人机工效在载人潜水器布局设计中的应用
2021-05-18 06:18叶聪徐伟哲刘帅
西北工业大学学报 2021年2期
叶聪, 徐伟哲, 刘帅
(1.中国船舶科学研究中心, 江苏 无锡 214082; 2.深海载人装备国家重点实验室, 江苏 无锡 214082)
载人潜水器是为了满足我国及国际海底资源勘探和开发、开展深远海科学考察、深海考古等迫切需求研制的水下装备。载人潜水器能将人送达水下或者海底,充分发挥人在现场直接观察、取样和测绘的优点,以便及时发现和决策,有效地执行精细作业任务。自2002年以来,我国研制完成首台大深度作业型载人潜水器蛟龙号,创造了7 062 m的下潜记录。在此基础上,研制出的4 500 m级深海勇士号载人潜水器,实现了95%的国产化率,进一步提升了我国载人深潜核心技术及关键部件自主创新能力。2020年11月10日,我国最新研制全海深载人潜水器奋斗者号,在马里亚纳海沟成功下潜至10 909 m,创下了中国载人深潜的新记录。载人潜水器是一个牵涉多学科的复杂人-机-环系统,其布局设计不仅决定了潜水器的主尺寸、重量、航速、功能等重要指标,还对潜水器维护性、作业效率、舒适性等有着直接影响。因此载人潜水器布局设计中的人机工效应用受到了越来越多的重视,人机工效设计的优劣将影响到潜水器运维效率。
我国载人潜水器的人机工效学研究起步相对较晚,在蛟龙号研制之前主要是围绕潜艇开展,包括狭小环境中潜艇人员生理和心理研究[1-2]、人机界面和人机交互研究[3-4]、舱室环境对人员作业的影响研究[5-7]等。近年来随着我国载人潜水器的研制成功,国内已有众多高校、研究所参与载人潜水器人机工效研究。包括潜航员工作负荷研究[8]、空间舒适性复合评估方法研究[9]、作业绩效和人因失效概率研究[10-11]、潜航员岗位要求研究[12]、载人潜水器座椅设计研究[13],基于模糊层次综合评估方法的布局优化[14],基于疲劳特性的布局优化研究[15]等。由于实际工程问题通常情况复杂,以数学模型进行求解的过程较为困难且难以合理的简化,因此现有研究存在最终计算结果与实际工程设计难以结合的问题。
载人潜水器从布局设计时就应考虑到后续制造、检测、总装、试验、运营和维护等方面的人-机-环相互作用、相互影响,人机工效学的设计思想应贯穿载人潜水器的整个研制过程。本文从载人潜水器研制工作中的实际工程经验出发,从载人潜水器的设备布局设计和载人舱内布局设计两大方面阐述人机工效在载人潜水器布局设计中的应用。载人潜水器设备布局是在主尺度、起吊重量、布放回收、潜浮航行性能、作业能力等指标约束下,针对潜水器全艇进行布局。载人舱内布局是兼顾观察窗视野、舱内设备功能、人员舒适性等因素对潜水器载人舱开孔及舱内进行整体设计。
1 载人潜水器设备布局设计
1.1 设备布局原则
载人潜水器设备布局应满足以下原则:
