锦屏二级水电站引水隧洞水下检测技术研究与应用
2021-06-02 00:48王继敏来记桃
大坝与安全 2021年1期
王继敏,来记桃
(雅砻江流域水电开发有限公司,四川成都,610051)
1 研究背景
近年来,我国建成的水利水电长大引水隧洞工程众多。这些隧洞工程普遍具有围岩地质条件复杂、洞线长、洞径大等特点,长年运行可能会出现裂缝、坍塌、露筋等典型缺陷,如不及时检查并处理可能会严重影响工程安全运行。常规放空检查存在成本高、风险大、效率低等突出问题,部分工程甚至不具备放空检修条件。受引水隧洞空间封闭、结构异型、高水压、弱光等复杂环境条件限制,潜水员水下检查面临人身安全风险,存在检查效率低、作业范围受限等问题。随着科学技术的发展,水下机器人检测技术在海洋工程近海勘探中得到了广泛应用[1-2],近年来逐渐应用到水电水利工程领域,但一般限于水电站水垫塘、河床、短距离引水、尾水隧洞工程应用[3],且检测手段相对单一。
雅砻江锦屏二级水电站引水隧洞工程是世界最大规模水工隧洞群,由4条长约17 km、直径约12 m的引水隧洞组成。工程建设期,最大实测地应力超过100 MPa,最大外水压力超过10 MPa,工程水文地质条件极其复杂。4条引水隧洞自运行以来,每两年放空检查一次,共经历了两轮放空检修,单次放空仅排水、充水就需要约14 d,检查耗时长、成本高。放空检查表明,引水隧洞总体运行情况良好,但隧洞末端富水带洞段局部衬砌结构及集渣坑淤积状况仍需要密切关注。为确保引水隧洞结构安全和发电机组运行稳定,减少频繁放空对隧洞结构的不利影响和发电效益的损失,迫切需要研究代替放空检查的水下检查方案进行隧洞例行检测,以便及时制定运维策略。
2 水下检测机器人系统
水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,通过搭载不同的作业工具,完成特定需求的水下作业,具有效率高、风险低、易于操作等优点,能弥补传统人工水下检测的不足[4]。无人遥控潜水器分为有缆遥控潜水器(ROV)、自主式潜水器(AUV)和复合型潜水器(ARV)。AUV依靠自身携带电池提供动力,自主进行水下检测作业,但水下续航能力和负载能力有限,不能实时显示水下检测信息,难以实现精细化检测作业。ARV虽然可以通过通讯光纤进行实时操控,但同样有自带供电电池面临的续航和负载等问题,且光纤易盘绕、折断,会导致ARV失去通讯和控制。基于锦屏二级水电站引水隧洞结构及环境特点,综合考虑长时间、长距离水下检测所需克服的巡航能力和安全回收问题,以及高精度检测需求,重点研究有缆遥控潜水器水下检测关键技术与工程实践。

