
基于六自由度平台的电动助力转向系统(EPS)试验仿真分析*
2021-05-17 15:02郑晓东朱留存
汽车实用技术 2021年8期
郑晓东,朱留存,2,3*
(1.北部湾大学机械与船舶海洋工程学院,广西 钦州 535011;2.北部湾大学先端科学技术研究院,广西 钦州 535011;3.扬州大学信息工程学院,江苏 扬州 225127)
前言
电动助力转向系统的助力特性曲线都是通过对不同车型不同工况的实验数据进行拟合的方法来确定[1],这样获取试验数据的周期长,研发成本高,需要复杂的数学计算且精度不高,同时在复杂的车况下实验员安全隐患增大。电动助力转向系统试验平台是为了解决实验人员无法在现有条件的基础上研究汽车在极限工况下或其他工况下汽车的动态特性响应以及在车速、负载、 路面参数变化时对转向系统的影响,因而无法获取EPS的最优控制策略和控制的问题[2]。常见的电动助力转向系统试验仿真平台只能模拟汽车单一工况下的转向动态特性,而无法模拟出汽车其他工况下的转向特性,当需模拟其他工况时还需对试验平台进行改造,然而具有六自由度的电动助力转向系统(EPS)试验仿真平台则完全可以避免上述情况,这样有助于缩短试验周期,减少成本,同时保证实验人员的安全。
1 六自由度电动助力转向系统(EPS)试验仿真平台
电动助力转向系统(EPS)可以说是转向系统的第四代产品,其改善了前几代转向系统低速行驶时不灵便和高速时不稳定的缺点[3-4],电动助力转向系统采用电动机作为助力装置,其控制装置根据方向盘上传来的角度信号、转矩信号和发动机上的转速信号,再根据助力表格确定电动机输入电流大小和方向,从而使转向系统达到合适的助力效果[5]。助力表格的主要内容就是在驾驶员方向盘角度和转矩的作用下,在任何工况下电动助力转向系统对应的所需输出的助力转矩,也就是助力电动机所需的电流大小和方向。EPS系统的关键部件主要有角度传感器、转矩传感器、车速传感器、助力电动机、减速机构和电控制单元(ECU)等[6-7]。在不改变电动助力系统主要结构分布的情况下,通过增加路面模拟平台,设想了一种试验仿真平台,用来模仿实际情况下,在路面(转矩)和驾驶人员方向盘作用下获得电动助力转向系统所对应的助力电流等参数,从而在保证驾驶员在安全驾驶的情况下,获得优异的驾驶感。
该试验仿真平台的关键部件主要有角度传感器、伺服放大器(AMP)、伺服阀、液压马达、液压缸、齿轮齿条箱、转向轴等,该系统机械结构采用由六个液压缸构成的平台,这样做的目的主要是在既能承受平台和汽车的重量下,还能真实地模拟出在路面等因素作用下,电动助力转向系统的真实情况。六自由度电动助力转向系统(EPS)试验仿真平台示意简图如图1所示。
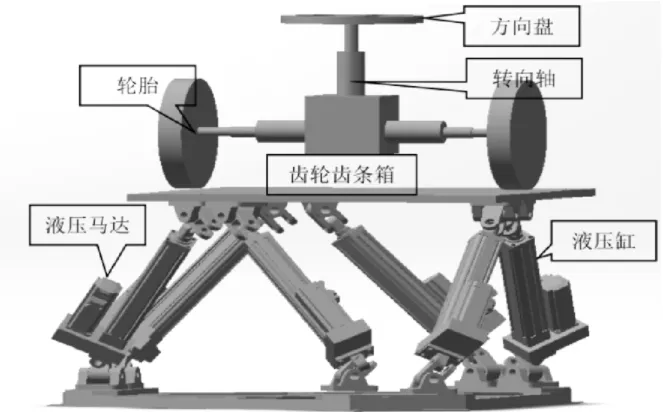
图1 六自由度电动助力转向系统试验仿真平台示意简图
2 六自由度电动助力转向系统(EPS)试验仿真平台模型
该试验平台的工作原理是当方向盘转动时,角度和转矩传感器在将信号传递给电动助力转向系统控制单元的同时,也将其信号传递给试验平台控制单元,试验平台控制单元接收该信号以及需要模拟的车况、工况后,通过其自身的算法输出信号,通过液压马达控制液压缸从而准确地模拟出路面状况,齿轮齿条箱把轮胎受到的路面转向阻力矩通过转向轴上的转矩传感器,电动助力转向系统控制单元在得到转矩信号后,在满足角度、路感等参数要求下,通过一定的运算分析就得到了助力转矩和助力电流的大小和方向。其试验仿真平台原理图如图2所示:
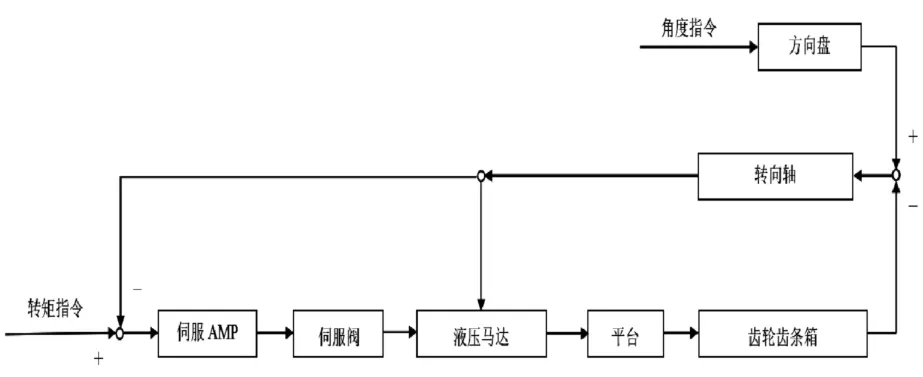
图2 六自由度电动助力转向系统(EPS)试验仿真平台原理图
2.1 角度输出器
众所周知汽车的转向都是靠方向盘来控制的,在该模型中我们利用角度输出器来代替方向盘,角度输出器模型包括角度单位电压和回转角一些术语和参数,而模型中也省略了其他术语。该模型考虑了角度输出器角度单位电压和方向盘所转动的角度(回转角),忽略了由于摩擦和元器件其他自身因素所产生的影响。角度输出器模型的计算公式(1)所示:

式中:E是输入电压;Kp1是角度单位电压;Ө是回转角。
2.2 伺服AMP
伺服AMP也称为伺服放大器,假设其是一个理想的放大器,没有功率损失和时间滞后。伺服AMP仅仅提高伺服阀电流,以满足其更高的电流需求。为了满足伺服阀的需要,确定了输入电压和输入电流的无量纲常增益(Ka1)或伺服抵抗值(R1)。用两者的比值来调节输入电压和输入电流,使其达到伺服阀的要求,数学公式(2)所示:

式中:i是输入电流,Ka1是输入电压和输入电流的无量纲增益,R1是伺服抵抗值。
2.3 伺服阀模型
伺服阀建模考虑其本身的特性,该模型主要是利用了其输出流量(Q)与其各参数之间的关系构建的。该模型所特有的参数有:伺服阀增益(Kv1)、伺服阀定时数(Tv1)、伺服阀流量压力系数(C21)、伺服阀出入口压力差(P)以及与液压马达有关的伺服马达内部泄漏油压差系数(C31),伺服阀模型计算公式(3)所示:

2.4 液压马达模型
对于液压马达建模可以说是本系统的重中之重,也是一大难点,由于液压马达牵扯的因素比较多,且比较容易受到外界因素的影响,一旦有哪方面环节做得不到位,将会产生很大的实验误差,对于该模型选取了一些比较重要的参数:液压马达油路油压系数(K1)、液压马达每转所输送的容量(Dm1)、液压马达输出扭矩(T)、液压马达的扭矩容量(Km1)以及液压马达惯(Jm1)和粘性抵抗系数(cf1),基于它们之间的关系构建了液压马达的数学关系表达式。
液压马达模型计算公式(4)(5)所示:

假设回转角与液压马达惯量、输出扭矩以及自身与粘性抵抗系数存在数学关系表达式(6):

