并联式混合动力汽车最优控制方法
2021-06-02 10:49吴昌军许辉丁镇涛李港赵春领
农业装备与车辆工程 2021年5期
吴昌军,许辉,丁镇涛,李港,赵春领
(400074重庆市 重庆交通大学 机电与车辆工程学院)
0 引言
与传统的基于发动机的汽车相比,混合动力汽车(HEV)的复杂性相对较高。近年来,针对混合动力汽车的能量管理与优化的研究日益增多[1-2]。20世纪80年代,J.Bumby[3]提出逻辑门限值控制策略,它的主要原理是通过设定门限值参数保证发动机工作在最优工作区间;Lin[4]等人通过对全局最优策略的实验结果的分析,得出基于全局优化的控制方法能够在全局区域里找到最优的解。瞬时最优能量管理策略[5-6]是使用等效因子对动力电池释放或吸收的电能进行折算,再与发动机所消耗的瞬时燃油能量相加得到瞬时总油耗。基于优化的控制方法如ECMS算法[7-8],可以在提高实时性的基础上得到近似全局最优解。在此基础上,重庆交通大学的韩海硕[9]提出一种改进型瞬时等效燃油消耗最低策略(ECMS),将电池充放电过程等效为虚拟的发动机运转过程,与传统ECMS对比仿真分析发现SOC提高了1.48%,燃油经济性提高了3.20%;罗远平[10]提出了基于道路工况预测的A-ECMS,得到的结果表明,燃油经济性提高了6.54%且电池SOC更稳定、更好地维持在初始值附近。
目前,虽然已经提出了很多的混合动力汽车的控制策略,但是并联式混合动力汽车的速度和充电损耗的协同优化仍是一大难题,这是因为,对于并联式混合动力汽车来说,电池SOC具有宽范围[11],增加了自由度,且难以选择最佳参考值。针对上述问题,本文通过混合优化工具优化并联式混合动力汽车结构,旨在最小化燃料消耗,优化充电损耗和发动机转矩波动,以实现动力性、经济性和乘坐舒适性的协同优化。
1 整车参数与建模
并联式混合动力汽车结构如图1所示。它的传动系统由发动机、电动机、转矩耦合器和蓄电池4个部分组成[12]。
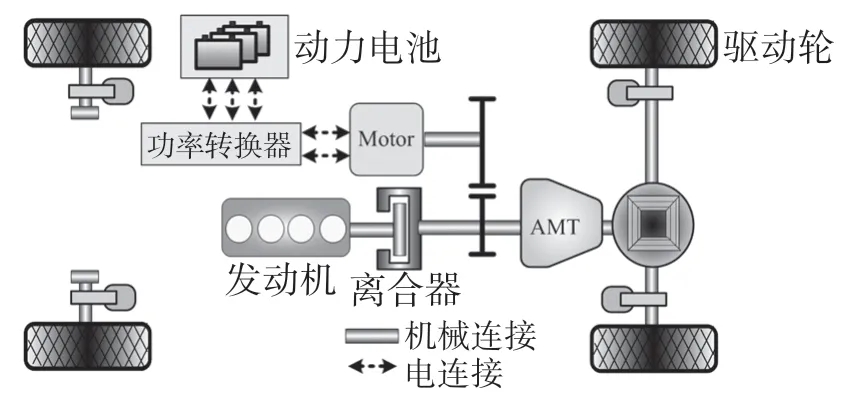
图1 并联式混合动力汽车的基本结构Fig.1 Basic structure of parallel hybrid electric vehicle
1.1 整车基本参数
