基于GPRS DTU的远程可控水质监测船
2021-06-16 14:21李秋慧李洁王传敏孙洋
电子技术与软件工程 2021年5期
李秋慧 李洁 王传敏 孙洋
(滨州学院航空工程学院 山东省滨州市 256600)
随着我国经济的快速发展,人口的不断增加,城市化进程加快,我国的水环境污染问题越来越严重。大部分湖泊污染严重,富营养化加剧。由于城镇工业超量排放污水导致许多中小河流严重污染,无法被人类所使用。近年来国家对水污染问题越来越重视,环保部发布了《国家环境保护标准“十三五”发展规划》,国家要求重污染企业对工业废水进行集中处理,禁止偷排污水。但一些企业为节约成本,偷排工业污水,导致水资源污染严重。
针对水质污染问题,本文设计了一款远程可控水质监测系统。特点是提高水质监测的效率,可实时传输水质监测数据,在上位机上实时显示监测船的位置轨迹,并实现对监测船行驶方向的控制,采用太阳能供电,使其可长期在外工作。
国外的无人监测船发展较早,主要是利用网络同步以及卫星通信等技术来实现水质数据的传输。如葡萄牙波尔图大学研发的“剑鱼”,可完成对多种水质数据的采集。国内水质监测船的研究也在蓬勃发展,比如珠海云洲智能科技有限公司研发的移动水质监测船,该监测船采用RF 无线视频点对点双向通信方式,可实现导航和自主定位功能,以及对水体富营养化的监测和对地表水进行采样。
1 总体设计方案
本文设计的远程可控水质监测船主要由水质监测模块(温度传感器、PH 传感器、浊度传感器、电导率传感器)、STM32F103ZET6控制芯片、GPRS DTU通信模块、螺旋桨电机模块、太阳能电池板供电系统等部件构成。水质监测模块可实时检测水域温度、PH、浊度、电导率等水质数据。STM32F103ZET6 控制芯片将传感器检测到的水质数据通过GPRS DTU[1]传输到原子云上,并在上位机上实时显示水质数据及监测船在地图上的定位轨迹。上位机发送指令由GPRS DTU 通信模块传输到stm32f103zet6 控制芯片来控制水质监测船的行驶方向,并在监测船上安装超声波测距模块来规范监测船的行驶路径,能使监测船有效的躲避障碍物,提高了监测船的工作效率。由太阳能板给监测船提供电能,可使监测船长期在外工作。图1 为水质监测船的系统整体结构图。
2 硬件介绍
2.1 STM32F103ZET6最小系统
STM32F103ZET6 的最高工作频率为72MHz,内嵌8MHz的RC 振 荡 器, 芯 片 具 有64KB SRAM 和512KB FLASH。STM32F103ZET6 采集水质传感器数据,并将采集到的数据通过串口通信传输给GPRS DTU。
2.2 GPRS DTU通信模块
GPRS DTU 通信模块来实现STM32 与服务器端的双向数据透传,图2 为该系统中GPRS DTU 模块采用的通信方式。GPRS DTU通信模块将监测船检测到的数据传输给原子云,以及将监测人员发出的控制信息通过原子云传输给STM32。STM32 采用RS232 接口与GPRS DTU 通信模块进行通信。
2.3 PH、温度传感器
本系统采用DS18B20 温度传感器和PH 检测传感器[2]来采集水域温度和PH 值。DS18B20 温度传感器将温度值转化为数字温度信号,温度信号采用串行通信传送给CPU。PH 传感器采用图3 所示的信号放大电路放大PH 信号,提高了PH 测量的精确度和温度稳定性。PH 电极输出电压信号,通过电位器调节使电压转换为0-3V模拟量输出,STM32 通过模数转换使之转化为相应的PH 值。

图1:系统整体结构图

图2:GPRS DTU 网络透传模式

图3:PH 信号放大电路

图4:浊度与电压关系曲线

图5:上位机软件界面
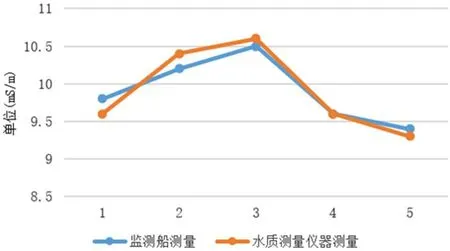
图6:PH 测量结果
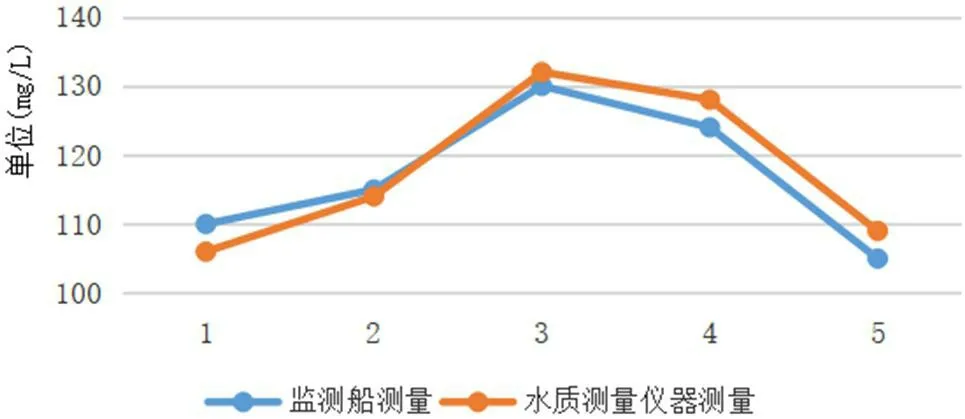
图7:浊度测量结果

