基于水幕的舰船红外干扰策略研究
2021-06-08 09:27赵建辉
应用光学 2021年3期
付 健,赵建辉,李 帆,张 馗
(1.北京航空航天大学 仪器科学与光电工程学院,北京 100191;2.中国船舶工业系统工程研究院,北京 100036;3.东南大学 仪器科学与工程学院,江苏 南京 210096)
引言
红外成像反舰导弹以其攻击隐蔽性好、精确度高、抗电子干扰能力强等特点,逐渐成为现代反舰导弹的主流,如康斯贝格防务航空航天公司的NSM(naval strike missile)系列红外成像反舰导弹和洛克希德·马丁公司的LRASM(long range anti-ship missile)隐身红外成像反舰导弹[1]。这些新型红外成像反舰导弹的导引头采用了线列或面阵式成像探测器,并利用弹载计算机对获取的红外图像进行处理,由于其目标识别算法基于整个舰体的红外图像,故具有更高的灵敏度和空间分辨能力,抗干扰性也大幅提升。传统的舰载红外干扰方式如热焰弹、烟雾等已逐渐不能满足要求[2],因此,亟需研究新型的对抗方法。近年来利用水幕对舰体降温,从而降低其红外特征成为热门研究方向[3-4]。
20世纪90年代末,J.Thompson 和David A.Vaitekunas提出了使用水幕对舰船降温从而减弱其红外辐射强度的方法,并以海湾战争中美舰船利用防化洗消系统对舰船降温,从而躲避伊拉克反舰导弹攻击的事例作为应用实例[5]。2010年,David A.Vaitekunas等人利用加拿大的“探索号”海军辅助船只进行了红外水幕降温试验,并最终给出船体主动降温策略可使目标舰船的平均发现距离降低20%~80%的结论[6]。2013年他们又利用现有的气象数据对北约舰船红外特征仿真标准软件(The naval ship infrared signature model and naval threat countermeasure simulator,ShipIR/NTCS)的 环境模型进行了完善[7]。2018年David A.Vaitekunas和 Pavel Alexsandrov对水幕降温的实际效果做了仿真研究,他们使用流动的薄水膜模拟施加的水幕,利用ShipIR/NTCS软件进行仿真效果分析[8]。该研究同时也利用了加拿大海军的辅助船只进行了实际场景下的水幕降温试验。
综上所述,国外在水幕对舰船红外特征影响方面的研究开展较早,但对分区水幕的施加方式与红外成像导引头识别成功率之间的关系研究较少,而国内在舰船隐身方面的研究多集中在水雾隐身方面,且未见涉及到分区概念。针对以上问题,本文利用舰船红外辐射仿真模型对舰船水幕施加策略与红外成像导引头识别成功率之间的关系进行了研究,并结合典型目标边沿检测算法和模板匹配算法的原理,设计了若干种对抗红外成像反舰导弹的水幕施加策略,通过仿真试验测试它们对红外成像导引头的干扰效果并加以改进,最后通过降温试验验证了水幕降温的可行性。
1 舰船红外辐射仿真图像获取
1.1 红外辐射波段的选择
红外成像反舰导弹通常选取透射率较好的大气窗口作为其响应波段,而舰船的甲板和侧舷等表面部位的红外辐射波长主要集中在长波红外波段(8 μm~12 μm)[9-10],故本文主要研究水幕对舰体表面长波红外波段红外辐射的影响,下面所列红外仿真图像均为长波红外波段图像。
1.2 仿真模型的搭建
基于csv格式点集和面元数据,利用Matlab构建obj格式的船体三维网格模型,导入热仿真软件Radtherm中,给舰体表面添加材质纹理,布置海面和天空模型,并设置各种仿真参数如表1所示。
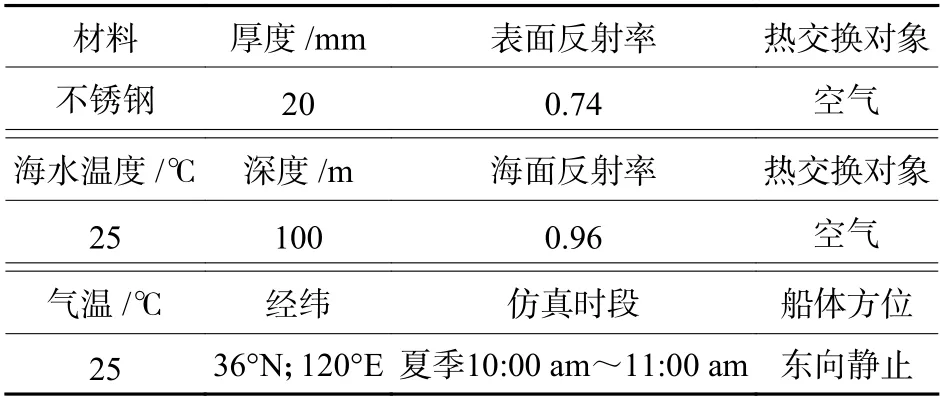
表1 仿真参数设置Table 1 Simulation parameters setting
运行Radtherm,生成包含天空、海面和舰船目标的综合红外模型,其中海面与天空交角为90°,舰船目标被放置在海天线附近,截取包含来袭导弹视角信息的图像,考虑到由海水反射的太阳辐射可能会进入导引头的红外视场内,且海面的闪耀斑对目标跟踪存在一定的干扰[11],为了使仿真环境更加逼近真实场景,本文将仿真图像中的海面与实拍海面红外图像进行融合,获得海面海浪纹理,结果如图1所示[16],图像大小为640 ×640 pixel。

