面向无人机电力巡检航迹规划的语义服务方法
2021-05-20 06:51吴建灵吴建友潘科宇叶吉超
计算机工程与设计 2021年5期
季 伟,吴建灵,吴建友,潘科宇,叶吉超
(1.浙江省丽水市正阳电力建设有限公司 技术部,浙江 丽水 323020;2.国家电网丽水供电公司 技术部,浙江 丽水 323020)
0 引 言
近年来,利用无人机巡检作业保证了高空复杂环境下的电力安全,国家电网公司已将无人机巡检纳入输电线路精益化考核指标中。航线规划[1]作为无人机电力巡检的基础和前提,其目的是根据无人机巡检任务搜索最优路径。与其它应用领域不同,无人机电力巡检的航线规划在对电力设备位置检查的同时,还需考虑高空复杂环境下的干扰因素,现有通过位置制定航线的方法[2]忽略了环境信息的动态变化,使规划效率较低、航线导航不准,难以解决巡检精准性问题。动态环境下的航线规划主要提供了概率路标图[3](PRM)、扩展随机树[4](RRT)、粒子群优化[5](PSO)、Voronoi图[6]、智能学习方法[7,8]等方法,但这些方法应用于电力巡检的动态规划需要沿特定电力缆线排查和精细化设备巡检执行,其检测区域不同于平面搜索区域,因此较难适用于电力巡检的轨迹策略。
针对电力巡检的轨迹规划问题,文献[9]构建了一种用于无人机巡检航线规划的智能杆塔连通图,为智能规划提供数据支持;文献[10]利用规划区域内电力线走廊激光点云数据确定航迹位置点,实现巡检过程中对障碍物的规避;文献[11]研究了一种最小时间搜索的目标监测方法,应用于高空电力电缆的监测;文献[12]在研究改进RRT算法的基础上,提出一种在电力输电线路中适用于无人机的路径规划算法。但以上方法在实时规划线路上无法描述无人机感知器采集的信息,缺乏在线轨迹位置节点的语义扩展,不能反映在线环境信息,影响最佳飞行轨迹和巡检位置。
综上所述,从信息处理角度,提出一种面向无人机电力巡检航线规划的语义轨迹模式,目的是构建具有环境感知、航迹构造和语义策略图模型的语义服务应用,在netlogo[13,14]仿真平台上验证所提方法的有效性。
1 问题描述与框架设计
1.1 环境描述
(1)无人机属性及飞行参数
无人机在一定巡检区域W×L内飞行,不仅需要对巡检对象上升下降巡检,还需要对前后线缆的实时检测,同时受到包括环境障碍、碰撞规避、电磁干扰等干扰因素的约束影响。设系统为基于四旋翼的单体无人机,每台无人机都架构了相同的传感器和观测系统,采用文献[15]的方法计算飞行参数,通过加速器直接测量机体坐标下的水平移动速度为VU,最大偏角度为ω,有效探测距离为L,考虑无人机动态飞行时的角度和半径。
(2)巡检任务描述
