多源数据融合评估算法的研究
2021-06-01 12:57郭妍利唐思圆谷升阳
数字技术与应用 2021年4期
郭妍利 唐思圆 谷升阳
(1.中国电子科技集团公司第38 研究所,安徽合肥 230031;2.武汉大学电子信息学院,湖北武汉 430072)
0 概述
由于多源数据融合技术具有多种数据源,并能够多层次、全方位感知信息,已被大量应用于军事和民用领域[1-5]。但对多源数据融合算法的评价,基本还处于定性评价阶段,缺乏体系化的定量评估手段;缺乏标准的融合评估体系,用于开展多源数据融合情报系统的效能评估[2]。为了全面评估和对比不同多源数据融合算法的优劣性,本文建立了一个合理的且相对全面的评估指标体系,定量计算多源数据融合系统的性能指标,为多源数据融合功能、性能的提升提供改进的方向和依据,有助于提高多源信息融合评判方法的科学化水平。
1 融合评估指标体系
融合评估主要是对多源数据融合后航迹的评估,包括融合评估指标体系的建立,评估指标计算方法的确定,评估数据的记录和导入,评估指标计算,评估结果图-表展示,及评估报告自动生成等功能。
融合评估指标体系包括两个方面,含系统性能评估和航迹质量评估。其中,系统性能评估有系统周期处理最大航迹数和系统瞬时处理最大航迹数两个指标;航迹质量评估包括系统航迹质量评估和单条航迹质量评估,其中系统航迹质量评估包括漏情率、虚情率和时效性等指标;单条航迹质量评估包括航迹起始时间、漏关率、错关率、航迹零碎度和位置精度等指标。融合评估指标体系如图1所示。

图1 融合评估指标体系Fig.1 Integrated evaluation index system
2 融合评估指标计算
对融合系统进行评估时,涉及到的目标航迹有真值航迹、雷达探测原始航迹和融合航迹。其中真值航迹数包括目标真值航迹数N 和非目标真值航迹数M。目标真值航迹和非目标真值航迹定义如下:
目标真值航迹:有真值对应的观测目标航迹;
非目标真值航迹:没有真值对应的非观测目标航迹。
2.1 融合系统性能评估指标
对融合系统性能的评估是对影响系统有效性指标的评估,即:系统周期处理最大航迹数和系统瞬时处理最大航迹数两个指标。
(1)系统周期处理最大航迹数,是指在周期内,融合处理系统能够处理的最大航迹数。该指标用于评估融合系统的处理能力。当某一融合系统不满足该处理容量指标时,则该系统性能指标不达标,不再进行其他评估指标计算。
(2)系统瞬时处理最大航迹数,是指在极短时间内系统能够处理的最大航迹数。该指标用来衡量融合系统的瞬时处理能力。当系统不满足该指标时,融合系统接收大容量数据时会出现融合软件卡死、信息丢失等情况,因此当该指标不达标时,默认融合系统不合格,不再进行其他评估指标计算。
2.2 航迹质量评估指标
2.2.1 航迹相关性计算
在航迹质量的评估过程中,首先根据导入的数据进行融合航迹与真值航迹及原始航迹之间相关性计算,计算过程为:(1)真值航迹与融合/原始航迹之间的相关计算。单条真值航迹与系统中所有融合/原始航迹分别进行相关,计算获得真值航迹和融合/原始航迹的对应关系表;(2)融合航迹与原始航迹之间的相关计算。单条融合航迹与雷达探测原始航迹分别进行相关,计算获得融合航迹与原始航迹的对应关系表;(3)融合航迹与相关成功的原始航迹之间的相关计算。将相关成功的一条或多条原始航迹的航迹点,按照时间排列在一个链表上,融合航迹的航迹点与原始航迹点遍历相关,获得融合航迹与原始航迹之间相关成功航迹点的个数。
2.2.2 系统航迹质量评估指标
(1)系统漏情率。漏情率是指融合系统未发现目标情报的概率。
计算方法为:真值航迹中没有与融合航迹相关成功的真值航迹数与系统真值航迹总数的比率。其中系统真值航迹总数为系统真值航迹数减去没有与原始航迹相关成功的真值航迹数。漏情率主要用于评估融合系统目标的发现能力。
(2)系统虚情率。虚情率是指融合系统输出虚假目标情报的概率。
计算方法为:融合航迹中与真值航迹和原始航迹均没有相关成功的融合航迹数与系统真值航迹总数的比率。虚情率主要用于评估融合系统目标发现的正确性。当虚情率为0时,表示该融合系统没有虚假目标产生;当虚情率大于1 时,表示该融合系统产生的虚假目标比较多。