图1 添加海浪纹理后包含海天背景的舰船仿真图像Fig.1 Simulation image of ships after adding wave texture
2 水幕施加策略分析与设计
本文采用性能较好的Canny边缘检测算法和基于归一化积相关(normalizated product correlation,NPROD)的模板匹配算法,模拟红外成像导弹的导引头对仿真红外图像序列中舰船目标进行识别。
2.1 采用Canny边缘检测算法提取目标轮廓
采用双阈值边缘检测算法对舰船目标的红外边沿进行提取[12],采用Roberts算子计算图像中各点的梯度值。
图像中各点处的梯度大小及方向角计算方法如下式所示:
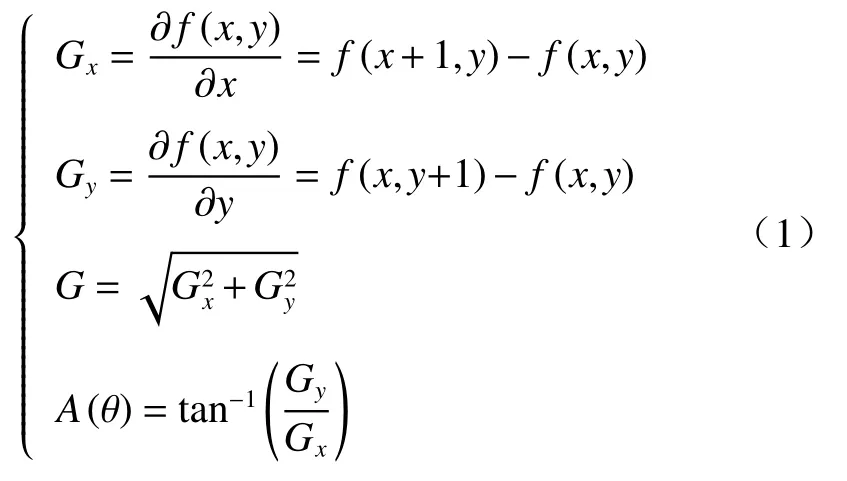
式中:x、y分别表示图像中待计算点的横纵坐标;Gx和Gy分别表示沿水平和竖直方向的一阶导数;G表示图像梯度的大小;A(θ)为梯度的方向角。
在获取目标的梯度大小和方向之后,对图像进行全局检测,考察每一个像素点的梯度,仅保留在邻域内具有相同梯度方向的像素点中梯度值最大者,去除掉非边界上的点。结合实际情况选取一个较小阈值Tmin和一个较大阈值Tmax,当像素点的灰度值高于Tmax时认为是真正的边界点,当像素点的灰度值低于Tmin时认为不是边界点。对于介于两者之间的像素点,则考察是否与已确定的边界点相连,如果相连,则认为是边界点,否则认为不是边界点。综上所述,一个点P是边界点需要满足以下2个条件之一:
1)P点的梯度值大于Tmax;
2)P点的梯度值大于Tmin且小于Tmax,并与边界点相连。
2.2 基于NPORD模板匹配算法的目标识别方法
NPORD模板匹配算法是一种通过计算模板与目标图像之间的相似度来进行匹配的目标识别算法,具有计算过程不受图像本身灰度比例影响且匹配精度高等优点。其过程为:首先利用获取的舰船仿真图像制作掩膜,再对掩膜边沿进行提取得到模板图像;之后将模板图像在目标图像上滑动,每次移动一个像素点,计算模板图像与其所覆盖的目标图像子区域的相似度,以此作为此处的匹配数据,待所有位置的匹配数据都计算完毕后,再通过对匹配数据的筛选得到最终的匹配区域。
在搜寻过程中,设模板图像为T,尺寸为w×h,待搜索图像为I,尺寸为M×N,模板所覆盖的目标图像子区域左上角像素点P坐标为(i,j)。显然i和j的取值范围为