图1 水下检测机器人系统组成示意图Fig.1 Composition of underwater detection robot system
ROV是通过脐带电缆将潜水器水下作业本体与水面遥控系统连接,由水面实时提供动力和通讯控制,操作人员在水面遥控潜水器工作,具有作业深度大、不受动力供给限制、工作时间长、设备支持功能强、数据实时传输显示以及无水下作业人身安全风险等优点。ROV水下检测机器人系统主要包括潜水器主机、脐带缆管理系统、地面控制系统和辅助保障系统四部分。ROV主机实施水下航行推进并提供检测设备搭载平台,搭载照明设备、声呐系统、高清摄像机等多种检测和作业设备以执行水下作业。脐带缆管理系统包括绞盘、脐带缆、TMS装置等,保障ROV主机的电力、通讯、数据传输。地面控制系统包括数据存储设备、遥控操作系统、数据分析与处理计算机系统等,实现ROV主机的参数监控、指令收发、数据存储与分析等,是整个水下机器人系统的大脑[5-6]。辅助保障系统包括动力电源、通讯基站、吊运设备和应急系统等。
3 关键技术方案研究
3.1 潜水器载体设计
潜水器载体是水下检测传感器集成的水下移动终端,统筹兼顾ROV搭载设备、检测能力、动力与功耗、安全收放、工程边界等技术要求。针对锦屏二级水电站引水隧洞检测距离长、进出口通道狭小等特征,潜水器载体采用小体积框架设计,采用零浮力、抗拉、耐磨、传输能力强的光电复合脐带电缆进行供电、通讯控制和应急回收牵引[7],在载体上安装四个水平矢量推进器和两个垂直向推进器,以增强长距离工作的动力保障。

表1 ROV主要技术指标统计表Table 1 Statistical table of main technical indexes of ROV
为了解决长距离、小型化升降压供电难题,电力传输采用400 Hz中频升降压电能传输技术。脐带缆按照5 km进行设计,传输最大有功功率达5.4 kW,满足水下检测机器人所需总功率要求,抗拉能力达2 t。通过研究和优化,确定水下检测机器人尺寸为长1.53 m、宽0.81 m、高0.75 m,以满足进出直径2.1 m的调压室阻抗孔的限制要求。
