录井传感器模拟与自动识别系统研究
2021-06-16 11:55何志敏梅大成
电子技术与软件工程 2021年6期
何志敏 梅大成
(西南石油大学计算机科学学院 四川省成都市 610500)
1 引言
录井技术是钻井井控工作的一项基础技术,符合时代发展的基本需求,能够科学分析出地质结构的整体构成情况及潜在的安全风险因素[1]。传统的综合录井培训是通过阅读录井培训手册、听取有经验的录井人员的讲解、参加录井现场实际操作等方式,传统的综合录井培训方式已经很难适应当前高节奏、高效率的石油天然气工业生产发展需要[2]。录井模拟培训系统通过对现场环境和仪器的仿真,使室内培训效果接近现场,从而降低培训成本和风险。在录井模拟培训中,一个关键的问题是培训人员要能识别各种传感器,并且在操作过程中,将各种传感器安装到正确的位置。每次操作,系统需要判断出对应位置所安装传感器是否正确,如果正确,给出提示,显示当前传感器的值,并以动画形式将该传感器所处真实位置在图形上放大显示。如果错误,系统给出错误提示。
2 传感器模拟与自动识别系统硬件设计
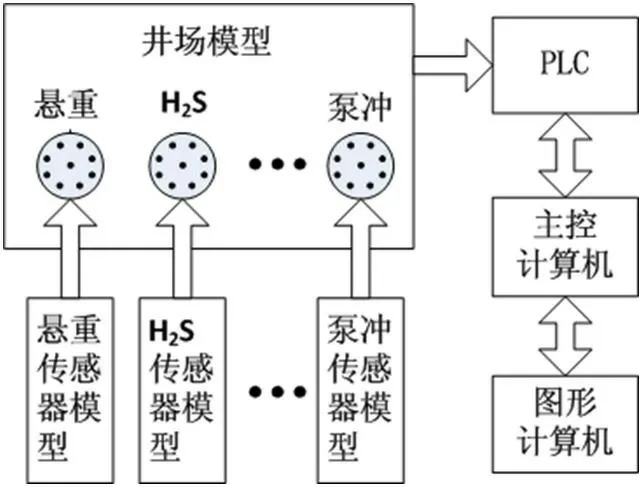
图1:传感器模拟与自动识别系统硬件结构
2.1 系统整体结构
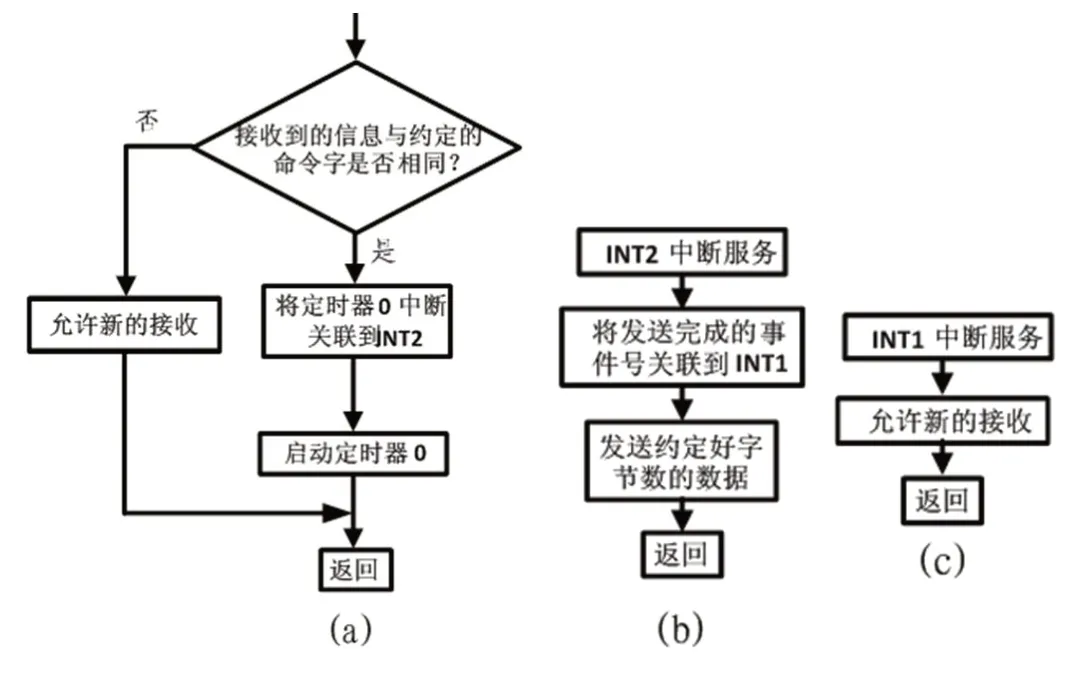
图2:PLC 接收和发送数据流程图
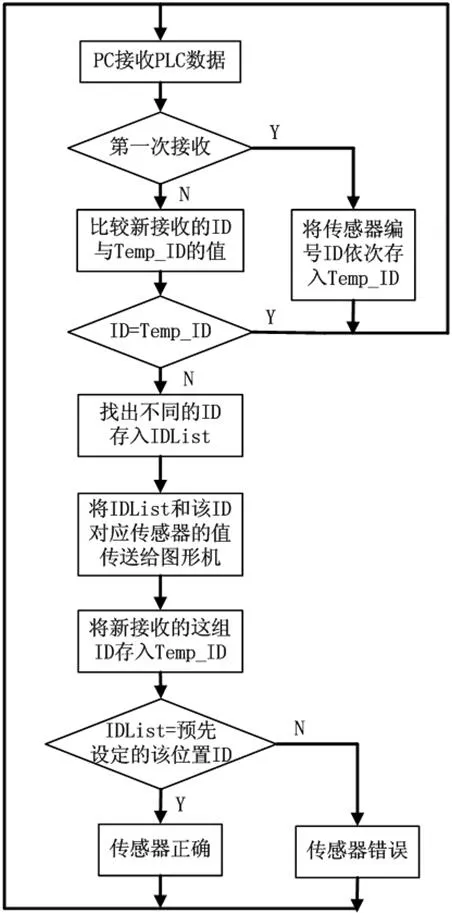
图3:主控机传感器识别程序流程图
由于钻井工艺环境的要求,现场使用的多是特殊定制传感器,价格一般都比较昂贵[3]。本着经济、耐用的原则,录井模拟培训系统采用传感器模型来代替真实传感器,大大降低了在培训过程中由传感器使用损耗而产生的费用。生产现场,录井传感器分布在井场的各个区域,而录井模拟培训系统的硬件采用的是按真实比例缩小的井场模型,该模型包括钻井平台、电机房、灌区、泥浆泵等。由于井场模型体积较小,不便于在其真实位置安装传感器,只用小标牌在其安装位置标识传感器名称,而在井场模型平台上设置多个航空插座,用来模拟传感器的安装位置。传感器模拟与自动识别系统由传感器模型、井场模型、主控机和图形机几个部分组成,其硬件结构如图1 所示。
传感器模型通过9 芯航空头连接到井场模型平台的航空头插座上,传感器的值通过PLC 采集后传送给主控计算机,主控计算机实时显示当前传感器的状态,并发送消息给图形计算机,由图形计算机播放该传感器动画,将其在现场的具体安装位置、当前值大小等模拟出来。
2.2 传感器模拟
传感器的主要作用是把现场的录井参数转化为电量,并对其进行初步处理[4]。录井传感器的工作环境比较恶劣,现场对传感器的特性选择要求比较严格,在录井模拟系统中,我们采用1:1 的传感器模型来对真实传感器进行模拟。模拟过程需要实现两点要求:一是每个模型能模拟传感器的输出值,此值是要能随时改变的值;二是每个传感器在钻井模型平台上都有一个固定的位置,传感器模型必须能产生位置编码,才能判断是否安装到了正确的位置。
2.2.1 传感器输出值的模拟