为计算模板与模板所覆盖的目标图像子区域之间的相似度,设S(i,j)为原图像中P点处的相似度,选择如下偏差计算法:

将上式展开得到:

选择第2项作为匹配度,于是得到P点的匹配度R的计算公式为

归一化后,有:

(6)式中R(i,j)的结果越接近1,则在目标图像中以P点为左上角、大小为w×h的区域是目标区域的可能性就越大,当目标与模板完全匹配时,R(i,j)为1。
2.3 水幕施加策略设计
考虑到大多数反舰导弹在接近目标的过程中将保持视角水平,且临近目标时飞行高度在海平面以上10 m左右[13],并将从舰体的侧面来袭,因此舰体的侧面部位将成为布置水幕的重点区域。为覆盖来袭导弹视场内的船体,结合实际情况,在舰船的外表面设置4个施加水幕的分区和4个特定的边沿,其位置如图2所示。
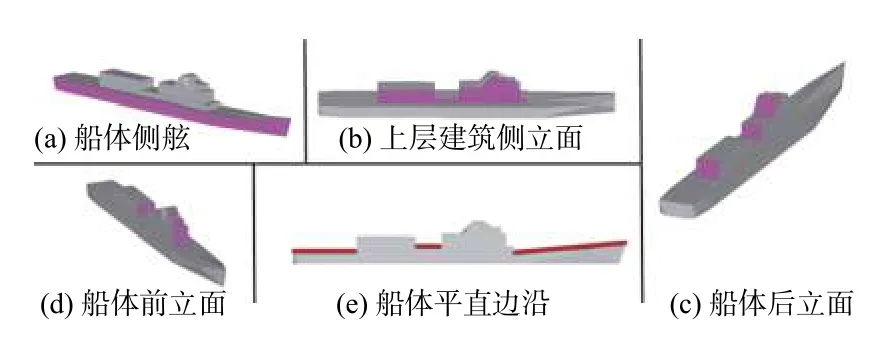
图2 船体表面分区Fig.2 Hull surface partition
分区位置描述如表2所示。

表2 分区设置Table 2 Partition settings
根据已有文献介绍的红外成像导引头识别算法的特点以及红外成像导引头识别算法发展的趋势[14-15],本节分区水幕策略的设计主要是从破坏舰船轮廓和降低红外图像中舰船与海天背景的对比度的角度来考虑的。另外,若只用水幕遮蔽边沿,显然不能对船身起到较好的遮蔽降温效果,因此将按照表2相应分区施加水幕,以降低船体对应分区的温度。
本文设计了7种水幕施加策略及对照组描述,如表3所示,这些策略将根据实际仿真匹配效果进行后期优化。表3中序号7的交叉水幕是指在边沿部位施加横向和纵向交叉在一起的水幕,从而将舰船对应边沿遮盖。

