
手杖式测树仪研制与试验
2021-05-20 09:37田艺冯仲科常晨
中国农业科技导报 2021年5期
田艺, 冯仲科, 常晨
(北京林业大学精准林业北京市重点实验室, 北京 100083)
森林资源是林地及其森林有机体的总称[1]。近20 年来,中国在全球绿地净增长中占据了25%的份额,中国绿地面积增加主要来自森林和农作物,其中包括42%的森林面积和32%的农作物面积[2]。截至2013年,中国森林面积和森林蓄积分别达到了2.08×108hm2和151.37×108m3,为此如何高效、准确地获取森林资源信息成为林业行业的热点问题[3-4]。而在森林资源调查中,观测装备是森林资源信息得以顺利获取的基础,是调查数据精确程度的重要保证[5-6]。我国传统森林调查长期沿用胸径尺或角规等工具,存在精度低、周期长、工作强度大及生长量难以准确获得等缺陷[7-9]。3S技术以其时效性、多元性和互联互通的特点为森林资源调查提供了新的思路[10],梁长秀等[11]利用电子经纬仪实现了树高、胸径(diameter breast height, DBH)的精度测量及存储数据导出。刘云伟等[12]基于全站仪可进行通信、自动记录和计算处理的功能,提出了一体化观测的理念。他们还利用三维激光扫描仪结合近景摄影测量实现了单木测树因子提取[13]。将测树超站仪与CCD相结合是一种固定样地定位和单木精测的方法[14-16]。随着智能手机和手机摄影测量软件的发展,冯仲科等[17]提出森林资源调查装备发展趋势已由3S主导的森林调查技术及各种便携式装备逐渐向精准化、智能化、轻量化及精细化方向发展。刘海洋等[18-19]研制了胸径和树高的手持式便携测量仪器,通过蓝牙连接手机实现了胸径的测量、编码、记录、编辑、存储和导出等功能。范永祥等[20]利用SLAM智能手机通过增强现实的人机交互方式构建了森林样地调查系统,实现了在手机上构建虚拟样地、每木检尺及林分参数提取等功能。虽然目前国内新型森林调查设备一定程度上解决了传统林业调查设备功能单一、精度差、效率低等问题,但是仍然存在新型设备价格昂贵、程序前后关联性强、操作步骤繁琐易错、常受天气和实地情况影响、稳定性不足等问题。