3.2 水下检测方案与定位技术
3.2.1 全覆盖检测方案
引水隧洞洞径10.8~11.8 m,结构型式多变,水体能见度低,水下摄像视角窄。为实现大直径隧洞内壁全覆盖检测,研究采用声呐扫描普查和光学摄像详查相结合的隧洞全覆盖检测方案,即先通过声学检测为主、光学检测为辅的方式快速普查并判断缺陷规模和部位,再通过ROV抵近缺陷部位做进一步光学摄像详查、勘验。
高精度声呐扫描普查是全覆盖检测的关键。通过调研和联合研制,引进了首台移动式隧洞专用Blueview-T2250三维扫描声呐系统,可实现隧洞结构的实时三维扫测并提供连续的高分辨率图像,分辨率达6 mm,有效探测距离10 m。T2250系统使用高频率低功耗的声学多波束技术[8],可随ROV行进方向以2.25 MHz的频率进行移动式三维扫描,发出2100个重叠窄波束连续采集隧洞360°范围声波反射点云数据,实时创建一个密集的三维点云图像,清晰展示隧洞结构细节,以进行损伤评估。通过多波束三维成像声呐全覆盖扫描,解译分析后对重点关注部位进行ROV抵近摄像、激光测距等精细量测,从而实现引水隧洞更高精度的表观全覆盖高效检测。
3.2.2 水下定位技术
在海洋或水库等开阔水域检测中,通常采用超短基线定位技术(USBL)进行水下定位。引水隧洞为相对封闭空间结构,边界繁杂,而USBL受多次反射波干扰及密集铁磁性结构设施的综合影响,定位误差较大。惯性导航定位系统(Inertial Navigation System,INS)是一种不依赖外部信息、也不向外部辐射能量的自主式导航系统,其工作环境不仅包括空中、地面,还可以在水下。多普勒计程仪(Doppler Velocity Log,DVL)利用发射的声波和接收的水底反射波之间的多普勒频移测量潜水器相对于水底的航速和累计航程,能够在没有外部陆基或星基定位信息支持下实现封闭空间内的准确定位与导航[9-10]。研究确定引入高精度INS与DVL,结合缆长计数器、导引声呐、高度计等多项定位校正设备进行水下定位,平面定位精度可达50 cm、轴线精度为航行距离的2‰。ROV水下检测中,还可利用隧洞内可识别的、具有位置信息的特征点,对水下定位进行校正,以减小惯性导航系统定位累积误差。
3.3 复杂工程边界条件ROV布放
