一种仿人型体操机器人的结构设计与优化
2021-06-16 14:21韩瑞瑞王少坤
电子技术与软件工程 2021年5期
韩瑞瑞 王少坤
(西北农林科技大学水利与建筑工程学院 陕西省咸阳市 712100)
随着现代化、智能化的快速发展,智能机器人不断走向人们的视野中。并日益应用于餐饮服务、医疗康复、汽车与船舶等行业人机协作场合,帮助人类完成复杂繁琐的重复性工作。然而随着人们在物质生活的日益满足,对精神层面的生活要求也越来越高,所以娱乐性的体操机器人、舞蹈机器人、篮球机器人等应运而生。体操机器人是一种用于2020 中国机器人大赛工程竞技类项目中的比赛机器人,该机器人要完成走步、前滚翻、后滚翻、单手俯卧撑、双手俯卧撑、左右侧手翻、倒立、倒立劈叉等竞赛动作,裁判将依据机器人外形的类人程度和动作的完成情况来评定成绩[1]。为了完成所有规定动作并提高动作的连贯性,对体操机器人结构设计提出了更高的要求,同时这些设计和实践对类人型机器人研究和探索具有非常重要的参考价值。
1 体操机器人整体设计
1.1 整体结构要求和元器件选型
根据比赛发布的规则中要求的动作要求,以不多于14 个舵机为前提,对机器人整体结构进行设计。要求体操机器人腿部结构必须是具有垂直转动自由度,并满足静态时机器人腿部的水平向自由度中两个相邻关节最大展开角度不小于120°的规则要求。机器人整体必须有明显的头、手臂、躯干和双足等部分,与人体的结构比例相协调,机器人腰部以下要大于总高度的一半。体操机器人硬件系统分为三大部分:舵机,舵机控制器,连接结构件(包括舵机连接件、手部结构件、足部结构件)等。其中舵机选用RDS3115 舵机,其具有扭力大、连接方便等特点,是专用于机器人的数字舵机,如图1 所示;舵机控制器采用基于STM32 的16 路舵机控制板,并外加Arduino Nano 作为上位机进行控制,可以方便后期扩展功能。舵机连接件采用轻质铝合金材料,加强了机械本身的硬度,减轻了机器人质量[2]。如图2 所示。

图1:RDS3115 舵机
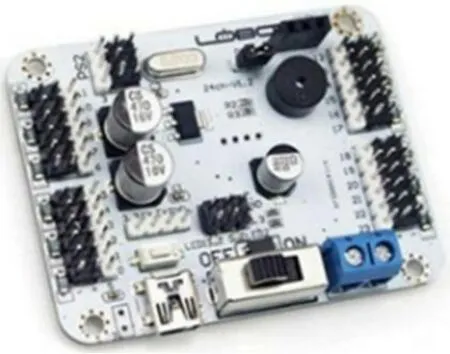
图2:16 路舵机控制版
1.2 机器人结构设计
根据竞赛规则要求,体操机器人的14 个舵机配置应该综合考虑机器人整体尺寸和伺服电机的驱动力矩, 确定机器人的中心位置为腰部,以腰部为分界线,从上肢、下肢两个角度进行舵机分配。人体上肢主要包括颈部、肩关节、肘关节和腕关节,以及其他较小的关节,为契合机器人研制目标,不再对如此数量庞大的自由度逐个还原,仅保留三个重要部分:颈部、肩关节和肘关节。将肩关节和肘关节的运动简化为上下摆动,所以双臂分别设计为两个水平的自由度共4 个舵机[3]。为了便于手臂的连接,颈部设计为两个舵机,上肢共设计六个舵机。手部结构件设计为一个梯形状手掌,方便动作及支撑。
下肢舵机的舵机分配要考虑机器人的行走功能。机构包括腿部和足部,腿部由大腿和小腿组成,连接躯干和大腿的关节称为髋关节;连接大腿和小腿的关节称为膝关节;连接小腿和足的关节称为踝关节[4]。比赛规则里的准备动作里有机器人的行走项目,所以腿部结构采用8 个舵机进行设计,每条腿是4 个舵机,分别为偏移重心舵机(踝关节舵机)、膝关节舵机以及髋关节(胯部舵机),其中膝关节且有两个舵机采用无机构件连接方式进行组装,从而使它的整体身高长度缩短,降低重心。足部结构件的设计是采用传统的正方形方案,受力更加均匀的,而且相比于竞速机器人常用的长方形板子或者弧形脚底板,正方形的板子面积小更有利于体操机器人完成前滚翻和后滚翻动作,在侧面滚翻时也会提供机器人较大的助力。第一代和第二代机器人实物图如图3 和图4 所示。
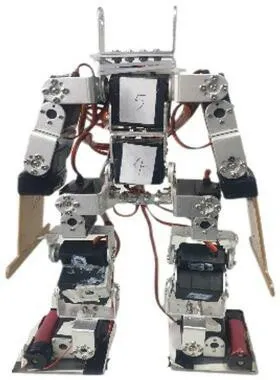
图3:第一代机器人实物图

