和波浪浮标间关于波高、波周期、波向和波数进行了相关性和差值分析。由分析结果可知, 波浪滑翔器和波浪浮标相比, 观测数据一致性较好, 相关性极高, 差值较小。总体来看, 波浪滑翔器具有很好的随波性, 可用于波浪观测。然而, 因波浪滑翔器本体的航向保持和自主导航能力, 导致波浪滑翔器与波浪浮标观测的波向间存在较大差值, 但差值可通过波向差值修正算法进行修正。后续将对波向的修正算法进行仿真和试验验证, 并基于验证结果对波向修正算法进行优化, 以期提高波浪滑翔器观测波向的准确性。
[1] Manley J, Willcox S. The Wave Glider: A New Concept for Deploying Ocean Instrumentation[J]. IEEE Instrumen- tation & Measurement Magazine, 2010, 13(6): 8-13.
[2] Willcox S, Manley J, Wiggins S. The Wave Glider, an Energy Harvesting Autonomous Surface Vessel[J]. Sea Technology, 2009, 49(1): 29-31.
[3] Daniel T, Manley J, Trenaman N. The Wave Glider: Enabling a New Approach to Persistent Ocean Observation and Research[J]. Ocean Dynamics, 2011, 61(10): 1509-1520.
[4] Olson R A. Communications Architecture of the Liquid Robotics Wave Glider[J]. IFAC Proceedings Volumes, 2012, 45(5): 255-259.
[5] Carragher P, Hine G, Legh-Smith P, et al. A New Platform for Offshore Exploration and Production[J]. Oilfield Re- view, 2014, 25(4): 40-50.
[6] Fitzpatrick P J, Lau Y, Moorhead R, et al. A Review of the 2014 Gulf of Mexico Wave Glider ® Field Program[J]. Marine Technology Society Journal, 2015, 49(3): 64-71.
[7] Bingham B, Kraus N, Howe B, et al. Passive and Active Acoustics Using an Autonomous Wave Glider[J]. Journal of Field Robotics, 2012, 29(6): 911-923.
[8] 秦玉峰. 波浪能滑翔器工作原理及应用研究[C]//海洋开发与管理第二届学术会议论文集. 苏州: 《海洋开发与管理》杂志社, 2018: 105-113.
[9] 杨燕, 张森, 史健, 等. 波浪动力滑翔器海洋环境监测系统[J]. 海洋技术学报, 2014(1): 109-114.Yang Yan, Zhang Sen, Shi Jian, et al. Wave Glider Marine Environmental Monitoring System[J]. Journal of Ocean Technology, 2014(1): 109-114.
[10] 李小涛, 王理, 吴小涛, 等. 波浪滑翔器原理和总体设计[J]. 四川兵工学报, 2013(12): 128-131.Li Xiao-tao, Wang Li, Wu Xiao-tao, et al. Principle and System Design of a Wave Glider[J]. Journal of Sichuan Ordnance, 2013(12): 128-131.
[11] 桑宏强, 李灿, 孙秀军. 波浪滑翔器纵向速度与波浪参数定量分析[J]. 水下无人系统学报, 2018, 26(1): 16-22.Sang Hong-qiang, Li Can, Sun Xiu-jun. Quantitative Analysis on Longitudinal Velocity and Wave Parameter of Wave Glider[J].Journal of Unmanned Undersea Systems, 2018, 26(1): 16-22.
[12] 孙秀军, 王雷, 桑宏强. “黑珍珠”波浪滑翔器南海台风观测应用[J]. 水下无人系统学报, 2019, 27(5): 562-569.Sun Xiu-jun, Wang Lei, Sang Hong-qiang. Application of Wave Glider “Black Pearl” to Typhoon Observation in South China Sea[J]. Journal of Unmanned Undesrsea Sustems, 2019, 27(5): 562-569.
[13] 左其华. 现场波浪观测技术发展和应用[J]. 海洋工程, 2008(2): 124-139.Zuo Qi-hua. Advances and Applications of Ocean Wave Measurement Technology[J]. The Ocean Engineering, 2008(2): 124-139.
[14] 刘国栋. 波浪浮标系统设计与测波方法研究[J]. 科学技术与工程, 2011, 11(35): 8805-8809.Liu Guo-dong. Research on Wave Buoy System Design and Wave Measurement Method[J]. Science Technology and Engineering, 2011, 11(35): 8805-8809.
[15] Gryazin D G, Staroseltsev L P, Belova O O, et al. Inertial Measurement Unit of Waverider Buoy. Development and Test Results[J]. Gyroscopy and Navigation, 2015, 7(3): 239-246.
[16] Desouky M A, Abdelkhalik O. Wave Prediction Using Wave Rider Position Measurements and NARX Network in Wave Energy Conversion[J]. Applied Ocean Research, 2019, 82(1): 10-21.
[17] Kashino R, Ethier T, Phillips R, et al. TRIAXYS™ Acoustic Doppler Current Profiler Comparison Study[C]// Oceans Conference. Washington USA: IEEE, 2005: 1-8.