1) 布置紧凑,在兼顾设备可维性并避免相互干扰的前提下,最大限度降低潜水器包络体积;
2) 将设备尽量都布置在有限的主体线形内,减少附体阻力;
3) 确保设备功能和性能,预留升级和增改装的接口与空间;
4) 为复杂操作提供辅助和便利,设备的日常操作维护便捷;
5) 为作业工况提供可量化的优化设计。
1.2 设备布局分区
设备布局分区是在综合考虑稳性、维护性、作业需求、电磁兼容等因素的基础上,对潜水器零部件和设备布置位置进行划分,见图1。
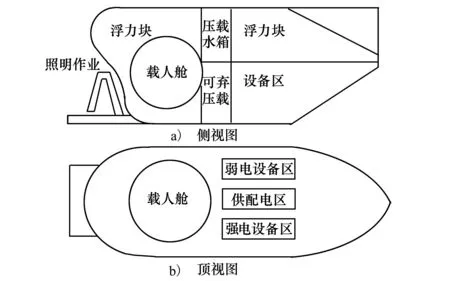
图1 载人潜水器设备布局分区
潜水器首部为照明作业区,主要布置采样篮、机械手、作业工具及照明灯。载人舱布置在照明作业区后方,综合设计载人舱、观察窗、采样篮及机械手的相对位置,保证潜航员能正常完成潜水器操纵和作业。潜水器重心位置布置压载水箱和可弃压载,保证压载水箱注排水以及可弃压载抛弃时,潜水器姿态不变。潜水器上半部分布置浮力块,提高潜水器浮心,增加潜水器稳性。下半部分布置大部分设备,设备拆装、检修和维护时,只需要打开潜水器外部的轻外壳就能方便地进行。中间供配电区安装潜水器蓄电池,在尾部去留段预留维护通道,可通过拆除维护通道内的轻外壳方便地进行充电、检修等维护操作。强电设备及弱电设备分别布置在两舷侧,比如配电罐、动力接线箱等均布置在潜水器左舷;水声通信罐、计算机罐、声学系统接线箱等均布置在潜水器右舷,尽量减少高电压、大电流、低频设备对声学设备的电磁干扰。控制声学设备的布置充分考虑其工作特性,确保其发射面不被遮挡。
1.3 可达性设计
可达性设计是指,设备在操作使用维护时容易接近。即设备能够看得见——视域可达;摸得着——实体可达;用得好——方便使用。设计能为复杂操作提供辅助和便利,使设备的日常操作维护便捷。以下结合几个载人潜水器设备设计实例进行阐述。
1.3.1 舱外扶手设计
我国已研制完成的大深度作业型载人潜水器布放回收指标均为:布放平均风速上限17 kn,最大风速上限21 kn;回收平均风速上限22 kn,最大风速上限27 kn。图2为蛙人为载人潜水器挂上拖曳缆及起吊缆的海试照片。

图2 载人潜水器挂缆照片
为保护蛙人靠近潜水器作业的安全,防止海浪拍击时蛙人撞击到潜水器或被海浪冲击时无法较好的完成挂缆任务,设计时在潜水器顶部的首部位置及中部位置安装扶手,帮助蛙人靠近潜水器并在海浪中固定好身体。同时,对起吊缆和拖曳缆的挂钩安装装置进行力学和结构型式的优化,让蛙人即省力又高效地完成挂缆任务。
1.3.2 耐压罐设计
由于潜水器在水下受到高压海水作用,载人舱外的非耐压设备、仪器均需放置在耐压罐中。耐压罐包括计算机罐、配电罐、声学罐、光纤罐及驱动罐等。耐压罐的设计除了应满足仪器设备安装的内部尺寸要求,还要满足电气系统接插件的安装要求以及设备的拆装维护需求。
