
电动汽车电子差速控制策略研究
2021-06-08 09:58王学东黄宏成
传动技术 2021年1期
王学东 黄宏成
(上海交通大学机械与动力工程学院 上海 200240)
随着汽车产业的发展[1],燃油汽车给人们带来便利的同时也带来一系列环境问题[2]。在全球电子化、信息化、倡导绿色环保的大背景下,轮毂电机驱动的电动汽车便应运而生。但在机械结构改变的大前提下,需要保证电子差速系统的安全可靠性,这是汽车安全的前提。
现在的电动汽车绝大多数依旧是以集中动力形式存在的,通过一个或多个电机工作,再经由差速机构将动力传递给各个车轮。在公路运输系统中,差速器在防止车辆在弯曲道路上发生侧滑起着重要作用。实际上,大部分汽车依旧是采用机械差速器的,但是机械差速器不断增长的重量使得其结构变得格外复杂。而且,机械差速并不适用于两个后轮分别独立驱动的情况。
由于差速系统是影响汽车稳定的重要因素[3],因而21世纪以来,采用分散的动力源的新型动力传递结构对汽车行业的影响愈发深远。与传统的集中动力不同,该设计的每个动力源各自提供动力,在车轮边或轮内配上电机,改变了传统汽车的驱动形式(省去了汽车一系列的机械装置,如离合器、变速器、发动机、传动轴等)。
国内关于电动汽车的研究起步较晚,但通过多年的研究与累积,也取得了丰富的成果。如武汉理工大学的朱传奇进行电动轮电子差速与转矩分配控制研究,提出基于稳定性的转矩分配控制的策略[4]。张兴宇通过对电机驱动理论的分析,确定对电动汽车前轮单极性、后轮双极性的控制方案[5]。重庆大学的武龙星基于PMSM对纯电动汽车差速转向控制策略进行研究,实现了SVPWM算法[6]。浙江大学的马浩军考虑了车辆转弯车身质心的侧偏对车轮垂直载荷转移产生的影响,分析了簧上质量的离心力、车身质心偏移对车轮垂直载荷转移产生的影响,同时采用Carsim软件建立动力学模型,使用Simulink建立控制策略,最后进行联合仿真[7]。吴浩以提高控制系统的鲁棒性和稳定性的角度为出发点,研究鲁棒控制策略[8]。江苏大学的张勇提出了多目标综合控制策略,对高速低速采取不同的控制策略,高速采用模糊控制器,低速采用基于阿克曼模型的控制器[9]。王吴杰基于车辆稳态转向时横摆角速度对方向盘转角输入的响应特性,利用PID控制算法进行转矩控制,从而实现差速转向[10]。
而国外学者很早就开始了对电动汽车的研究。随着轮毂电机的应用,电子差速也成了国外学者长期研究的一个课题。Guo J等人计算目标PID控制保持车辆稳定所需的时刻,提出了一个模糊的方法来控制电子稳定程序和主动转向,并使用遗传算法、优化控制规则以确保控制的准确性,通过计算机在两种不同的运行条件下运行仿真来评估控制系统[11],同年通过协调可变扭矩分配(VTD)和电子稳定程序(ESP)的控制来设计集成车辆动态控制系统[12]。Bosch R等人通过分析电子控制系统对车辆主动安全的作用提出电子控制系统对于汽车动力学的影响[13],Yoichi Hori等人于2012年对电动汽车的纵向驱动力分配控制和横摆运动控制进行了广泛的研究, 并且取得了较好的成绩[14]。
早期众多学者基于传统阿克曼模型进行研究,但阿克曼模型只针对线性时不变系统有良好的匹配性,对于高速行驶的汽车,需要考虑更多方面的影响因素。因此,基于转矩的电子差速是现阶段研究的重点方向。
1 电动汽车多自由度动力学建模及仿真
1.1 电动汽车转向动力学模型
1.1.1 多自由度汽车动力学模型
汽车的转向动力学性能是指汽车通过驾驶人员对转向盘输入的响应,而其评判标准是汽车能否遵循驾驶人员的意图进行转向,在方向盘转角的输入下,通过一系列转向机构改变车轮的转角,使汽车按照预定轨迹行驶。本文研究的电动汽车转向差速系统涉及到汽车操纵稳定性,可以得到车辆七自由度动力学模型,如图1所示。

图1 七自由度汽车模型Fig.1 7-DOF vehicle model
本文通过Carsim和Simulink联合进行仿真,Carsim进行整车模型的搭建,Simulink进行控制器相关的建模。在低速情况下采用电子差速模型,通过反馈的轮速,以及期望转矩和方向盘转角,输出控制转矩分配给两个驱动轮,从而改善电动汽车的转向性能。而在高速情况下,横摆角速度控制器接受期望的转矩、方向盘转角、反馈的车速以及实时的横摆角速度和质心侧偏角等数据。将横摆角速度和质心侧偏角与期望值进行对比,通过控制器得到相应的横摆力矩,分配给两个驱动轮,同样改善汽车转向性能。Carsim软件模型构建思路如图2所示。

图2 模型构建思路Fig.2 Model construction ideas
1.1.2 电动汽车参数
为了更贴近于现实,本文采取实车参数建模的方式。将某电动汽车整车参数进行整理,在Carsim中相应的模块中进行设置,使得Carsim的汽车模型更加合理。某款车参数如表1所示。