无人机以VU的速度在巡检区域的水平和竖直方向飞行,如图1所示,所有的目标对象信息分布于未知环境区域中,设有NI个干扰因素(用圆形表示),巡检任务是对所在区域目标对象进行巡检,覆盖所有电力对象及对象附属实体。

图1 电力巡检环境区域描述
1.2 航迹语义特征表示
航迹的语义服务是被赋予了语义信息的轨迹结构,当无人机在空间位置进行巡检定位时,形成了大量的关于巡检位置的空间序列,由Stop序列集和Move序列集组成[16]。其中,Stop序列集表示为Stop_sq={Ωk,Ti,Ti+n}, 它是航迹巡检停留节点集合,Ωk表示第Ti至Ti+n时刻巡检的区域;而Move序列集Move_sq表示为连接两个Stop位置点之间的最大子轨迹。由于感知到具体实体对象时,需要根据环境感知推理的数据交换格式,在Stop序列集和Move序列集形成航迹可重构的特征点,以保证规划的精准性。其实时航迹特征点表示为
S={si|si∈λ∩∀Stopi(i∈[1,n])∩
(Stopi="tower"∩DStopi>d∩DθStopi>ω)}
(1)
式中:ω为偏角度,d为位置偏移距离阈值,对于航迹λ中任意采样点Stopi, 记DStopi为Stopi的位置偏移距离,DθStopi为Stopi的角度偏移距离。当采样点位置语义标签Stopi.label="tower"或DStopi>d或DθStopi>ω, 则Stopi定义为一个特征点si。
1.3 航迹规划语义服务框架
针对高空巡检动态环境下航线管控的背景特征和信息的不确定性质,将巡检航线规划框架分为环境感知模块、语义策略图模型和航迹构造模块。
(1)环境感知模块用于计算事件概率,根据语义模型触发航迹位置的语义空间计算为目标线路选择提供空间搜索方式,其功能主要包括特征点提取、区域划分和感知推理。特征点提取用于对大量航迹数据的位置点进行语义信息提取,形成Stop序列集和Move序列集;区域划分用于划分当前区域环境,形式化表示干扰因素区域划分、对象实体划分以及巡检关联比重计算;感知推理通过Jena[17]推理控件的数据交换格式,用于为无人机提供航迹变化所做出的位置、姿态和引擎等状态的服务,提供生成基于位置的语义连接,使特征点序列集加载了语义标签,包括基于Jena的数据交换和位置连接;
(2)语义策略图模型为基于OWL[18]的知识库,其用途为存储语义地图、环境及无人机系统状态,主要由规则推理、行为更新、功能维护等组成,主要包括环境态势库、行为控制库、历史航线库;
(3)航迹构造模块用于为无人机巡检航线提供路线搜索和选择机制,主要包括语义空间距离计算和强化学习的路径选择机制,使学习到的知识迁移至新的相似历史航迹中,并实时更新语义策略图模型,为航迹的构造提供语义应用服务。图2显示了面向巡检航线规划的语义服务框架,它是整个系统的底层架构。

图2 面向电力巡检的语义服务框架