电站上游调压室井筒及2.1 m直径阻抗孔是ROV进入引水隧洞末端的唯一通道。上游调压室竖井总高139 m,开挖直径23 m,调压室分流墩上部阻抗板厚3 m,阻抗板两侧共布置四个直径2.1 m的圆形阻抗孔。ROV需穿过上游调压室阻抗孔到达隧洞底板,经直角转弯往上游方向航行,脐带缆在阻抗孔边缘易产生剐蹭破损甚至断裂,影响ROV供电与通讯,存在一定的安全隐患。为消除直角结构对脐带缆的剐蹭损伤,降低弯段处与脐带缆的摩擦力[11],保障ROV的安全运行,设计了一种适应该阻抗孔的中继引导装置(TMS)。TMS自上而下由托盘、圆柱框架、导向滑轮和导向定位锥组成,托盘将该装置卡在阻抗孔上端,圆柱框架落入3 m厚阻抗孔中,导向滑轮控制脐带缆方向并增大转弯半径,导向定位锥在吊放时便于导向并对准阻抗孔口,并在TMS装置上安装灯光、视频摄像,以观察TMS下放状态和潜水器行进状况。
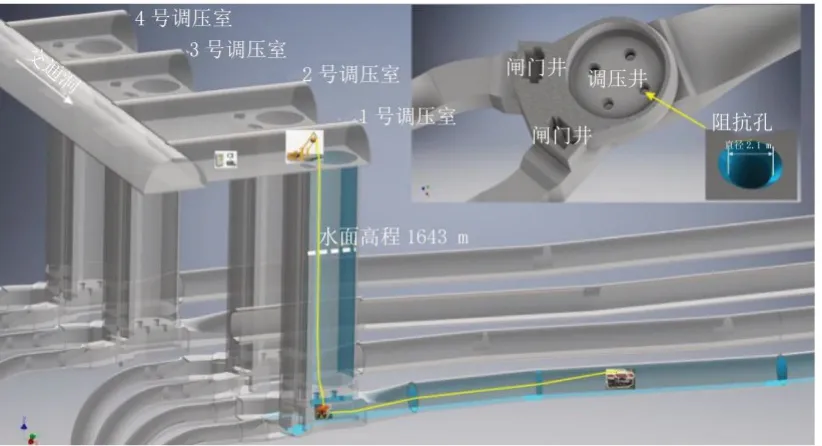
图2 上游调压室及阻抗孔布置示意图Fig.2 Layout of the upstream surge chambers and impedance hole

图3 阻抗孔布放TMS装置示意图Fig.3 Schematic diagram of TMS device in impedance hole
3.4 水下检测实时监控技术
操控人员基于ROV姿态传感器监测数据和检测信息感知,判断ROV行进状态和隧洞检测环境,在隧洞结构多变、空间密闭、能见度低等复杂水下环境中,检测作业依然存在较大安全风险,时常需要借助隧洞结构特征进行分析、校验,以保障检测的高效全面。基于此,根据隧洞BIM模型与前期已有的检测数据,构建典型作业区三维场景和作业目标模型数据库,引入VR实时可视化重构技术,融合模型数据库数据和ROV实时回传的水下地形点云数据,构建高逼真的ROV水下作业虚拟环境,实现全方位视角切换监控ROV实时作业状态,可以极大提高水下作业安全保障和检测效率。

图4 ROV水下检测状态监控及仿真模拟Fig.4 State monitoring and simulation of ROV underwater de⁃tection
4 工程检测应用
4.1 工程概况