耐压罐封头的形式一般有半球封头和平封头,见图3。在承受同等压力情况下,平封头的重量约为半球封头的1.1~1.2倍。但是半球封头的接插件呈放射状,相对于平封头其安装空间和操作空间却大大增加。因此在设计时,为了节省操作面空间,以及兼顾接插件拆装操作便捷,潜水器耐压罐的舷侧封头大多采用平封头。
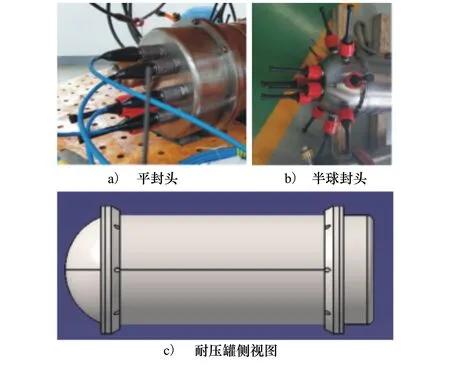
图3 耐压罐
1.4 舱外光环境设计
水下照明目前没有对应的标准、规范供参考和执行。规范CIE 8995:2002《室内工作场所照明》[16]中要求夜间照明、指示照明的照度不低于5 lx。结合载人潜水器实际作业需求,制定照度目标值:
1) 距潜水器3 m远、宽度7 m的垂直视域范围内照度最低值不小于5 lx;
2) 距潜水器7 m远、宽度7 m的垂直核心视域范围内照度最低值不小于5 lx;
3) 距潜水器3 m远、宽度7 m的水平视域范围内照度最低值不小于5 lx。
研究获取的深海海水水样,在实验室中计算得到深海海水透过率。将舱外灯光布局方案及灯光参数导入照明设计软件,计算灯具在空气介质中对应照明目标的照度。根据照度和光强的对应关系,灯具通过海水后的等效照度等于灯具初始照度和透过率的乘积。舱外照明灯光初始方案的等效照度结果见表1。
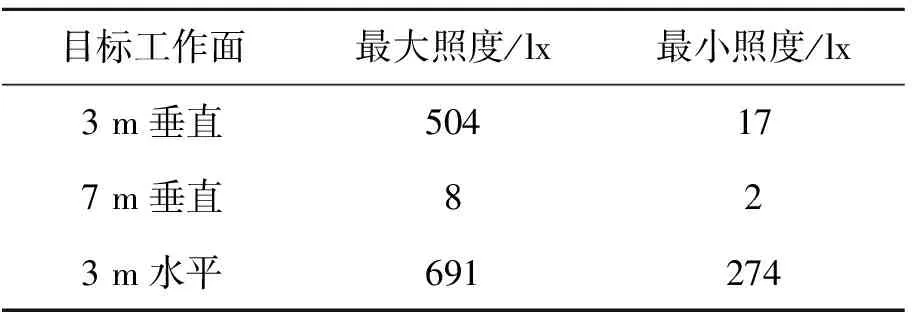
表1 舱外照明灯光初始方案等效照度
根据计算结果可知,7 m垂直目标工作面的最小照度为2 lx,小于目标要求的5 lx。因此考虑对当前照明方案进行优化,通过调整灯阵的安装角度来达到照明设计目标。优化结果见表2,各目标工作面照度均满足要求。
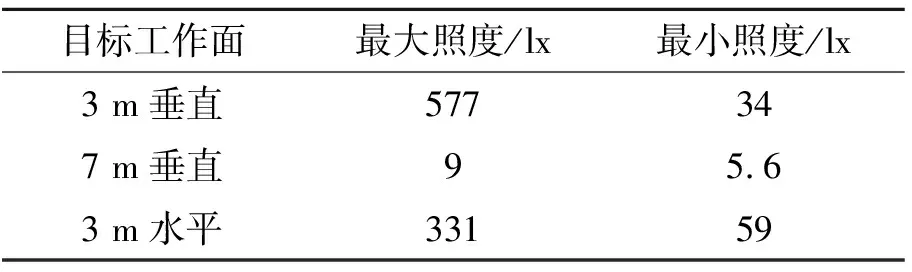
表2 优化后等效照度
2 载人舱内布局设计
载人舱是潜航员及乘客整个下潜作业过程中活动的空间,也是载人潜水器显控设备的安装区域。它是人机交互的重要平台,因此基于人机工效的舱内布局设计尤为重要。设计时应先确定观察窗、穿舱件盘、出入舱口的开孔位置、大小,再围绕着以上开孔进行舱内设备的布置。
2.1 载人舱开孔参数设计
人机工效在载人舱开孔参数设计中的应用包括:观察窗布局设计、穿舱件盘布局设计、出入舱口直径设计。其设计原则为:
1) 开孔要兼顾结构安全、人员正常工作及加工建造能力;
2) 观察窗角度设计应考虑视野重合度、采样篮和作业目标视野覆盖率及人体舒适性,达到综合最优;
3) 穿舱件盘位置应保证穿舱件盘内外两侧的接插件操作空间,同时尽量少占用舱内设备存放空间。
2.1.1 观察窗布局设计
观察窗的布局设计主要包括主观察窗下倾角、侧观察窗下倾角和主侧窗水平夹角。主观察窗下倾角是指主观察窗与水平面之间的夹角,主要影响潜航员舱外视野范围,采样篮视野覆盖率等;侧观察窗下倾角是指侧观察窗与水平面之间的夹角,主要影响乘客舱外视野范围;主侧窗水平夹角是指主观察窗和侧观察窗中轴线投影到水平面之间的夹角,主要影响观察窗之间的视野重叠范围。以上3个角度还影响到舱内人员的观察姿态。