图4:第二代机器人实物图
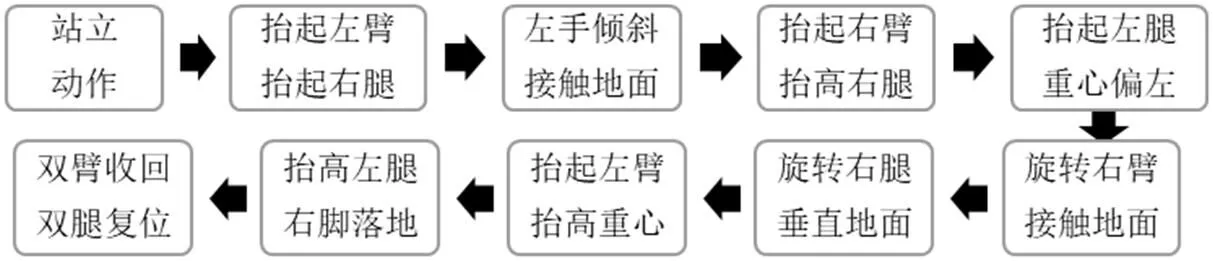
图5:做侧翻分解动作流程图
2 机器人设计优化
2.1 腿部结构改进
经实践发现上述方案设计出的体操机器人有以下缺点:
(1)腿部的无机构件连接方式不仅可靠性和便捷性差,且使机器人结构不完全对称,其重心不在机器人的对称轴上,导致步伐调试复杂,步长较短,且在完成劈叉站立动作时容易出现重心前倾现象。
(2)脚部偏移重心舵机与膝关节舵机整体协调度脚底,使机器人行走不平稳。
所以其腿部结构的优化与否决定了机器人能否顺利行走。要使机器人平稳的行走,首先要设计好机械结构其精确尺寸,还要把握住其各个关节的整体协调度。体操机器人的腿部以及脚步结构都要围绕着能让机器人更快,更稳的行走。机器人需要有严格的对称结构,并保证机器人的重心尽可能的低[5]。故我们优化为图6 所示结构,膝关节、胯关节舵机背靠背连接构成对称结构,既提高了舵机连接的稳定度,稳定了重心,又简化了后期动作调试,能够通过对称调节完成腿部角度的变化,顺利完成劈叉站立动作,其步长也明显增加。
2.2 手掌结构改进
根据体操机器人要完成动作的特殊性,手部结构件的设计也是关键一环。在完成侧翻和倒立动作时,我们的手臂会成为主要的受力对象和支撑对象,所以必须要有足够的硬度和合理的机械设计从而助力机器人完美完成动作。原梯形式手臂为木质结构且与舵机是通过简单的胶布缠绕连接,如果受力过大容易折断。因此吸取比赛的经验和其他优秀的机器人的结构,对机器人的手臂进行了创新和升级改造。基于此,我们更换手部结构件为通过机械连接的铝合金U 型手臂。如图6 所示。改进后的创新型手臂有使得机器人在完成比赛动作时更加流畅。下面以侧翻为例说明其优势。体操机器人的每一个动作都可以进行细分,将一个连续的动作分为几个关键的姿势,从而分步完成[6]。将左侧翻动作分为几个关键动作,分解流程图如图5 所示。
改进后的手臂前后两个支撑面,这样在侧翻的第二步骤抬起左臂,再抬起右腿时前面弧形支撑面可以给一个支撑力,使机器人平稳的与地面接触,受力平衡。接着在左手倾斜时重心左移步骤时又时可以用自带的倾斜手臂给机器人右上方倾斜的力使其快速平稳的翻过。
3 舵机控制器优化
在硬件电路板方面的改进是采用自主设计的全新型16 路舵机控制器。相比之前的舵机控制器,不仅可以实现对16 个舵机的控制,还集成了传感器输入接口,便于连接多种数字化传感器,不再需要Arduino Nano 的配合。为了实现机器人的控制,除了拥有强有力的硬件结构外,还必须有相应的软件系统进行配合。需要通过算法的编程,使机器人完成指定的动作指令[7]。故通过自主设计的编程平台,简单易上手,可以实现对RDS3115 舵机动作的实时控制和调整。结构的改变也引起了动作设计的改变,第二代机器人建立的动作库和程序代码也与第一代机器人的完全不同。舵机控制板如图6 所示,舵机控制板PCB 图如图7 所示。
图6:舵机控制板

图7:舵机控制板PCB 图
4 机器人调试与结论
仿人形的体操动作不仅考验机体自身质量的大小和舵机性能的优劣,更加考验机体自身的结构设计以及手臂部分和下肢部分的比例关系是否协调。所以综合运用了单片机控制、舵机控制、机械设计等知识,对机器人经过多次的设计改进和反复的调试之后,使得体操机器人在结构上更加的对称,行走步态更加平稳,舵机之间的运动更加协调,可以优异的完成比赛的要求动作,并且在自创动作的设计中又加入了高难度180°劈叉弓腰动作,很好地展示了硬件结构的稳定性,并取得不错的比赛成绩。
体操机器人相比于其他工业机器人,因为具有柔顺性、多变性、非结构化环境适应性好的优点,所以可以更好的实现机器人、环境和人之间的共融。因此随着科技的更加发展,在软硬件技术的结合之下,体操机器人将会有更好的发展前景。
猜你喜欢
日用电器(2023年7期)2023-09-07
玩具世界(2022年2期)2022-06-15
橡塑技术与装备(2021年5期)2021-03-16
电子制作(2019年23期)2019-02-23
经济技术协作信息(2018年8期)2019-01-14
纤维复合材料(2018年4期)2018-04-28
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
火控雷达技术(2016年2期)2016-02-06
中国全科医学(2013年26期)2013-01-25