针对目前森林调查所存在的问题,本文以林业调查的实际需求为出发点,在满足胸径、树高测量精度的前提下,充分考虑其便携性、经济性、智能性和稳定性,设计研制了手杖式测树仪,在已知定长测杆长度及摄影中心到目标树木距离的前提下,通过智能手机拍摄树木胸高位置影像,经过图像处理和相应算法自动识别并计算树木胸径;通过截取的完整树高与所得胸径演算开展树高测量,实现森林观测装置的便携化、集成化、自动化、精准化、低成本化[21]。
1 材料与方法
1.1 试验区域概况
本试验主要在辽宁省辽阳市的中部地区,位于东经122.584°—123.683°,北纬40.705°—41.609°,全市行政区域面积共4 743 hm2,拥有中山、低山、丘陵、台地、平原多种地貌类型,地势由东南至西北逐步缓降,海拔最高为1 181 m。辖区内植被资源丰富,森林资源主要分布在东南部地区,主要树种为柞树(QuercusmongolicaFisch. ex Ledeb), 其次是落叶松(LarixolgensisHenry Korean Larch)、油松(PinustabuliformisCarrière)、刺槐(RobiniapseudoacaciaL.)、加杨(PopulusXcanadensisMoench)等。
1.2 硬件设计
手杖式测树仪由碳素定长测杆、防滑手柄、防滑杆头、智能手机、简易水准仪、MINI蓝牙遥控器、手机支架等组成。其中,定长测杆(图1)为可折叠式,折叠后长度为34 cm,重量为270 g,展开全长为130 cm(含防滑手柄、防滑杆头),可作为轻型登山手杖并配有专用腰包便于携带;杆身为碳素材质,硬度强且稳定性好,可以忽略测量时测杆形变带来的误差。为防止碳素测杆磨损和登山时防滑,在杆身末端套有耐磨型防滑杆头,在杆头末端1 mm处有磨损极限刻度,当杆头磨损达到该刻度时应及时更换。测杆前端依次装有直握式防滑手柄、MINI蓝牙遥控器、简易水准仪,方便调整手杖水平位置和姿态。
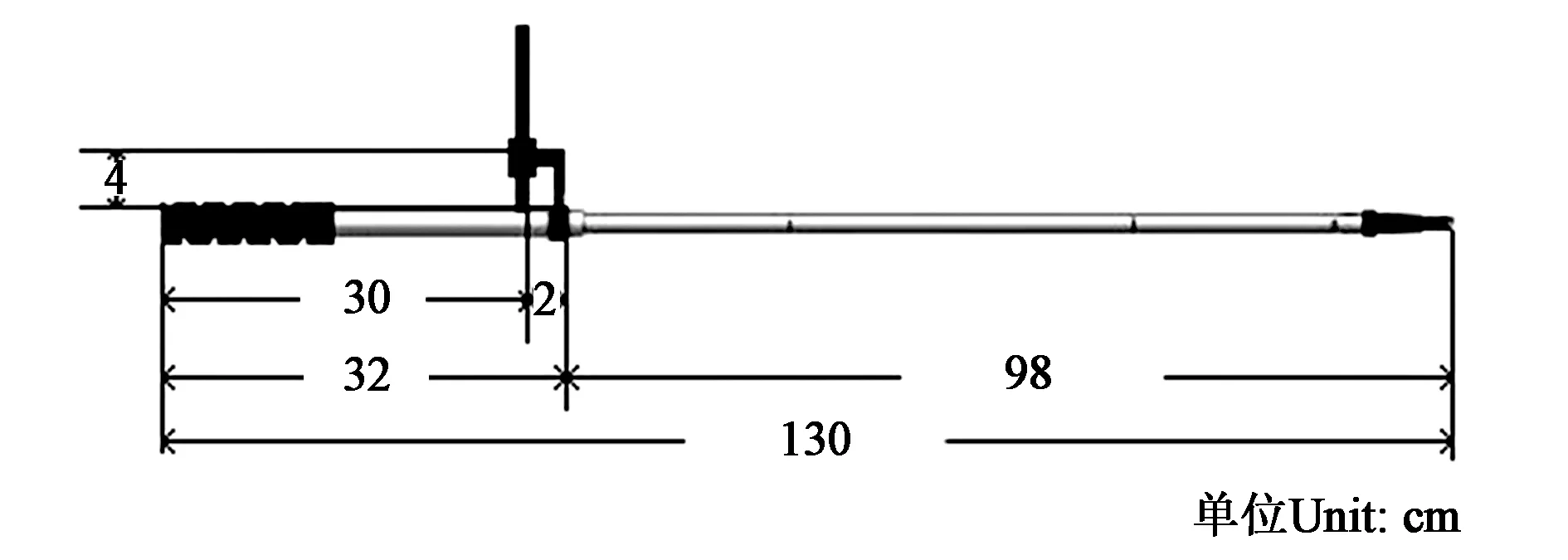
图1 手杖式测树仪
智能手机采用HUAWEI MLA-AL10智能手机,设备尺寸为151.8 mm×75.7 mm×7.3 mm,重量为160 g,硬件配备Qualcomm MSM8953(骁龙625)八核64位处理器和Adreno506图形处理器;该智能手机定位采用GPS、北斗双星定位系统,支持多种差分改正,定位精度1 m;手机相机后置1 600万像素摄像头,电池容量3 340 mAh,满电状态下可以连续作业10 h以上。手机支架由北京三鼎光电仪器有限公司进行加工,分为2与4 cm两节,均为铝合金材质并由球形闭锁转轴结构连接。为了保证手机摄影位置距离目标树木位置为1 m,将手机支架固定在测杆距杆头末端98 cm处。
