一种车联网安全态势感知模型
2021-05-26 09:08王建李玉洲张宁任翔陈晓光李婧瑜
汽车实用技术 2021年9期
王建,李玉洲,张宁,任翔,陈晓光,李婧瑜
(1.国汽(北京)智能网联汽车研究院有限公司,北京 100176; 2.中国汽车工程研究院股份有限公司,北京 100086;3.恒安嘉新(北京)科技股份公司,北京 100086; 4.北京开放大学,北京 100081)
前言
通信技术与网络的融合促进了汽车产业走向智能网联时代。但随之出现的信息安全问题制约着车联网的进一步应用和推广。车联网的信息安全涉及汽车设备、车载网络、信息处理平台等部分,但目前多是针对其中某一部分进行研究,对于车联网系统整体安全方面的研究较少,在发生大规模信息安全事件时很难及时识别威胁,进行有效响应。安全态势感知能够掌握系统整体风险情况,预知安全威胁,实现有效响应。目前,不少学者将安全态势感知模型应用于各个领域,提升系统安全防御水平[1-4]。车联网设备基数大、结构复杂、移动性强、在线时间长等特点使车联网终端非常容易被攻击,对车联网系统进行安全态势感知能够实现大范围安全事件的有效识别和防御。因此,本文提出了基于大数据分析的车联网安全态势感知模型,首先对信息安全数据进行收集与分析,然后对安全要素的数据状态进行评估和预测,实现车联网总体安全态势的感知和处理。
1 车联网信息安全威胁
车联网是一个将汽车与外界联系起来的网络,能够实现车与人、车、路间的信息交互。车联网通过车联万物的互通功能收集车辆、道路、环境等汽车安全行驶所需的相关信息,并通过车载网络将多源信息传送到信息处理平台,对信息数据进行分析、处理及共享,然后根据车辆安全行驶过程中的不同功能需求进行控制决策,从而实现对车辆的有效控制及监管[5-6],其网络体系结构如图1所示。由此可知,车联网是一个从车载端到通信网络再到云端平台的信息交互过程,信息安全问题存在于车联网系统的各个环节。