本文所选取的并联式混合动力汽车的动力总成参数如表1所示。
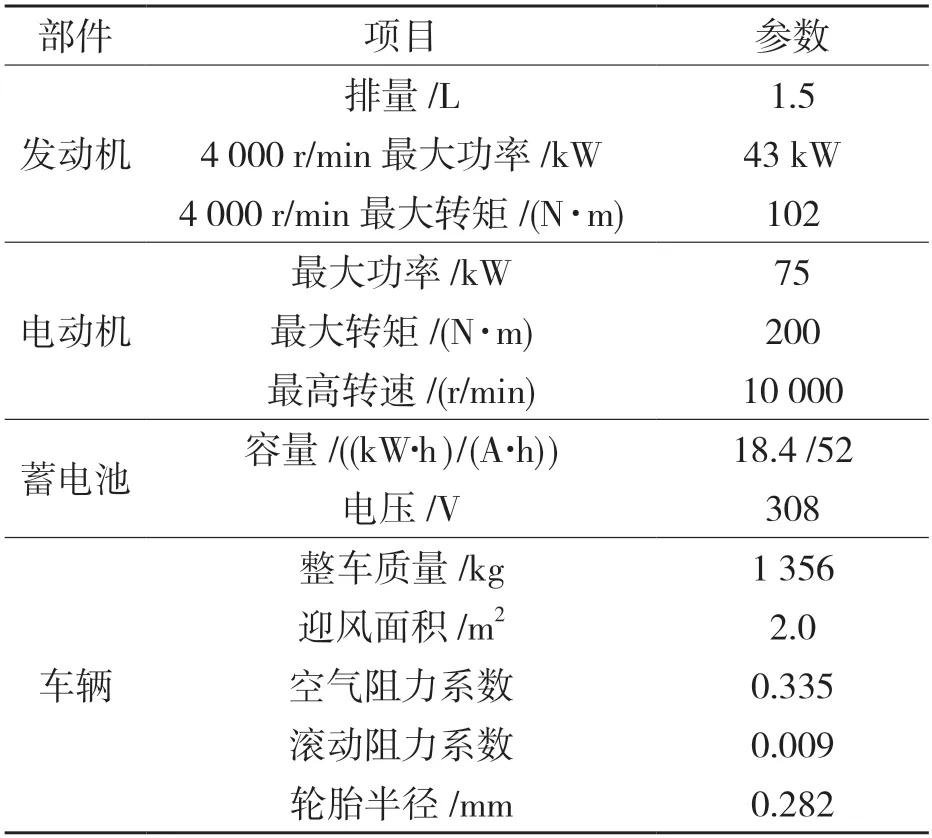
表1 并联式混合动力汽车基本参数Tab.1 Basic parameters of parallel hybrid electric vehicle
ADVISOR仿真软件中的整车模型是由MATLAB/Simulink建立的整车各部件模型在ADVISOR中集成得到[13]。图2是所搭建的并联式混合动力汽车整车模型顶层结构,主要由整车、发动机、循环工况、车轮和半轴、主减速器、变速器、离合器、转矩耦合器、能量存储器、电机与控制模块以及整车控制模块等组成。

图2 基于ADVISOR的并联式混合动力汽车模型Fig.2 Parallel hybrid vehicle model based on ADVISOR
ADVISOR软件仿真同时用到了前向和后向2种仿真方法。仿真时,先进行后向仿真,得到发动机与蓄电池组实际的输出功率,然后进行前向仿真计算出汽车的实际车速。
1.3 基于AMESim的整车建模
本文所建的并联式混合动力汽车的整车模型主要包括6个重要子模型:驾驶员模型、车辆模型、发动机模型、电机模型、电池模型和整车传动系模型[14]。并联式混合动力汽车的整车模型如图3所示。
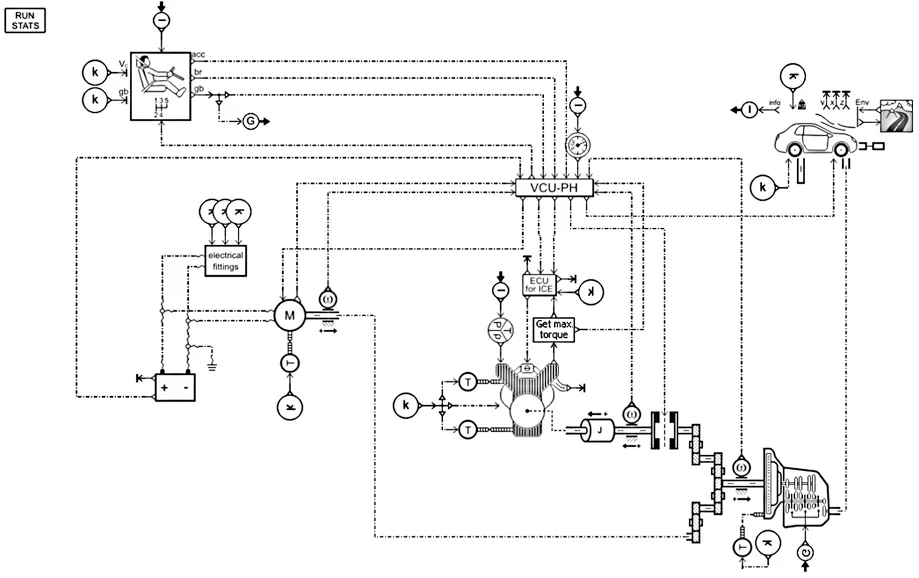
图3 基于AMESim的并联式混合动力汽车模型Fig.3 Parallel hybrid electric vehicle model based on AMESim
车辆模型采用了考虑滚动阻力、空气阻力、坡度阻力的DRVVEH01模型,使得车辆运行更接近实际工况,该模型可以实时测得车辆的速度、高度和位置并输出。
1.4 混合优化工具HOT
HOT(Hybrid Optimization Tool)是基于最优控制理论,特别是基于被称为庞特里亚金极小值原理(PMP)的优化方法[15]。
每个混合动力汽车结构都由一个或多个自由度完成规定的驾驶循环。例如,并联混合动力汽车,车轮上的总扭矩是由要遵循的循环施加的,但是可以自由选择其扭矩来自发动机还是电机。
