
智能购物小车模块化构建分析*
2021-06-01 02:46秦航,颜颖
南方农机 2021年10期
秦 航,颜 颖
(江西制造职业技术学院,江西 南昌 330095)
1 智能购物小车总体功能模块
智能购物小车总体功能模块主要包含人机交互模块、导航模块、驱动模块、避障模块、自检模块、充电模块、自助结账模块等功能模块。如图1所示。
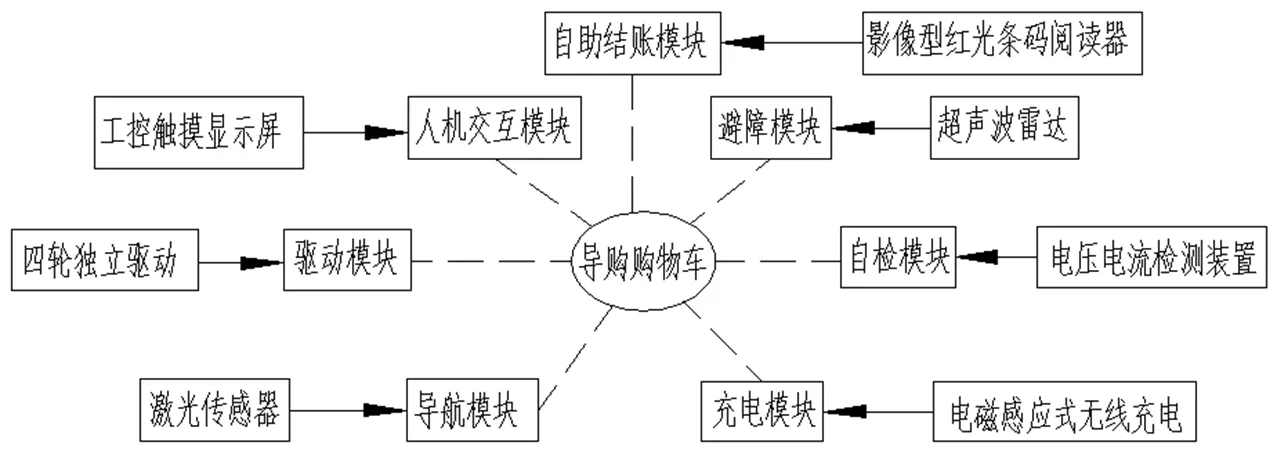
图1 购物车功能设计
2 各模块工作原理
2.1 导航模块
本模块将购物车的自主导航模式和车联网模式相结合,利用超市自带的服务器对整个商场的购物区域进行地图区域划分,一般商品摆放都会按照购物区域进行,每种商品对应一个地图上的区域坐标,将商品的区域地图坐标数据录入到商品导航数据库,如表1所示,这样就完成了商品与购物区域及地图坐标的对应。通过激光雷达传感器收集的数据,利用后台服务器对整个超市环境进行二维栅格地图构建,生成全局地图数据提供给全局路径规划器使用,并在混合了A*算法和DWA算法的基础上对智能购物车进行全局路径规划和局部路径规划,达到针对智能购物车的起点和终点进行最优路径规划的目的[1]。其次建立一个商品列表供顾客查询自己想要购买的商品,当顾客点击想要购买的商品时,后端将商品列表在商品导航数据库进行匹配,查询商品的所在购物区域和地图坐标数据,通过无线局域网将地图坐标数据发送给购物车,导航模块利用激光传感器将购物车位置与地图进行匹配后进行导航,实现流程如图2所示。
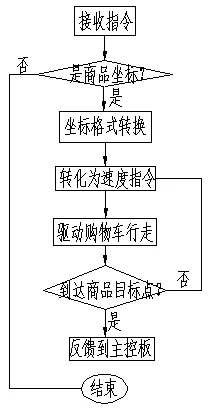
图2 购物车导航实现流程图
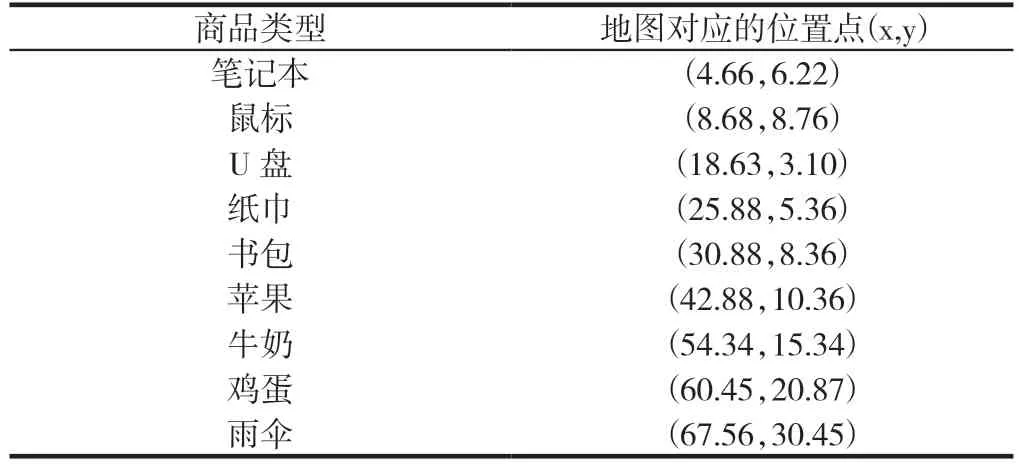
表1 商品导航数据库
导航导购:购物车上搭载的交互系统带有地图导航功能,超市可以将场所的地图信息、坐标信息、商品位置等信息上传到后台服务终端中,顾客可以输入关键字检索商品,也可以根据类别分层级按网页浏览方式检索商品,后台服务器检索确认顾客所需商品的坐标位置,购物小车自动定位自身位置,通过不断更新购物车所在空间的位置信息,利用动态路径规划算法和SLAM技术,自主导航指引消费者找到商品[2]。