图1 车联网的网络体系结构
车载端主要由传感器系统和车载控制系统等部分组成,主要功能是将传感器收集的相关数据利用通信网络传送给云平台,或是将云平台的处理命令传送到车载控制系统,实现汽车自动驾驶功能。其中ECU(各电子控制单元)、IVI(车载综合信息系统)、传感器、车载操作系统、多功能汽车钥匙等汽车部件存在较大安全风险,主要因为这些车载部件的操作系统、应用软件及固件等部分存在安全漏洞,容易受到恶意攻击,干扰汽车整车控制及行车安全。
通信网络由车内和车外两部分组成。车内网络主要是通过CAN总线采用广播机制连接车内各控制系统,实现各连接部件间的通信。车外网络通过通信技术将车载端智能部件与外部连接,实现车云通信及车路通讯。其中,T-BOX与CAN总线相连,能够实现车载端与云平台的信息传递。车载诊断系统OBD通过CAN总线可以联接到ECU对故障信息进行访问处理。通信网络系统中存在的安全问题主要是无线通信领域的信号窃取与干扰等。
车联网云平台是车联网数据分析和处理的中枢部分,可以对车辆信息进行收集、处理和监控,同时为用户提供车辆管理以及媒体娱乐等服务。但是云平台存在操作系统固有漏洞威胁等安全问题,在访问控制方面,攻击者可以通过攻击感知节点访问平台信息、干扰信息接入或者更改传输信息来干扰汽车行驶。因此,云平台应重点关注系统漏洞、接口访问、账户口令等安全问题。
车联网现有安全系统架构,不能满足智能网联下的信息安全要求。车联网系统的交互过程中都面临着严重的信息安全问题和挑战。为了保障汽车安全行驶及信息互联互通,需要构建车联网整体安全感知防御体系,对车联网安全态势进行全面感知,及时察觉威胁存在及攻击发生,实现有效响应。
2 车联网安全态势感知模型
安全态势感知能够从系统整体角度识别动态环境中的安全威胁并实现有效响应[7-8]。车联网安全态势感知技术不同于以往对硬件系统进行交互的传统防护程序,而是一个观察、学习、判断以及预测的过程,包含态势要素提取、态势评估以及态势预测三个层次,如图2所示。
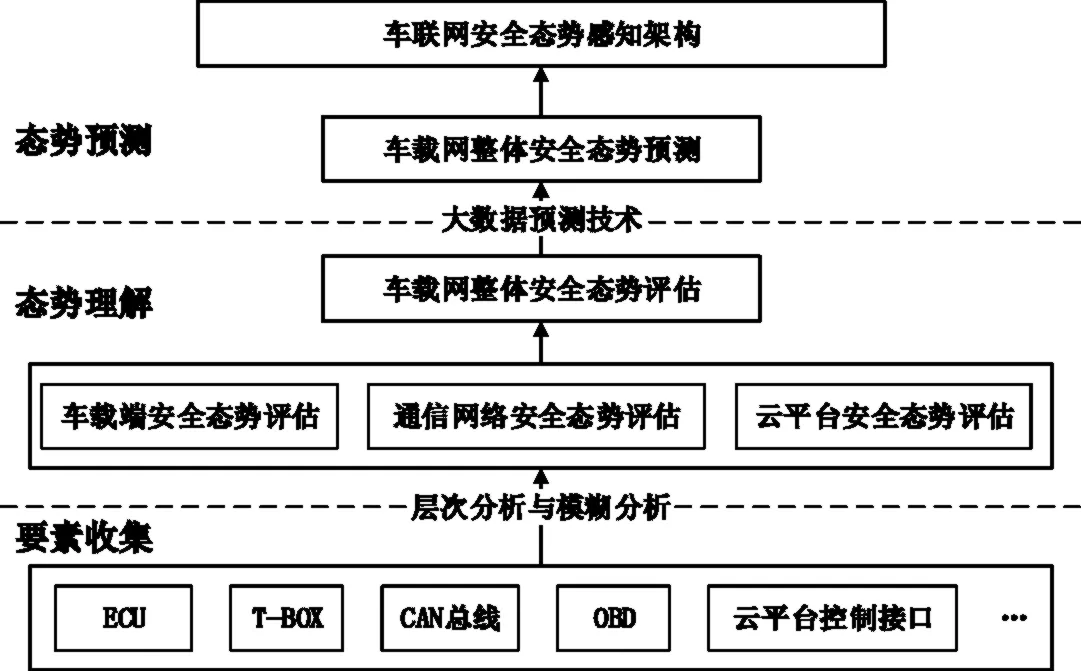
图2 车联网安全态势感知架构
2.1 车联网安全态势要素收集
车联网态势感知需要根据其面临的信息安全威胁,分析车载端、通信网络和云平台各部分的态势要素,形成要素集合,如图3所示。
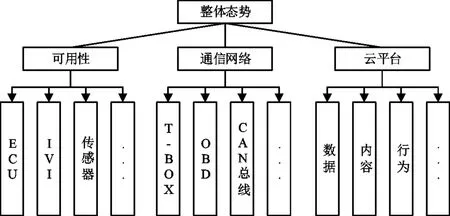
图3 安全态势要素
车载端主要涉及ECU、IVI、传感器、车载操作系统、多功能汽车钥匙等安全要素,要素集U1={传感器(v1)、ECU(v2)、IVI(v3)、车载操作系统(v4)、多功能汽车钥匙(v5)};通信网络主要涉及CAN总线、T-BOX、OBD等部件的安全要素,要素集U2={CAN总线(c1)、T-BOX(c2)、OBD(c3)};云平台安全主要包括信息资源非法访问、修改、破坏等问题,涉及云平台的系统安全、数据安全、内容安全、行为安全,要素集U3={系统(y1)、数据(y2)、内容(y3)、行为(y4)}。
利用大数据技术收集各要素的信息安全数据。设立评语集,对各时刻要素数据进行评价,获得态势要素评价向量,将评价向量作为安全态势评估的输入数据对系统安全状态进行识别。首先,通过分析将车联网整体信息安全状态分为5级,设评语集为V={安全、较安全、基本安全、不安全、危险}。然后,分析单个态势要素安全状态,得到安全态势评价向量。例如ECU当前安全状态中,安全占50%的概率,较正常占30%的概率,基本安全占10%,不安全占5%,危险占15%,可得ECU评价向量为v1(0.5,0.3,0.1,0.05,0.15)。最后,获得不同时刻要素评价向量,为车联网安全态势感知提供数据准备。
2.2 车联网安全态势评估
安全态势评估是安全态势感知模型的关键环节,评估效果好坏决定态势感知准确与否。本文采用层次化分析模型进行态势评估。模糊综合评价是层次化评估模型中的常用方法,能够实现定性与定量结合。层次分析法计算权重能够将定性描述转化成定量数值。因此,将层次分析法作为模糊综合评价法权重计算方法,能够实现更为科学的安全态势评估模型。评估步骤如下:
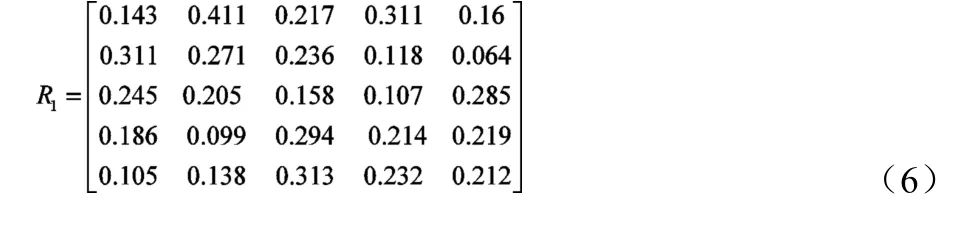
Step1:构建评价矩阵。根据各部分态势要素评价向量,构造车载端、通信网络、云平台模糊评价矩阵R1、R2、R3。
Step2:构建判断矩阵。分别计算车载端、通信网络、云平台安全要素的重要性判断矩阵U1、U2、U3。
Step3:分别计算各判断矩阵最大特征值λmax。