观察窗下倾角较小时,舱内人员观察舒适度较好,但是潜水器附近区域以及采样篮的视野覆盖相对较差;反之,下倾角较大时,潜水器附近区域以及采样篮的视野覆盖相对较好,但是舱内人员观察舒适度较差。主侧窗水平夹角较小时,主侧观察窗视野重叠率高,有利于舱内人员协同观察和作业,但可能导致乘客离潜航员太近,影响其操作潜水器。
设计时,首先分析现有潜水器舱内布局,通过JACK软件的OWAS、RULA、CA、LBA等模块分析人体舒适度及空间干涉情况,确定舱内地板高度、人员观察时观察窗的最低高度[17],见图4。
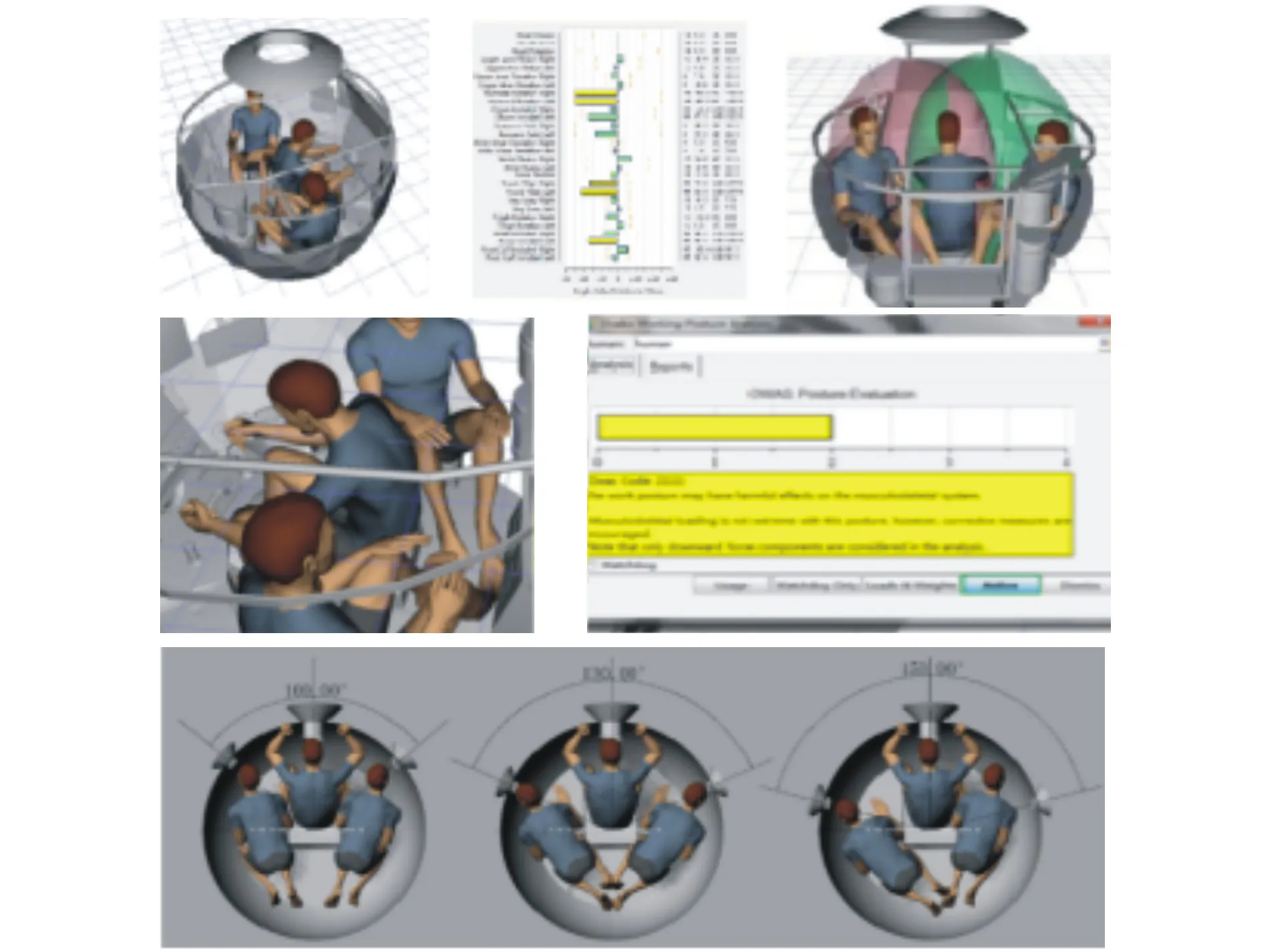
图4 JACK分析过程示意图
根据结构系统设计输入,以观察窗窗座焊缝间距离作为限制条件,在兼顾采样篮视野覆盖、机械手作业范围等情况下,尽可能增加观察窗之间的视野重叠范围,见图5。

图5 观察窗视野分析图
最后根据最终观察窗角度及地板高度构建载人舱三维模型,设计潜航员及乘客的观察姿态、休息姿态及姿态转换,通过虚拟建模验证设计合理性。
2.1.2 穿舱件盘布局设计
根据上一节确定的观察窗角度及舱内人员姿态,设计舱内设备空间,见图6。分析舱内功能分区,舱内正前方、左右舷及正后方空间为常用操纵面及设备存放空间,所以将穿舱件盘位置设计在载人舱左后方及右后方。同时,穿舱件盘在方便使用前提下,占用操作面空间及规整的设备存放空间应最少。所以穿舱件盘的上倾角应在焊缝距离允许的前提下取最大值。
2.1.3 出入舱口直径设计
为了保证结构强度,减少结构补强导致的重量增加,载人舱开孔应越小越好,即出入舱口直径应越小越好。经虚拟建模及潜水器舱口实物验证,人员出入舱口时,一只手在舱口上方,一只手蜷缩在胸前,肩膀尽量往前收缩,身体往蜷缩手一侧稍稍倾斜,以此姿态出入舱口所需空间最小。
人体数据库GB 10000-1988《中国成年人人体尺寸》及GJB 4856-2003《中国男性飞行员人体尺寸》中相关项目数据见表3。

表3 相关人体尺寸数据 mm
根据人机工程学设计原则,舱口尺寸应保证99%人群能够使用。对比上述2组数据,为保证人员能正常出入,以较大的数值进行计算。
舱口直径≥0.5×(最大肩宽)+0.5×(胸宽)=423.5 mm。设计时还应考虑,舱口保护罩以及人员衣服厚度的补偿量。
2.2 载人舱内设备布局设计
舱内设备布局设计原则:
1) 保证功能实现及人员安全;
2) 以人为中心,合理利用空间提高舒适性;
3) 设备协调统一,小型化、模块化。
2.2.1 狭小空间作业人体尺寸测量
受下潜深度、材料、制造工艺等因素影响,大深度载人潜水器载人舱直径一般不超过2.1 m。狭小空间内人体无法舒展,部分人体数据无法直接从现有人体数据库中获得,因此项目组收集和分析国内外载人潜水器舱内人员作业姿态,设计并测量人员作业和休息时的人体数据,用于指导舱内布局设计。