无人机利用传感器获取信息开展巡检感知任务,进而生成行为规划以及关于位置的语义连接,并与语义策略知识库协同为规划模型,形成语义航迹,提供统一的数据规范。环境感知和航迹构造共同触发语义航迹模式,根据干扰区域进行语义空间距离计算和最优路径选择。可视化界面提供人机交互界面,研判无人机系统状态和航线规划;语义策略图模型作为形式化表示模型,为任务提供所需背景知识,刻画复杂环境下巡检航迹位置节点的因果关系,从而实时提供语义模式的航迹规划服务。
2 巡检航线语义感知模型
2.1 语义策略图建模
语义策略图模型O_strategy构建过程为:首先,获取传感器中的原始信息,生成行为控制库、环境态势库和历史航线库,构建相关的概念、属性以及实例。如图3所示,在语义策略知识库中,态势环境库是由无人机传感器和地面信息系统获取的环境信息数据,主要针对已构建的电力杆塔、线缆、变压器、闸阀、高压螺栓等可视化设备,还包括雨雪风等天气变化情况,并与空间数据平台postGIS[19]进行数据接口对接;行为控制库为无人机系统状态及其引擎、位置和姿态等行为控制,通过实例获取系统运行的参数,用扩展Move序列集和Stop序列集的语义信息;历史航线库用于存储或搜索历史巡检航线所记录的关键位置节点、障碍物规避位置节点以及航线路径的方向选择等历史线路构建信息。

图3 语义策略图模型设计
2.2 巡检区域空间划分

(2)
然后,在考虑干扰因素基础上,根据关联比重对巡检对象实体进行空间划分,由式(3)计算得

(3)

2.3 环境态势感知推理
区域划分根据特定的巡检需求和相关事务的特征位置对整个巡检区域做了空间划分,对于航线规划而言需根据已划分的区域,按照语义策略图对路径及位置进行研判,利用Apache Jena API[17]获取语义概念、实例,生成可识别的数据交换格式,其代码片段如下所示。
< PositionControl rdf:ID=“PosControl_1”/>
< tower rdf:ID=“tw_1”>
datatype=float”> electromagnetism=0.75
latitude
< fil2_1 rdf:ID=“flx”>
< coll rdf:ID=“flx”>
由代码片段可知,PosContr_1表示当前无人机位置控制状态的实例,has_Stop表示Stop序列集中的数据系数,根据序列集的语义推理扩展区域环境的“障碍干扰”概念集。从而确定该Stop位置上是否存在“电磁干扰(electromagnetism)”且电磁干扰系数为0.75时,选择路径方向“hasDirection”概念集下的具体经纬度位置;ObjContr_1为巡检对象可达的实例,flx表示卡尔曼滤波观测数据,0.67为系统噪声因素;coll为共位参数,0.54表示位置共位的参数量值,是对巡检航线的方位控制。