1.3 图像处理
1.3.1灰度化处理手杖式测树仪树木胸径图像处理与胸径树高量测软件部分在Arduino系统开发环境下设计研发。首先利用不同方法对R、G、B三个通道色彩的树干正直影像进行灰度化处理,将彩色通道的影像转换为单色通道(0~255)的黑白影像,以减轻手机处理器负荷并加快图像处理速度达到降维简化的效果[22]。
①最大值法:选择R、G、B三个颜色通道的最大强度值作为灰度值(Y)进行图像灰度化。
Y=MAX(R,G,B)
(1)
②平均值法:将R、G、B三个颜色通道的强度值进行算术平均计算,计算结果作为灰度值(Y)进行图像灰度化。
(2)
③加权平均法:将R、G、B三个颜色通道的强度值根据一定的权值进行加权平均计算。
Y=0.299R+0.587G+0.114B
(3)
为了将树干信息与背景信息进行区别,需要对灰度化影像设定阈值进行分割,将图像像素点灰度值分为目标物和背景两类,其原理如下。

(4)
式中,f(x,y)为输入图像中坐标(x,y)的灰度值,g(x,y)为输出图像中坐标(x,y)的灰度值,T为分割阈值。
常用的阈值分割方法有OTSU法、迭代阈值分割法、最大熵阈值分割法等[23-25]。
1.3.2阈值分割①OTSU法:基于最大类间方差自动选择阈值的分割方法,该方法根据聚类的思想将图像按灰度值特性分为目标物和背景两类。基于最小二乘法先将最佳阈值设为T,再采用遍历的方法使得类间方差g达到最大,从而求得使目标物和背景灰度分割效果最好的阈值T,其算法如下。
(5)
(6)
μ=ω0μ0+ω1μ1
(7)
g=(ω0+ω1)(μ0-μ)2
(8)
式中,N0为目标物像素数,N1为背景像素数,x为图像宽度像素数,y为图像高度像素数,ω0为目标物所占整幅图像的比例,ω1为背景所占整幅图像的比例,μ0为目标物的平均灰度,μ1为背景的平均灰度,μ为图像的平均灰度,g为类间方差。
②迭代阈值分割法:基于逼近思想的阈值获取算法。首先,获得图像灰度值的最大值Ymax和最小值Ymin,设定阈值T0。
(9)
其次,根据阈值T0将图像分为目标物和背景,计算目标物区域的平均灰度值G1和背景区域的平均灰度值H1,计算新阈值T1。
