芸豆智能除草机器人总体结构设计*
2021-06-18 06:14董晓威
南方农机 2021年11期
王 明 , 董晓威 , 王 森 , 张 冰
(黑龙江八一农垦大学工程学院,黑龙江 大庆 163319)
0 引言
芸豆是一种重要的豆科经济类作物,学名菜豆,俗称二季豆或四季豆。芸豆田里主要出现的杂草有稗草、狗尾草、野黍、野燕麦等十几种,可采用人工或化学除草[1]。随着生活水平的提高和消费观念的转变,市场对无公害、有机蔬菜的需求不断增加;同时国家也在大力提倡绿色农业,改善农业农村环境,推进农业资源高效利用及生态农业建设。机械除草工作效率较高、对环境污染小,符合绿色农业的发展需要,是有机农业种植过程中最佳的除草方式。
国内外学者进行了不同类型除草机器人的相关研究,近年来持续增加投入,性能不断提高[2]。Bawden等人基于模块化设计方法,研制了一种多模式作业的除草机器人,配备了智能视觉识别系统,可根据作业的实际情况选择机械除草或化学除草[3]。Utstumo等人设计了一种能够进行精确施药的智能除草机器人,大幅度地降低了除草剂的使用量[4]。Sori等人研制了一种全自动智能水田除草机器人,通过搅拌土壤阻止杂草进行光合作用,从而达到去除杂草的目的[5]。周俊等人针对除草机器人的导航系统进行了深入的研究,对提高机器人除草准确性和效率具有重要的意义[6-7]。王璨和孙俊等人提出了基于图像特征和人工神经网络的杂草识别模型,能够提高除草机器人杂草识别的准确性,进而提高除草效率[8-9]。笔者针对芸豆种植过程中杂草的去除问题,设计了基于机器视觉识别技术的两种除草机器人的总体结构,分别为轮式和履带式,以满足芸豆绿色除草的工作要求。
1 轮式除草机器人
1.1 除草刀设计
剪切式除草刀主要由整体支架、刀片、动力装置组成,具体结构如图1所示。剪切式刀具除草精度较高,但效率较低。
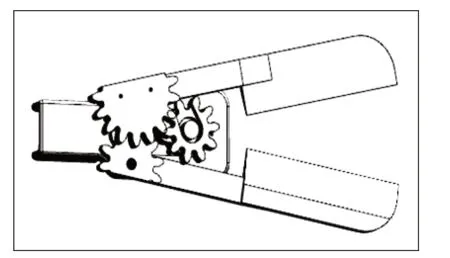
图1 剪切式刀具
1.2 整体结构
除草机器人的结构如图2所示,采用剪切式刀具,除草刀及机械臂的动作由舵机进行控制,对杂草的适应性强。该智能除草机具有结构简单、运行稳定、除草准确、不易堵塞的特点。
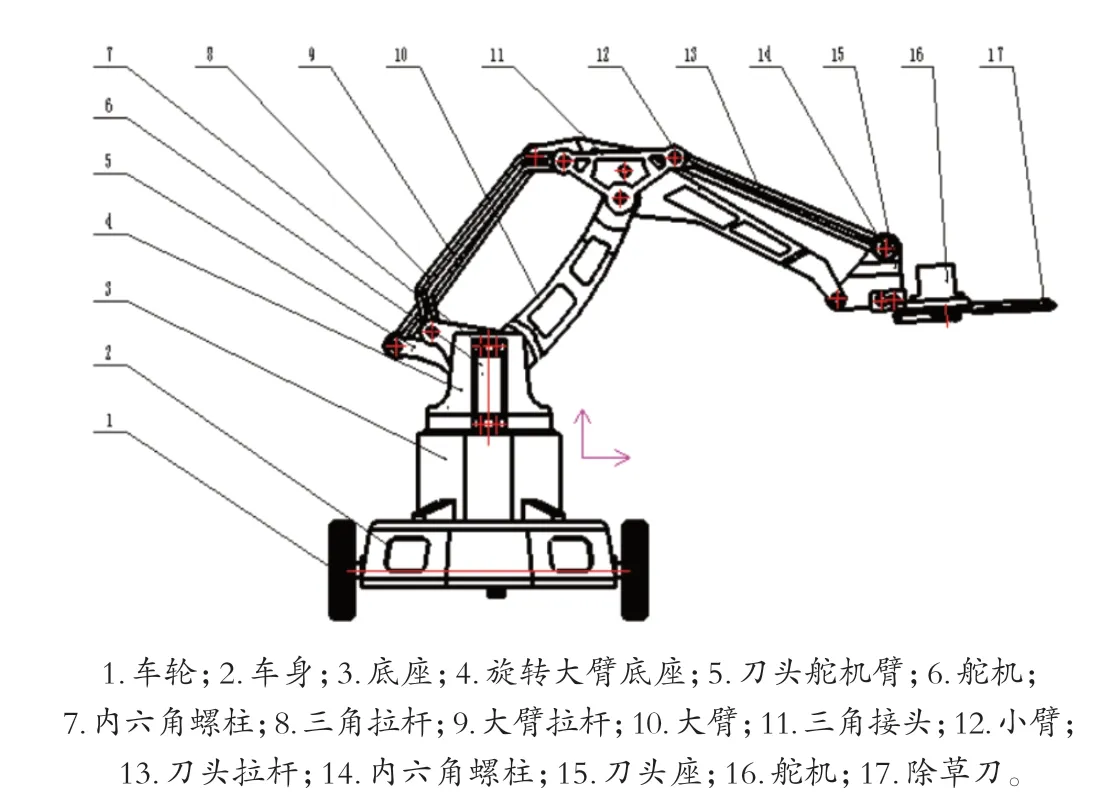
图2 轮式除草机器人结构简图
2 履带式除草机器人
2.1 除草刀设计
除草刀片结构如图3所示,为了保证其使用要求,材料选用65Mn钢,硬度一般为42~50 HRC。刀盘采用花键轴和螺钉进行定位并保证精度,使用紧固螺钉和垫片固定。刀盘与发动机输出轴的动力传输为花键,在花键轴上加工一个直径为3 mm的螺纹孔,并通过平头螺钉顶紧发动机输出轴上的豁口以达到夹紧的作用。