表3 7种水幕施加策略Table 3 Seven water curtain application strategies
3 仿真分析及水幕降温效果验证
3.1 仿真过程及目标距离分析
仿真分析流程如图3所示。
图3 仿真流程图Fig.3 Flow chart of simulation
仿真环境为CPU:AMD9350e,主频2.00 GHz,内存4 GB;操作系统:Windows 7;仿真软件:Radtherm;目标提取与识别:Opencv算法库;编译环境:PyCharm。
首先在舰船模型对应的水幕施加位置添加水幕纹理,其中水幕模型采用均匀的薄水膜来进行模拟,厚度设置为1 cm,薄水膜的一面与舰体表面接触并进行热交换,另一面则暴露在太阳辐射下并与空气进行热交换,水幕温度取海水温度25 ℃。设置好各项仿真参数之后运行Radtherm,待船体温度稳定后得到舰船模型的红外仿真结果。选取仿真模型的红外长波图像作为下一步分析的基础,选取方式为:维持俯仰角为0°,观察高度为海拔10 m,保持平视舰体侧面的视角,设置导弹来袭方向与舰船的侧舷夹角α从64°逐渐变化至115°,每变化1°选取一张图像,如图4所示。每种策略选取51张仿真图像。
图4 导弹来袭方向与侧舷夹角αFig.4 Attack direction and sideboard angle α of missile
截取从海天线开始到视场下沿的海面实拍红外图像,将仿真图像中的海面部分与海面实拍图像的海面部分融合,使舰船仿真模型的位置位于海天线附近,得到包含海浪噪声的红外仿真图像,如图5所示。图5(a)为α=90°时施加水幕后的红外仿真图像,图5(b)为包含海浪噪声的边沿图像。
图5 舰船侧舷施加水幕后在α=90°时提取的仿真图像及其边沿图像Fig.5 Simulation image and its edge image of ship after applying water curtain when α is 90°
接着确定仿真舰船模型与红外成像导引头视点之间的距离。受地球曲率的影响会产生海天线,近地表的观察者无法看到海平面上超过一定距离的物体。海天线与观察者之间的距离受观察者所在高度影响,由几何关系可得下式[16]:

式中:R为地球半径;h为观察者相对于海平面的高度;L为观察者到海天线的距离。
反舰导弹的飞行高度通常为10 m左右,地球半径为6 371 km,由此计算出海天线距导引头约10 km。由何恒提出的像素估算法[16],根据舰船的比例和像素数,进一步精确估计结果,得到仿真图像中导引头所在位置与舰船的距离约为6.36 km。
3.2 仿真结果分析及优化
利用边沿检测算法和模板匹配算法对施加水幕之后提取的红外仿真图像进行处理,算法匹配到目标则视为识别成功,否则视为识别失败,识别成功率越低,则认为策略的隐身效果越好。对于每种水幕施加策略,取其51张仿真图像计算导引头识别成功率,计算方法如下:

式中:K为导引头识别成功概率;N为每种策略下总的仿真识别次数;M为每种策略下识别错误的次数。
部分识别结果如图6所示。图6中目标的三维相似度结果如图7所示。图7中相似度最高点即为匹配结果,而天空背景区域因与模板的相似度较小且干扰不多,故表观较为低矮平坦。
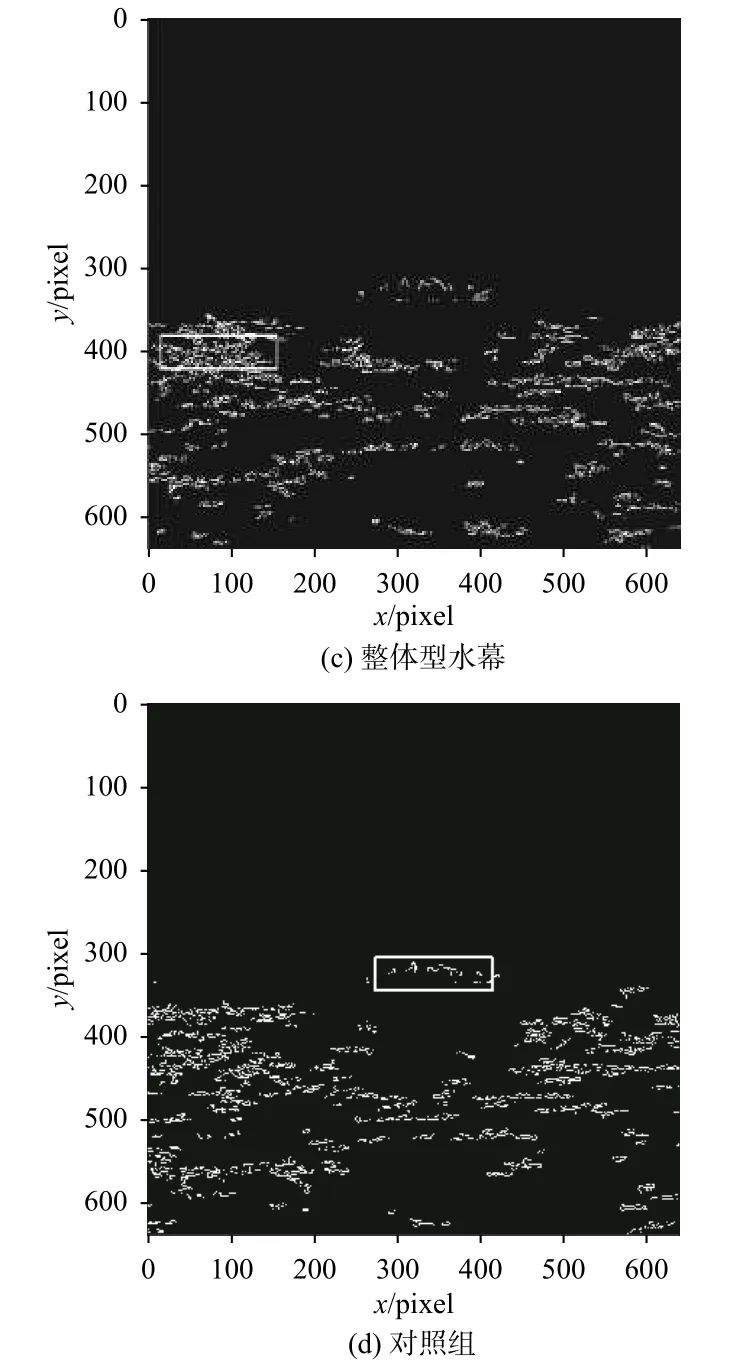
图6 施加水幕后α=74°时部分目标匹配结果Fig.6 Part of targets matching results after applying water curtain when α is 74°
最终得到的目标总的识别结果,如表4所示。