(10)
根据阈值T1进一步分割图像;不断重复以上步骤n次至Tn收敛,即Tn=Tn+1,Tn即为迭代阈值法所求阈值。此方法是对双峰法的改进算法,一般适用于目标物与背景灰度值区别较大的情况。
③最大熵阈值分割法:基于信息熵值最大时的阈值选择方法,该算法具有较强的抗干扰能力。首先,设定一个阈值T(0~255),使用阈值T将图像分割为目标物B和背景O, 此时目标物信息熵HB和背景信息熵HO计算如下。
(11)
(12)
式中,pi为图像中灰度值为i的像素数量,pT为分割后图像灰度值小于等于T像素的数量。
遍历所有T的可选值,使得HB+HO获得最大值,此时T值即为最大熵的阈值分割点。
1.3.3连通域分析为了准确识别树干需要剔除背景中的斑点干扰区域,对阈值化分割影像进行连通域分析。该测树软件采用Two-Pass算法对影像进行处理,对图像进行两次扫描即可完成,其原理如下。
第一次遍历:对影像自上而下从左到右进行遍历,设影像中扫描点的灰度值为g(x,y),其中x为影像的横坐标,y为影像的纵坐标,若g(x,y)邻域点的灰度值都为0,则将g(x,y)标记为一个新的label(label+=1,g(x,y)=label);若g(x,y)邻域点的灰度值存在灰度值大于0的情况,将邻域点中的最小值赋予给g(x,y),即g(x,y)=MIN(Neighbors),若这些label值相同则认定其为相同的连通区域。
第二次遍历:继续对影像自上而下从左到右进行遍历,查询每一个扫描点g(x,y)的灰度值,若g(x,y)=255,则查找与label=g(x,y)属于相等关系的最小label值,将其值赋予给g(x,y),完成扫描之后,影像之中所有label值相同的像素便形成了同一个连通区域,即赋予了相同的强度值[26]。
1.3.4像素计算经过灰度化、阈值化分割、连通域标记之后提取得到完整纯粹的树干胸高处影像,影像中树干胸径处最左端像素点的灰度值应为0,通过对处理后影像中心轴从左向右遍历所有值,查找到第一个灰度值为0的点坐标n左(x左,y左)和最后一个灰度值为0的点坐标n右(x右,y右),由于遍历是在同一轴线上进行的所以此时y左=y右,而所提取的树木胸径则由中轴线上所有灰度值为0的像素点排列组成,所以目标胸径像素距离(N)计算如下。
N=|x右-x左|
(13)
1.4 胸径测量