基于上述数据片段,设无人机的位置状态杆塔数据“tw_1”区域自定义规则connect连接关联杆塔数据“tow_2”区域,生成事实库cons_links。
String
rlex=“Constructs{ ?p_1:relates_To:Cryp_tography1}
Where”+”{{:tw_1?p_:tw_2}union{: tower_2?p_: tw_1}}” // 关联事件存储器
reo_1=newSails_Repositorys_1(new Query(new Store(),Query.SPARQL,rlex, “ ”))
代码中,cons_links描述OWL文件转化单个无人机在某状态下的关系,通过Jena遍历结点,可以较好保证语义策略本体的完备性和有效性。
3 巡检航迹语义构造
通过对巡检区域的环境态势进行语义感知推理后,生成了基于位置的语义连接,使特征点序列集加载了语义标签,而航迹规划的语义控制是对巡检区域内线路进行搜索选择,并提供连接语义策略知识库的接口。考虑航迹规划的最优性和实时性矛盾[20],采用语义空间距离为目标线路选择提供空间搜索的方式,通引入强化学习[21]的路径选择机制提高区域航迹规划的航线代价值,使语义巡检航迹达到期望最优。
3.1 语义空间距离
所提出的语义空间距离是将当前轨迹与语义策略图O_strategy 进行航线选择策略的一个计算方法,取决于语义距离和空间距离两个部分。其中,语义距离是衡量空间位置节点与巡检目标在语义上的距离。而空间距离是衡量O_strategy中空间顶点vCi与当前巡检位置节点q的欧式距离。
(1)语义距离。考虑某时刻t巡检某特征点位置信息q生成的Stop序列集和Move序列集,q的位置信息表示为vq, 可能匹配语义策略图O_strategy上的多个顶点vCi, 采用与vCi在O_strategy图上的最近距离来度量vq与vCi之间的语义距离,即为
(4)
其中,disO_strategy(vqi,vCi) 表示顶点vqi与vCi的最短路径加权距离,如果vqi与vCi不存在路径或者O_strategy中无q存在,则disO_strategy(vqt,vCi)=∞。
(2)空间距离。其O_strategy中空间顶点vCi与巡检位置节点q的欧式距离表示为
Span(vqi,vCi)=dis(vqi.Coor,vCi.Coor)
(5)
式中:Coor表示当前位置的坐标值。综合考虑语义距离和空间距离,使用以下公式对空间顶点进行排序

(6)
