
无人机在航道管理中的快速判定应用分析
2021-06-15 18:25林迪
西部交通科技 2021年3期
林迪


作者简介:
林 迪(1984—),工程师,主要从事航道管理、无人机航测方面工作。
文章通过实践分析,研究了消费级无人机在航道管理中的快速判定应用,总结出直线法和三角法两种可应对多种情形的测算方法,可用于违建码头规模预估、界定采砂船舶是否违法进入航道施工,以及测算施工船舶的作业位置、水上助航标志配布位置间隔距离等方面工作。
航道管理;消费级无人机;直线法;三角法;快速判定
U612A572054
0 引言
无人机的应用日益广泛,工业级无人机在行业细分领域中朝着专业化应用、定制级解决方案的方向发展,但受价格成本制约,在预算不足的单位难以推广使用。普通的消费级无人机因性价比高和便携性等优点,目前在航道管理中基本已普及使用,不过其作用仅限于航拍取证方面[1-2]。经过实践测算分析,在使用无人机完成航拍取证之后,可进一步利用操作系统中的“无人机与返航点距离”功能,对违法行为进行快速判定,测算违建码头占用岸线长度等相关数据、界定采砂船舶是否进入航道范围内,作为对违法行为后续处理的依据;也可以用于测算施工船舶的作业位置,判断其是否在规定的施工区域内;以及测算水上助航标志配布位置间隔距离,判断是否符合助航标志配布方案的要求[3]。
1 无人机简介
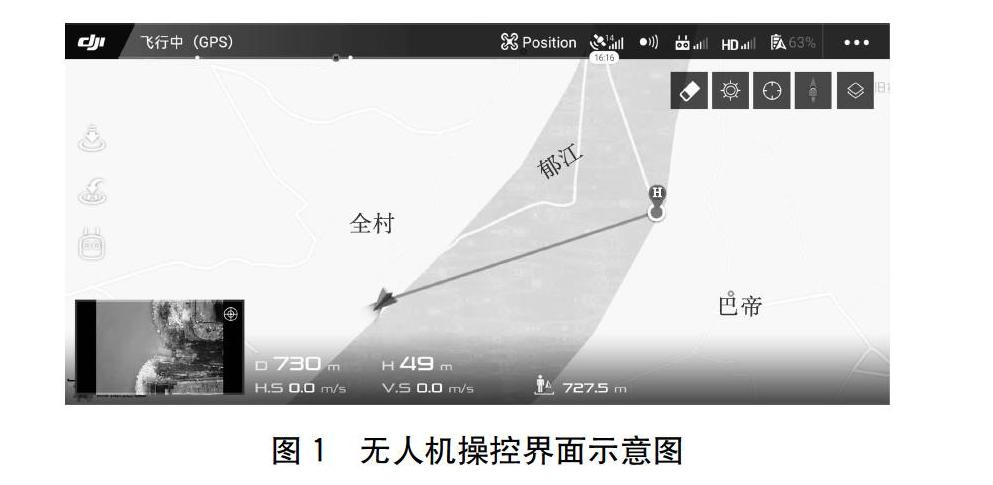
采用大疆御pro铂金版机型,操控界面如图1所示。
图1中,箭头符号表示无人机;箭尖为机头航向;为返航点。
2 测量方法
根据到达现场所使用的交通工具、需测量的对象以及現场周边环境情况,可使用直线法和三角法两种方法。
2.1 直线法
直线法适用于测算使用船舶或车辆可直接抵达的码头、桥梁,以及能够靠泊的采砂船,且测量对象周边有适于无人机起降的场地。
2.1.1 测算码头占用岸线长度
巡航发现某段岸线上正在进行土地平整和岸坡堆填,疑似在建码头,工作船靠泊后使用无人机测算其占用岸线长度,测算方法及步骤如下(图2):
(1)从返航点起飞,调整航向与码头岸线平行,飞到码头岸线起点A上空附近,通过遥控器云台俯仰拨轮调整俯仰角度至-90°,进入俯拍模式,再微调无人机位置使该点处于相机拍照框的中心,此时无人机即处于码头岸线起点A的正上方,记录下点与该点距离数据(444 m)。
(2)调整航向角,使码头起点、终点以及点的航线连线平行于岸线,飞抵码头终点C的正上方,记录下点与该点距离数据(67 m)。
(3)因点处于码头岸线起点与终点之间,上述两数值之和即为码头岸线长度(511 m)。
2.1.2 界定采砂船位置
巡航发现某采砂船在航道附近作业,该航段河面较宽,周围没有可供参考的示位标,此时可用直线法掌握该采砂船的准确位置,见图2。
(1)无人机在采砂船起飞,返航点在采砂船上,调整航向角,使点与右侧岸线A点的航线连线垂直于岸线,然后飞抵该点的正上方,记录下点与A点的距离数据(502 m)。
(2)调整航向角,使无人机飞越采砂船位置点后继续前进至左岸线C点正上方,飞行过程中必须保持航向角不变,保证三个点处于同一直线上,记录下点与C点的距离数据(284 m)。
(3)比对航道图得知,该采砂船所处位置的航道左边线与洪水期左岸线的距离为300 m,与右岸线的距离为480 m。结合无人机测量数据可知,该采砂船与航道左侧边线距离过近,对航道保护范围和通航安全造成了影响,因此对其进行警告并要求撤离。
2.1.3 界定施工船舶位置