(3)系统时效性。系统时效性是指融合系统从接收原始航迹时间开始到融合航迹输出所消耗的时间。
计算方法:系统所有融合航迹与相关成功的原始航迹航迹点之间的时间差求和取平均值。计算获得的系统处理时间越大,表示该融合系统时效性越差。
2.2.3 单条航迹质量评估指标
(1)航迹起始时间。航迹起始时间是指从接收到原始航迹点开始到建立一批新的稳定融合航迹的时间。
计算方法:当前融合处理软件航迹起始的准则是多点起始,不同的融合算法有一点起始、三点起始等多种准则,但一旦建立稳定航迹,即将建立稳定航迹的连续多点均输出,因此通过融合航迹中航迹点输出与输入的时间差来计算航迹起始时间,对时间差进行比较,如果在第n点的时间差远小于前n点的时间差,则认为融合航迹在第n点起始,起始时间为第n 点输出时间与第一点输入时间之间的时间差。
(2)漏关率。航迹漏关率是指融合航迹的丢点概率。
计算方法:与该融合航迹相关成功的原始航迹中匹配不成功的航迹点数与原始航迹总航迹点数的比率。漏关率越低,说明该融合航迹输出连续性越好。
(3)错关率。航迹错关率是指融合航迹点相关错误的概率。
计算方法为:融合航迹与相关成功原始航迹进行航迹点相关,相关失败的航迹点数与原始航迹总航迹点数的比率。
(4)航迹零碎度。航迹零碎度是指一条真值航迹在融合系统中被分裂输出的航迹总数。零碎度越大说明该航迹分裂严重。
(5)位置精度。位置精度是指实际目标位置与融合航迹输出的位置之间的误差标准差。这个指标用来衡量融合系统航迹的坐标位置信息与真实坐标位置信息的符合程度。在极坐标坐标系下,位置精度包括有距离精度和方位精度。下面以极坐标系下距离精度为例进行计算。
计算方法为:1)计算融合航迹某一点距离的一次差;2)计算该融合航迹所有点距离的一次差,并求平均获得距离一次差均值;3)计算融合航迹距离信息的一次差标准差;4)根据一次差标准差计算航迹一次差的均方根误差,即该融合航迹的距离精度。
2.3 综合评估指标计算
综合评估指标即将计算获得的各个指标进行归一化处理并加权计算获得一个总的得分的过程[3-4]。综合评估指标计算过程为:(1)指标选择;(2)指标权重设置;(3)单个指标计算;(4)单个指标归一化处理;(5)不同指标加权求和。
最终计算获得综合评估指标为(0,1)标量空间上的值,值越大表示该融合系统融合算法越优越。
3 仿真验证实验结果
按上述评估指标体系对仿真系统采集数据和实际试验采集数据进行融合性能评估,图2 为仿真数据评估结果,图3为实战数据评估结果。
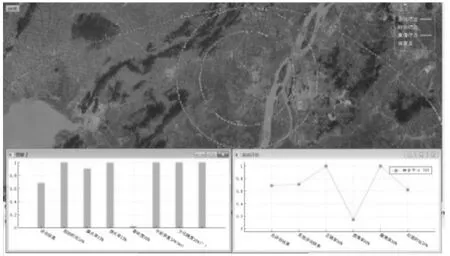
图2 仿真数据评估结果Fig.2 Simulation data evaluation results

图3 实际数据评估结果Fig.3 Actual data evaluation results
经离线比对分析,该系统的评估结果与实际分析结果一致,与融合软件的实际应用效果一致。仿真结果和实际应用结果表明,该评估结果可信,可以用于对多源数据融合系统进行融合算法的性能评价。
4 总结
本文通过建立了反应实战需求的融合指标体系,对同一场景的不同融合结果进行评估,提供了一种有效的空情多源信息融合的定量评估手段;同时可根据评估结果查找融合算法的短板,进行针对性地改进,促进了空情多源信息融合软件功能及性能的提升。
猜你喜欢
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
领导决策信息(2017年11期)2017-05-17
电子制作(2017年1期)2017-05-17
北京航空航天大学学报(2016年6期)2016-11-16
智能系统学报(2015年5期)2015-12-03
浙江大学学报(工学版)(2015年2期)2015-05-30
舰船科学技术(2015年8期)2015-02-27
华北水利水电大学学报(社会科学版)(2011年4期)2011-11-22