表1 某电动汽车参数
整车尺寸参数在Carsim中的Vehicle Body模块中设置,具体设置如下图所示。

图3 Carsim整车参数设置Fig.3 Parameters setting in Carsim
此外,由于电动汽车采用轮毂电机直接对车轮进行驱动,故没有传统燃油车的一系列传动装置。在Carsim中传动系统设置如图4所示。

图4 Carsim传动系统设置Fig.4 Transmission system setting in Carsim
车身部分的空气动力学参数和悬架参数都采取默认设置,同时可以在Carsim中的procedures设置仿真的具体参数,包括车速的选择、刹车系统、转向系统、方向盘转角、仿真起止时间等设置。另外在procedures中可以对路面进行设置,本文采用的路面是一平方公里的正方形路面,路面附着系数恒定为0.85,路面设置如图5所示。

图5 Carsim路面设置Fig.5 Road setting in Carsim
1.2 轮毂电机模型
1.2.1 无刷直流电机数学模型
轮毂电机是伴随现代控制技术和永磁电机的发展而出现的新产物。轮毂电机在电动汽车的发展中起到了巨大的作用。按驱动方式来分,可以分为直驱和减速驱动两类。本文选择无刷直流电机作为轮毂电机,向驱动轮输入驱动转矩,由于Carsim中无现成的轮毂电机可用,故需要在Simulink中对轮毂电机进行建模。
无刷直流电机等效电路图如图6所示,其中Ua、Ub、Uc为三相输入电压;ia、ib、ic为三相定子电流;ea、eb、ec为三相电动势;R为定子每项电阻;Ls-m为定子每项绕组的自感和互感的差值。

图6 无刷直流电机等效电路图Fig.6 Equivalent circuit diagram of brushless DC motor
永磁无刷电机采用星型(Y)接法,根据等效电路图得到三相电压平衡方程。

(1)
令b与a相连通,得三相电压平衡方程转变为:
(2)
简化后得到:
(3)
根据电力拖动原理,得到:
ea=-eb=keω
(4)
(5)
(6)
式中,TL是电机上的负载转矩,Te是轮毂电机的输出转矩,ke是反电动势系数,J是电机的转动惯量,ω是电机的转动角速度。
从上式得到无刷直流电机状态方程为:
(7)
(8)
根据上式得到动态结构图如图所示。

图7 电机动态结构图Fig.7 Dynamic structure diagram of motor
1.2.2 电机调速方案分析
搭载声、光、电、磁等多种传感设备,通过嵌入式计算机技术、传感器技术、无线通讯技术和智能控制多种技术对信息进行融合采集分析[3]。
电机必须要有调速系统,目的是使电机在某一种负载情况下通过改变电源的参数来改变电机机械特性,使其达到恒速或者变速的目的。
电机调速方法有三种方案,本文采用调节电压的方式。此外,设计单闭环电流调节系统从而实现电流反馈控制。单闭环转矩控制系统框图如图8所示。电流反馈后调节器采用PID控制器实现转矩闭环控制。

图8 单闭环转矩控制系统框图Fig.8 Block diagram of single closed loop torque control system
1.2.3 无刷直流电机仿真分析
选取某一无刷直流电机,得到的具体参数如下表所示。

表2 某无刷直流电机参数
在Simulink中建立仿真模型。如图2.20所示。
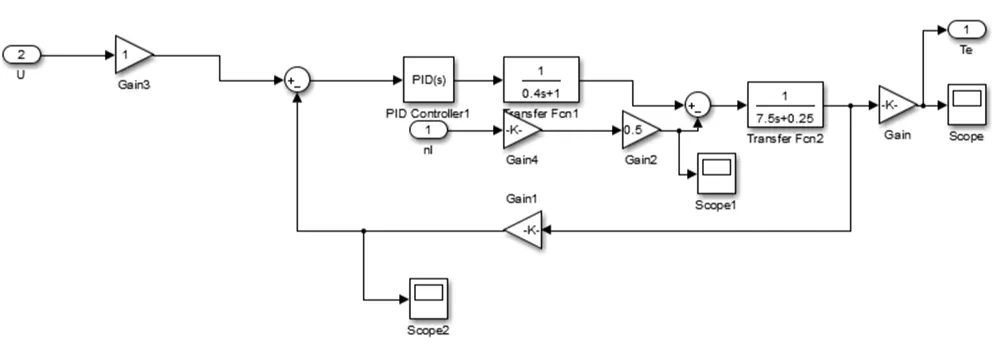
图10 轮毂电机Simulink仿真模型Fig.10 Simulink simulation model of hub motor
两个输入分别是期望的转矩和车辆模型反馈的车轮转速,输出为给与车轮的直接转矩。在该模型中采用PID控制器作为电流调节器,使响应变得迅速,准确,并且具有较小的超调量。
2 电子差速控制器设计及仿真
2.1 电动汽车的电子差速控制
为了模拟传统汽车的差速效果,需要在电动汽车上进行电子差速控制的研究。电子差速控制指的是通过控制器来协调控制各个驱动轮之间的驱动力,在车辆转向行驶时,左右侧车轮行驶的距离不同,传统汽车采用机械差速器使其满足差速行驶的条件,而在电动汽车中,需要通过电子差速器来协调电机产生不同的驱动转矩使车轮以不同速度行驶。如今电动汽车的电子差速控制基本有多种方法,本文研究的是基于阿克曼模型的转矩控制和基于直接横摆力矩控制的电子差速控制策略研究。
2.2 基于阿克曼模型的差速控制策略研究
目前对于汽车操纵稳定性评价有很多试验方法。而一般而言,在仿真中有一定的评价指标。现常取侧向加速度ay、侧偏角β、横摆角速度γ、纵向速度vx作为评价指标。