最优控制策略意味着在周期的每个时间步上找到每个自由度的最优值。在混合优化工具HOT中,“最优”指的是在循环结束时对SOC的约束条件下使得整个周期的燃油消耗最小化,因此,SOC是唯一考虑的动态变量。此最优控制问题可以定义为在任意t ∈[0,t],找寻一个u(t),满足

约束条件:

2 仿真结果分析
将并联式混合动力汽车的动力总成参数导入到ADVISOR和AMESim的并联式整车模型中,设置汽车在典型的城市驱动循环NEDC工况下工作,设置动力电池初始值为70%,仿真时间为1 200 s,仿真结果见表2。

表2 仿真结果Tab.2 Simulation results
车速跟随情况如图4所示。图4表明,在ADVISOR和AMESim中,汽车均可稳定地在NEDC工况下工作,说明所设置的并联式混合动力汽车的参数满足NEDC工况要求。
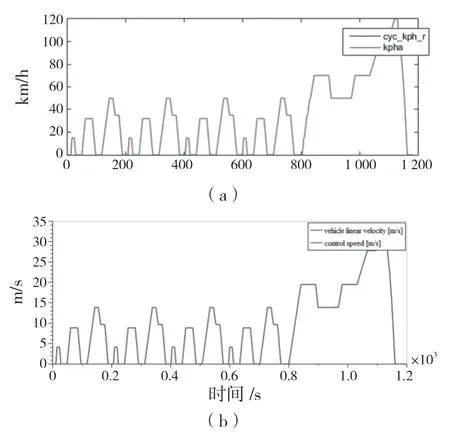
图4 ADVISOR和AMESim车速跟随情况Fig.4 ADVISOR and AMESim speed following conditions
电池SOC变化情况如图5所示。从图中可以看出,ADVISOR软件和AMESim软件仿真结果相仿,电池SOC的终值均接近64%,进一步说明了两者联合仿真的可行性。
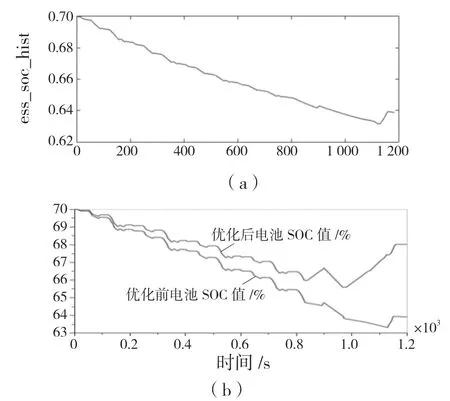
图5 电池SOC变化Fig.5 Changes of battery SOC
对比优化前后的SOC值可以发现,混合优化工具优化后的电池不仅省电,而且能较好地使电荷在循环结束后能维持在初始水平,仿真结果表明,混合优化工具可以有效地提升电池效能,延长电池的使用寿命。
发动机的转矩波动情况如图6所示。由图6可以看出,发动机的转矩在0~950 s间的转矩波动明显减少,但是在950 s左右时发动机转矩波动明显加剧,可能是因为气体流速增高,使得整车阻力增大,充气量也减少,发动机转速的升高导致发动机摩擦损失加大,从而引起转矩的较大波动。但是总体而言,汽车的转矩波动得到了明显的改善,驾驶员与乘客的乘坐舒适性也得到了很大的改善。
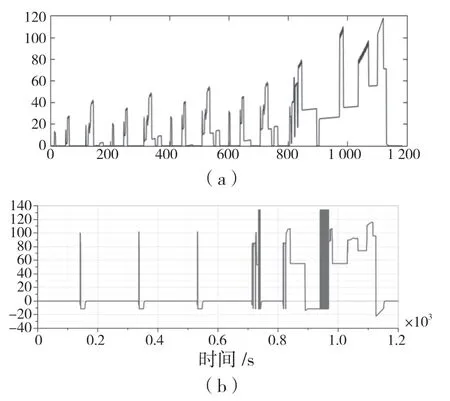
图6 发动机转矩波动Fig.6 Engine torque fluctuation