其中,α∈[0,1] 为平衡两种距离的权重参数,可以通过实验调整。在式(2)、式(3)计算巡检实体对象关联比重和区域的基础上,SemO_stragegy(vqi,v′Ci) 和Span(vqi,v′Ci) 用于对语义距离和空间距离进行特征位置点的k-means聚类[22],从而选择合适的路径作为航线规划的期望网络集合。
3.2 基于强化学习的路径选择机制
语义空间距离计算为巡检航线路径选择提供了依据,通过路径选择多个区域内特征位置节点的聚类,生成了一个与语义策略图网络相匹配的期望网络,为使巡检航线规划的信息要素达到最优,引入强化学习方法对航迹的路径进行选择,不断调整规划航线。采用该方法,可以利用语义空间计算结果提高较优航迹区域的信息要素浓度,降低较差航迹区域的信息要素浓度,有利于扩展巡检航线的语义搜索空间;另一方面,通过信息要素更新过程中的航迹评价作为奖励信号,对较优的路径进行奖励,提升航线规划的自适应能力。将期望网络设为S={S1,S2,…,SN}, 通过输出Q值波尔兹曼分布指导语义策略网络O={O1,O2,…,ON}, 以奖励信号π作为对航迹的评价值,其计算如式(7)所示
(7)
其中,τ为影响因子,QQi为指导网络Oi行动空间,而期望网络Si的信息要素均加载了语义标签用于计算语义距离,根据Si策略和Oi策略的交叉嫡计算信息素浓度系数,提高巡检的精确性和准确率[23]
(8)
式中:logπAMN(α|S;θ) 用于指导Si,Oi输出为监督信号,指导当前网络Si的行为向Oi靠拢,在减少航迹构造过程中信息要素衰减的同时选择最优路径。
3.3 航线构造方法
针对语义空间距离计算和基于强化学习的路径选择,为使航迹区域的信息要素浓度达到最优,提出了航线构造方法,具体算法如下所示:
航迹构造算法:
输入:语义策略图O_strategy,当前航迹λ及Stop序列集,最大偏角度ω和最大距离偏移阈值d
输出:结果构造航迹λ*
(1)获取当前无人机航线λ中位置采样点并初始化λ*, {}→O_strategy, |λ|→n, {}→λ*;
(2)λ*∪{Stop1}→λ*;
(3)StopiStopi+1→labelMove;//标记第一个采样点直接作为特征点向量
(4) while i (5) if 满足式(1)则获取特征点集合S; (6)S∪{si}→S构造特征点集合; (7) 对于特征点Si利用式(5)计算该位置的语义空间距离,即与语义策略图O_strategy的空间语义计算; (8) 根据式(7)计算si的航迹评价值; (9) 采用式(8)得出策略回归值计算信息素浓度稀疏 (10)sisi+1→labelMove用Move序列连接特征点; (11) end if (12)i+1→i (13) end while (14) returnλ* 本文以电力平台为数据背景,将任务区域设为W×L=1000 km×1000 km,由Voronoi图分解为600个子区域,每个子区域设有中心位置节点,4台同构四旋翼无人机飞行速度为每秒40 m,最大的偏角度为65°,观测距离为60 m,在netlogo平台上进行仿真实验验证所提出方法的有效性,采样周期为5 s。