图11 阿克曼转向模型Fig.11 Ackermann steering model
2.2.1 阿克曼模型电子差速控制策略
一般而言,轮胎的滑转主要是由轮胎胎面的弹性变形产生的,所以在开始时车轮转矩与驱动力与滑转率成线性关系。当车轮转矩和驱动力再进一步增加的时候,轮胎胎面在地面上滑转,此时驱动力和滑转率呈非线性关系。大量试验表明,轮胎在硬路面上,滑转率常在15%~20%附近时驱动力能够达到最大值。
但在实际路面上汽车行驶的状态是十分复杂的,存在不确定的扰动,只通过检测路面来确定驱动轮理想滑移率是十分困难的,所以本文采用转矩控制的方式,来搭建阿克曼转向模型,采用前人的经验公式得到转矩分配比,再将总的转矩分配到两个驱动轮上,实现电子差速的功能。
建立的Simulink转矩分配比模块如下:

图12 转矩分配比模块Fig.12 Torque distribution ratio module
转矩差值计算模块如下:

图13 转矩差值计算模块Fig.13 Torque difference calculation module
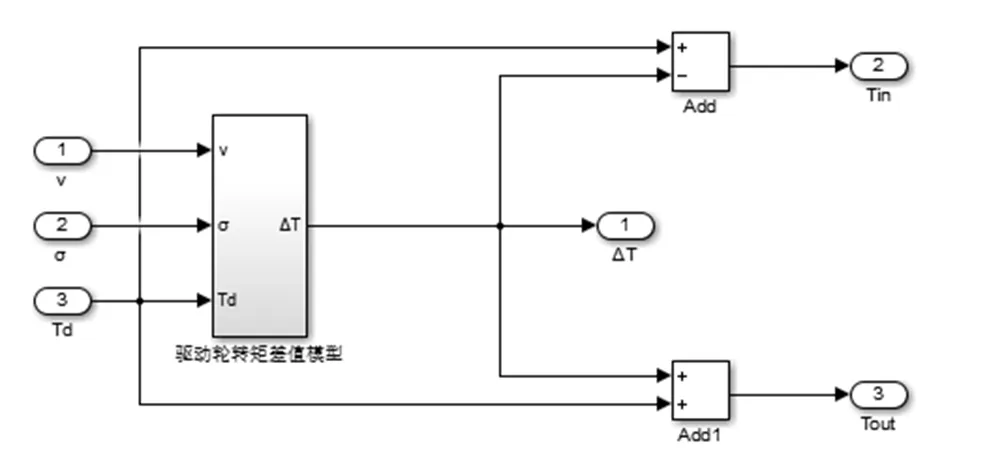
图14 左右车轮驱动转矩计算模块Fig.14 Driving torque calculation module of left and right wheels
根据控制器控制策略,基于阿克曼模型的电子差速控制器仿真模型总体框图如图15所示。

图15 EDS总体框图Fig.15 Overall diagram of EDS
由上图可知,基于阿克曼模型的电子差速控制策略由三大模块组成,分别是Carsim整车模型、轮毂电机模块以及驱动转矩计算模块。基于阿克曼模型的电子差速控制模型如上,其中Carsim输出的参数有四个,分别是方向盘的转角、左右驱动轮的转速以及实时的车速反馈。
2.3 基于直接横摆力矩控制策略
阿克曼模型在低速情况下有较好的特性,但是在高速情况下容易出现失稳的情况,因此本文引入直接横摆力矩控制的差速控制策略。
2.3.1 车身稳定性判定模型
车身稳定性的两个影响关键因素是横摆角速度和质心侧偏角β。质心侧偏角β对侧向力和横摆力矩产生影响,而横摆角速度大小对不足转向和过多转向产生影响。汽车在转向过程中会受到各种因素的影响,这些影响会导致轮胎收到的侧向力和轮胎的侧偏角不再是线性关系。对汽车的车身进行稳定性控制时,本文采取实际值与期望值的差值作为稳定性判定的依据,使对象的实际值能够尽量趋近于期望值,让汽车尽可能保持在线性的状态,此时可以提高汽车车身的稳定。
对于车辆稳定性判别的方法,之前已经做了众多研究。其中一种就是将横摆角速度和质心侧偏角控制在阈值中,在横摆角速度判定时,横摆角速度的实际值与理想值的差值与车速相关,选择如下值作为控制阈值。

表3 横摆角速度阈值
在质心侧偏角的判定中,大多采用如下的约束关系:
(9)

