
基于机器视觉的智慧城市路面裂缝检测关键技术研究
2021-05-23 09:30逢吉祥厉丹王玲龙王泳淞葛一张丽娜
电脑知识与技术 2021年11期
关键词:means算法
逢吉祥 厉丹 王玲龙 王泳淞 葛一 张丽娜


摘要:随着城市道路行业从大规模建设周期过渡到大规模养护周期,城市路面裂缝检测就道路养护部门的工作重点之一。目前城市路面裂缝检测技术已从传统的人工处理向自动化的方向发展。城市路面裂缝检测技术包括路面图像灰度化,图像滤波,图像增强,图像二值化,迭代阈值分割,K-means算法,路面裂缝参数计算。本文重点阐述了基于机器视觉的智慧城市路面裂缝检测关键技术研究。
关键词:路面裂缝检测;图像灰度化;迭代阈值分割;K-means算法
中图分类号:TP391;U41 文献标识码:A
文章编号:1009-3044(2021)11-0174-02
Crack Detection of Smart City Pavement Based on Machine Vision Research on Key Technologies
FENG Ji-xiang, LI Dan, WANG Ling-long,WANG Yong-song,GE Yi, ZHANG Li-na
(Information and Electrical Engineering College,Xuzhou Institute of Technology ,Xuzhou 221000, China)
Abstract : With the transition of urban road industry from large-scale construction cycle to large-scale maintenance cycle, urban pavement crack detection is one of the key work of road maintenance department. At present, the detection technology of urban pavement cracks has developed from traditional manual processing to automation. Urban pavement crack detection technology includes pavement image graying, image filtering, image enhancement, image binarization, iterative threshold segmentation, K-means algorithm, pavement crack parameter calculation. This paper focuses on the research on the key technology of pavement crack detection in smart city based on machine vision.
Key words: pavement crack detection; image graying; iterative threshold segmentation; K-means algorithm
1 引言
随着改革开放的深入发展,我国在交通运输领域的发展取得了重大的突破。道路行业已从大建设周期过渡到了大养护周期。目前我国对城市路面的裂缝检测主要依靠人工,人工检测的同时就伴随着人力物力的浪费,还容易出现遗漏裂缝的现象。伴随着智慧城市的飞速发展,基于图像处理城市路面裂缝的关键技术研究就迫在眉睫。
2 城市路面裂缝检测关键技术
整个系统过程如图1所示。
2.1 图像灰度化-加权平均法
图像灰度化:假设F(i, j)为RGB模型中的某像素,若其3种基色的亮度值相等,则会产生灰度颜色,将该R=G=B的值称为灰度值。针对城市路面裂缝图像的检测要求,需要将RGB图像转换为灰度图像。本系统采用加权平均计算灰度图像的方式对裂缝图像进行灰度化,即选取像素F(i, j)的R、G、B分量的亮度加权均值作为该像素的灰度值:
[Fg(i,j)=0.30*R(i,j)+0.59*G(i,j)+0.11*B(i,j)] (1)
2.2 K-means算法