雅砻江锦屏二级水电站为一低闸、长隧洞、大容量引水式电站,利用长150 km大河湾的天然落差,通过长约16.7 km的引水隧洞截弯取直,获得水头约310 m。电站总装机容量4800 MW,多年平均发电量242.3亿kW·h。4条引水隧洞具有埋深大、洞线长、洞径大等特点,工程水文地质条件极其复杂,为世界埋深最大、规模最大的水工隧洞群工程。4条引水隧洞中心距60 m,隧洞底坡3.65‰,自进口底板高程1618.00 m降至高程1564.70 m与上游调压室相接,开挖直径12.4~14.3 m,衬后隧洞跨度10.8~11.8 m。引水隧洞末端15 km桩号附近各布置一组集渣坑,各组集渣坑均由左右两个集渣坑组成,每个集渣坑设3室。
4.2 水下检测目的与内容
为及时、全面掌握引水隧洞结构运行状况,基于水下检测技术调研情况和工程现阶段运行实际,以引水隧洞末端水下检测为切入点,探索常态化例行检查手段。检查内容为引水隧洞末端衬砌混凝土表观有无新增破损、剥落、露筋、表面附着等缺陷,缺陷修复部位运行情况,以及集渣坑淤积状况。重点检查引水隧洞桩号15+200 m附近隧洞段混凝土衬砌运行情况及下游集渣坑淤积状况。
4.3 现场检测实施
ROV与TMS装置经引水隧洞末端上游调压室井筒吊放入水并下潜约70 m,TMS固定在ϕ2.1 m阻抗孔边壁,ROV穿过阻抗孔进入引水隧洞,向上游方向分全覆盖普查和局部详查2个阶段进行检测。为确保现场检测顺利进行,现场配备了2台检测ROV和1台救援ROV,该多设备、多模式作业潜水器方案设计为引水隧洞水下检测提供了足够的安全冗余保障。
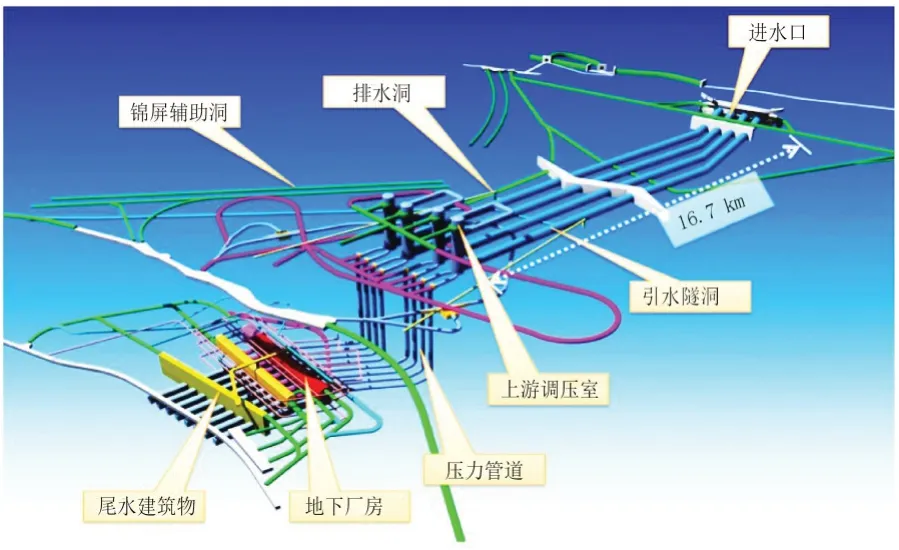
图5 锦屏二级水电站地下引水发电系统隧洞群布置示意图Fig.5 Layout of underground water diversion tunnels and pow⁃er generation system at JinpingⅡhydropower station
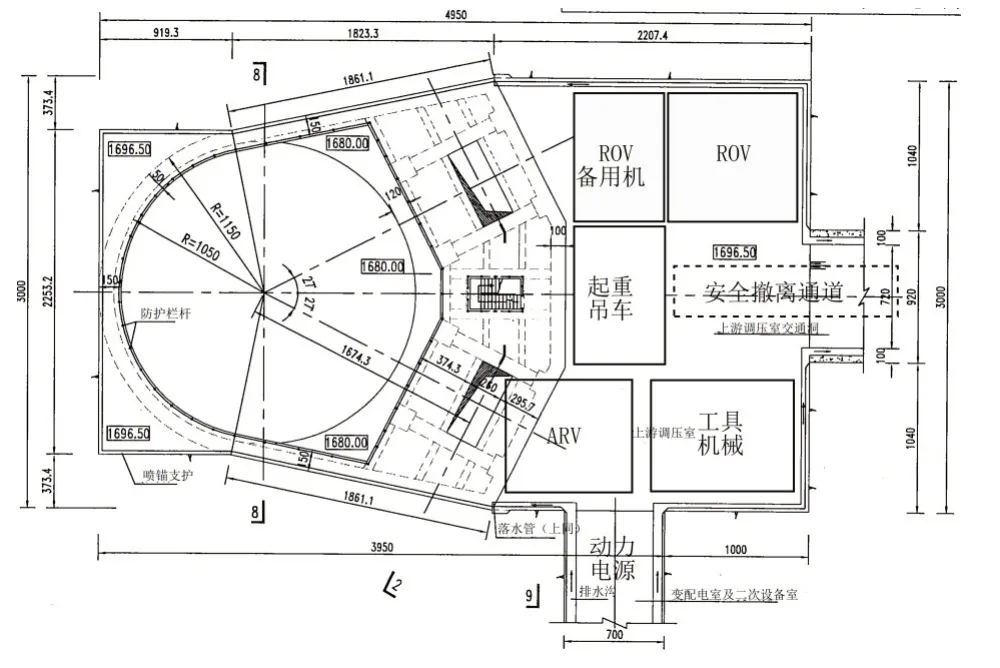
图6 检测现场布置图Fig.6 Layout of detection site
4.4 水下检测成果及评价
2018年11 月至2020年1月,结合发电机组停机检修,共计完成了6次锦屏二级水电站4条引水隧洞末端水下检测,其中1号、2号引水隧洞完成了两次水下检测对比,3号、4号引水隧洞完成了水下检测与放空检查对比验证。单次水下检测时间约3 d,引水隧洞最大检测距离达2.3 km。检测结果表明,引水隧洞末端总体运行情况良好(三维声呐扫描典型成果见图7),未发现影响隧洞运行安全的隐患和缺陷,水下检测结果与放空检查基本吻合,较好地指导了引水隧洞的运行检修维护工作,实现了常态化水下无人检测。针对重点关注的15+200 m附近洞段和末端集渣坑运行状况,总体情况如下。