表4 质心侧偏角边界稳定性常数
其中,B1、B2是稳定性边界常数,其值与附着系数有关,可以控制车轮的转矩输出,进而可以在车辆操作稳定性上避免过多转向和不足转向。
2.3.2 模糊控制理论
模糊控制系统由四部分组成。参数模糊化—建立模糊规则—进行模糊推理—模糊结果清晰化。
基于模糊控制理论,对DYC模糊控制器进行设计。首先是确定输入和输出变量。第一个输入取横摆角速度偏差e(y)。第二个输入取质心侧偏角偏差e(b)。将得到的横摆力偶矩Mz作为输出。建立如下的二维模糊控制器。
其中,输入1为质心侧偏角偏差:Input1:e(b)=b-bd;输入2为横摆角速度偏差:Input2:e(y)=y-yd;输出为直接横摆力偶矩:Output:Mz。

图16 模糊控制两输入单输出模型Fig.16 Two input single output model of fuzzy control
对于模糊子集与隶属函数:三个模糊集均取NB(负大)、NM(负中)、NS(负小)、ZE(0)、PS(正小)、PM(正中)、PB(正大)。隶属函数采取三角形函数形式,使得控制器更加简单有效。
模糊规则均取:
1.小于零: NM(负中)、NS(负小)、NB(负大);2.等于零:ZE(0);大于零:3. PM(正中)、PS(正小)、PB(正大)。
质心侧偏角和横摆角速度模糊集取值如图17,模糊论域为[-6,6]。

图17 质心侧偏角和横摆角速度模糊Fig.17 Centroid sideslip angle and yaw rate ambiguity
横摆力矩模糊集取值如图18,模糊论域为[-6,6]。

图18 横摆力矩模糊Fig.18 Yaw moment ambiguity
模糊规则为,常使用条件语句来描述规则,例如“if A and B then C”。对于双输入单输出的系统,以e(y)为NB为例,若e(y)变化为NB、NM、NS时,此时误差会增大。为了消除存在的误差并且抑制误差的增大,应该增大横摆力矩。所以横摆力矩取PB。同理可推得其余的控制规则,汇总后得到的模糊控制规则表如表5所示。

表5 模糊控制规则表
反模糊化要将模糊量转化为清晰量,清晰化后的三维视图如图19所示。
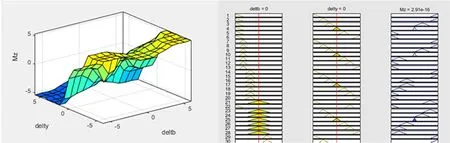
图19 模糊规则曲面和图表Fig.19 Fuzzy regular surface and graph
建立的模糊控制器在Carsim和Simulink联合仿真时进行调用,经过反模糊化后输出的变量依旧是在其模糊论域中,需要通过相应的比例因子转化为基本论域,最终得到输出变量为Mz。输出的变量是横摆力偶矩,要通过横摆力矩转换模块使得横摆力矩转换为两侧车轮之间驱动力的差值。
2.3.3 横摆力矩控制模型电子差速控制策略
建立了模糊控制器之后,开始搭建横摆力矩的控制器,模糊控制器第一个输入是实际横摆角速度和理想横摆角速度的差值。第二个输入是实际质心侧偏角和理想质心侧偏角的差值。通过两个差值经过模糊控制器,按照模糊规则进行模糊化处理和清晰化处理,得到相应的调整横摆力矩。横摆力矩再经过横摆力矩转换模块转换成两个车轮的转矩差值,经过外部计算得到实际的输入转矩。
横摆力矩仿真模型如图20。理想质心侧偏角和理想横摆角速度的计算均需要接收车辆的车速信号和方向盘转角信号,通过相对质心侧偏角和相对横摆角速度的输入,经由模糊化和清晰化,得到相应的横摆力矩,最后转换成为左右驱动轮的驱动力差值。

图20 模糊控制器搭建模型Fig.20 Modeling of fuzzy controller
理想质心侧偏角计算模块如下如图21所示。

图21 理想质心侧偏角计算模块Fig.21 Calculation module of ideal centroid sideslip angle
理想横摆角速度模块的计算如图22所示。

图22 理想横摆角速度计算模块Fig.22 Calculation module of ideal yaw rate
横摆力偶矩转换模块如下。即横摆力矩与驱动转矩差值关系模块如图23所示。

图23 转矩转换模块Fig.23 Torque conversion module
横摆力矩控制总模型如图24所示。

图24 DYC总体框架Fig.24 Overall framework of DYC
由模型得知Carsim输出六个参数给Simulink控制器模型,分别是方向盘转角、实时横摆角速度、实时的车速、实时的质心侧偏角以及左右后轮的转速。计算出左右车轮的转矩差值,在期望力矩的输入下,进行数学运算得到实际该输入的转矩信号,经过转换为轮毂电机的电压信号,得出轮毂电机输出的转矩值直接输入到Carsim中,用以驱动左右驱动轮。
3 电子差速控制系统仿真验证
在完成汽车动力学以及基于两种不同理论的控制器的建模后,进行Carsim与Simulink的联合仿真。通过不同控制器在不同条件下的仿真,对比各个仿真结果。
3.1 低速大角度行驶
第一种工况是低速大角度转向行驶,汽车以20 km/h的初速度行驶,驾驶员给踏板施加50 N·m的驱动转矩,行驶在附着系数为0.85的路面上,3 s时刻时,一秒内给方向盘施加180°的转角,并且保持不动,观察两个控制器的控制效果。车速仿真图如图25所示。