顾客完成购物后,按下购物车上的“返程”键,购物车便进入自主导航和自动泊位模式。利用激光雷达的扫描功能可以构建实时地图,优化自动返程泊位路径。通过导航模块的定位功能和车联网功能实现购物车的自主行驶和自动泊位。
2.2 驱动模块
驱动模块轮毂电机独立驱动或采用履带式驱动。驱动模块接收STM32 主板发送的指令,以驱动购物车底盘机械结构的行走,控制其行走方向和速度,使购物车向目标商品移动。根据使用场景、地面环境以及为了满足购物车载物的要求,可采用部分新能源汽车中的新技术四轮轮毂电机驱动。轮毂电机可实现各自独立驱动,控制左右车轮形成不同的转速,实现±3°的转向角度,从而控制购物车的转向行驶[3]。也可以采用履带式驱动实现转向控制,履带式驱动转向角度更大,可以实现原地转向,转向运动轨迹短,但履带的磨损较大,导致其寿命缩短,不太符合经济性要求,因此建议选用轮毂电机独立驱动。
VCU(整车控制器)接收到ECU(电子控制单元)信号,并采集得到各类传感器信号经过处理计算,决策出1个主动后轮转角和4个车轮驱动力矩,并分别通过CAN(控制器局域网络)发给转向电机控制器和轮毂电机控制器,主动后轮转角由转向电机执行,驱动力矩由轮毂电机执行[4]。
增加电机位置传感器通过转向角度变化的模拟量分别计算四个车轮应有的车速,并通过神经网络PID(比例-积分-导数控制器)控制方法对控制驱动电机输出,如图3所示。

图3 四轮独立驱动控制模块
根据实际应用情况,结合控制成本考虑,智能购物车底盘整体驱动性能目标参数如表2所示。
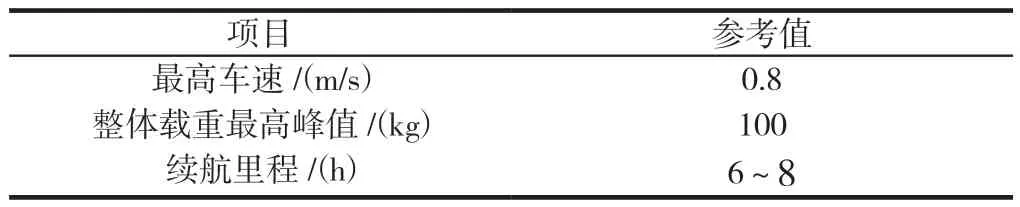
表2 智能购物车底盘驱动模块参数
2.3 避障模块
避障模块主要利用超声波传感器来实现,超声波传感器具有指向性强,能量消耗缓慢,检测迅速方便,易于做到实时控制,且具有一定的测量精度等优点。超声波传感器通常采用压电晶体材料,由超声发射和接收两个模块组成。工作原理是由超声发射模块将电能转变成机械振动产生超声波进行定向发射,超声波碰到物体后会产生反射回波,反射回波信号由接收模块转换成电信号回传给控制模块[5]。如图4 所示,超声波在空气中的传播速度为V,发送和接受的时间差为△t,传感器到障碍物的距离S 为速度与时间差的乘积的一半,如式(1)所示:

购物车以STM32为控制系统核心,在硬件上采用四轮独立驱动模型,结构稳定,承载灵活,可以朝任意方向移动,五路超声波传感器分别测量小车左方、左前方、前方、右前方、右方障碍物的距离,并根据所测数据采取相应的避障措施。
2.4 无线充电模块

图4 超声波传感器原理
该模块安装在购物车底部,采用电磁感应的无线充电技术为购物车提供续航的电源。透过固定区域的充电基板发送高频率电磁波,利用供电方(充电板)和受电方(购物车)双方产生的感应磁通量来进行电力传输,结构相对简单,成本低,是常见的无线充电方法,原理如图5 所示,初级线圈一定频率的交流电,通过电磁感应在次级线圈中产生一定的电流,从而将能量从传输端转移到接收端[6]。
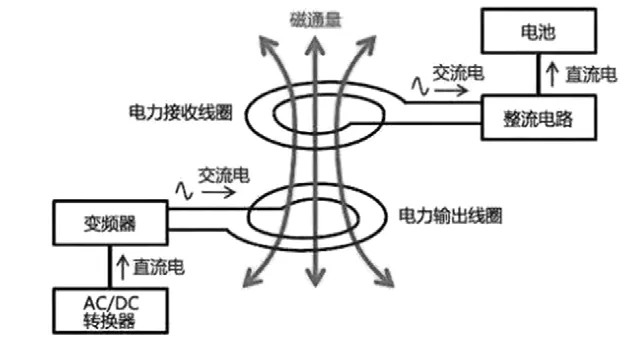
图5 电磁感应无线充电原理
电磁充电技术能量可传输距离较短,充电板与购物车电力接收线圈之间以磁场传送能量,两者之间不用电线连接,因此充电器及用电的装置都可以做到无导电接点外露,对于公共场所使用的智能购物车安全性较好,但会受摆放位置影响,所以该模块布置在购物车底板的前端,与固定区域的充电板接触,为内置电池充电。
3 结论
本文主要阐述在软硬件搭建的平台下,智能购物车在导航模块、驱动模块、避障模块、无线充电模块中采用的硬件设施,其中导航模块采用激光传感器,驱动模块采用步进电机,避障模块采用超声波传感器,自检模块利用电流电压检测原理,在购物车发生行为异常时自动断电以起到保护作用,充电模块利用电磁感应原理对购物车进行无线充电。通过对智能购物车功能实现的原理和流程框架的梳理,为智能购物车的模块化设计提供一定的思路。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
疯狂英语·初中版(2020年5期)2020-07-16
海峡姐妹(2020年5期)2020-06-22
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
小小艺术家(2018年3期)2018-06-11
21世纪商业评论(2017年12期)2017-12-26
IT经理世界(2017年23期)2017-12-11
军事文摘·科学少年(2016年7期)2016-09-20
为了孩子(3~7岁)(2016年6期)2016-05-14