通过手杖式测树仪瞄准胸高处拍摄树木胸高位置影像,经过影像处理后可提取树木胸径处像素距离N,而实际林业调查中需获取胸径实际距离D′,此时需对像素距离结合智能手机参数进行解算如图2所示,其原理如下。
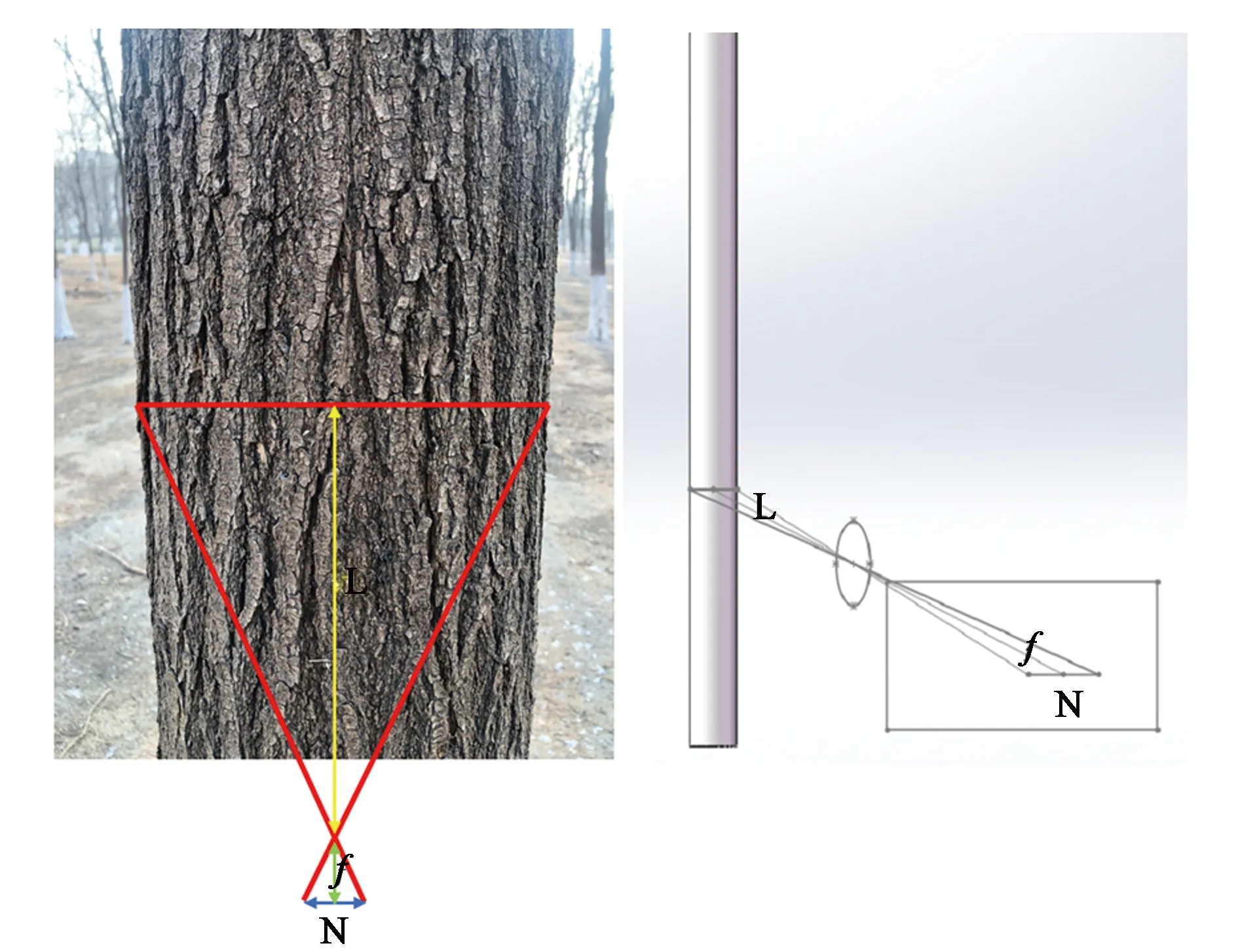
图2 胸径解算
(14)
式中,D′为结算后胸径值,单位cm;N为提取出的树木像素距离,单位pix;L为智能手机镜头至目标树的距离,单位cm;f为经检校后智能手机镜头定焦焦距,单位pix。
由于正直摄影时测算距离为镜头至目标树表面距离,所以测定出的D′并不是真实的树木胸径,如图3所示。D′为图中AB长度,为了准确解算目标树胸径设S为智能手机摄影点,O为树木胸径处的圆心,A、B为像素点提取长度,C为直线SO与圆的交点,d为圆的半径及树木半径,α为SA与SO的夹角,最终树木测量胸径值D为2d,单位cm,公式如下。
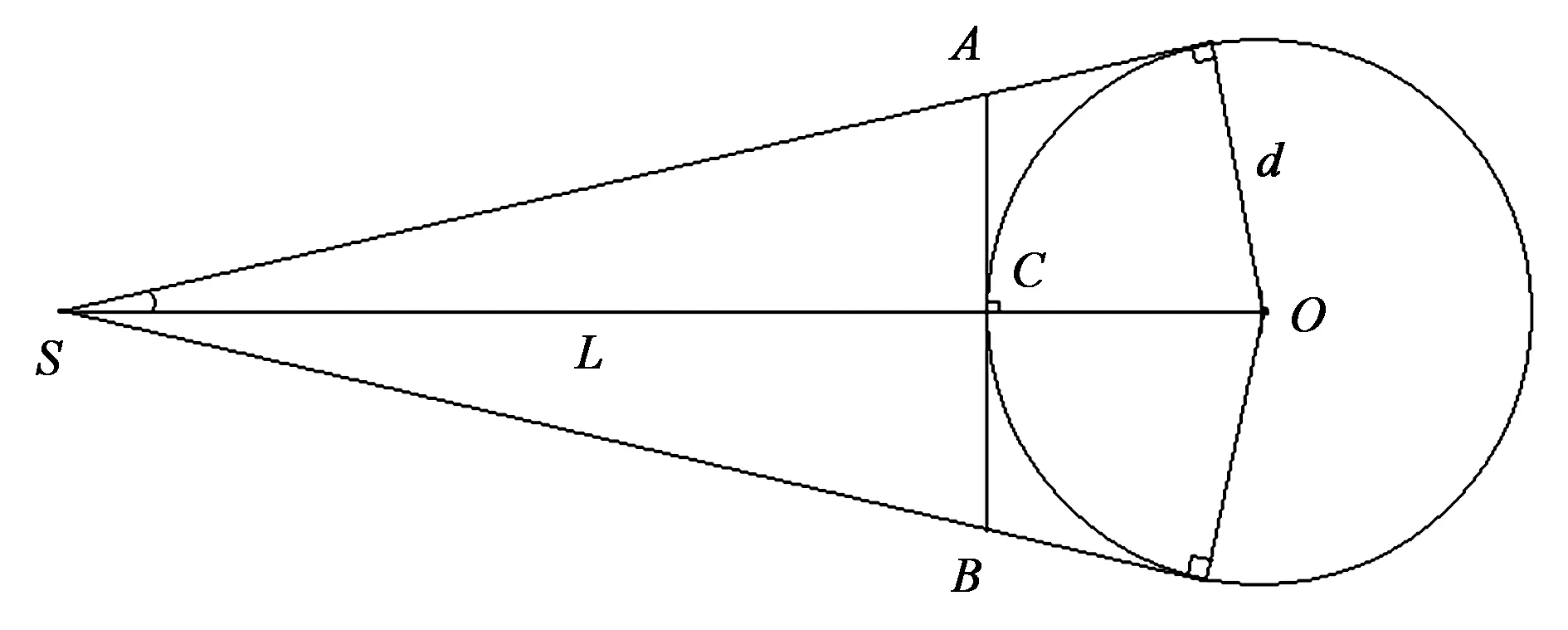
图3 实际胸径解算
(15)
带入化简计算树木半径。
(16)
1.5 树高测量
树高测量主要利用智能手机通过摄影测量原理进行测算,在完成胸径测量之后,使用智能手机对待测树木整体进行正直摄影,在获得树木完整影像的情况下对树顶、树底、树干胸高两侧进行手动标记,如图4所示。在影像像素坐标系中,设树顶坐标为(x1,y1),树底坐标为(x2,y2),树干胸高左侧坐标为(x3,y3),树干胸高右侧坐标为(x4,y4),则可计算树高的像素距离H(单位pix)和胸径的像素距离D(pix)。

图4 立木树高测量模块
(17)
(18)
(19)
式中,h为树木高度,单位m;d为树木胸径,单位cm。
1.6 误差分析方法
选取不同立地条件的253棵树木开展手杖式测树仪的功能测量实验,真实值使用胸径尺量。全站仪测量立木的树高的精度远高于不同目标的林业调查精度要求[27],使用NTS-391R10全站仪(无棱镜距离测量静的为±3 mm+2×10-6D,角度测量精度为±1″)测量树高真实值。通过所得测量值和真实值对比分析手杖式测树仪的测量精度,并根据中国森林调查现状,依据二类调查标准[28]对树高、胸径提出的3种误差等级(A类精度5 %,B类精度10 %,C类精度15 %)对该设备的测量精度进行分析。分别利用公式(20)~(24)计算参考值与测量值之间的偏差Bias、相对偏差Bias%、均方根误差RMSE、相对均方根误差RMSE%及决定系数R2作为设备测量精度评价指标。