K-means算法即K均值聚类算法,它是一种迭代求解的聚类分析算法。对于给定的样本集,按照样本之间的距离大小,将样本集划分为K个簇。让簇内的点尽量紧密的连在一起,而让簇间的距离尽量大。如果用数据表达式表示,假设簇划分为([C1],[C2],...,[Ck]),则我们的目标是最小化平方误差E:
[E=i=1Kx∈ci||x-ui||2] (2)
其中[ui]是簇[Ci]的均值向量,表达式为:
[ui=1Cix∈Cix] (3)
2.3圖像分割-迭代阈值分割
图像分割是由图像处理到图像分析的关键步骤,是把图像分成若干个特定的、具有独特性质的区域并提取关键目标的技术和过程。本文采用的是迭代阈值分割算法。迭代阈值分割算法的关键是确定阈值,阈值确定后,将阈值与像素点的灰度值逐个进行比较,像素分割可对各像素并行地进行,分割的结果直接给出图像区域。
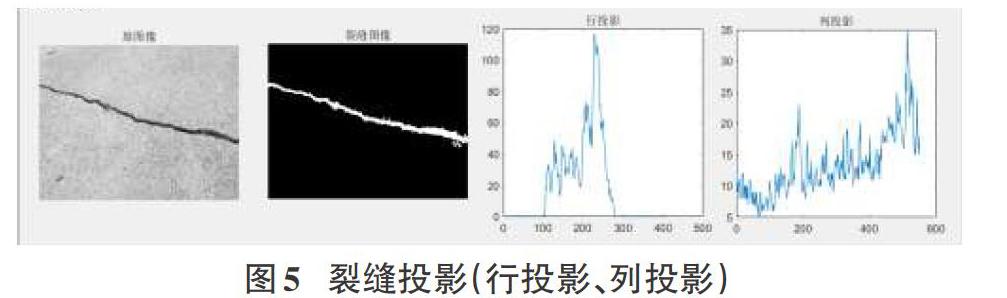
假设一副灰度裂缝图像用f(i,j)表示,其中(i,j)表示图像中像素的位置坐标,T为阈值,则阈值分割后的二值图像b(i,j)满足[b(i,j)={10f(i,j)≥Tf(i,j) 迭代阈值分割的具体步骤如下: 1)初始阈值。统计图像的最小灰度值[Tmin]、最大灰度值[Tmax],取二者平均值为初始阈值,即: [T=Tmin+Tmax2] (5) 2)分割。根据阈值T对图像进行分割,得到两个像素集合分别为[G1={f(i,j)≥T}] 和[G2={f(i,j) 3)灰度平均值。计算像素集合[G1]的灰度平均值[u1],即: [u1=1num(G1)(x,y)∈G1f(i,j)] (6) 像素集合[G2]的灰度平均值[u2],即: [u2=1num(G2)(x,y)∈G2f(i,j)] (7) 4)迭代。根据步骤3所求的[u1]和[u2],取二者平均值为新的阈值,即: [T=u1+u22] (8) 重复步骤2-4,直至阈值T收敛到某一范围为止。 3 基于机器视觉的图像处理系统 本系统的机器视觉的图像处理内容包含直方图均衡化、中值滤波去噪、对比度增强、二值化处理、二值图像滤波、裂缝识别、裂隙判断、裂缝拼接、裂缝投影、裂缝标记、显示参数等功能。 系统初始界面如图3所示。 用户点击载入图像时,系统自动将图像进行灰度化处理,依次点击直方图均衡化、中值滤波去噪、对比度增强、二值化处理、二值图像滤波对图像进行预处理消除图像的影响(干扰)因素,突出裂缝目标。再点击裂缝识别、裂隙判断、裂缝拼接,精确地获取裂缝区域信息,通过裂缝投影,判断裂缝方向,获取裂缝的特征。点击裂缝标记、显示参数,标记出裂缝位置以及显示裂缝信息。 3.1实验过程 系统总共可以分为三个步骤。 1)图像预处理,用户点击载入图像时,系统自动将图像进行灰度化处理,依次点击直方图均衡化、中值滤波去噪、对比度增强、二值化处理、二值图像濾波对图像进行预处理消除图像的影响(干扰)因素,如图4。 2)图像处理,对步骤1处理后的图像再进行裂缝识别、裂隙判断、裂缝拼接的操作,精确地获取裂缝区域信息,通过裂缝投影,判断裂缝方向,获取裂缝的特征,如图5。 3)显示结果,裂缝标记如图6,裂缝参数信息如图7。 4 总结 路面的安全对于国家发展、社会稳定以及个人安全至关重要,本文针对城市路面设计的裂缝检测系统便是为了有效的检测和识别出城市路面的裂缝。本系统通过图像预处理、迭代阈值分割关键技术,在统计国内外裂缝特征选取的基础上,利用机器模拟人眼,用户首先导入图像,然后经过图像的预处理后导出分割降噪后的裂缝的效果图,再经过形态学特征的效果图,并标记出裂缝的位置。 参考文献: [1] 李翠,冯冬青.基于改进K-均值聚类的图像分割算法研究[J].郑州大学学报(理学版),2011,43(1):109-113. [2] 王龙云.路面裂缝检测算法研究[D].南京:南京邮电大学,2012. [3] 李清泉,刘向龙.路面裂缝影像几何特征提取算法[J].中国科技论文在线,2007,2(7):517-522. [4] 杨洪伟,朱红金.基于BP神经网络裂缝分级方法研究[J].国外测井技术,2009(5):30-32,4. [5] 马荣贵,徐琨,刘飞飞.高速公路路面裂缝识别算法研究[J].交通信息与安全,2014,32(2):90-94. 【通联编辑:梁书】
猜你喜欢
哈尔滨理工大学学报(2017年1期)2017-04-08商业经济(2017年3期)2017-03-20哈尔滨理工大学学报(2016年4期)2016-11-10现代电子技术(2014年8期)2014-09-27