2.5 齿轮齿条箱、转向轴
齿轮齿条箱是一种把旋转运动转化为直线运动的传动装置,假设其是一个理想装置忽略摩擦,能量损耗等因素对其的影响,其模型就可以简单地用一个增益来表示;转向轴在系统中只起到传动作用,故也参考齿轮齿条箱模型用一个增益来表示。
六自由度电动助力转向系统(EPS)试验仿真平台仿真模型如图3所示:
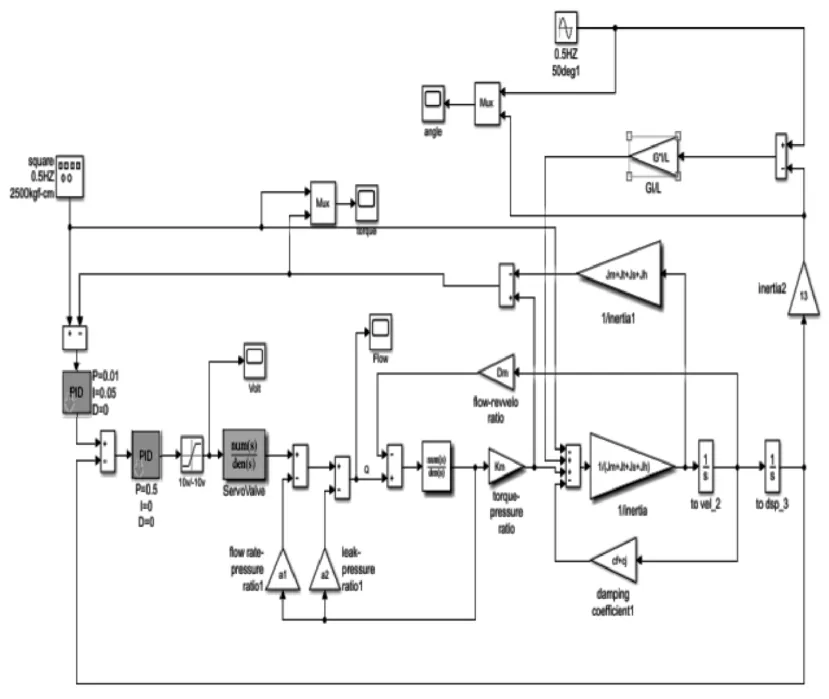
图3 六自由度电动助力转向系统(EPS)试验仿真平台仿真模型
3 基于Matlab 的仿真分析

图4 电动助力转向系统(EPS)方向盘转动角度
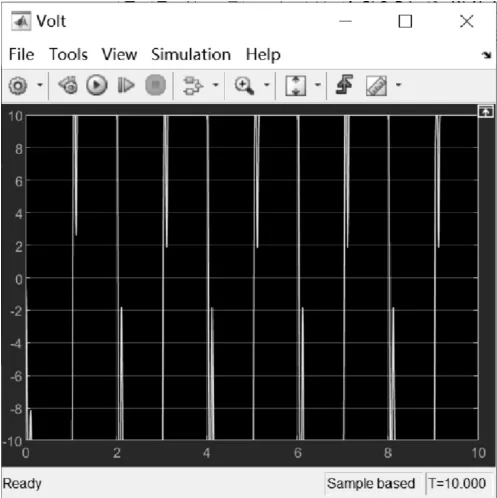
图5 电动助力转向系统(EP)角度输出器输入电压