表4 识别结果Table 4 Recognition results
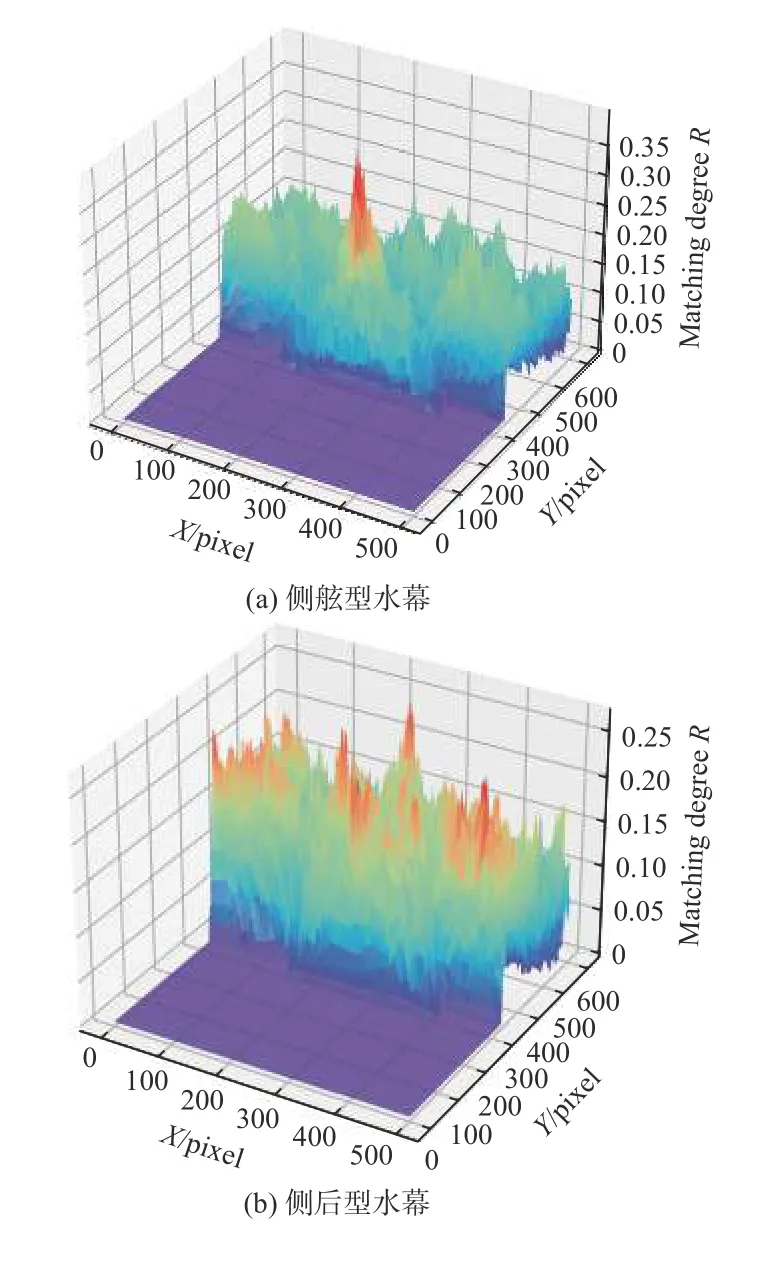
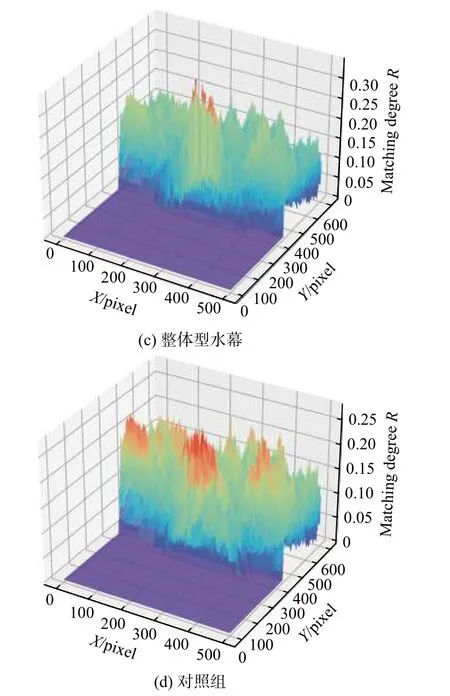
图7 部分测试图(α=74°)对应的三维相似度结果Fig.7 3D similarity results corresponding to partial test graphs when α is 74°
由表4数据可看出,在总识别率方面,对舰体侧舷和前后立面施加水幕的几种方式所得到的识别成功率大致相同,相较于对照组的识别成功率降幅在5%以内,这说明如果仅对舰船目标的面分区进行水幕覆盖,那么对基于目标边沿的模板匹配算法的识别成功率并不会有明显的影响。相对于其他舰体面分区水幕覆盖来说,针对边沿进行覆盖的整体加边沿型水幕对于识别成功率的影响则较为显著,其识别成功率较其他水幕策略下降了约一半。为此在整体加边沿水幕的基础上优化出斑马纹型水幕,斑马纹型水幕较整体加边沿水幕的主要区别是,不再对船体表面施加整体水幕,而是只在图2(e)所示4个边沿部位施加交叉水幕,其施加方式如图8(a)所示。图8(a)中圆点为水幕喷头布置位置,箭头指示出喷头的水幕施加方向。在此种水幕施加方式下,舰体在导引头视场中的红外轮廓被分割成几个部分,其对舰体轮廓的打断效果如图8(b)所示。由图8(b)中箭头所示位置可看出此种策略较好地破坏了舰体边沿的整体性,从而进一步降低了识别成功率。在仿真试验中,选取的51张仿真图像之中仅有4张识别成功,总的识别成功率为7.8%。