实验中对语义策略图中未出现的实例等不平衡现象,采取拉普拉斯平滑方法进行处理,并重复10次实验消除误差影响。 初始阶段无人机对区域环境信息未知,1台无人机从任务初始位置出发,对区域内拟定的13个电力杆塔进行飞行巡检,如图4所示,三角形代表当前杆塔,其通过线缆进行连接,阴影部门表示电磁干扰和树障干扰等因素,共有①至⑥部分。当机载传感器接收到任务信号时,当前无人机从001号杆塔开始巡检,不仅规划杆塔的三维特征点线路,还规划线缆的巡检位置。 图4 基于语义服务的电力巡检航迹规划结果 图4(a)为根据语义策略图构造的历史航线数据,其中每条航线均计算了对应航段的语义空间距离和赋予奖励信号的航迹代价值,为巡检航迹提供了数据基础;图4(b)显示了在该区域内运用本文方法生成的航迹规划结果,有效地规避了干扰区域,在飞行航迹规划和干扰因素之间取得了良好的平衡。 (1)航线代价分析[23] 对于巡检航线规划的不断调整和重构,使无人机局部线路选择在强化学习过程中不断迭代更新,采用航迹代价进一步说明本文方法在电力巡检航线规划的性能。航迹代价反映了无人机巡检航迹的优劣程度,由沿航迹飞行代价分量Wf和受到干扰因素代价分量Wm决定,其评价指标如下 (9) 式中:γ∈[0,1] 为代价分量的权重系数,L(Route) 为特征点航迹段的航程,d(Sti,Sti+1) 为采样特征点集任意两点的距离,航段 (Sti,Sti+1) 与干扰因素的距离越近则干扰代价越大,航段中受到干扰的部分航程越长。而W本质上反映了无人机沿航线Route飞行时所消耗代价的大小,W越小则航迹性能越优,反之则航迹性能下降。 如图5所示,通过与概率路标图(PRM)方法[3]和快速随机扩展树(RRT)[4]方法比较,本文方法在每代最优值会出现小幅度的波动,这样有利于跳出局部最优的情况,在第16次迭代时收敛速度趋于稳定,适应值为0.60左右,这种良好的情况受益于基于强化学习的路径选择机制,该方法将航迹评价作为奖励信号对路径选择进行奖励,采用交叉嫡计算输出了稳定的监督信号;同时语义空间距离计算为每个特征点位置生成了一个与语义策略图网络相匹配的期望网络,为基于强化学习的路径选择提供了有效的信息要素。而PRM方法在第25代时才逐步收敛稳定,收敛速度较慢;RRT方法航线代价值变化虽然与本文方法相近,可以解决巡检航线规划的局部优化问题,但随着迭代次数的增加陷入了不稳定状态。 