(20)
(21)
(22)
(23)
(24)

2 结果与分析
2.1 图像处理结果分析
选择五棵不同的树种拍摄树干影像,在图像处理过程中分别用不同法进行阈值化分割,得到树干和背景分离的影像的像素点提取情况,如表1所示。与人工标记的实际像素点数量相比,最大熵阈值法所得影像的像素提取平均误差为6 pix;迭代分割法所得影像的像素提取平均误差为4.4 pix;OTSU法所得影像的像素提取误差为2.2 pix。如图5所示,最大熵阈值分割法和迭代阈值分割法对树干和背景的分割效果较模糊,周围细小斑点出现较多,背景过滤效果较差;OTSU法对树干和背景的分割较为清晰,背景的过滤效果较好,细小斑点出现较少,故本文选择OTSU法作为树木灰度图的阈值化分割算法。

表1 不同阈值分割检测的立木胸径像素距离
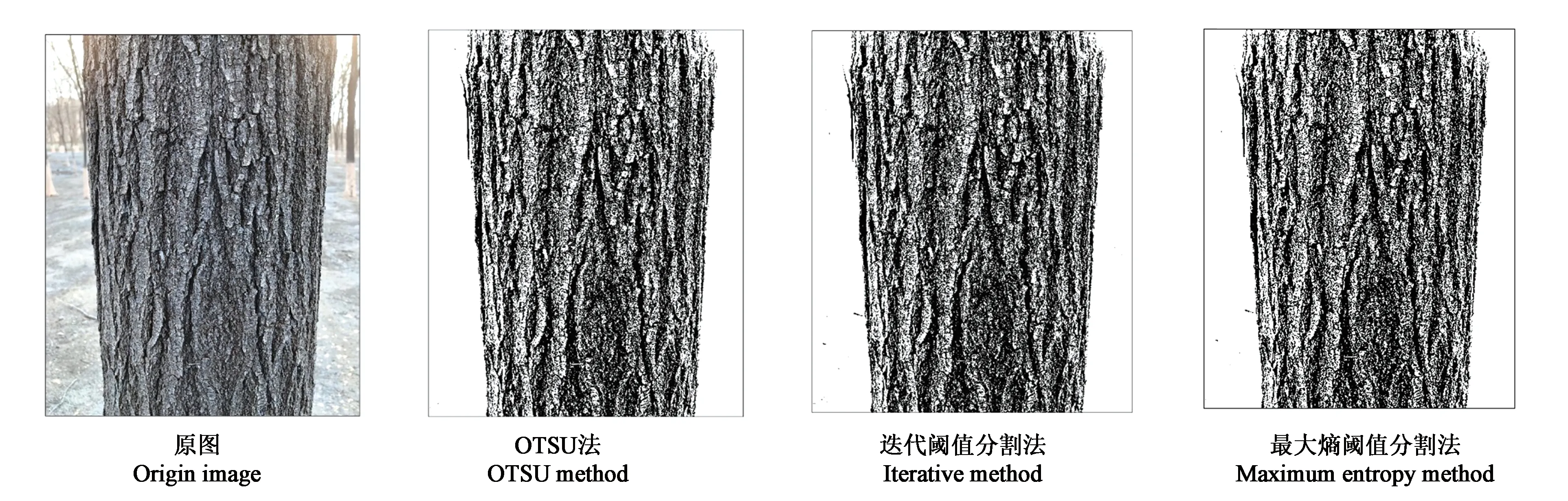
图5 不同阈值分割结果
2.2 胸径误差分析
本研究使用手杖式测树仪共获取253棵目标树的胸径值,并使用胸径尺量取对应目标树的真实胸径值作为参考。经过手杖式测树仪自动解算得到胸径测量最小值和最大值分别为4.7和45.1 cm;胸径尺量取的目标书真实值的最小值与最大值为4.5 和43.9 cm。经过胸径误差精度分析表明手杖式测树仪胸径测量偏差为0.29 cm,相对偏差为1.5%,均方根误差为0.7 cm,相对均方根误差为3.6%;胸径的测量值与参数拟合方程为y=0.985 64x-0.013 05,拟合直线的R2=0.993 4,如图6所示。胸径测量值自由度及均方误差方差分析显示,F(0.177)

图6 胸径测量值与参考值分布及拟合况
2.3 树高误差分析
在胸径测量的同时获取对应的树木树高测量值,树高测量值的最小值和最大值分别为5.26和20.06 m,使用全站仪测量全部目标树树高作为参考真实值,真实值的最小值和最大值分别为4.86和18.44 m。经过树高精度误差分析表明,手杖式测树仪树高测量偏差为0.48 m,相对偏差为4.2%,均方根误差为0.70 m,相对均方根误差为6.1%,树高的测量值与参考值拟合方程为y=0.921 32x+0.465 72,斜率为0.921 32,拟合直线的R2=0.979 5,如图7所示。结合表2树高测量值自由度及均方误差方差分析显示,F(2.798)