图25 低速大弯车速图Fig.25 Speed diagram of low speed bigcurve
从车速图中可以得知,在汽车开始转向行驶时,左右车轮轮速产生区别,但无论是基于阿克曼模型的电子差速控制器还是直接横摆力偶矩控制的电子差速器模型,在低速情况下车轮的速度几乎相同。车速的曲线基本上重合,说明低速情况下,两种控制器控制效果基本相同。
此外,由转矩图可知,在低速情况下,两种电子差速控制器所产生的驱动力基本相同。阿克曼模型中转矩分配比的计算值和直接横摆力矩分配的转矩差值相同,起到的控制效果也相同。

图26 低速大弯驱动转矩图Fig.26 Torque diagram of low speed large bend drive
下图是两种控制器下的质心侧偏角观察图,由图中可以得到在质心侧偏角的控制上,两种控制器的效果相似。图中质心侧偏角大概在1.8 deg,处在稳态转向状态中。所以两种差速控制器对于汽车在低速转向都有较好的控制效果。

图27 低速大弯质心侧偏角图Fig.27 Sideslip angle diagram of low speed large bend centroid
横摆角速度是影响操纵稳定性的重要参数,由图28中可以发现横摆角速度曲线基本重合,故两种差速器在低速大弯工况下,对于横摆角速度的控制效果也相似。另外横摆角速度的值大约为11 deg/s=0.191 rad/s,根据上文的横摆角速度失稳阈值可知,0.191 rad/s<0.25 rad/s,故横摆角速度均处于安全范围。
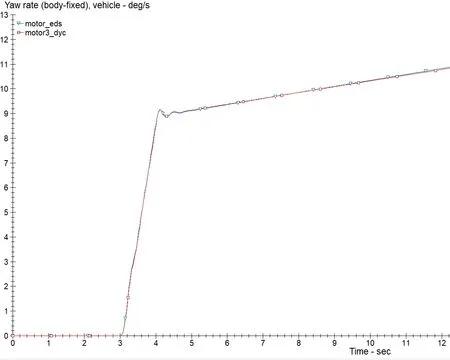
图28 低速大弯横摆角速度图Fig.28 Yaw rate diagram of low speed large bend
上图29是车辆行驶轨迹图,两种控制器在低速情况下对于汽车的控制效果都大致相同,所以汽车的动力学参数也大致相同,因此两车的行驶轨迹也极其相近,几乎重合。

图29 低速大弯行车轨迹图Fig.29 Low speed and big curve driving track diagram
综上分析,在低速情况下时,汽车处于线性状态,基于阿克曼模型的电子差速控制策略和基于直接横摆力偶矩的电子差速控制策略对于车辆的控制效果几乎相同,均可以起到差速控制的效果,并且都有良好的表现。
3.2 中速中角度转向行驶
第二种工况是中速中角度转向行驶工况,汽车以60 km/h的初速度行驶,踏板施加100 N·m的驱动转矩,行驶在附着系数为0.85的路面上,3 s时刻时,一秒内给方向盘施加100°的转角,观察两个控制器的控制效果。

图30 中速中弯车速图Fig.30 Speed chart of middle speed and middle curve
从车速图可以得知,中速行驶时两种差速控制给汽车车速的影响已经有一定的不同,尽管车速的趋势大致相同,但是基于横摆力偶矩的车速相较于基于阿克曼模型的车速要高一点。
同时,两者对于质心侧偏角的影响更大。从图中很明显可以看出,基于横摆力偶矩控制的车辆质心侧偏角要比基于阿克曼模型的车辆的质心侧偏角小。意味着基于直接横摆力矩的电子差速系统对于质心侧偏角的控制更加好。

图31 中速中弯质心侧偏角图Fig.31 Sideslip angle diagram of center of mass at middle speed and middle bend
从滑移率的图中可以看出,基于直接横摆力矩控制的车辆,其左右两驱动轮的滑移率相较于基于阿克曼模型控制器的车辆更加接近,这使得两车轮的相对滑移率较小,对于汽车轮胎的磨损和车辆转向时的附着利用都是有利的。

图32 中速中弯车轮滑移率图Fig.32 Wheel slip rate of medium speed and medium curve vehicle
由于两控制器的控制效果不同,所以两辆车的运行轨迹也有很大的差别。如下图所示。
综上所述,对于中速中弯工况而言,基于直接横摆力矩的控制效果相较于基于阿克曼模型的电子差速控制而言具有较大的优势。