从 表2中可以看 出,ADVISOR软 件和AMESim软件能很好地对并联式混合动力汽车进行动力性和经济性的评价,且两者联合仿真得到的结果相仿,证明可通过AMEsim软件对ADVISOR中存储模型的优化的可行性。
比较优化前后的数据可以看出,并联式混合动力汽车的燃油经济性得到了明显的改善,百公里燃油消耗量减少了13.46%。在仿真中设置动力性评价指标设定为百公里加速时间、最高车速、行驶400 m所用时间和汽车在20 km/h车速下的最大爬坡度,得到的仿真结果可以看出,汽车的动力性能也得到了很大的改善。
3 结论
在循环工况NEDC条件下,对一种并联式混合动力汽车在ADVISOR和AMESim中进行联合仿真分析,然后使用了混合优化工具对整车进行优化。为了评判该方法的有效性,从动力性、经济性和乘坐舒适性3个方面对整车进行分析,可得到以下结论:
(1)本文首次将ADVISOR与AMESim软件进行联合仿真,在AMESim中搭建并联式混合动力汽车的模型,然后将ADVISOR中并联混合动力汽车的数据导入,并在ADVISOR和AMESim软件中进行仿真,仿真结果表明,两者的仿真结果相近,都能较为准确地反映车辆的性能,由于试验过程忽略了一些油耗和阻力因素,更精确的仿真结果可以通过试验标定的方法实现。
(2)使用AMESim中的混合优化工具对并联式混合动力汽车进行性能优化,发现整车在动力性、经济性和乘坐舒适性上都有显著的改善。燃油经济性的变化最为明显,与优化前相比,减少了13.46%的燃油消耗。
(3)混合优化工具可用于多种混合动力汽车架构,包括串联式、并联式和功率分流式各种类型的混合动力汽车。本文采用混合优化工具进行优化的方法,对后续串联式和功率分流式混合动力汽车的优化有一定的参考价值。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
消费导刊(2018年10期)2018-08-20
电机与控制学报(2018年9期)2018-05-14
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
客车技术与研究(2014年1期)2014-03-20
汽车电器(2014年8期)2014-02-28