[18] 赵江涛, 顾季源, 张东亮, 等. 海洋观测浮标摇摆姿态视频测量方法及试验分析[J].电子设计工程, 2019, 27(15): 179-183.Zhao Jiang-tao, Gu Ji-yuan, Zhang Dong-liang, et al. Attitude Measurement and Experimental Analysis of Marine Submersible Buoy based on Video[J]. Electronic Design Engineering, 2019, 27(15): 179-183.
[19] Cao F F, Shi H D, Li M D, et al. Simulation of the Power Take-off System for a Heaving Buoy Wave Energy Converter[J]. Journal of Ocean University of China, 2020, 19(3): 497-504.
[20] 郑珊珊, 孙金伟, 齐勇, 等. SBF3-2型波浪浮标载体结构设计[J]. 山东科学, 2015, 28(2): 11-17.Zheng Shan-shan, Sun Jin-wei, Qi Yong, et al. Structure Design of the Carrier of SBF3-2 Wave Buoy[J]. Shandong Science, 2015, 28(2): 11-17.
[21] Maqueda M A, Penna N T, Williams S D, et al. Water Surface Height Determination with a GPS Wave Glider: A Demonstration in Loch Ness, Scotland[J]. Journal of Atmospheric and Oceanic Technology, 2016, 33(6): 1159-1168.
[22] Ngo P, Das J, Ogle J, et al. Predicting the Speed of a Wave Glider Autonomous Surface Vehicle from Wave Model Data[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014: 2250-2256.
[23] Smith R N, Das J, Hine G, et al. Predicting Wave Glider Speed from Environmental Measurements[C]//Oceans’11 MTS/IEEE Kona. Hawaii, USA: IEEE, 2011: 1-8.
1. 孙秀军, 李宗萱, 杨燕, 等. 波浪滑翔器波浪驱动速度与海浪参数映射关系研究. 2020, 28(5).
2. 桑宏强, 关海鹏, 孙秀军. 波浪滑翔器水下牵引机抗扰动性能研究. 2020, 28(4).
3. 孙秀军, 王力伟, 桑宏强. 波浪滑翔器水下牵引机滑翔动力分析. 2020, 28(3).
4. 桑宏强, 游宇嵩, 孙秀军. 波浪滑翔器网络版岸基监控中心设计. 2019, 27(5).
5. 孙秀军, 王雷, 桑宏强. “黑珍珠”波浪滑翔器南海台风观测应用. 2019, 27(5).
6. 桑宏强, 李灿, 孙秀军. 波浪滑翔器纵向速度与波浪参数定量分析. 2018, 26(1).
Research on Wave Observation Technology of Wave Glider
QIN Yu-feng1,2, QI Zhan-feng1, ZHANG Shuang1, HOU Er-hu1, LI Guo-fu1, FENG Zhi-tao1
(1. National Ocean Technology Center, Tianjin 300112, China; 2. Key Laboratory of Marine Environmental Survey Technology and Application, Ministry of Natural Resources, Guangzhou 510300, China)
At present, wave observation is mainly based on wave buoys for fixed-point observation, and few studies have been conducted on wave observation in navigation by using new ocean mobile observation platforms such as wave glider. The feasibility, method and capability of wave observation by using wave glider “Blue Whale” are studied in this paper. The structure, working principle and wave observation method of wave glider “Blue Whale” is introduced, and a comparison test on the basis of analyzing the different wave observation principles of wave glider and wave buoy is established. Based on the test results, the difference and correlation of the wave height, wave period, wave number and wave direction between the wave glider and the wave buoy are analyzed. The existence mechanism of the difference value is analyzed, and the theoretical basis of eliminating the difference value and correcting the observed data of wave glider is provided. According to the test analysis, compared with that of the wave buoy, the wave data of the wave glider has higher coincidence degree, smaller difference value and a high correlation. The average correlation coefficient is above 0.9 and the data quality is highly reliable. The accuracy of wave data observed by wave glider is verified, and the feasibility of wave observation by wave glider is proved.
wave glider; wave buoy; wave feature
TJ630; P715.5
A
2096-3920(2021)02-0135-12
10.11993/j.issn.2096-3920.2021.02.002
秦玉峰, 齐占峰, 张爽, 等. 波浪滑翔器测波技术研究[J]. 水下无人系统学报, 2021, 29(2): 135-146.
2020-05-15;
2020-06-08.
自然资源部海洋环境探测技术与应用重点实验室开放基金课题(MESTA-2020-B016); 天津市自然基金青年项目(18JCQNJC08700); 国家自然科学基金(4200060803); 国家重点研发计划(2017YFC0305902).
秦玉峰(1990-), 男, 硕士, 工程师, 主要研究方向为海洋移动观测平台技术.
(责任编辑: 杨力军)
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
军民两用技术与产品(2021年7期)2021-10-13
垂钓(2021年5期)2021-05-31
垂钓(2019年2期)2019-09-10
高中时代(2017年7期)2018-02-24
南方农业·下旬(2017年8期)2017-10-23
兵器知识(2017年10期)2017-10-19
科技与创新(2014年8期)2014-07-17
航空知识(2002年12期)2002-12-20