图7 高测量值与参考值分布及拟合情况
3 讨论
本文主要设计研发了手杖式测树仪,利用测树学、摄影测量学、机械加工学、机器视觉、影像处理等技术,在已知手杖式定长测杆长度(手机到树干的距离)和智能手机相机焦距的基础上对目标树进行拍摄获取胸径处影像进行灰度化处理。阈值化分割之后可以得到由树干和背景组成的黑白二值影像,由于树干的灰度值通常比背景的灰度值小,树干一般以大面积黑色区域呈现,而背景由于其复杂程度较高,往往呈现出杂乱的细小斑点区域,因此,通过连通域标记提取胸径处像素点数量,通过数据分析,使用OTSU法进行阈值分割效果最好,提取精度较高。本文利用OTSU算法进行图像分割,根据测杆和焦距形成的固定比例关系确定单个像素所代表的实际距离,结合三角函数原理最终实现树木胸径和树高的测量,并通过手机完成全部数据的记录、编码、编辑、储存、导出等功能。结果表明,使用OTSU法进行阈值分割效果最好,提取精度较高。测量实验结果表明,本文设计的手杖式测树仪的胸径和树高的测量值的相对误差均小于5%,满足二类调查A类精度要求[29],且成本适中、操作简单、方便携带,与传统林业调查方式相比该仪器单人即可操作,且测量速度更快,在保证作业精度的前提下节省了时间成本和人力成本,一定程度上提升了林业工作效率。
该设备在实际使用过程中仍有一些需要改进的地方,在长期使用过程中设备的稳定性存在一定的不确定性,未来需提高设备的集成度,增加设备稳定性。另外,在树高测量模式中必需拍摄完整的树木影像,本次实验选择的试验区域郁闭度较小基本可以满足实验摄影要求,但在实际工作中通常存在树木相互遮挡难以获取完整树木影像,在未来的研究中需进一步研究探索树高测量的方法。
猜你喜欢
湖南林业科技(2022年4期)2022-08-29
北京航空航天大学学报(2022年6期)2022-07-02
防护林科技(2021年3期)2021-09-12
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
决策探索(2019年1期)2019-03-19
小雪花·成长指南(2015年8期)2015-08-11
小雪花·成长指南(2015年8期)2015-08-11
小雪花·成长指南(2015年8期)2015-08-11