录井模拟培训系统需模拟的传感器有悬重传感器、H2S 传感器、出口/入口温度、出口/入口密度、出口/入口电导率、转盘扭矩、立压、套压、液位、电扭矩、转盘转速、绞车、泵冲、出口流量等17 个传感器,其中,现场的绞车、转盘转速和泵冲传感器输出的是脉冲信号,其余的传感器输出的是4~20mA 的电流信号。传感器模型输出的数据由PLC 采集,PLC 作为一种稳定可靠、控制程序灵活可变的控制器,在工业控制系统中已经得到了广泛的应用[5]。PLC 选用的是Siemens 公司的S7-200,可以对0~10V 电压或者4~20mA 电流进行采集。为了简化传感器模型的设计,所有模型的传感器值均采用10K 电位器串接14K 电阻连接到24V 电源,通过电位器分压获得0~10V 的电压值来模拟传感器输出值。S7-200将传感器的值传送给主控机后,再由主控机按真实传感器的特点进行处理。
2.2.2 传感器位置编码的产生
钻井模拟平台上有17 个航空头,每个航空头代表一个传感器的位置,事先设定各个航空头的编号。每个传感器模型需输出对应的位置编码,17 个传感器模型需用5 位二进制编码来代表其位置。为了产生这5 位编码,可以采用多种方案。比如可以在每个模型中放一个旋转编码器,事先设定好编码器的旋转刻度,让其输出的编码保持一个特定的数值。但是由于有的传感器模型体积较小,市面上的旋转编码器无法放入其中,而且编码器的价格也较高,每个传感器只用其一组编码,浪费较大。经过多种方案对比,最终采用5位拨码开关来实现位置编码。拨码开关体积小,价格便宜,能轻松地实现1~17 的编码。将此5 位拨码开关和电位器放入传感器模型内并将其输出信号接到9 芯航空头上,再由航空头输出到PLC。
3 传感器自动识别系统软件设计
3.1 主控软件与前端硬件的通信
录井模拟培训系统的主控软件必须持续不断地与前端硬件进行通信,以获取前端设备状态,然后经过主控软件处理,可以驱动图形软件产生与硬件设备操作同步的动画过程,因此,主控软件和前端设备的双向、高速、稳定的通信是整个系统需要解决的一个关键技术问题。传感器自动识别系统中,主控计算机作为主站,它通过串口与S7-200 之间通过Siemens 的PPI 电缆相连, S7-200 作为从站,工作在自由口模式下[6]。
3.1.1 PLC 与主控机通信协议
在自由口通信模式下,用户需要自定义通信协议[7]。本系统中,主控计算机与PLC 之间的通信采用主从方式:主控计算机始终处于主机地位,具有初始传送优先权,所有通讯均由PC 机来启动。PC 机首先按照约定的字符格式和波特率初始化串口,然后按命令字格式发送命令字给PLC,接着按约定字节数读取数据,这样便完成与PLC 的数据传输。接着发送新的命令字开始下一次传送,循环进行。PC 发送的命令字格式如下所示:

图4:传感器状态展示
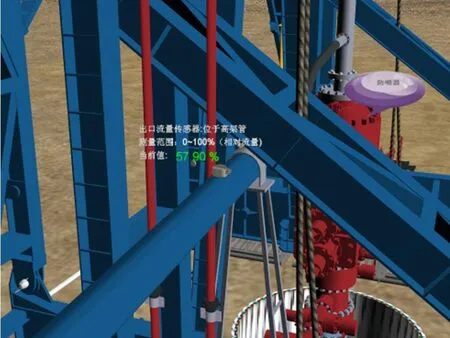
图5:图形软件传感器动漫展示

‘U’ ‘U’ ‘U’ ‘U’ ADDR