图6 电动助力转向系统(E)S助力电流
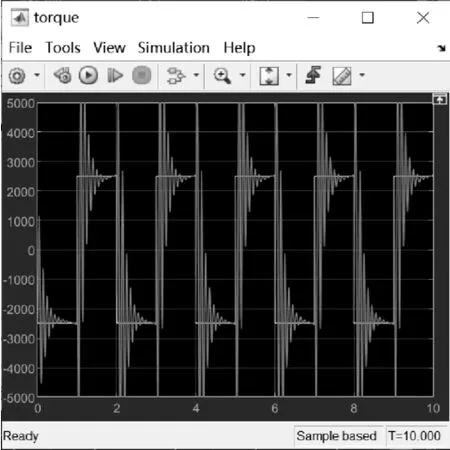
图7 电动助力转向系统(PS)助力转矩
通过上面的分析,我们得到了六自由度电动助力转向系统(EPS)试验仿真平台仿真模型。在模型中使用了Simulink中的PID的控制方法对伺服阀进行控制,从而对液压马达进行控制,在对液压马达进行了泄漏和摩擦等因素的补偿的同时,增加了一个从转向轴模型到液压马达模型和路面转矩输入的反馈,使其更精确。当在正常路面以及正常车况下时,对方向盘施加一个正弦输入信号进行仿真,就得到了所需的实验数据,电动助力转向系统(EPS)试验仿真平台仿真结果如上图所示。
当需得到其他工况、车况下电动助力转向系统的助力转矩、助力电流时,只需改变输入信号和部分参数,使其与相应的工况、车况相对应,就可得到所需的数据,例如在泥泞路况下,其试验仿真结果如下图所示:
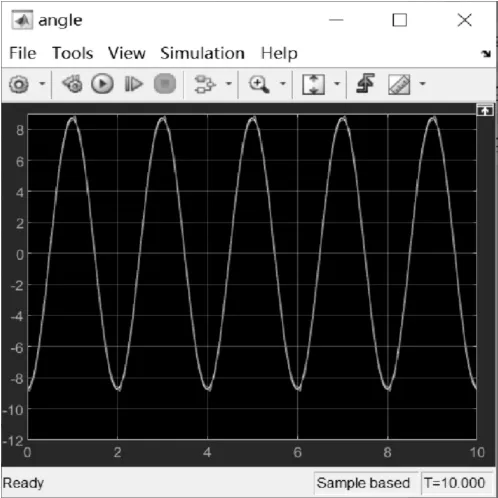
图8 泥泞路况下电动助力转向系统(EPS)助力转矩

图9 泥泞路况下电动助力转向系统(EP))角度输出器输入电压
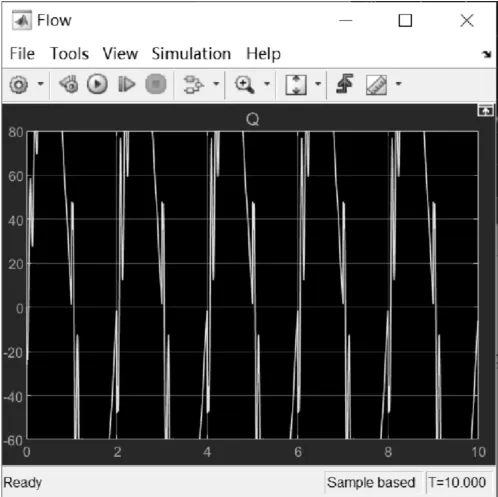
图10 泥泞路况下电动助力转向系统(E)S助力电流
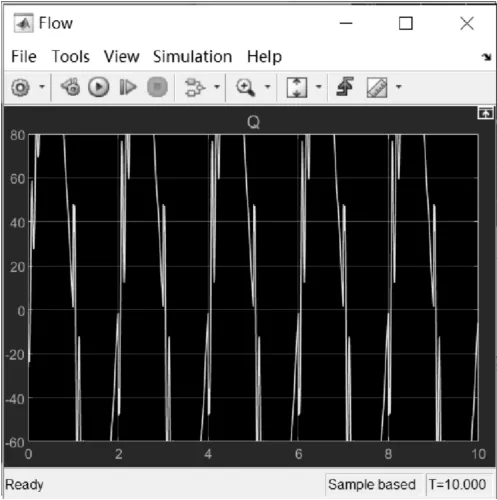
图11 泥泞路况下电动助力转向系统(PS)助力转矩
4 结论
六自由度电动助力转向系统(EPS)试验仿真平台的使用,可以使汽车开发设计工程师在较少的经济预算下、极短的时间内获得各种类型的汽车在各种真实模拟情况下的实验数据,这样有利于减少经济成本,提高开发周期,同时也在很大程度上提高了电动助力转向系统(EPS)的安全系数,利用Simulink构建电动助力转向系统(EPS)试验仿真平台的仿真模型,该方法在验证设计思路的同时也避免了复杂的数学计算,从而节约电动助力转向系统(EPS)试验仿真平台开发成本和时间。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年14期)2022-07-30
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
中国应急管理科学(2022年2期)2022-05-23
化学教学(2022年4期)2022-05-07
防爆电机(2022年2期)2022-04-26
作文周刊·小学三年级版(2020年24期)2020-07-17
电机与控制学报(2018年9期)2018-05-14
棋艺(2016年4期)2016-09-20