图5 航迹综合评价曲线 (2)巡检对象覆盖率分析[23] 如图6所示,随着三维特征采样点的规模不断增加,语义规划方法收敛所需时间也逐步增加,同时,语义规划方法的覆盖率也不断提高,通过比较分析巡检对象的覆盖率,当仿真结束时,PRM方法的巡检覆盖率为82.5%,RRT方法的巡检覆盖率为86.6%,本文方法的覆盖率达到92.3%,且优于其它方法,这是由于该方法在初始时提取了可重构航迹的特征点,并对巡检区域进行差异划分计算关联比重,体现了语义策略图模型对无人机巡检航迹规划的环境态势感知优势,从而提高了电力航线巡检覆盖效率。 图6 巡检对象覆盖率比较 结合研究内容研发设计了一个面向航线规划的语义服务模拟演示系统,在电力巡检中初步实验模拟,图形控制界面如图7所示。系统采用Visual Studio 2010和3D utility,地理数据源于丽水周边山区电力路线数字地图,通过protégé 中OWL SPARQL查询语言返回所有结果;考虑到安全性所有飞行情景按规定模式执行,实验环境下添加了干扰区域因素等外部环境状态。 图7 面向航迹规划的语义服务模拟演示系统 由图7可知,设定起始目标塔杆,无人机逐步检测当前的语义信息,首先划分区域获取特征点,在特征点位置上触发语义策略图并计算机语义空间距离,形成一个策略网络,将可视化特点上的显示所有位置信息,为高空电力巡线提供了丰富的可视化语义服务。 无人机电力巡检的航迹规划很大程度上取决于巡检对象位置的定位及其特征提取,在此基础上进一步获取语义分析的能力,与地面搜索方式的航迹规划不同,无人机必须在三维空间中进行运行以满足电力巡检实体的对象的需求。本文针对巡检环境要素需求和条件限制,提出了一种语义服务方法使无人机在满足航向速率和空速的条件下,通过语义策略图和强化学习方法可以有效判断飞行特征点及干扰因素,同时语义规划的航迹代价能够快速收敛并趋于稳定,巡检对象覆盖率达到90%以上,各项性能比其它方法较优。下一步将考虑在时间上减少规划时间,研究多无人机的方法解决电力巡检的语义服务问题,以进一步提高巡检效率和功能稳定性。4 实验分析
4.1 实验数据
4.2 航线构造分析
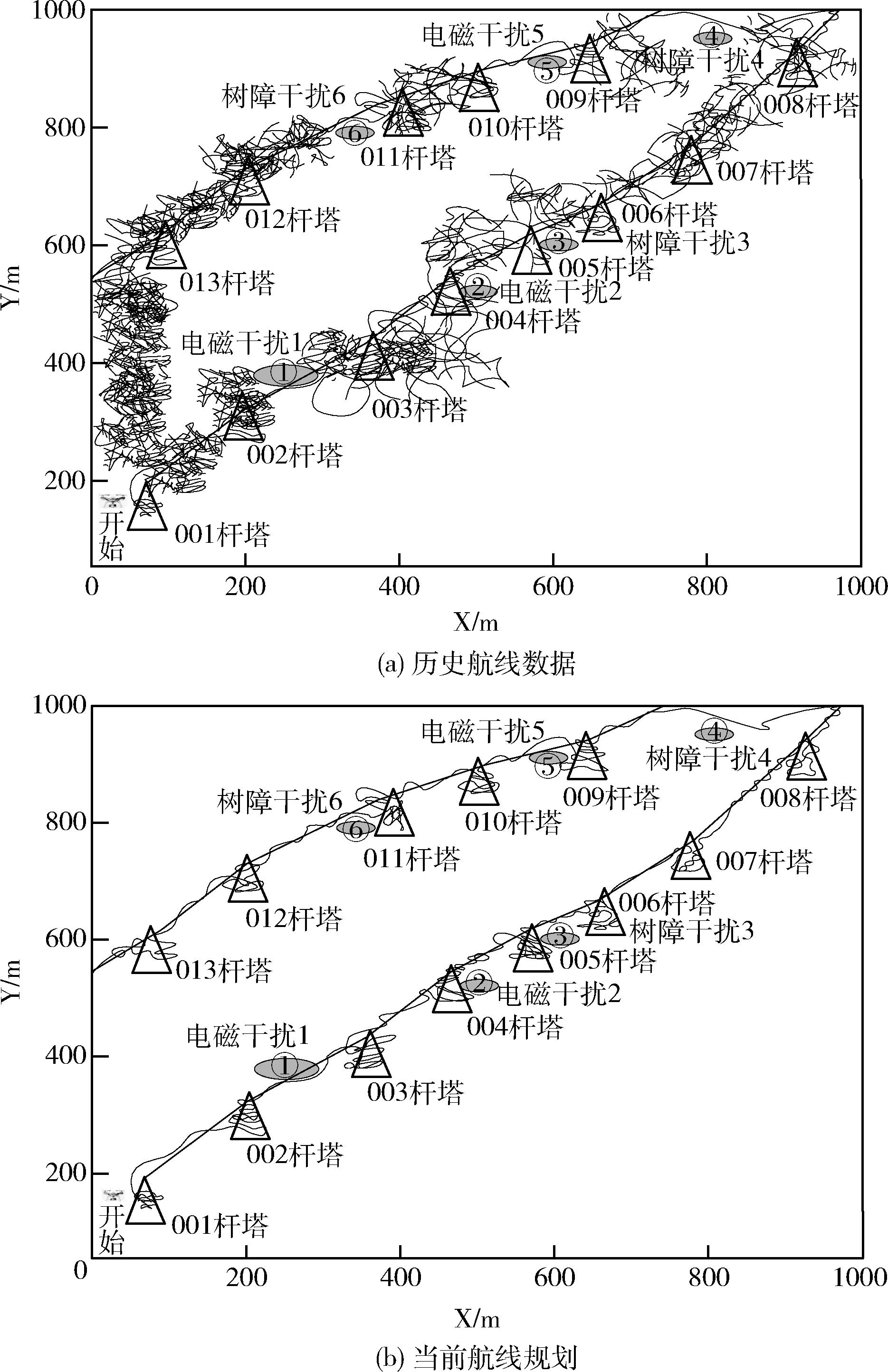
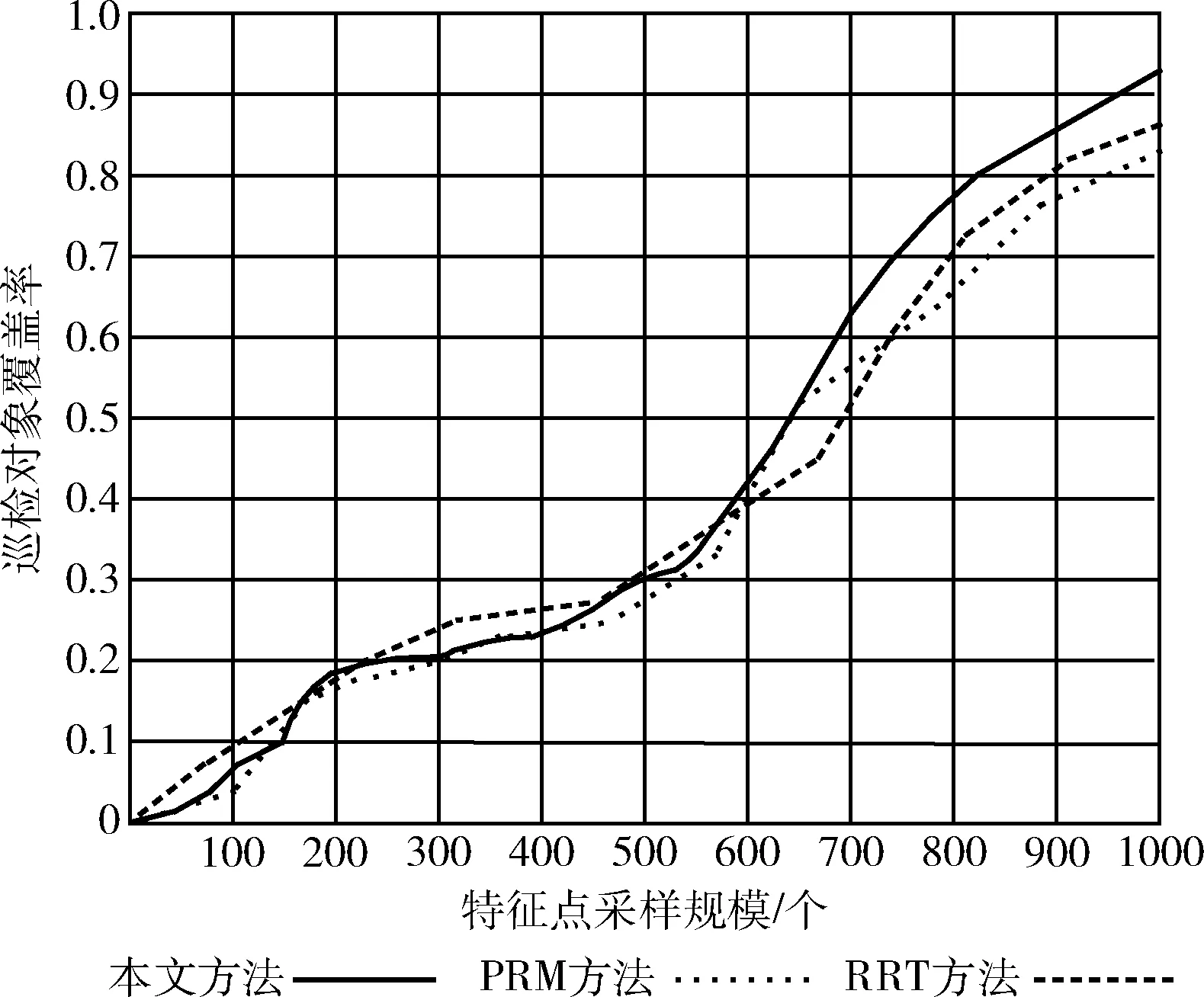
4.3 性能分析


4.4 可视化控制界面

5 结束语
猜你喜欢
小哥白尼(神奇星球)(2021年12期)2021-03-08
开放教育研究(2020年2期)2020-03-31
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
现代语文(2016年21期)2016-05-25
舰船科学技术(2015年8期)2015-02-27
大连民族大学学报(2015年2期)2015-02-27