本系统中,命令字为“UUUU”+用一个字符表示的地址编号, PLC 在接收命令字时为接收5 个字节,在接收完成后立即转为发送约定好字节数的数据给PC,发送完后又设置为接收5 个字节。PLC 发送给主控机的数据帧格式如下所示,先发送每个传感器的当前值,然后发送每个传感器的位置编码。

悬重 H2S …… 出口流量 传感器1编码 …… 传感器17编码
为了实现自由口通信,PLC 在对端口初始化时,需要对相关特殊存储器位进行配置。特殊存储器位SMB30 为端口0 通信配置波特率、奇偶校验和数据位[8]。本系统中,设置SMB30 的值为16#90,即无奇偶校验、每个字符8 位、波特率9600、自由口通信模式[9]。配置SMB87 为16#90,即允许接收、忽略SMB88、忽略SMB89、使用SMW90 或SMW190 数值检测空闲线条件、定时器是字符间的超时计时器、忽略SMW92 或SMW192、忽略断点条件。配置SMW90 的值为16#5,即设定空闲线时间为5ms,当空闲线时间超过5ms 后,收到的第一个字符是新信息的开始[10]。设置SMB94 为16#5,即初始化接收5 个字节的命令字。
3.1.2 PLC 与主控机数据传送
为了保证系统数据能实时传送,PC 与PLC 直接采用中断方式进行通信。接收和发送数据流程图如图2 所示。PLC 接收完PC 机发送的5 个字节命令字后进入中断服务程序INT0(图2(a)),在中断服务程序中判别命令字是否为之前约定好的命令字,如果不是,就返回,重新接收命令字。如果是,启动定时器定时5 毫秒,之后进入发送中断服务程序INT2(图2(b))中,发送约定字节数的数据给PC。当数据发送完成后,进入接收中断服务程序INT1(图2(c)),允许接收新的命令字。
3.2 主控软件传感器识别
主控计算机每隔200ms 和PLC 进行一次通信,接收到PLC 发送的数据后,可以获得每个传感器当前值以及传感器位置编码。主控机需要做如下几个判断:一是判断出学员当前安装的是哪一个位置的传感器;二是装上的传感器是否正确;三是传感器的当前值。主控软件对传感器的对错做出提示,并显示传感器的值,同时将这些信息发送给图形机,让图形动画与实际操作同步。主控机传感器识别的数据流程如图3 所示。
4 结论
传感器自动识别系统实现了传感器操作的捕捉、传感器识别与判别、传感器动画演示等功能。图4 为系统运行时主控软件采集到的传感器数值,图5 为图形程序实时展示的动漫场景。
录井模拟系统经过实验室测试目前已交付延安职业技术学院使用,经油田应用表明,系统功能完善,操作直观,培训效果好,值得进一步推广和使用。
猜你喜欢
云南化工(2021年10期)2021-12-21
特别健康(2018年3期)2018-07-04
录井工程(2017年3期)2018-01-22
录井工程(2017年1期)2017-07-31
录井工程(2017年4期)2017-03-16
发明与创新(2016年26期)2016-08-22
电测与仪表(2016年6期)2016-04-11
当代化工研究(2016年5期)2016-03-20
石油石化节能(2016年8期)2016-02-05
河南科技(2015年3期)2015-02-27