2.2.2 载人舱功能分区
舱内功能分区是在综合考虑作业要求、设备具体功能和人的生理、心理因素的基础上,对舱内设备和人员活动区域进行划分。
载人舱内分为主控区、低频设备区、生命支持及电控区、人员活动区等几个区域。主控区在载人舱内正前方,为潜水器的主要显控区域,综合信息计算机、航行控制计算机、视频监视器、指示灯、控制开关、操纵杆、机械手主手等设备布置在此区域。低频设备区在载人舱两侧乘客上方,为潜水器操作频率较低的机柜或设备布置的区域。生命支持及电控区在载人舱正后方,布置生命支持装置气瓶、供氧面板、电控面板及配电箱等设备。载人舱功能分区示意图见图7。
在舱内总布置设计过程中,参考GB/T 12985-1991《在产品设计中应用人体百分位的通则》,综合考虑本研究收集的载人潜水器舱内人员作业姿态人体数据,针对涉及潜水器功能和安全的尺寸采用上限值P99、下限值P1的双限值设计,针对非关键部件布局采用平均尺寸设计。根据人体尺寸数据对舱内设备布置进行对应设计,打造符合人体尺寸的舱内空间。

图7 舱内分区示意图
2.2.3 布局验证
潜水器研制过程中通常使用以下2种方式进行布局验证。一是使用人机工程学软件Delmia和JACK,构建载人舱三维模型和虚拟人体模型,然后通过软件的可达域、可视域、OWAS、RULA、CA、LBA等人机模块完成人机分析。这种方法周期短、成本低,能在设计初期快速评价舱内布局,提出修改优化意见。另一种是在初步设计完成之后,搭建样机,开展布局验证试验。这种方法能够让人员直观地体验到舱内布局的优劣,提出主观的优化意见,同时试验采集的生理指标和评分结果能够为方案优化提供数据支撑。图8为奋斗者号载人潜水器样机验证试验,通过测定记录实验对象的坐位压力分布、表面肌电(斜方肌、竖脊肌和股直肌)、静息脑电、心电(心率及心率变异性)、血压、大腿皮肤血流等生理指标,以及利用视觉模拟评分法(visual analogue scale,VAS)开展主观评价和状态焦虑评分,对乘客区域有支撑板和无支撑板2种舱内布局方案进行评估。评估结果为:①有支撑板时乘客臀部与座椅接触面积减小大腿血流量降低,下肢循环较差;②有支撑板时乘客股直肌、竖脊肌和斜方肌的平均频率、中位频率和功率峰值频率均有不同程度降低,说明有支撑板情况下姿态相对固定,能减少非任务性的体力损耗,从而提高作业效率;③有支撑板观察时,乘客更易焦虑,撤去支撑板后愉悦感、工作效率和总体舒适度均有提升。综合以上试验结果,设计可折叠支撑板(见图9),在乘客休息时收起支撑板增加活动空间提高舒适度,观察时打开支撑板减少肢体活动度,减轻肌肉疲劳,提高工作效率。
2.3 舱口出入梯设计