图8:电导率测量结果
2.4 浊度传感器
浊度传感器[3]利用光学原理,通过测定水环境中微粒的散射光强度来测量水样的浑浊度。当光线通过被测液体时产生了随浊度变化的电信号,浊度传感器模块将传感器输出的电流信号转换为电压信号,图4 为浊度与电压的关系曲线,STM32 通过模数转换使模拟电压信号转化为相应的浊度值。
2.5 电导率传感器
电导率传感器电极采用DJS-1C 铂黑电极,增加了电极的有效面积,有效降低了电极的极化。初次使用模块前对电导率模块进行校准提高了测量精确度。
2.6 供电模块
该系统供电方式为两种,供电方式主要是由太阳能电池板给可充电锂电池充电,然后由可充电锂电池为系统提供电能。当太阳能电池板无法提供电能且锂电池电量较少,则由预备锂电池为系统提供电能。
3 软件设计
3.1 上位机设计
该水质监测系统上位机由Visual Studio[5]软件编写,主要功能包括水质数据的实时显示、监测船位置显示、监测船运动控制。图5 为上位机软件界面,上位机填入监测船所连接的原子云token,点击获取数据,若设备列表显示原子云连接的所有设备,即表示完成了上位机与原子云的连接。GPRS DTU 通信模块将监测船数据传输到原子云上,编写上位机原子云API 接口[6],则原子云将接收到的温度、PH 值、浊度值、电导率等水质监测数据传输到上位机上,并在上位机上实时显示。通过编写百度地图API 接口,即可在上位机上实时显示监测船的经纬度并显示监测船在地图上的位置,便于观察水质监测船的运动轨迹。在上位机上可控制监测船的运动方向,并显示监测船当前运动状态。
3.2 数据传输
GPRS DTU 插入SIM 卡,并设置GPRS DTU 的参数信息,写入对应原子云的设备编号与设备密码,完成初始化配置。GPRS DTU 通信模块通过MODBUS RTU[7]传输协议实现水质监测设备与原子云通信,使用keil 软件编写STM32 的串口通信程序,STM32和GPRS DTU 均由RS232 串行通信接口连接进行数据传输,实现监测船数据包的传输。GPRS DTU 可在网络透传模式下使用心跳包机制[8],GPRS DTU 支持断线重连功能,可使水质监测系统与服务器稳定连接,使水质监测数据的传输更加稳定可靠。
3.3 控制系统
STM32 接收来自上位机传输的相应信号,并通过改变螺旋桨电机的转速以及转向来改变水质监测船的运动轨迹。为了提高监测船在外工作的实用性和可靠性,除了可人为对监测船的方向进行控制,我们在监测设备上安装避障[9]模块,监测船可自行对行驶方向进行细微调整,并且系统的电机控制程序采用PID 算法[10],可避免水域环境剧烈变化导致的监测船偏航。
4 系统测试
本系统完成了相关设计要求,并在湖泊中进行了相关参数的测试。经测试,系统上位机可及时接收监船发出的水质数据及监测船地图位置,并可实现水质监测船运动轨迹的控制以及监测数据的采集。图6、图7、图8 分别为PH、浊度、电导率在五处地点水质监测船测量数据与专业水质测量仪器测量数据的曲线图,根据测量曲线图所示,该水质测量模块所测结果与标准测量结果误差较小,满足水质测量要求。图9 为该系统的系统流程图。

图9:系统流程图
5 结论
本文针对水质污染问题设计了一款水质监测系统,该水质监测系统可实时检测水域污染情况,监测设备可将温度、PH、浊度、电导率等水质数据及监测船位置实时传输给监测人员,并且监测人员可通过上位机控制监测船运动轨迹。该系统可有效提高水质监测人员的工作效率,减少监测设备成本,具有广阔的应用前景。
猜你喜欢
供水技术(2022年1期)2022-04-19
云南化工(2021年6期)2021-12-21
车迷(2018年12期)2018-07-26
酒·饮料技术装备(2018年1期)2018-04-28
浙江工业大学学报(2017年5期)2018-01-22
现代园艺(2017年23期)2018-01-18
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
学习月刊(2015年3期)2015-07-09
技术与教育(2014年2期)2014-04-18