图7 引水隧洞水下三维声呐扫描典型成果图Fig.7 Typical result of underwater 3D sonar scanning of diver⁃sion tunnel
4.4.1 引水隧洞混凝土结构表观缺陷检查
通过全覆盖普查、抵近详查对比分析,2018年12月,1号引水隧洞15+210 m附近隧洞底部混凝土保护层局部剥落约6 m2,局部环向钢筋出露;2019年12月,缺陷范围扩大至32 m2,剥落深度未见明显变化。
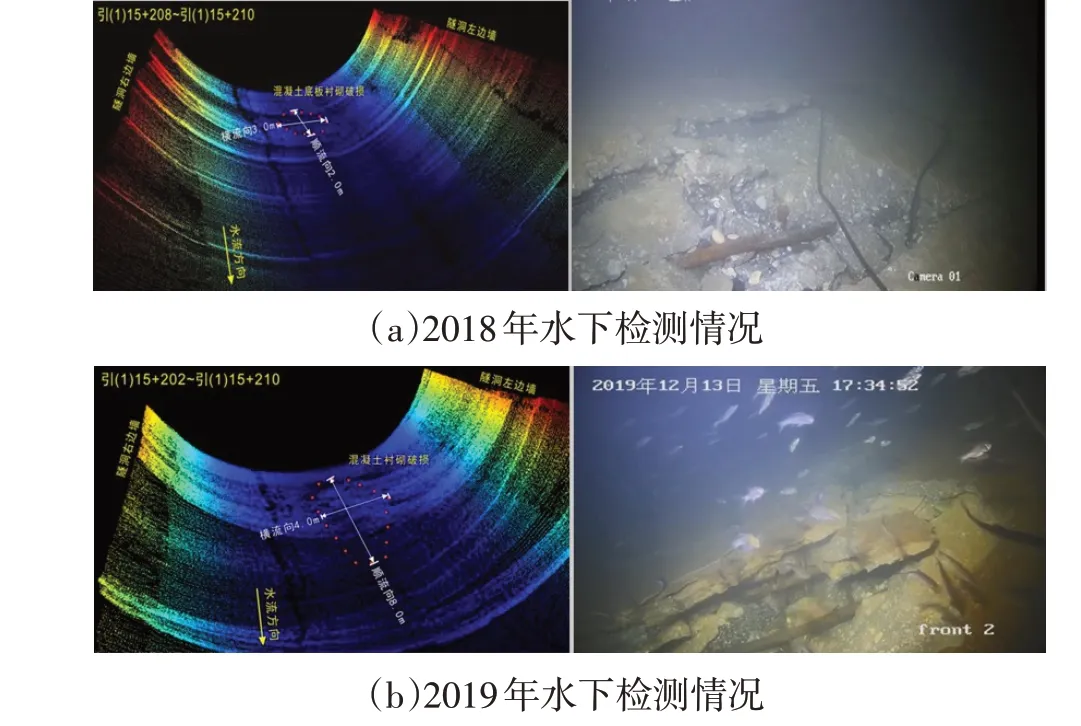
图8 1号引水隧洞15+210 m段混凝土保护层脱落范围变化对比(2018~2019年)Fig.8 Peeling of concrete cover in the 15+210 m section of No.1 diversion tunnel(2018~2019)
2号引水隧洞运行状况良好,两次对比检测未见明显变化。检测3号引水隧洞发现底板混凝土局部磨蚀露筋,主要分布在桩号16+100 m、15+950 m和14+900 m处,与次月计划外放空检查结果一致,典型缺陷水下检测与放空检查对比见图9。4号引水隧洞仅发现隧洞底板混凝土局部磨蚀,未见混凝土保护层脱落、钢筋出露等情况,且当月进行了计划内放空检查,检查结果与水下检测一致。
4.4.2 集渣坑淤积状况
2018年12 月和2019年12月两次水下检测1号引水隧洞下游集渣坑表明,经过1年的运行,集渣坑淤积体积由17.4%增至25.9%,沉渣空间仍较大。
2号引水隧洞集渣坑除下游3号沉渣室外,其余5个沉渣室均已基本淤满,淤积总量占集渣坑总体积的91.4%。2019年11月再次检查发现,淤积略有增加,总量占集渣坑总体积的97%。
3号、4号引水隧洞集渣坑的6个沉渣室均已淤满,并及时进行了放空检查及清理,放空检查淤积情况与水下检测结果基本吻合。
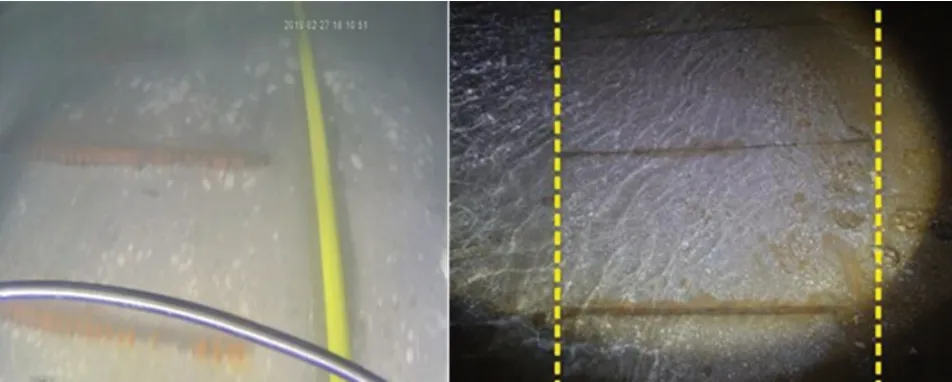