其中,W为正规化判断矩阵每一行的均值。
Step4:一致性判断。计算各判断矩阵U的一致性指标CI和CR(RI取值可查表1获取):

如果CR<0.1,则说明U符合一致性要求,可以将W作为该部分评价矩阵权重向量;反之需要重新构建判断矩阵。
Step5:归一化处理。归一化λmax对应特征向量,得出各部分态势要素权重向量W1、W2、W3。

表1 平均随机一致性表
Step6:合成评价结果。选择加权向量为K为(0.4,0.3,0.2, 0.1,0),与权重向量W和模糊矩阵R进行运算合成。合成评价结果为:

Step7:总体态势分析。设车载端、通信网络、云平台的权重表示为wi(w1+w2+w3=1),则总体态势值为:

Step8:根据表2的态势感知级别表判断态势状态。

表2 态势感知级别表
2.3 车联网安全态势预测
车联网安全态势感知的最终目的是要尽早发现可能存在的安全问题,及时做出预防措施,降低损失。因此,提高预测结果准确度是态势感知的重要问题。根据安全态势数据特征,采用RBF神经网络进行态势预测。RBF神经网络较快的学习速度和较强的函数逼近能力能够实现安全态势的准确预测。如图4所示,RBF神经网络由输入层、隐含层和输出层三部分组成。隐含层中包含径向基函数能够实现数据间非线性转换,输出层则将隐含层输出信号进行数学处理,产生输出信号。

图4 RBF神经网络结构图

其中,wij为隐含层与输出层神经元间的权重。
将某时段内车联网安全态势数据作为输入,应用RBF神经网络算法预测下一时间段安全态势值,获取未来信息安全态势,对潜在安全威胁进行感知与预警,能够提高车联网系统可靠性。
综上,基于大数据分析的车联网安全态势感知模型计算步骤如下:
(1)应用大数据收集技术获取车载端、通信网络、云平台的信息安全态势数据。
(2)分析各部分信息安全态势数据,获得信息安全要素评价向量。
(3)使用模糊评价法和层次分析法分别获得车载端、通信网络、云平台以及车联网整体安全态势值。
(4)根据安全态势数据特征确定RBF神经网络参数设置。
(5)将历史态势数据作为RBF神经网络输入,预测下一时段安全态势值,实现安全态势感知。
3 案例分析
为了验证模型态势感知有效性,将V2X信息安全机制课题研究的测试平台实验数据作为本文测试数据。采集来自车载端、通信网络、云平台等部分的数据信息。采用大数据收集及挖掘技术获取并处理相关情报信息(包括漏洞、威胁、事件等),提取单位时间内攻击实体、源ip地址、目标ip地址、安全事件类型等基本信息,如表3所示。然后统计安全态势感知中每一要素的实际情况,如表4所示,根据专家经验对要素状态进行分析评价,获得安全要素的评价向量。