图8 斑马纹型水幕的施加方式和效果示意图Fig.8 Application mode and effect diagram of zebra-stripetype water curtain
为了进一步证明斑马纹型水幕的优化效果,除斑马纹型水幕之外,再选取隐身效果较好的整体加边沿型水幕以及对照组,以模板与目标重合时模板的左上角像素点为中心,将大小为31 pixel×31 pixel的矩形设为感兴趣区域(region of interest,ROI),分别计算目标在ROI中的相似度比例系数,计算公式如下:

式中:Rratio为 相似度比例系数;Rtar为目标的相似度;Ravg为ROI内相似度比例系数平均值。计算结果如图9所示。

图9 两种策略以及对照组的相似度比例系数Fig.9 Two strategies and similarity proportional coefficient of control group
由图9可以看出,相对于整体加边沿型水幕,经斑马纹型水幕处理的目标在大多数仿真图像中的相似度比例系数都得到了进一步的降低,这就是其识别概率进一步下降的原因。同时分别计算出两种策略及对照组的51张仿真图像的相似度比例系数平均值,计算结果如表5所示。

表5 两种策略以及对照组的相似度比例系数平均值Table 5 Two strategies and average value of similarity proportional coefficient of control group
由表5可以看出,斑马纹型水幕在整体加边沿水幕的优化效果进一步降低了目标的相似度,增加了识别算法的匹配难度,从而加强了舰体的隐身效果。
3.3 水幕降温效果验证试验
为验证仿真中水幕降温效果的真实性,本文也进行了真实场景下的水幕降温效果验证试验。试验板为钢材质,表面覆有防锈漆,温度测量装置安装在试验板的后表面,由热电偶组成,某型喷头布置于试验板右上角。采用某型红外热像仪来记录试验板表面的红外辐射强度在施加水幕后随时间的变化情况,热像仪记录的红外波长为8 μm~12 μm。试验中喷头喷出的水幕平行喷洒于试验板上,施加水幕的持续压力为5.0 bar,流量为61.3 L·min−1,在水温为27 ℃、气温为32 ℃的情况下持续施加水幕150 s,使试验板温度达到稳态。试验板上水幕施加区域的平均长波红外辐射温度从43 ℃下降到了28 ℃,降温速率约为6.0 ℃·min−1,如图10所示。在仿真中,水幕施加区域的平均长波红外辐射温度在约200 s内从48 ℃降温至约27 ℃,降温速率约为6.3 ℃·min−1。本试验证明,水幕能在较短时间(约150 s)内使目标区域取得较大程度的温度降幅(约15 ℃),考虑到现实条件与仿真环境之间的差别,可以认为本试验验证了仿真试验中水幕降温效果的有效性。

图10 水幕试验情况Fig.10 Water curtain test situation
4 结论
本文提出了若干种基于分区水幕控制的针对红外成像反舰导弹的舰船隐身策略,建立了包含海天背景的综合船体红外辐射仿真模型,利用Canny边缘检测算法和NPORD模板匹配算法对施加了水幕的目标模型进行了仿真研究,给出了优化后的斑马纹型分区水幕控制策略。该策略将舰体的轮廓分割成小块,从而使其轮廓特征被破坏,被破坏后的目标轮廓与模板之间的相似度降低,使目标舰船隐藏在海浪的噪声里。斑马纹型水幕可使红外成像导引头在中等距离(约6.36 km)上对目标识别的成功率较不施加水幕下降了约60%。实际场景下的水幕降温试验也验证了仿真试验中水幕降温效果的真实性,这在侧面为仿真结论提供了支撑。研究结果表明,水幕可以干扰红外成像反舰导弹导引头对目标的识别,本文提出的对抗策略值得在理论和实践方面展开更加深入的研究。
猜你喜欢
娃娃乐园·综合智能(2021年10期)2021-12-06
南京工业大学学报(自然科学版)(2021年2期)2021-04-14
小学生学习指导(小军迷联盟)(2019年11期)2019-11-16
小学生学习指导·小军迷联盟(2019年11期)2019-09-10
当代陕西(2019年15期)2019-09-02
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
中学科技(2015年10期)2016-01-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11