图33 中速中弯行车轨迹图Fig.33 Track diagram of medium speed and middle curve
3.3 高速小角度转向行驶
第三种工况是高速小角度转向行驶,汽车以100 km/h的初速度行驶,踏板施加100 N·m的驱动转矩,行驶在附着系数为0.85的路面上,3 s时刻时,一秒内给方向盘施加60°的转角,观察两个控制器的控制效果。
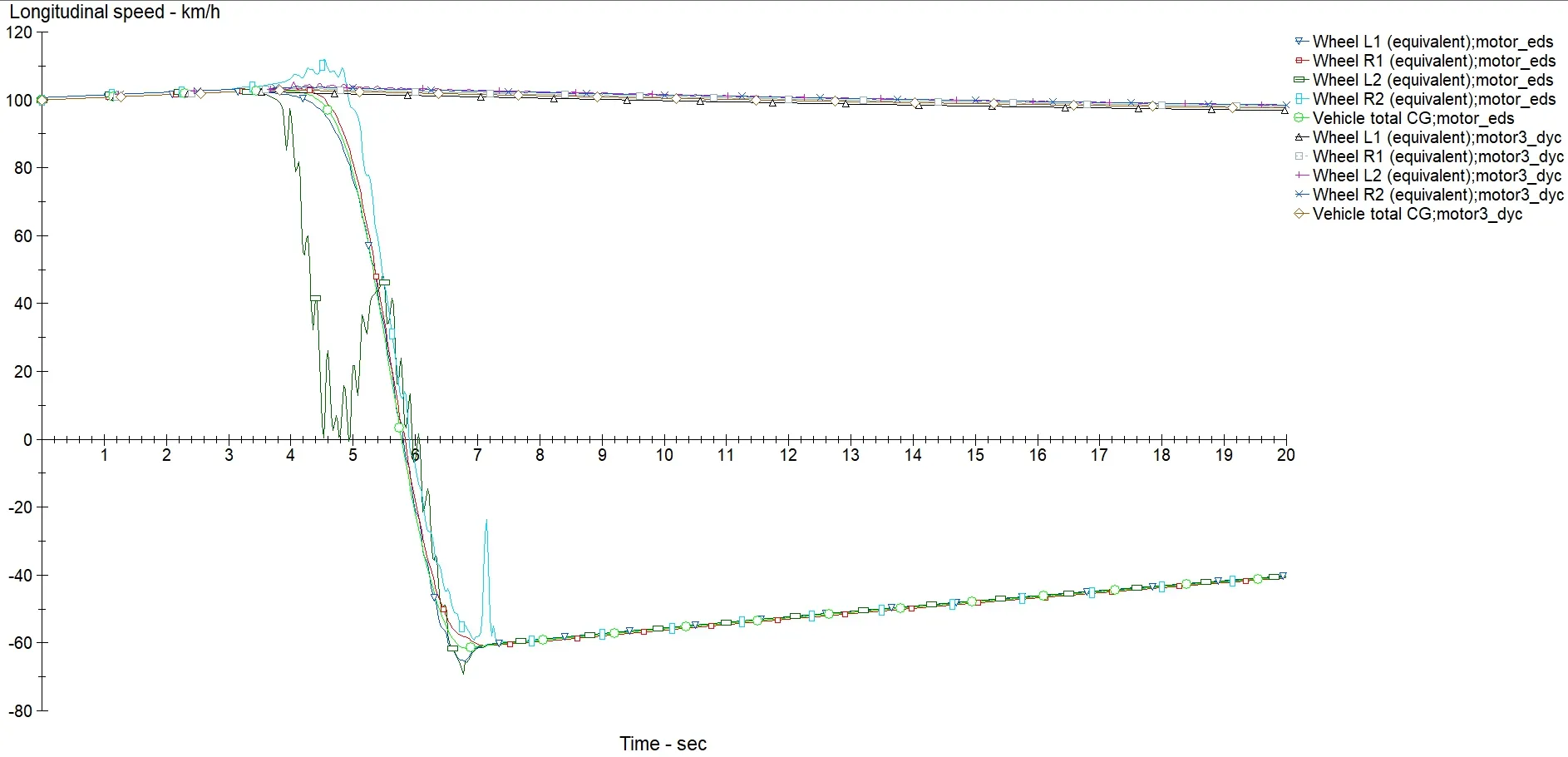
图34 高速小弯车速图Fig.34 Speed chart of high speed small curve
从车速图中可以很明显看出,在高速情况下,基于阿克曼模型的电子差速控制已经失效,甚至产生了副作用,车辆的车速已经变得不稳定。而基于直接横摆力矩控制的差速器依旧能使汽车保持正常行驶。