舱口出入梯作为潜航员从舱外进入舱内的承接部件,在布局设计时也需要统筹考虑。深海载人潜水器的载人舱一般被设计为球型,且出入舱口直径较小(通常不大于500 mm),同时出入舱口位置进行结构补强,其壁厚较大,可达到350 mm。根据实际现场试验测量,在潜航员通过梯子进出舱时,臀部及膝盖会受到舱口尺寸限制,每一踏步的高度约为150~230 mm,同时膝盖超出足尖平面,如果采用传统梯子,梯子踏板将与潜航员膝盖干涉(见图10);另外,由于载人舱内设备繁多、活动空间有限,载人潜水器进出舱梯子的支撑斜度通常无法低于70°,因此也无法通过降低梯子的倾斜角度来避开踏板与膝盖的干涉问题;同时,传统梯子的直线型踏板型式将占据一定出入舱口空间,影响人员进出。由于载人潜水器长期工作于风浪较大的海面,载人潜水器进出舱梯子还应满足:①方便拆装;②在颠簸的海样环境中固定稳固,以保证使用安全;③踏板的位置应在人的可视范围内,使用时不至于踏空。
因此,本研究设计专用梯子,来保证进出舱可达性(见图11)。特殊角度的挂钩固定在载人舱出入舱口围壁上,固定牢固且方便拆装;交错的踏板设置能让人在狭小空间内方便上下,腿部弯曲不受限制;防滑耳板设置防止在颠簸环境中,足部滑出踏板;踏板位置在人的可视范围内,使用时不会踏空;踏板上均粘贴一块防滑橡胶层,起到防滑效果。
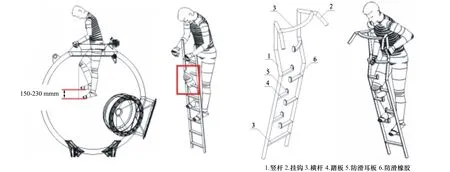
图10 踏步高度及膝盖干涉示意图图11 进出舱梯子等轴测视图及使用示意图
2.4 舱内光环境设计
中国船级社《潜水系统和潜水器入级规范》要求:潜水系统和潜水器应具有足够的正常照明和应急照明,正常照明的照度在65~80 lx范围内,便于居住人员观察仪表和进行必要操作。考虑到舱内人员阅读纸质文件等其他需求,参考GB/T 13379-2008《视觉工效学原则——室内工作场所照明》,规范中建议普通办公室和阅览室照度为300 lx;休息厅照度为150 lx。设计时舱内照明通过多光源综合布局方案,实现舱内各个仪表面板照度满足船级社要求65~80 lx,局部区域照度达到300 lx,满足人员认读纸质文件需求。
3 结 论
实际的人机工效在载人潜水器布局设计中应用,目标往往并非达到最理想的“安全、高效、宜人”,而是在限定条件下,综合多方面因素后,提高其“安全、高效、宜人”。载人潜水器的谱系化、智能化发展对其人机工效的应用也提出了更高的要求。希望人机工效的研究,为潜航员、乘客及潜水器运维团队营造一个更好的工作环境,为深潜任务的圆满完成提供保障。
猜你喜欢
科学与生活(2021年14期)2021-09-10
南都周刊(2021年3期)2021-04-22
中国船检(2019年6期)2019-11-29
船舶与海洋工程(2019年4期)2019-09-13
知识就是力量(2017年3期)2017-03-21
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12