某疏浚工程需要在丁坝的坝田内进行清淤作业,要求施工船舶不能超出丁坝区域施工,但因洪水期水位上涨淹没丁坝,执法人员在进行施工监管时难以判定施工船舶的作业位置是否超出范围。由于沿线丁坝均有沿江公路连接,丁坝坝头到公路的直线距离可在卫星图上测量得出,此时可使用直线法来测算确定施工船舶的位置。测算方法及步骤如下:
(1)沿公路找到施工船舶所在点与公路连线的一点,该点与施工船舶的连线与最近的丁坝平行,以此点作为返航点,起飞后飞抵施工船舶的正上方,记录点与该点的距离数据,如图3所示。
(2)结合现场航拍照片,比对该施工船舶与所在坝田的最近的一条丁坝坝头到公路的直线距离,测算施工船舶是否超出范围作业。对该疏浚工程某天的施工监管情况见图4。由图4可知,施工船舶A、C、D在坝田范围内作业,施工船舶B、E则超出了坝田范围,因此对其进行警告并要求撤回指定的施工区域。
2.1.4 水上助航标志布设位置
某桥梁需要抛设桥区助航标志,在桥址上下游约200 m处各设置一对发光水面侧面浮标,此时可使用直线法测算助航标志抛设位置是否符合要求。测算方法为沿桥面找到与水面侧面浮标所在点的最短距离点,即浮标所在点到桥面垂线的交点,以此点作为返航点,起飞后飞抵浮标的正上方,记录点与浮标所在点的距离数据(170 m)。测量情况见图5。经对比可知该浮标布设位置不符合要求,需进行调整。
2.2 三角法
若测量对象现场不适合无人机起降,或是不适合用直线法测量的情况,可使用三角法测量。
2.2.1 测算码头占用岸线长度
某段岸线上正在进行土地平整和岸坡堆填,疑似在建码头,由于交通不便,第一次测算时的无人机返航点选在对岸,测算方法及步骤如下(图6):
(1)从返航点点起飞,调整航向正对码头一端点A,飞到该点正上方,记录下点与该点距离数据(397 m)。
(2)调整航向角指向码头另一端点C,因点到码头岸线AC垂线的垂足位于AC上,注意保持航线与码头岸线AC平行,在飞行过程中找出点与码头岸线AC最短距离交点B。为减少误差,测量时需使用有直角的物品(如A4文件纸),贴近操控屏幕上的航线AC以及连线HB进行校正,保证∠HBA为直角,找到垂足B点后记录下点与该点的距离数据(360 m)。
(3)保持航向角不变,保证A、B、C三个点处于同一直线上,飞抵远端岸线C点的正上方,记录下点与另一端岸线C点的距离数据(423 m)。
(4)综合上述数据(如图6所示),根据勾股定理可知AB=167 m、BC=222 m,计算得出该码头占用岸线长度AC=389 m。
2.2.2 界定采砂船位置
在岸上发现某采砂船在航道附近停泊,可用三角法测算其到左岸及右岸的距离,掌握该采砂船的准确位置,测算方法及步骤如下(图7):
(1)从返航点点起飞,调整航向正对采砂船,然后飞到采砂船正上方,记录下点与采砂船位置A点的距离数据(781 m)。
(2)调整航向角,使采砂船位置A点与远端岸线C点的航线连线垂直于岸线,然后飞抵远端岸线C点的正上方,记录下点与远端岸线C点的距离数据(972 m)。
(3)调整航向角,使无人机飞越采砂船位置A点后继续前进至近端岸线D点正上方,记录下点与近端岸线D点的距离数据(522 m)。
(4)由于点到左右岸两端连线CD垂线的垂足位于CD延长线上,因此需保持航向角继续前进,找出点与CD延长线最短距离交点B。为减少误差,测量时需使用有直角的物品(如A4文件纸),贴近操控屏幕上的航线CD以及连线HB进行校正,保证∠B为直角,找到垂足B点后记录下点与岸线AC该点的距离数据(422 m)。步骤3和4的飞行过程中必须保持航向角不变,保证四个点处于同一直线上。