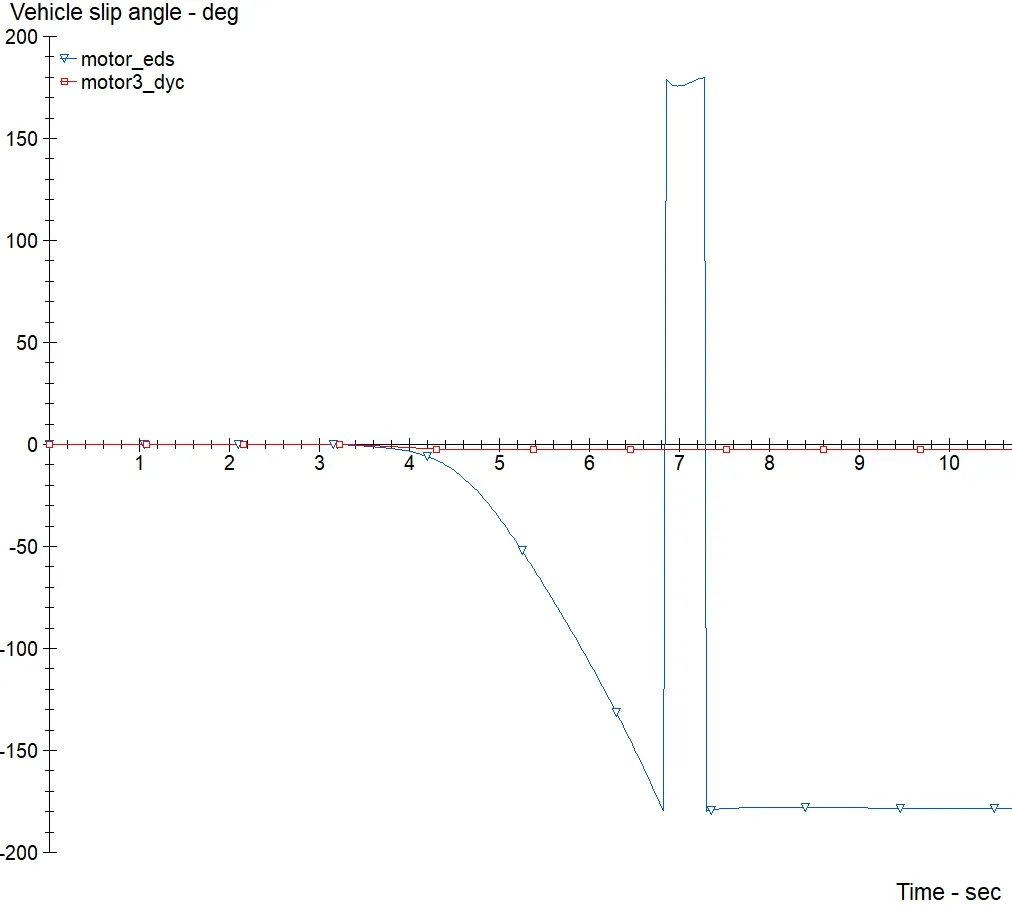
图35 高速小弯质心侧偏角图Fig.35 Sideslip angle diagram of high speed small bend centroid
在质心侧偏角的观测上,阿克曼模型的质心侧偏角已经远远大于直接横摆力矩控制的车辆,出现了失稳的状态。从图中可以看出基于DYC控制的车辆的质心侧偏角依旧保持在一个较小的值,使汽车平稳转向。
从行车轨迹图上可以明显看出,两条轨迹完全不同,基于横摆力矩控制的车辆依旧按驾驶员的意图进行转向,而基于阿克曼模型的车辆已经失稳,不再遵循驾驶员方向盘的操纵意图了,这对于驾驶而言十分危险。