图9 3号引水隧洞底板混凝土磨损水下检测与放空检查对比(2019年)Fig.9 Comparison between underwater detection and empty⁃ing inspection of abrasion of bottom slab concrete in diversion tunnel No.3(2019)
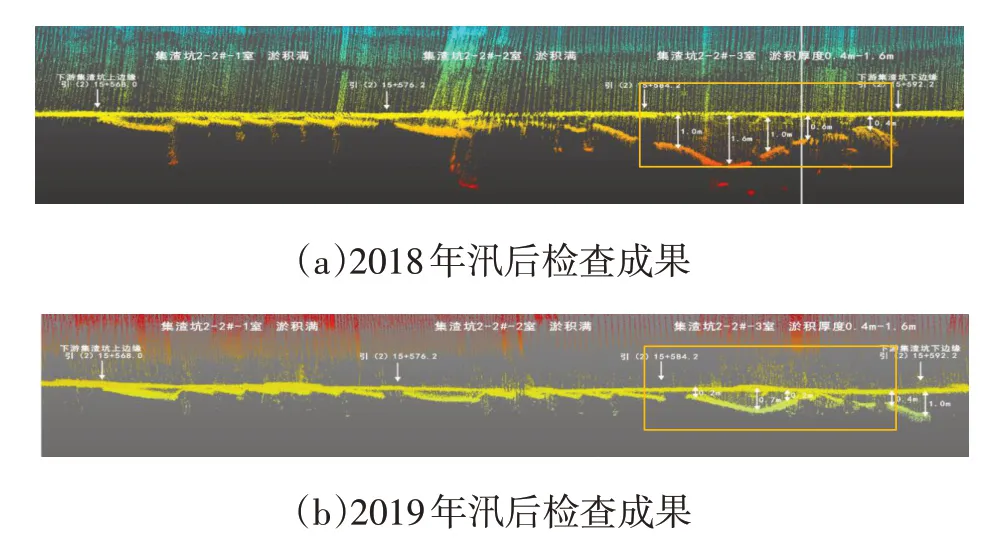
图10 2号引水隧洞下游集渣坑沉渣室淤积水下三维声呐扫描纵断面图Fig.10 Underwater 3D sonar scanning profile of deposition in the settling chamber of sediment pit downstream of diversion tunnel No.2

图11 3号引水隧洞集渣坑沉渣室水下检测与放空检查对比Fig.11 Comparison between underwater detection and empty⁃ing inspection of the settling chamber of sediment pit in diver⁃sion tunnel No.3
5 结论与展望
(1)针对大直径、长隧洞水下检测需求和技术难题,创新性开展了潜水器载体长距离巡检设计与控制、大断面全覆盖高精度检测、水下精准定位、复杂工程边界条件布放与回收等关键技术方案研究,形成了大直径、长隧洞水下全覆盖检测成套装备和解决方案。
(2)采用ROV首次完成了锦屏二级引水隧洞末端2 km级长度水下全覆盖常态化检测,查明了隧洞末端衬砌结构运行情况及集渣坑淤积状况,检测成果直观、可靠,有效指导了引水隧洞运维策略。
(3)对于更长距离的引水隧洞多传感器组合水下检测,以及进一步提高检测精度,还需要依靠科技发展,进一步研究探索。
猜你喜欢
建材发展导向(2021年12期)2021-07-22
水泵技术(2021年2期)2021-01-24
黑龙江水利科技(2020年8期)2021-01-21
中国船检(2019年6期)2019-11-29
中国军转民(2017年9期)2017-12-19
故事大王(2016年7期)2016-09-22
中国水利(2015年16期)2015-02-28
儿童故事画报(2013年3期)2013-06-24
小哥白尼·军事科学画报(2009年9期)2009-09-14