(5)综合上述数据(如图7所示),根据勾股定理计算出该采砂船到左岸线的距离为AC=216 m,到右岸线距离为AD=351 m。
(6)比对航道图得知,该采砂船所处位置的航道左边线与左岸线的距离为340 m,与右岸线的距离为220 m,结合无人机测量数据可知,该采砂船未影响通航。
2.2.3 水上助航标志布设位置
某航道疏浚工程抛卸区位于某桥梁上游约500 m处,抛卸区靠航道一侧长度为180 m,需要配布一对发光水面侧面浮标,用于指引抛卸工作船及警示过往船舶,现使用三角法测算该标志布设位置是否符合要求,测算方法及步骤如下:
(1)从点起飞,调整航向正对浮标A后飞到其正上方,记录下点与该点距离数据(313 m)。
(2)调整航向角,正对浮标C后飞到其正上方,记录下点与该点的距离数据(454 m)。
(3)保持航向角不变,飞抵桥梁正上方,记录下点到浮标A、C连线与桥梁交点D的距离数据(911 m)。
(4)调整航向角,按原航线折返,找出点与AC延长线最短距离交点B,用A4文件纸贴近操控屏幕上的航线AC以及连线HB进行校正,保证∠B为直角,找出垂足B后记录下点与B点的距离数据(122 m)。
(5)综合上述数据(如图8所示),根据勾股定理计算出浮标A、C间距为149 m,浮标C与桥梁距离为465 m,經对比可知浮标布设位置与要求有一定差距,需进行调整。
3 无人机在航道管理中的快速判定应用使用效果分析
经过实践分析,无人机操作系统中的“与返航点距离”功能在航道管理中一些需要快速判定的情形中,有着极佳的使用效果,其优点有便捷、迅速、性价比高等。与全站仪等测量仪器相比,单人即可完成操作,步骤简单易懂,测算作业耗时短,使用门槛低,且基本不受地形、交通工具等因素的制约;与带测量功能的工业级无人机相比,目前市价千元级别的消费级
无人机均带有此项功能,可用于快速测算,性价比极高。
但无人机的局限性在于会受到天气因素制约,雨天和大风天气时无法使用,且受无人机定位系统精度、遥控器与连接手机的网络信号以及周围环境磁场影响,无人机与返航点距离数值会有一定误差。不过误差值在用于快速判定时是可以接受的,若后续有需要可使用更精确的仪器作进一步测量。
4 结语
本文通过对无人机在航道管理中的快速判定应用进行探索与实践分析,总结出直线法和三角法两种可应对多种情形的测算方法,验证了无人机操作系统中的“与返航点距离”功能在航道管理中一些需要快速判定情形中的应用有效性和可操作性,为航道管理探索出高效和高性价比的应用方法。
[1]王飞雄.无人机在航道管理中的应用浅析——以苏州航道为例[J].交通企业管理,2020,35(2):42-44.
[2]孙荣发.无人机航测技术在航道工程中的应用[J].工程建设与设计,2018(10):273-274.
[3]黄 湘,何 源,薛武申.无人机航测技术在水运勘察设计上的应用研究[J].西部交通科技,2017(1):98-101,108.
猜你喜欢
宏观质量研究(2022年4期)2022-07-16
垂钓(2022年1期)2022-02-09
垂钓(2021年5期)2021-05-31
中国科技纵横(2020年9期)2020-10-09
教学与管理(小学版)(2020年5期)2020-07-16
垂钓(2019年9期)2019-09-10
垂钓(2019年2期)2019-09-10
师道(2018年6期)2018-07-16
科技视界(2016年19期)2017-05-18
商业经济研究(2016年6期)2016-03-30