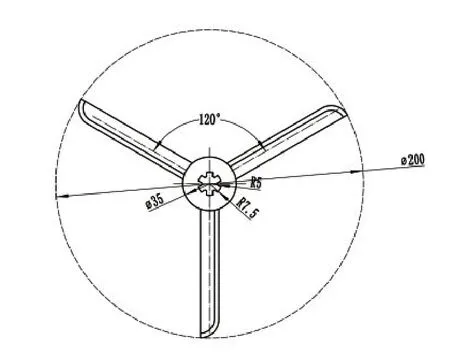
图3 刀片结构
刀头罩结构如图4所示,在工作的过程中会产生一定的震动,材料选用HT100,该材料满足精密铸造加工的使用要求,同时具有吸震、自润滑性、高压缩性等特点,可用于箱体、壳体、滑轨等工件的铸造加工。工件下部分形状为半包围结构,上部设置安装调角接头的接口,通过M6×45的螺栓与调角接头连接,固定在旋刀臂的前端。刀头罩能够将较高杂草压倒至旋刀工作高度,提高除草效率;同时起到安全防护与聚拢杂草的作用,避免刀片高速旋转过程中对操作人员的意外伤害。刀盘高速旋转时会产生较大的气流,被切断的草屑会随着气流旋转并排出,避免由于草屑堆积造成刀盘停转的情况发生。
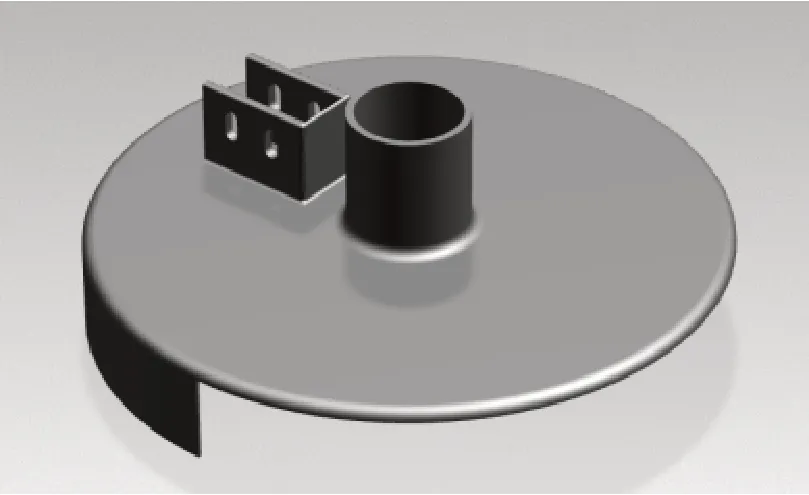
图4 刀头罩结构
2.2 整体结构
履带式除草机器人结构如图5所示,采用双回旋式刀头,在一定范围内可调节高度和宽度以适应不同的垄间距。拢草耙功能为除草后杂草的收集和清理,材料为尼龙,具有弹性好、耐磨性高、价格低廉的优点。刀头的旋转由一个直流电机进行驱动,刀头和拢草耙的升降由舵机控制;移动底盘为履带式,能够适应复杂的地面情况。该机器人具有结构紧凑、操作简单、运行稳定、移动方便、除草效率高的特点。
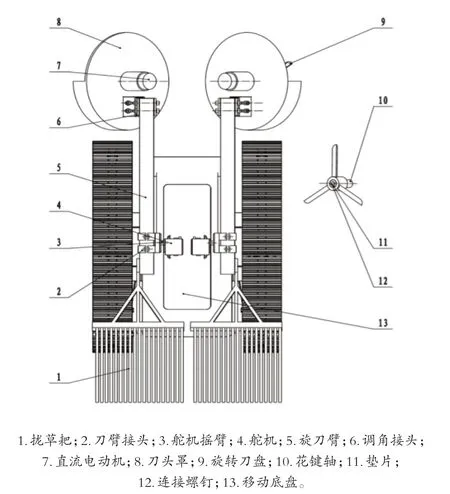
图5 履带式除草机器人结构简图
3 结论
笔者设计了基于视觉识别技术的轮式和履带式两种除草机器人的总体结构。轮式除草机器人采用剪切式刀具,具有结构简单、运行稳定、除草准确、不易堵塞的特点,但除草效率相对较低;履带式除草机器人采用可调节双回旋式刀头,配有拢草耙,可进行杂草的收集和清理,具有结构紧凑、操作简单、运行稳定、移动方便、除草效率高的特点。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
风流一代·青春(2020年6期)2020-06-19
学前教育(幼教版)(2018年6期)2018-05-14
小康(2017年31期)2017-11-14
烹调知识(2017年8期)2017-08-07
人间(2015年23期)2016-01-04
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
筑路机械与施工机械化(2014年4期)2014-03-01
医疗装备(2011年4期)2011-12-09