图36 高速小弯行车轨迹图Fig.36 Track diagram of high speed small curve
从图37中可以看出,基于横摆力矩控制的车辆其横摆角速度依旧保持10 deg/s内,处在安全阈值中,而基于阿克曼模型的车辆最高横摆角速度已经达到80 deg/s,约等于1.40 rad/s,而车辆失稳时的横摆角速度阈值为0.3。可知高速时基于阿克曼模型的车辆γ值已经大于失稳时的阈值,所以汽车失去稳定性。而基于横摆力矩控制的车辆依旧可以平稳转向行驶。

图37 高速小弯横摆角速度图Fig.37 Yaw rate diagram of high speed small bend
从滑移率图中可以观察,在失稳的状态下,基于阿克曼模型的车辆车轮早已打滑,而基于横摆力矩控制的车辆依旧保持在较好的状态,充分利用地面的附着力。
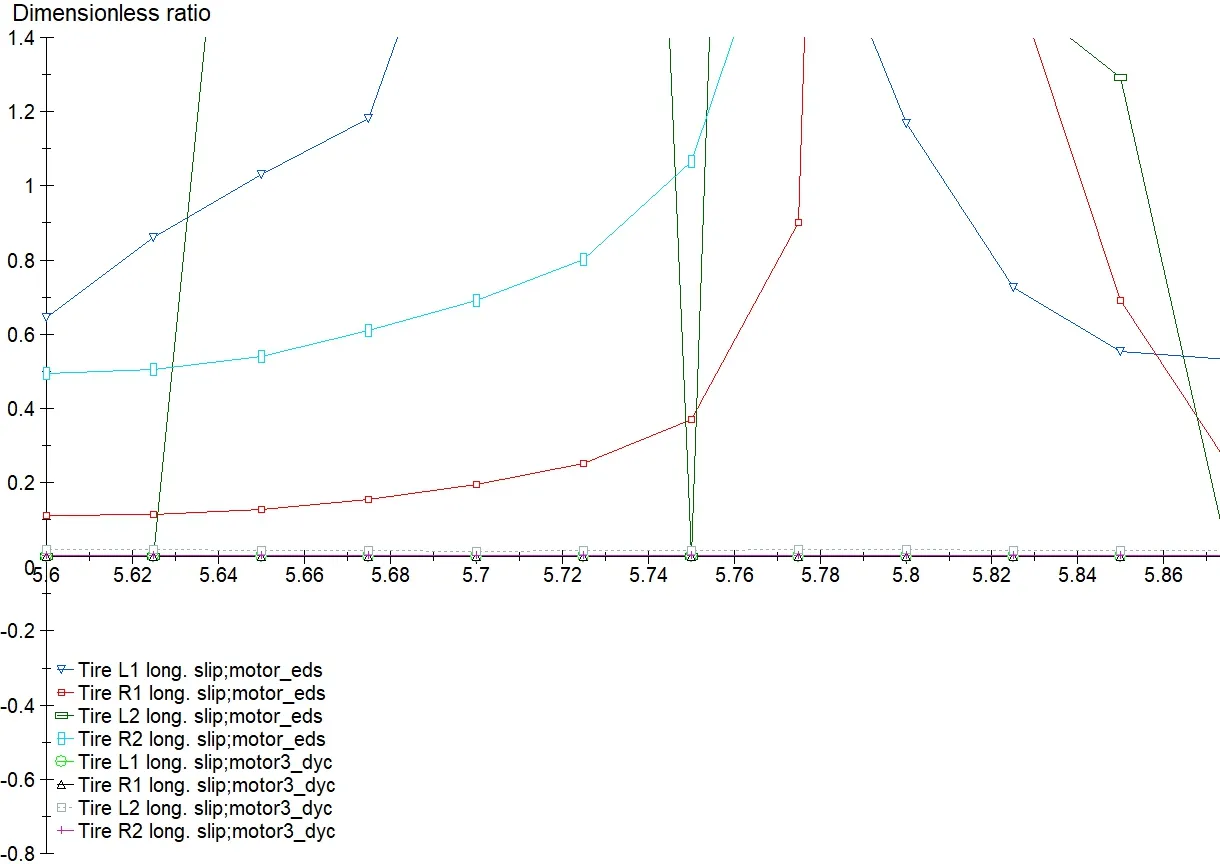
图38 高速小弯车轮滑移率图Fig.38 Slip ratio diagram of high speed small curve wheel
3.4 正弦波输入工况
第四种工况是以正弦波为输入信号,转向行驶汽车以50 km/h的初速度行驶,踏板施加100 N·m的驱动转矩,行驶在附着系数为0.85的路面上,随着时间给方向盘施加90°的正弦转角,汽车也在地面上进行移线工况行驶。观察两个控制器的控制效果。
从车速图可以看出两种控制器在车速上的控制差不多,都可以按驾驶员意图让汽车按一定车速行驶。从图中可以看出,可知基于直接横摆力矩控制的电子差速控制策略要比基于阿克曼模型的电子差速控制策略要好一些。

图39 方向盘正弦信号输入图Fig.39 Sinusoidal signal input diagram of steering wheel

图40 移线工况车速图Fig.40 Speed chart under lane changing conditions
对于质心侧偏角的对比就较为明显。从图41中可以得出,在两种控制器的控制效果下,汽车的侧偏角有明显差异。基于横摆力矩控制的车辆要明显比基于阿克曼模型的电子差速控制车辆要小,说明基于直接横摆力矩控制的汽车更能按驾驶员意图进行转向行驶,并且比基于阿克曼模型的车辆更接近理想行车轨迹。

图41 移线工况质心侧偏角图Fig.41 Sideslip angle diagram of mass center under line shifting condition

图42 移线工况行车轨迹图Fig.42 Train track diagram under lane changing conditions
4 结论
在同一个车辆模型下,分别施加两种控制器,观察其控制效果。本文一共进行了四种工况的测试,分别是低速大弯、中速中弯、高速小弯以及正弦移线试验,从上面的仿真结果中可以看出。在低速情况下时,汽车处于线性状态,基于阿克曼模型的电子差速控制策略和基于直接横摆力偶矩的电子差速控制策略对于车辆的控制效果几乎相同,均可以起到差速控制的效果,并且都有良好的表现。对于中速中弯工况而言,基于阿克曼模型的电子差速控制效果虽然还可以进行控制,但是已经不尽如人意,此时基于直接横摆力矩(DYC)的控制效果相较于前者而言就有很大的优势。高速时基于阿克曼模型的车辆值已经超过失稳时的阈值,所以汽车失去稳定性。而基于横摆力矩控制的车辆依旧可以平稳转向行驶。在正弦移线工况下,基于横摆力矩控制的车辆要明显比基于阿克曼模型的电子差速控制车辆要小,说明基于直接横摆力矩(DYC)控制的汽车更能按驾驶员意图进行转向行驶,并且比基于阿克曼模型的车辆更接近理想行车轨迹。
通过四种工况仿真结果的对比可以得出,在低速情况下,两种控制器的控制效果接近,均可以提供很良好的差速效果,而随着车速的上升,汽车部分动力学参数变成非线性化,所以基于阿克曼模型控制的电子差速控制器便慢慢变得不稳定,车身开始出现不稳定的情况。此时基于直接横摆力矩(DYC)控制的汽车依旧具有良好的转向差速性能。所以通过对比发现,基于阿克曼模型的电子差速器只适用于低速情况下,而高速情况下采用直接横摆力矩(DYC)控制效果更好。
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
铁道建筑(2010年11期)2010-07-30
空间控制技术与应用(2009年2期)2009-12-20
小品文选刊(2009年19期)2009-11-26