表3 事件基本信息

表4 t时刻的安全事件统计(t为统计窗口时间)
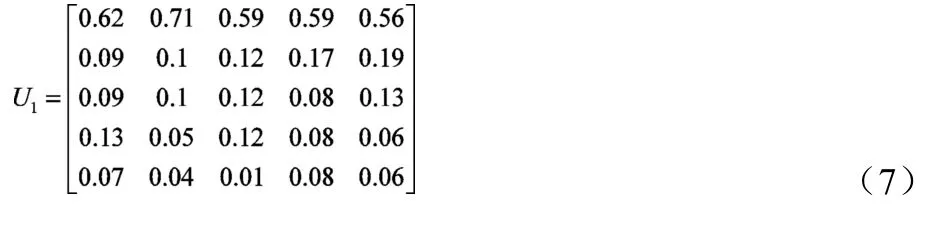
(1)以时刻t时刻为例,通过统计信息及专家经验评价,可以获得车载端各安全要素评价向量。根据车载端安全要素评价向量,构造t时刻车载端模糊评价矩阵R1:
(2)对于车联网来说,遭受到网络威胁对整个车联网安全的影响程度越大,其危险程度就越高,所占权重就越大。按照表1,获得评价目标的重要性判断矩阵U1,同时正规化判断矩阵。
(3)根据式(1),计算权重向量及特征根:

(4)根据式(2)对权重向量进行一致性检验:CI=0.038,RI=1.12,CR=0.034<0.1。因为,CR<0.1则通过了一致性检验。
(5)根据式(3)计算合成评价结果,获得t时刻的车载端安全态势值S1=0.238。同理,按照上述计算过程,可得t时刻通信网络和云平台的安全态势值分别为S2=0.203,S3=0.176。
(6)通过分析得到总体态势值中车载端、通信网络和云平台的权重向量为W=[0.3,0.4,0.3],根据式(4)计算出t时刻车联网的总体安全态势值为:

通过大数据技术收集不同时刻的安全态势数据,根据以上计算过程可以得出车联网任意时刻的安全态势值。不同时刻车载端、通信网络、云平台和车联网系统总体安全态势值如表5所示:
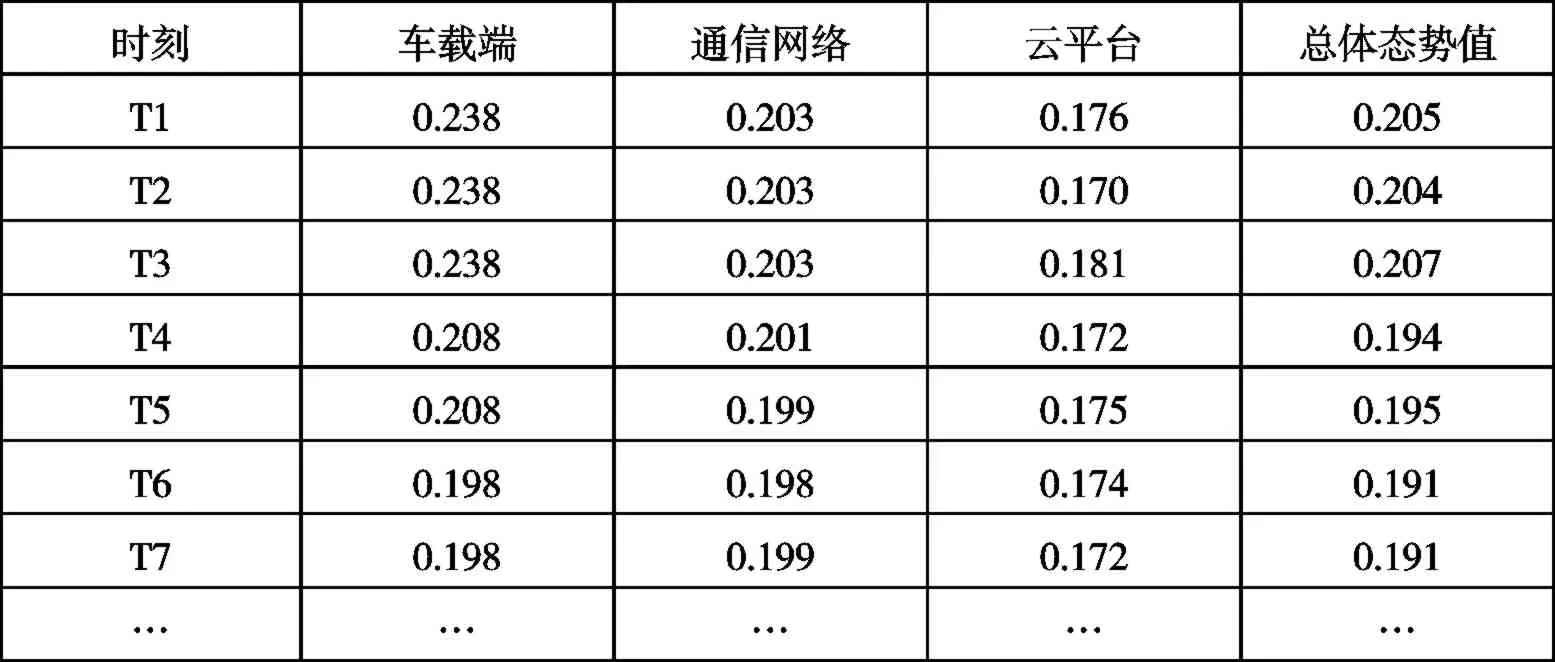
表5 各个时刻车联网安全态势值
选取长度为60的安全态势时间序列数据。将60个时间序列进行划分,前50个作为训练数据,后10个作为测试数据。根据时间序列数据特征对RBF神经网络进行参数设置,应用RBF神经网络算法分别对车载端、通信网络、云平台、车联网总体安全态势进行预测,结果如图5所示,态势预测值与实际态势值比较接近,与实际态势走势基本吻合,可以实现车联网的态势感知。根据表3态势感知级别可知,该时段内车联网的安全态势属于不安全状态,需要注意车联网各部分的安全状态,尤其是云平台部分。车联网信息安全态势感知模型可以监控当前信息安全状况并预测未来安全状态的变化趋势,为保障车联网的信息安全提供参考依据,实现对网络攻击的有效响应。
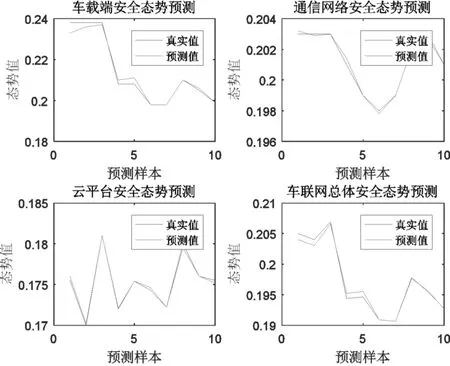
图5 车联网安全态势预测值
4 结论
为防范网络攻击,应对车联网出现的信息安全问题,需要感知车联网的整体安全态势。本文提出了基于大数据分析的车联网安全态势感知模型。首先,分析目前车联网运行过程中需要重点注意的安全威胁;再对车联网的车、网、云三个层面的安全态势数据进行提取;最后,使用大数据分析技术对系统安全态势进行评估和预测,实现对车联网安全态势的整体把控。将基于大数据分析的安全态势感知模型应用于 车联网系统,不仅能够反映当前车联网信息安全的整体状况,还能够提前感知车联网的安全态势,保障汽车信息安全,促进车联网的发展和应用。由于车联网尚处于推广发展的前期,与大范围推广应用时的安全环境存在一定差距,在后续研究中需要实时更新安全威胁种类,保障态势感知准确性。
猜你喜欢
社会科学战线(2022年4期)2022-06-15
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年10期)2022-06-09
今日农业(2022年1期)2022-06-01
新高考·高一数学(2022年3期)2022-04-28
云南画报(2021年5期)2021-07-22
汽车与安全(2020年1期)2020-05-14
现代兵器(2017年4期)2017-06-02
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23